基于无人机遥感技术的大豆苗数估算研究*
2022-04-24李金阳张伟康烨许秀英亓立强石文强
李金阳,张伟,康烨,许秀英,亓立强,石文强
(1. 黑龙江八一农垦大学工程学院,黑龙江大庆,163319;2. 黑龙江省保护性耕作工程技术研究中心,黑龙江大庆,163319)
0 引言
大豆苗数估算研究对于大豆田间出苗情况的评估起着重要作用。无人机遥感技术可以实现大范围内空间图像等相关信息的快速获取[1],目前,已有学者应用无人机遥感技术开展了对不同作物苗数估算的研究,但专门针对苗期大豆苗数估算的研究较少。
Feng等[2]利用无人机获取棉花幼苗图像,基于深度学习算法用于棉花出苗评估,误差为4.4%。刘志等[3]通过无人机获取玉米幼苗图像,对玉米幼苗的识别和分割结果有助于实际生产过程中对玉米植株的统计和出苗率的计算。Sankaran等[4]通过在无人机图像上选择适当的多边形阈值区域,实现了对马铃薯的出苗估测,但与实际计数误差较大。Jin等[5]基于无人机图像,使用支持向量机及粒子群优化算法估算了苗期小麦株数和密度,方法的可重复性很好,但数据处理过程繁杂。Liu等[6]通过小麦苗期无人机图像,使用区域定位算法计算缺苗区域长度,为有效测量小麦出苗均匀性提供了一种新方法。Gnädinger等[7]通过对不同生长阶段的玉米植株无人机图像进行增强颜色对比度和创建阈值处理后估算株数,误差≤5%,但杂草会影响其结果的准确性。
为了提高大豆苗数估算的准确性、解决因田间杂草影响较大带来的出苗估测误差较大等问题,以苗期获取的无人机图像为研究对象,通过分析不同植被指数、直方图均衡化及Otsu阈值算法对大豆目标的提取结果,开展大豆苗数估算研究,以期快速评估大豆田间出苗情况,更好的服务生产实际问题。
1 材料和方法
1.1 试验地概况
试验在广东省湛江市南亚热带作物研究所循环农业研究中心进行,试验地块地理位置为东经110°20′、北纬21°10′之间,土壤类型为红壤土。
