基于Walabot的墙体管道分布扫描设计
2022-04-22林诗捷赵炎莫菲万威万永菁王嵘
林诗捷,赵炎,莫菲,万威,万永菁,王嵘
(华东理工大学 信息科学与工程学院,上海,200237)
0 引言
目前我国的居民住宅和商品房屋,其墙内电线管道分布的设计主要都为“隐线”设计[1,2],即管线埋在墙体内部的结构,在没有丰富的二次装修经验的情况下,比较难以判断墙体内部线路走向[3],目前国内外存在多种多样的墙体扫视仪,但大都存在仍需手动扫描和无法完整显示墙内线路走线的问题。Walabot是由Vayyar Imaging公司开发的一种基于三维射频的传感器。相比于市面上的其他墙体扫视仪,Walabot具有实时墙内成像的特点,这也有利于用户更快了解墙体内部情况。因此本文利用Walabot Creator Pack作为开源设备允许开发使用的特性,通过处理拼接Walabot扫描墙体获得的原始图像二次开发。本文提出的基于Walabot的墙体管道分布扫描设计能够弥补Walabot局部成像的不足,本文使用基于线性多通道的图像混合方法图像拼接,对图像的RGB三通道信息进行混合叠加处理,绘制管线分布图,实现墙内全局成像。
1 基于Walabot的管道扫描关键技术
1.1 Walabot的成像原理
Walabot利用射频技术穿过设备前的障碍来观察物体,使用线性极化宽带天线阵列来传输、接收和记录信号来重建环境图像。Walabot扫描通信示意图如图1所示,由VYYR2401 A3系统片上集成电路产生和记录信号,数据图像通过USB接口与主机设备通信,主机设备可以是计算机、智能手机,从而将扫描结果实时反馈。

图1 基于RIS的算法流程示意图
如表1所示,Walabot可以为应用提供多种类型的图像数据,对比Walabote得到的五种原始数据,RI反馈得到的是本实验不适用的三维图像数据;IE反馈得到的是最强点的能量信号,无法获得管道空间位置信息;虽然IT反馈的空间位置以及目标强度数据与本实验相关,但其本身的数据波动较大,测量误差比较明显;RS是天线反馈的反射脉冲,故不适用于本实验;而RIS则能够直观的反映出墙体内管道的宽度以及空间位置信息,故本实验采取RIS作为Walabot的数据输出。
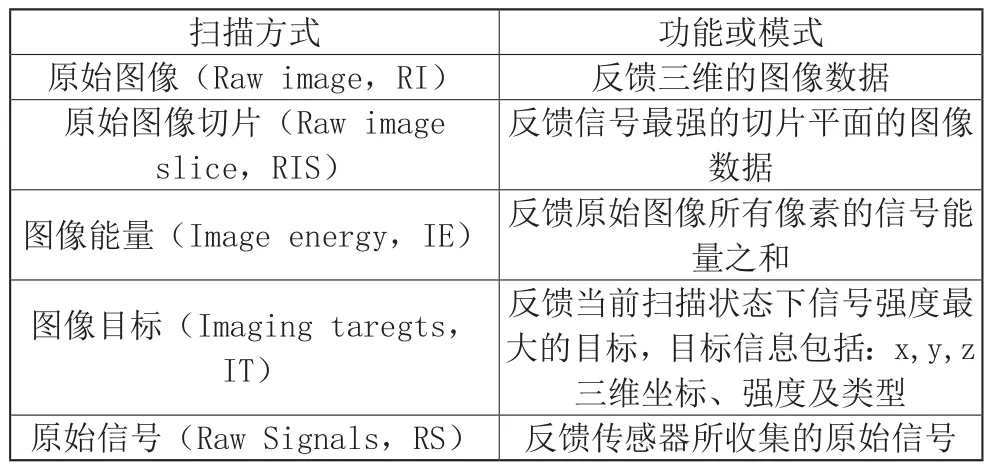
表1 Walabot的不同扫描模式表
1.2 基于RIS的墙体管道分布的实验流程
由于墙体内部管线类型大多为PVC、金属材质,墙体埋管厚度大致为3-5厘米,因此本文采用RIS图像反馈形式进行图像处理,算法实现流程如图1所示。
对于两张图像的多通道图像混合,首先分组提取图像中每个像素点对应的像素值,再将像素点的RGB通道的颜色值转化为整型值,以其中一张图像为基准,将第二张图像向右平移三个像素点,对相邻两张图像的重叠部分的三通道数值进行叠加求平均,最后将叠加后的像素值再恢复成图像即可得到经图像混合后的拼接图像。
而对于一组图像的多通道图像混合,则是先对前两张图像进行图像混合操作,再按照扫描顺序依次将组内图像向右平移三个像素点(平移三个像素点对应实验中Walabot移动1cm的情况)。对相邻两张图像的重叠部分的三通道数值进行叠加求平均,最后实现一组图像集的拼接操作。如图2所示为单列RIS图像拼接前后的对比图。