选取试验地大小为54 m×11 m,采用1.1 m垄上三行的种植模式,即在1.1 m的垄台上均匀种植三行大豆,充分利用垄台的边际效应,通过减小大豆植株间的行距来扩大种植密度进而实现密植栽培,提高单位面积的保苗株数来提高作物产量[8]。本试验中最外侧两行大豆行距为450 mm,每两行行距为225 mm。
1.2 图像获取及预处理
无人机采集平台提供了灵活和即时的图像处理功能,其可变的飞行高度和更好的图像分辨率等处理选项适用于面向大豆目标的使用[9-10]。试验中采用大疆精灵4多光谱版无人机作为图像数据采集平台,通过DJI GS Pro软件设置无人机飞行参数,包括在指定区域内设置航线并完成相关数据的接收和处理过程。为了在较短的时间内获得所需图像,无人机采用“S”型的飞行路线。试验航向重复率设置为80%,旁向重复率设置为70%,飞行高度设置为5 m。相机型号为P4 Multispectral Camera,相机朝向沿航线方向,拍摄时镜头垂直向下,采用航点悬停拍照模式。
利用无人机飞行平台采集的图像具有很大的重叠率,如果直接用来提取苗情信息,难以反映大豆实际生长情况,因此,对图像进行预处理操作,即图像拼接、图像裁剪和图像切割。无人机飞行过程共拍摄图像3 650幅,获取无人机图像的POS数据,利用Agisoft PhotoScan软件对图像进行拼接处理,如图1所示为图像拼接流程图。
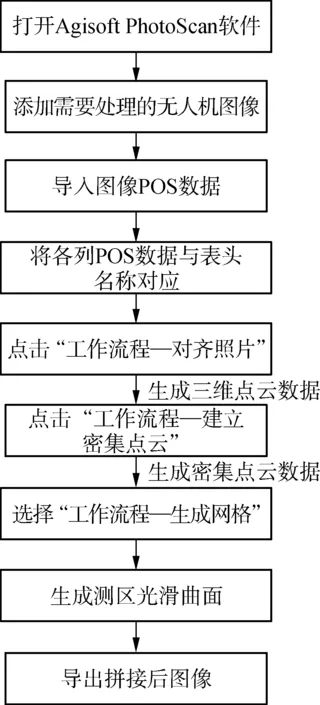
图1 图像拼接流程图Fig. 1 Image mosaic flow chart
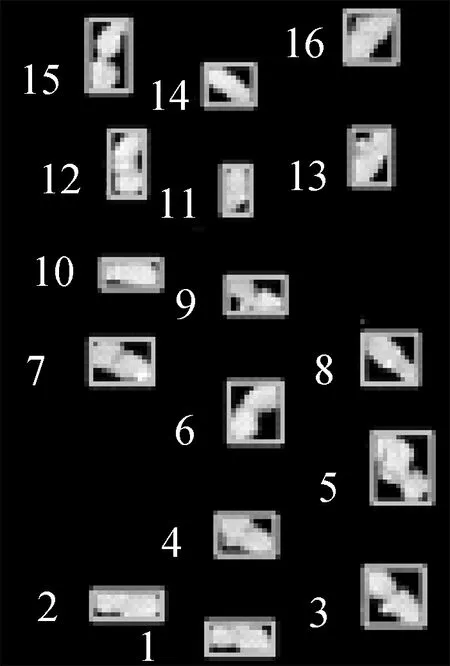
由于拼接时图像边缘数据畸变较大,存在较多异常值,这会影响算法设计和模型的建立。因此,需要在拼接的图像上手动裁剪,剔除边缘区域,选择合适的研究区。为便于后续试验开展,将研究区切割成24份大小一致的区域,如图2所示。
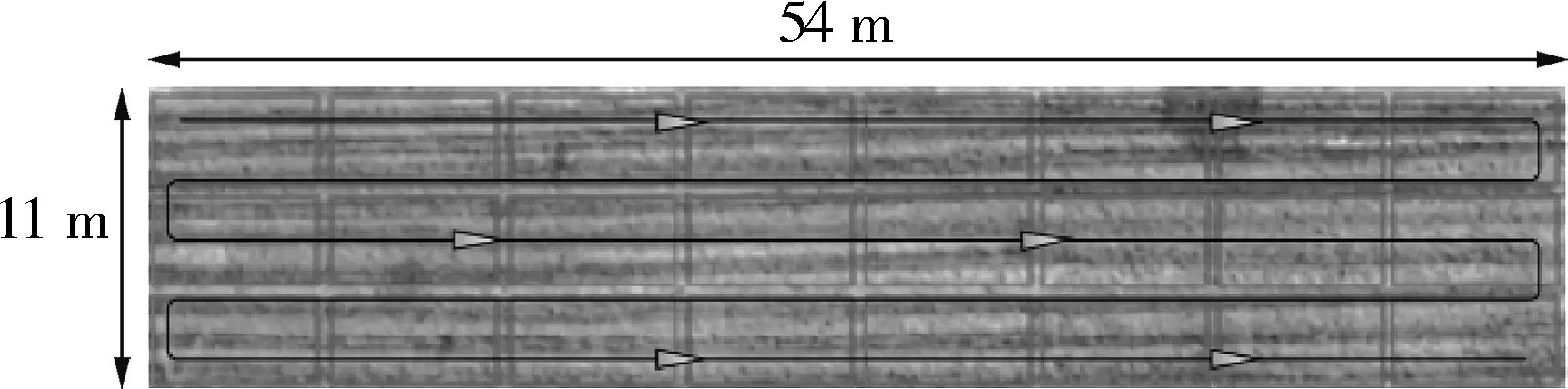
图2 图像切割示意图Fig. 2 Image cutting schematic
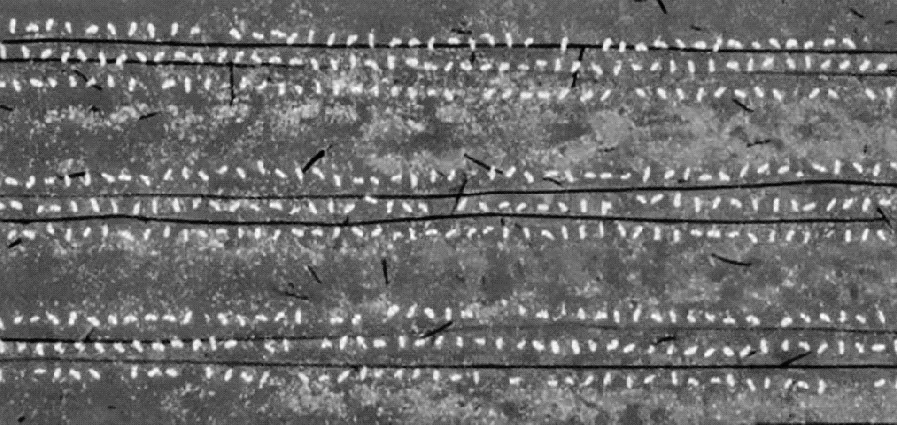
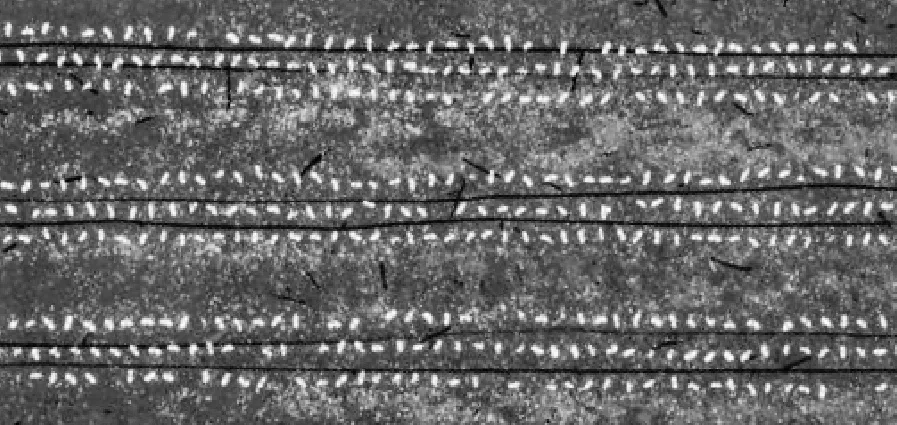
在图像切割的过程中,产生的椒盐噪声会对图像的分割与识别以及特征提取等操作带来影响。为了保留图像的边缘轮廓、使图像清晰,使用中值滤波算法对采集的图像进行处理,去除椒盐噪声。如图3所示为切割后原始图像,如图4所示为中值滤波效果图。
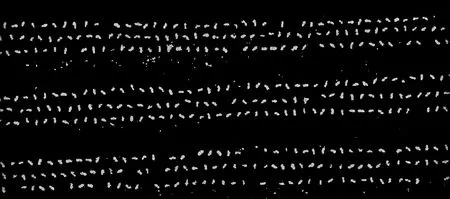
图4 中值滤波效果图Fig. 4 Median filtering renderings
1.3 大豆目标的识别与分割
本文采用的算法流程图如图5所示。
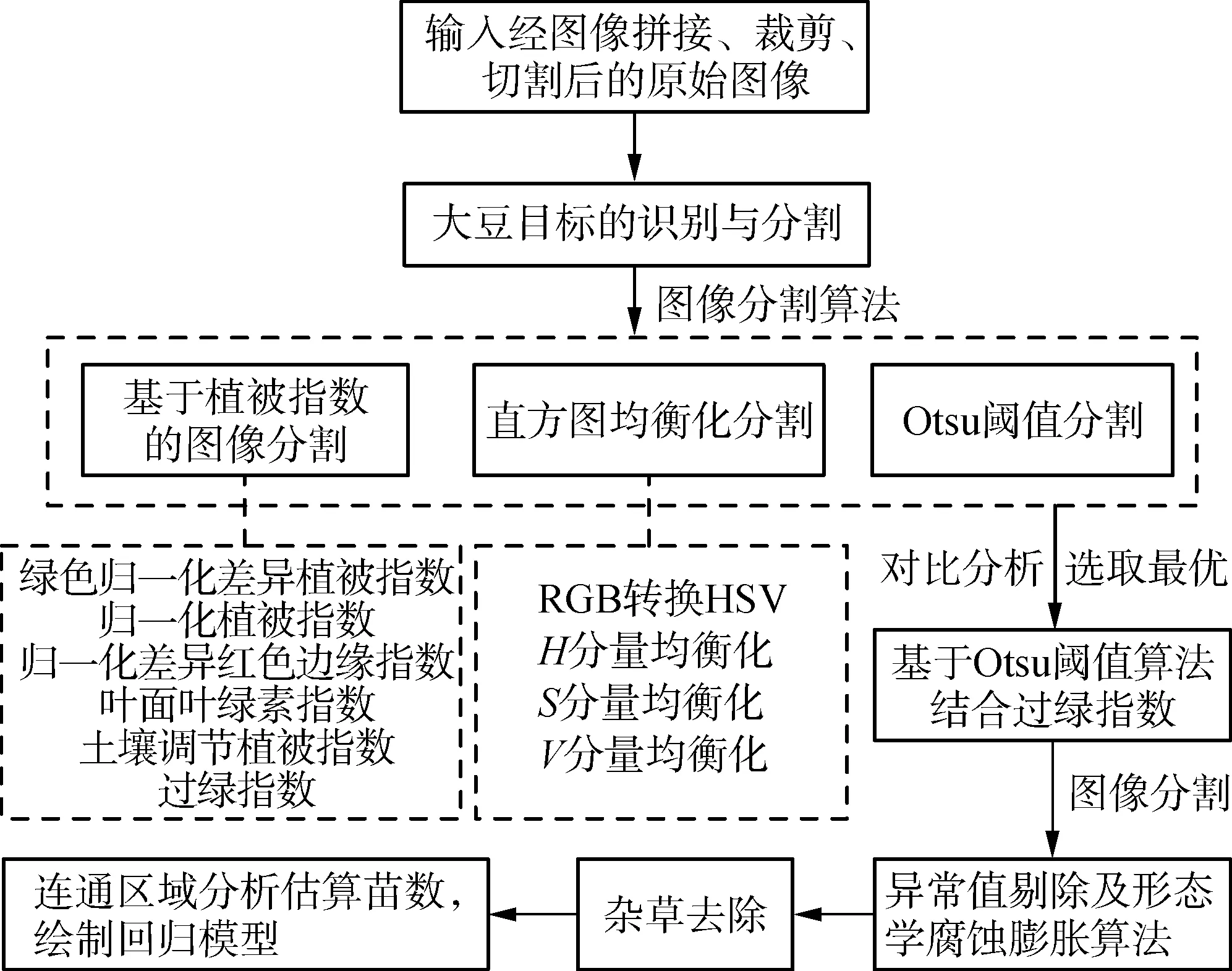
图5 算法流程图Fig. 5 Algorithm flowchart
图像分割作为图像处理中的关键一环,对图像分析结果有很大的影响,图像分割通过把图像划分为若干个区域,从中提取出感兴趣区域,是精准农业、植物表型研究的关键技术[11],可以高效、无损的获取农作物信息,实时了解作物生长动态,更好的管理作物。通过采用多种方法对大豆目标进行提取,选择出可用于大豆目标分割的最佳方法。
1.3.1 基于植被指数的大豆目标识别与分割
目标识别和分割的关键是将识别对象与背景分离,植被指数在农业作物鉴定中应用广泛[12]。大豆田间可见光图像由豆苗、杂草、滴灌管和土壤四部分构成,豆苗和杂草呈绿色、土壤呈红棕色、滴灌管呈黑色,根据颜色特征可采用植被指数对图像进行识别与分割,提取图像中的大豆目标。表1列举了各候选植被指数公式。
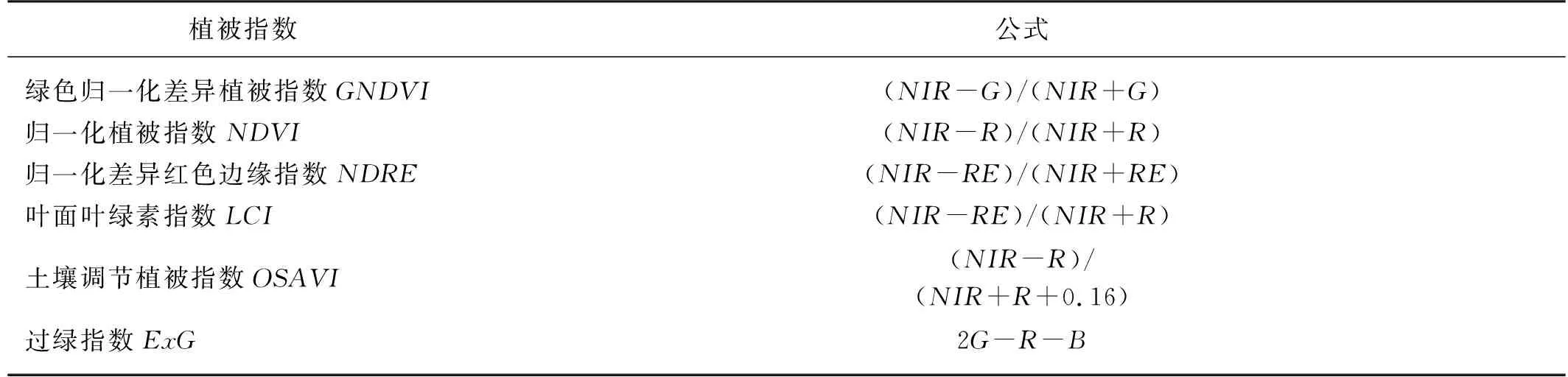
表1 植被指数列表Tab. 1 Vegetation indices list
1.3.2 基于直方图均衡化的大豆目标识别与分割
为避免分别对彩色图像的R、G、B三个分量做直方图均衡化导致结果图像色彩失真的现象发生,将RGB原色空间转换为HSV颜色空间后分别对H、S、V三个分量进行直方图均衡化操作,如图6所示为RGB原色空间与HSV颜色空间转换示意图。

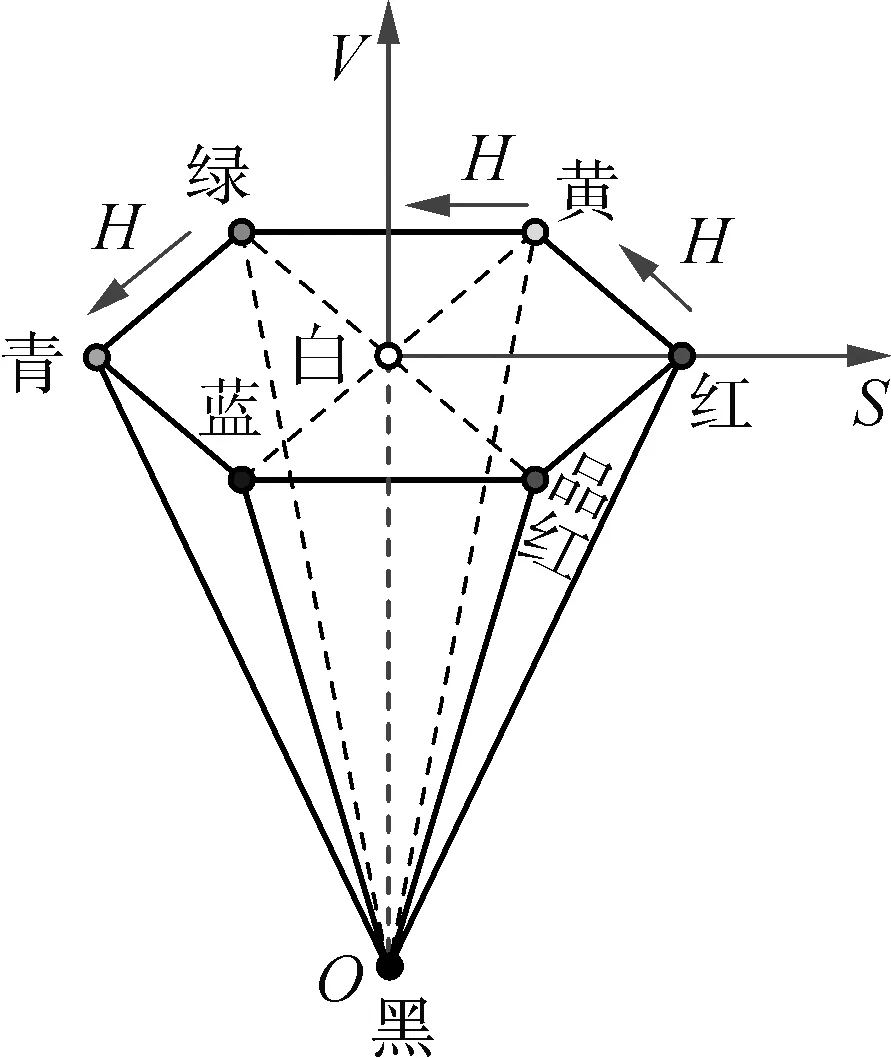
图6 RGB原色空间与HSV颜色空间转换示意图Fig. 6 Schematic diagram of the conversion between RGB primary color space and HSV color space
HSV颜色空间是一种包含色调(Hue)、饱和度(Saturation)、亮度(Value)的视觉颜色模型[13]。其通常用一个圆锥体来表示,圆锥体内部每个点代表一种特定的颜色,角度位置表示颜色的色调,到中轴线的距离表示饱和度,高度表示亮度。RGB转HSV公式如式(1)~式(3)所示。
(1)
(2)
v=max
(3)
1.3.3 基于Otsu阈值算法的大豆目标识别与分割
选取Otsu阈值算法来自动确定阈值,进行大豆目标的分割。Otsu阈值算法即最大类间方差法,是一种自适应的阈值提取方法。这种方法的核心思想是通过一个最佳阈值,使得目标和背景的类间方差最大,不需要人为设定其他参数,是一种自动选择阈值的方法,计算过程简单、稳定[14]。其快速运算、错分概率小的特点,适合于大豆目标的识别和提取,如式(4)、式(5)所示。
gm=w0·g0+w1·g1
(4)
S=w0(g0-gm)2+w1(g1-gm)2
(5)
式中:w0——目标的像元比例;
w1——背景的像元比例;
g0——目标的平均灰度;
g1——背景的平均灰度;
gm——影像总的平均灰度;
S——类间方差。
1.3.4 杂草去除及苗数估算
田地中存在少量的杂草,基于无人机可见光图像进行苗期大豆目标提取时,豆苗和杂草因其相似的颜色特征,很难直接分开,这使得分割后的图像中会存在一些杂草噪声,因此,需要进一步对分割后的图像进行处理,才可用于后续的大豆苗情指标提取。
根据图像的空间分辨率,同时结合图像获取时大豆的生长情况及对真彩色图像的解译结果,选择0.16 cm2为阈值,剔除面积小于此值的大豆目标。该操作主要是对图像中的异常值进行剔除,即对面积过小的大豆目标、杂草进行剔除。
结合图像中豆苗目标大、杂草目标小的特点,尝试采用腐蚀膨胀及开、闭运算等形态学方法继续去除大豆目标中的杂草噪声。腐蚀膨胀即通过一定的结构元与图像进行相应的逻辑运算,如果图像中完全包含腐蚀算子则保留该区域,否则丢弃该区域,这使得图像中目标会向内收缩,丢弃掉小的细节和噪声;而膨胀与此相反,会使目标边界向外扩张,起到放大细节的作用[15]。通过选择合适的结构元进行腐蚀操作去除杂草噪声,再通过膨胀操作放大大豆目标的细节特征,此类操作并不会明显改变物体的原先轮廓,其具体公式如式(6)、式(7)[16]所示。
(f⊖B)(x,y)=min{f(x+i,y+j)-B(i,j)|(x+i,y+j)∈Df(i,j)∈DB}
(6)
(f⊕B)(x,y)=max{f(x-i,y-j)+B(i,j)|(x-i,y-j)∈Df(i,j)∈DB}
(7)
式中:f⊖B——腐蚀;
f⊕B——膨胀;
f(x,y)——输入图像;
B(i,j)——结构元素;
Df——输入元素的定义域;
DB——结构元素的定义域。
通过连通区域分析对大豆苗数进行估算,连通区域分析在图像处理的过程中较为常用,通过对二值图像中的白色像素进行标记,让每个单独的连通区域形成一个被标识的块,进一步的就可以获取这些块儿的轮廓、外接矩形、质心、不变矩等几何参数,自动计算大豆苗数。
2 结果与分析
2.1 大豆目标识别与分割结果分析
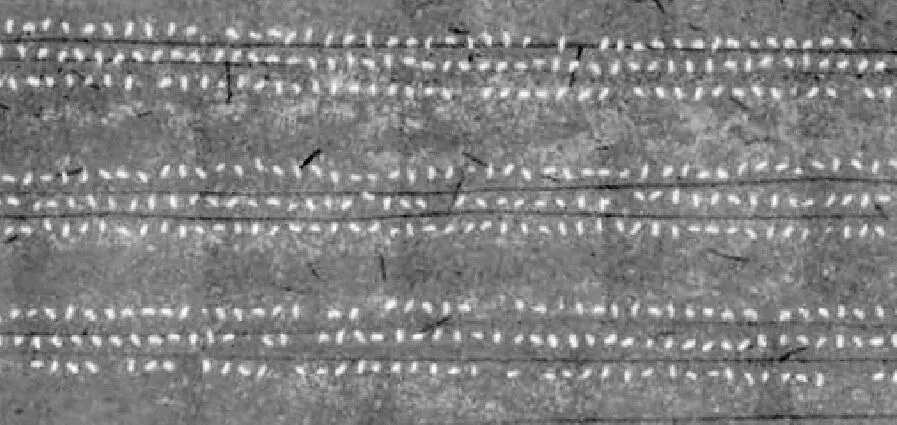
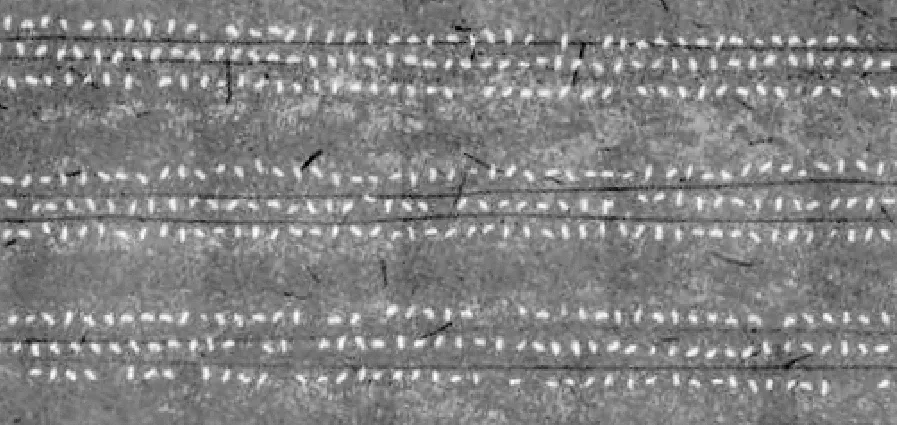
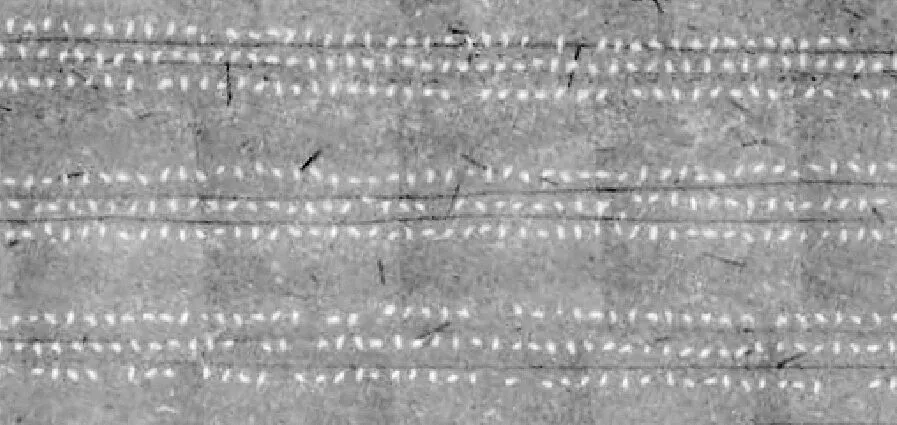
颜色直方图有助于判断、校正和优化图像的亮度和对比度,有助于评估图像的质量,并为进一步处理收集更多信息。对H、S、V分量进行提取并做均衡化处理后的直方图如图7所示。
(a) H分量提取效果
(b) S分量提取效果
(c) V分量提取效果
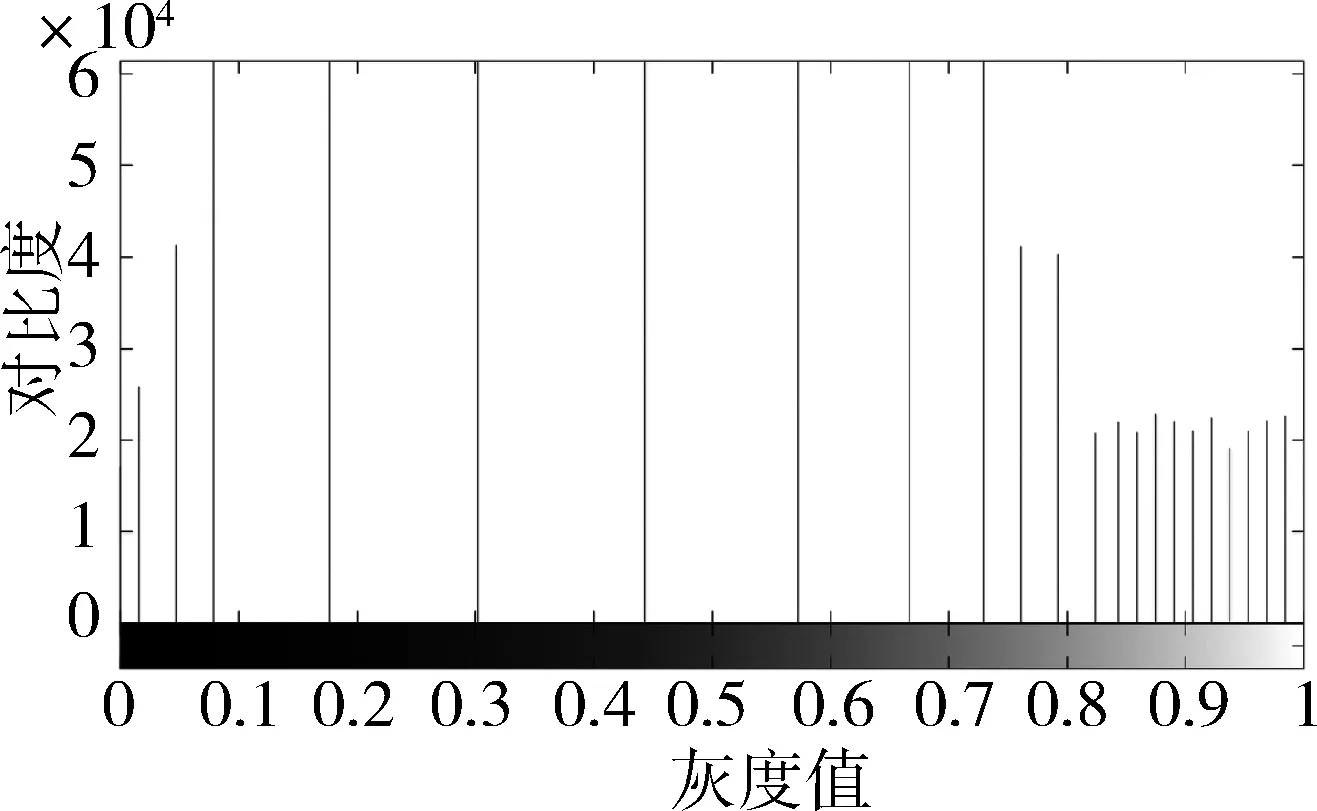
(d) H均衡化后直方图
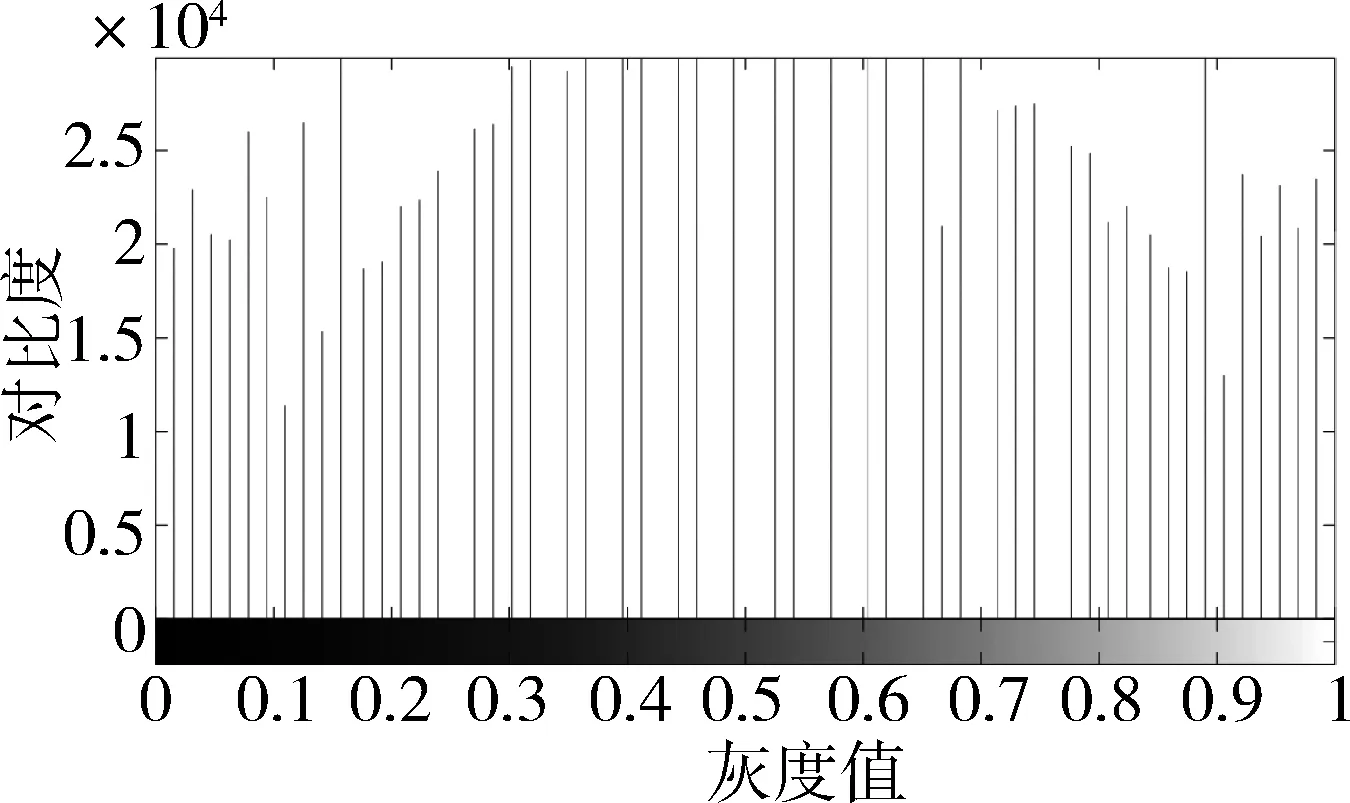
(e) S均衡化后直方图
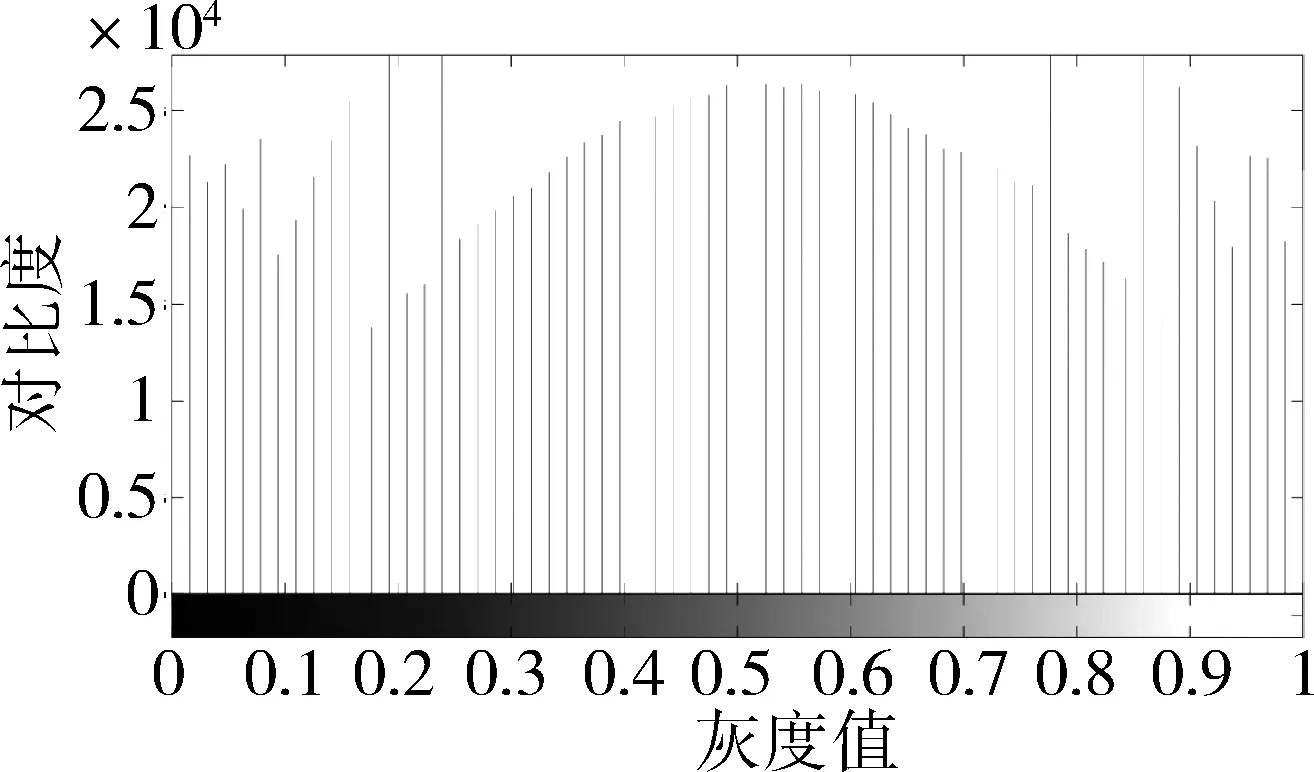
(f) V均衡化后直方图图7 H,S和V分量提取效果及均衡化后直方图结果Fig. 7 Extraction effect of H,S and V components and histogram results after equalization
如图7(d)、图7(e)、图7(f)所示,对直方图均衡化后的图像做了归一化处理,当灰度值=0时,表示黑色;当灰度值=1时,表示白色;当灰度值∈(0,1)时,表示像素灰度在黑白之间变化。
对24个区域图像分别使用不同的植被指数、直方图均衡化、Otsu阈值算法及本文所提出的方法进行分析,选取其中1个区域对大豆目标识别与分割效果如图8所示。
尽管在RGB图像中各部分具备颜色差异,但通过分析GNDVI、LCI、NDRE、NDVI、OSAVI五种指数对图像的分割效果:土壤噪声被完全抑制,大豆目标与杂草因颜色相近,难以区分,滴灌管分割效果显著,但未能完全去除,不利于后续采用形态学算法提取大豆目标;进行直方图均衡化的分割效果显示:大豆目标与土壤、滴灌管之间存在一定的间隔区域,图像直方图变成近似均匀分布,图像对比度显著增强,颜色特征明显,但图像中噪声较多;如图8(g)所示,Otsu阈值算法对大豆目标提取效果明显,冗余噪声较少;基于本文所提出的Otsu阈值算法结合过绿指数的方法对大豆目标的识别与分割效果如图8(h)所示,其提取绿色植物图像效果较好,阴影、滴灌管和土壤噪声等均能较明显的被抑制,植物图像更为突出,分割更为完整。
结果表明,采用Otsu阈值算法结合过绿指数用于大豆目标的识别与分割方法是可行的,且根据此种方法分离绿色作物的可行性已有研究[17]。
(a) GNDVI分割
(b) LCI分割
(c) NDRE分割
(d) NDVI分割
(e) OSAVI分割
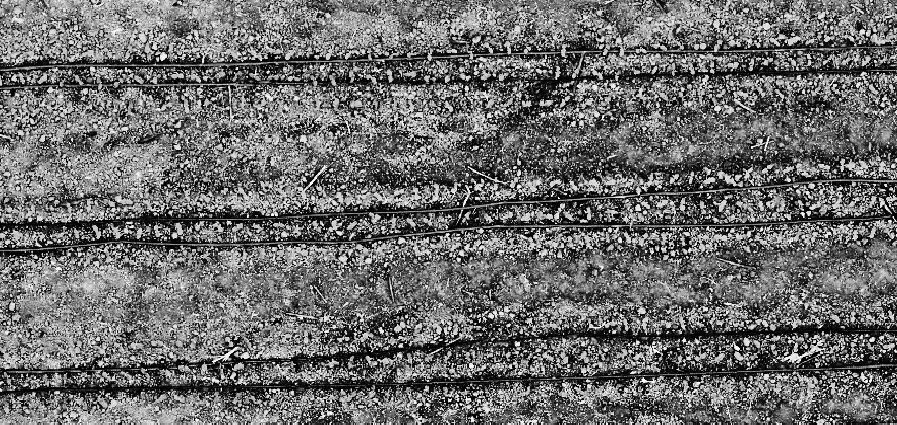
(f) 直方图均衡化
2.2 杂草去除及苗数估算结果分析
根据图像的空间分辨率选择0.16 cm2为阈值,剔除面积小于此值的大豆目标,图9所示为部分区域异常值剔除效果图。
(a) 去杂草前
(b) 去杂草后图9 去杂草效果图Fig. 9 Remove weeds renderings
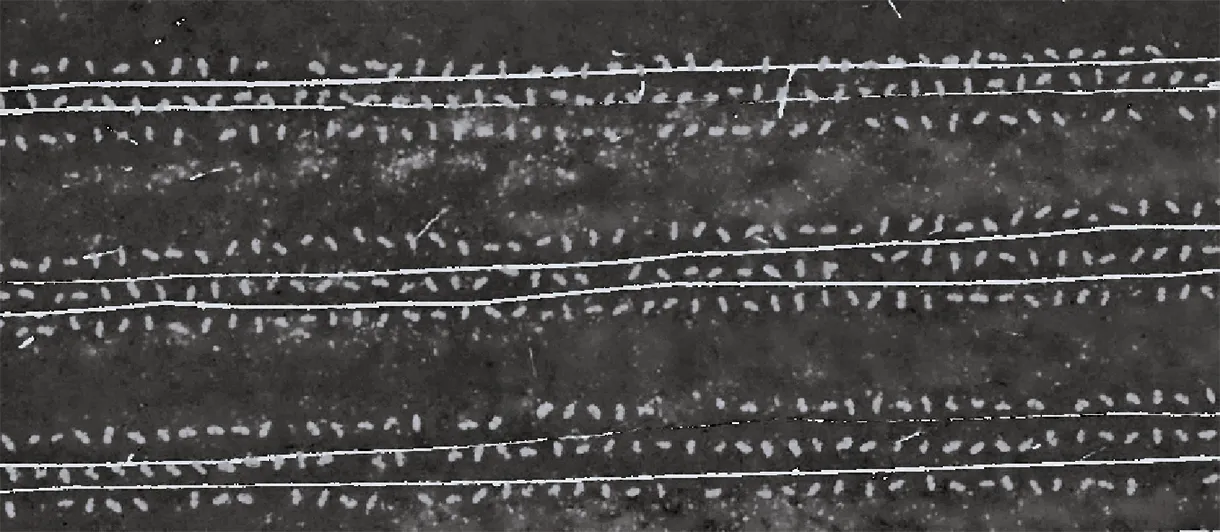
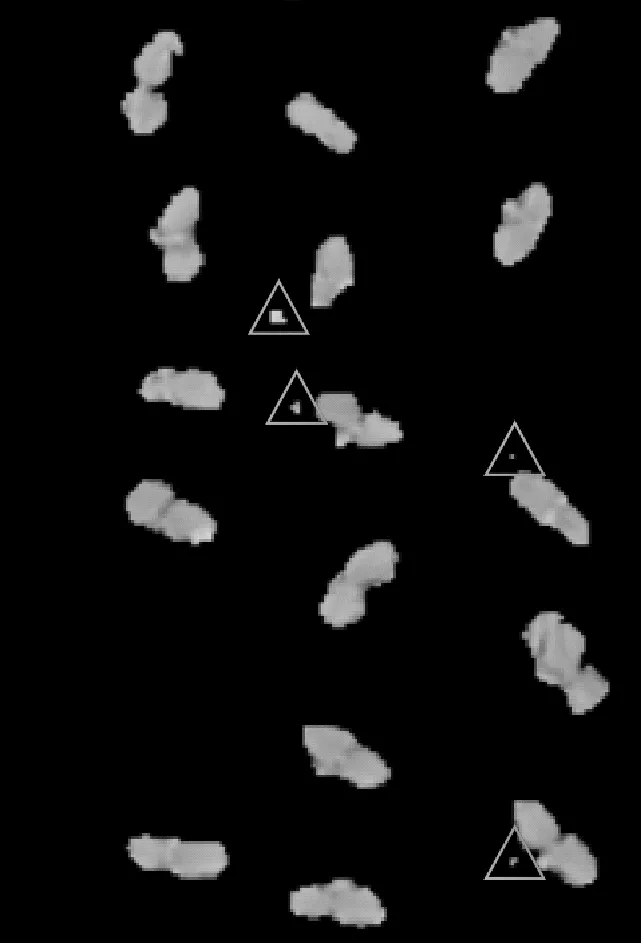
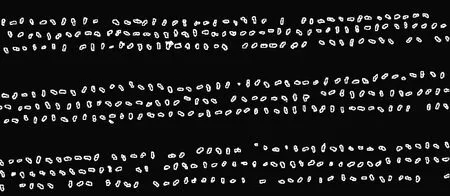
使用Matlab中连通区域标记函数bwlabel,通过一次遍历膨胀图像,并记下每一行(或列)中连续的团(run)和标记的等价对,通过等价对对原来的图像进行重新标记,得到大豆出苗情况。将基于Otsu阈值算法结合过绿指数分割图像转换为二值化图像,通过形态学腐蚀、膨胀操作去除杂草噪声效果及连通区域分析效果如图10所示。
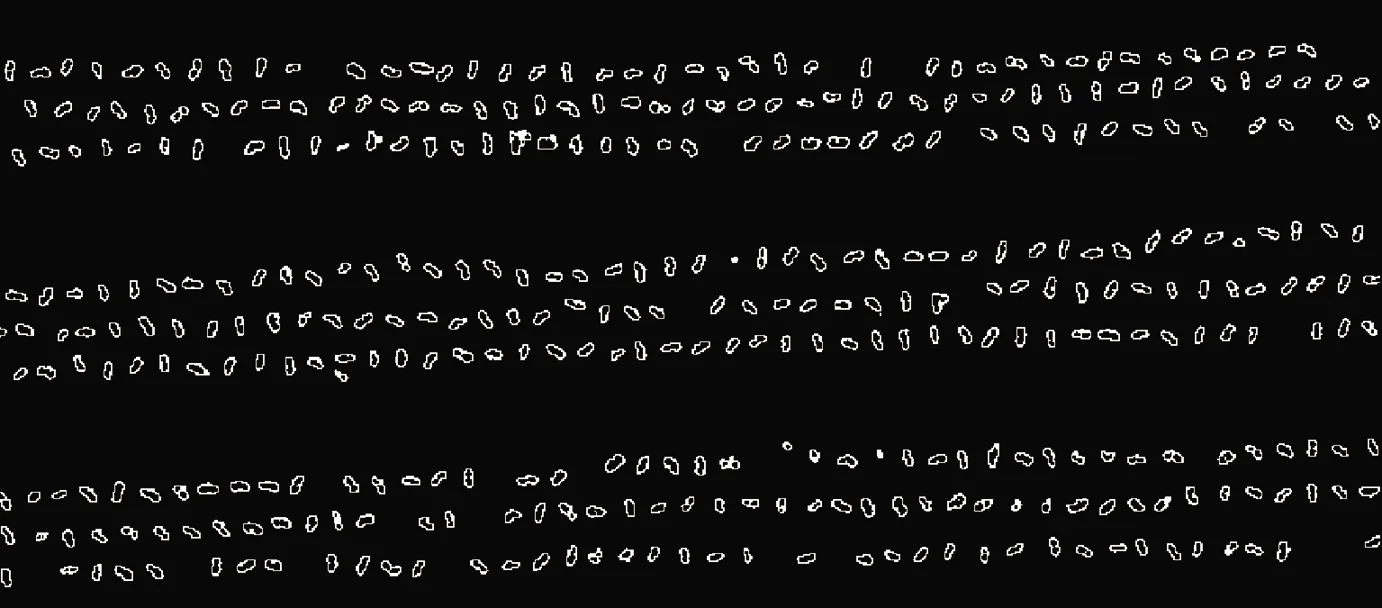
(a) 腐蚀操作
(b) 膨胀操作

(c) 连通区域计算出苗数量图10 形态学操作及连通区域计算结果Fig. 10 Morphological operation and calculation results of connected regions
大豆播种时间为2020年12月1日,播种后5 d左右开始出苗,试验获取的是田间自然生长状态下的图像数据,图像采集时间为2020年12月31日,每2 d获取一次。研究区大豆为一穴一粒的播种方式,每穴有一株幼苗长出即为出苗,在无人机获取大豆田间图像时,人工对区域内大豆进行统计,以获得大豆苗数,根据式(8)出苗统计误差公式计算实测苗数和估算苗数误差,实测苗数和估算苗数试验结果如表2所示。
(8)
式中:W——误差;
R——实际测得的苗数;
A——估算的苗数。
通过计算得出实测苗数与估算苗数的平均误差为0.43%,根据表2所示试验结果,通过Origin 2019b软件构建如图11所示的线性回归模型。由线性回归模型得出R2为0.909 4,线性回归模型拟合度相对较高,能准确地通过无人机遥感技术结合苗数估算方法进行大豆苗数估算。
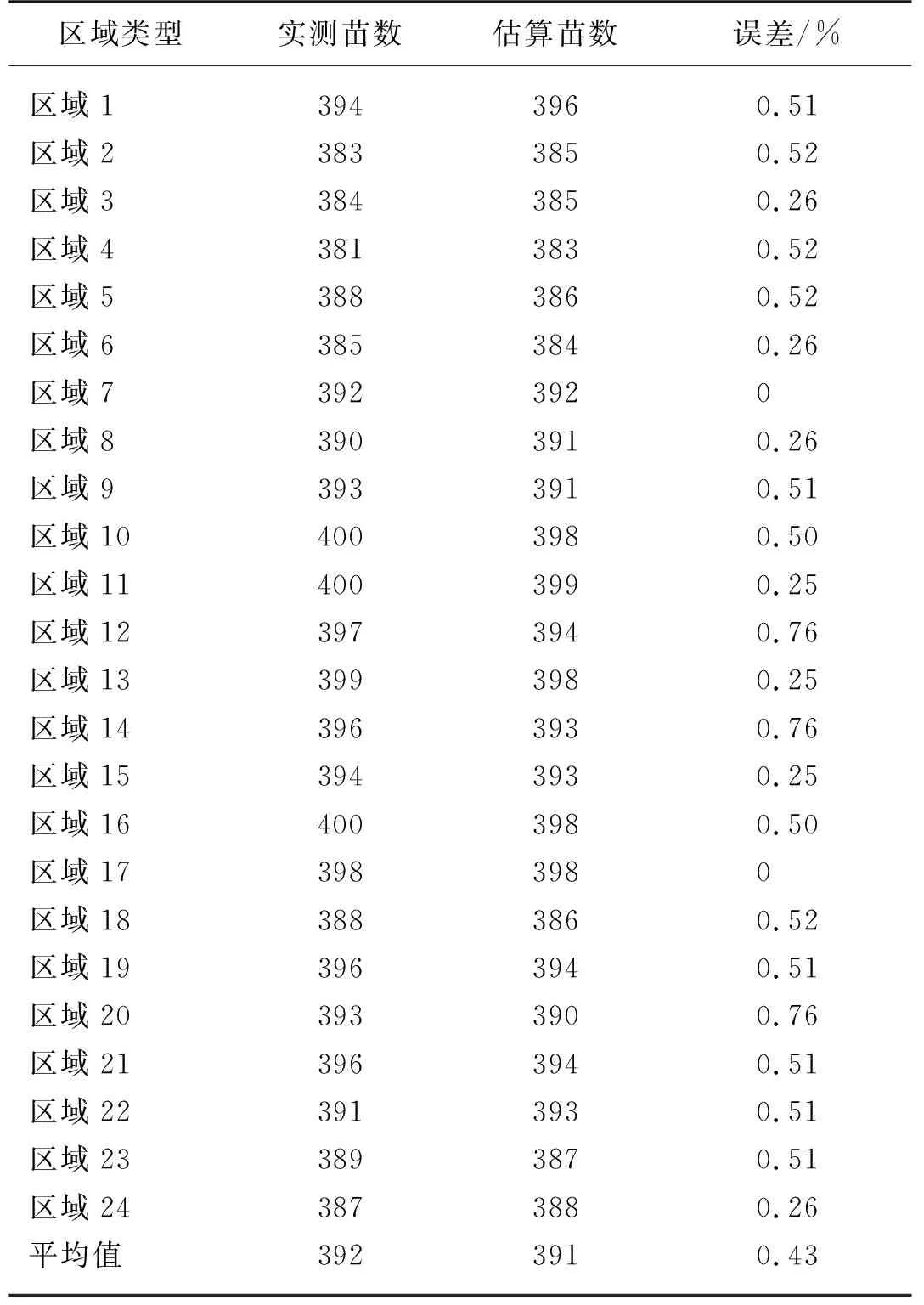
表2 试验结果Tab. 2 Results of experiments
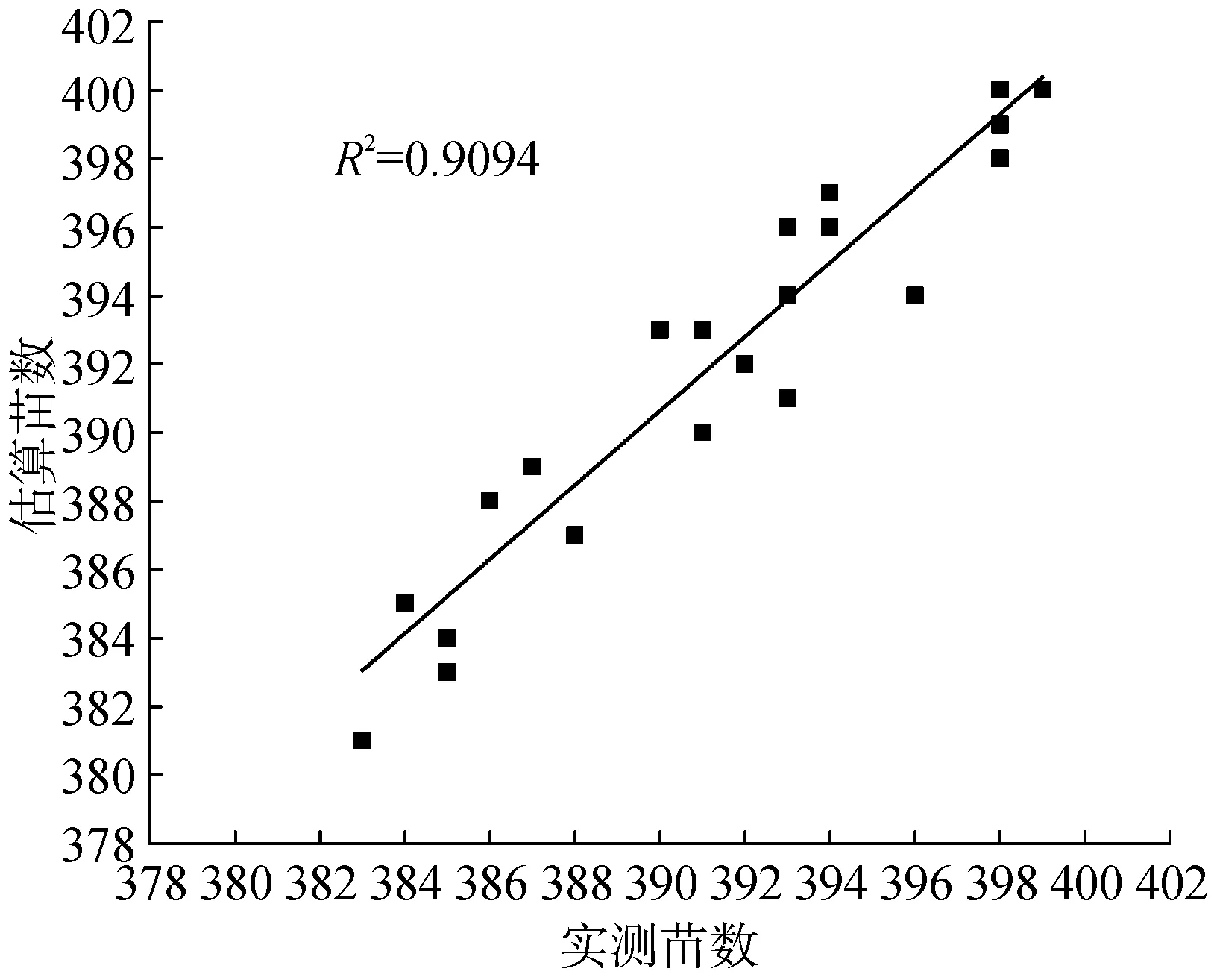
图11 实测苗数与估算苗数的比较Fig. 11 Comparison of measured and estimated seedling numbers
3 结论
以苗期获取的大豆无人机图像为研究对象,最终选择Otsu阈值算法结合过绿指数分割大豆图像,根据空间分辨率剔除图像中异常值,通过形态学腐蚀、膨胀操作去除杂草噪声后采用连通区域分析估算大豆苗数。
1) 使用Otsu阈值算法结合过绿指数分割大豆图像,噪声能较明显的被抑制,豆苗图像更为突出,分割更为完整,形态学操作降低了杂草带来的影响,提高了识别精度。
2) 基于无人机遥感技术的估算苗数与田间实测苗数建立的线性回归模型中,相关系数R2为0.909 4,由出苗统计误差公式计算的平均误差为0.43%,提出的苗数估算方法误差较低,能够快速准确识别大豆苗数。
3) 研究可快速评估大豆最终田间出苗,为田间大豆出苗率的测定提供了有力的支持,为后续对播种效果和质量评估工作奠定了基础,为农业生产者进行田间管理提供参考决策意见。