图2 单列RIS图像拼接前后对比图
本实验所用的基于线性多通道的图像混合算法是通过对图像RGB通道的数值进行叠加变换来实现图像拼接的。由于是整个图像集的混合操作,因此需要先将图像集按列分组,如图2(a),每组图像混合拼接,之后再对所有组图像混合。
1.3 线性拟合管道中心强度图
由于本实验采取两种扫描方向对实验墙体进行扫描,为了研究两种扫描方式对于探测管道中心强度的准确性,因此本实验先分别对两种扫描拼接图拟合管道中心方程,再对比不同扫描图的方程的拟合程度。首先是将拼接图转化为HSV颜色模式处理,确定管道中心探测强度最强点的HSV范围,由于管道中心强度颜色为红色,因此这里HSV范围设置为[0,43,125]~[10,255,230], 将这个范围以外的像素点过滤设置为黑色,强度中心颜色设置为白色,如图3所示。

图3 横向扫描部分管道中心强度图
为了对比分析几种线性回归方法的拟合效果的优劣,本文选取最小二乘法、梯度下降法、神经网络线性回归三种线性拟合方法,分别对扫描的墙体管道强度图进行拟合。
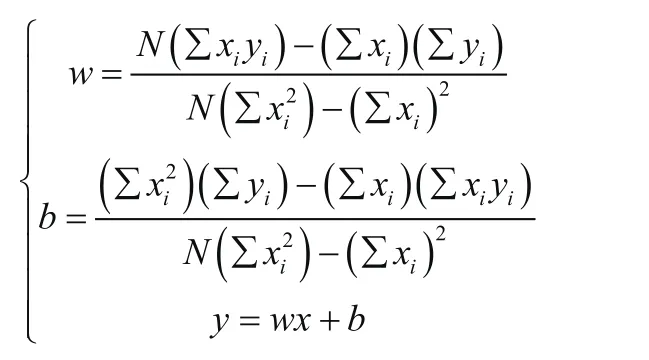
1.3.1 最小二乘法
最小二乘法是通过最小化真实值和预测值的残差平方和来寻找数据的最佳函数匹配。其公式为:
1.3.2 梯度下降法
梯度下降法与最小二乘法的区别在于,最小二乘法是从损失函数求导,直接求得数学解析解,而梯度下降法是利用导数传递误差,再通过迭代方式逐渐逼近真实解。求解直线方程y=Θ0x+Θ1,需定义一个均方误差损失函数:

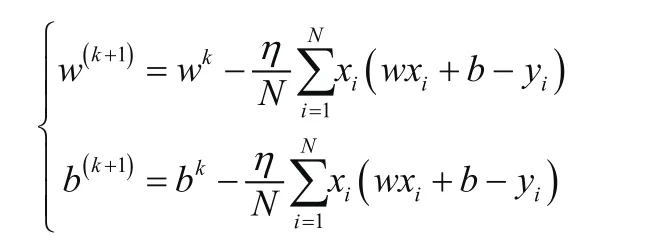
其中η为学习率,用来缓和每一步调整全值的程度。本文设置的η为0.0001。
1.3.3 线性回归神经网络
本文基于Keras的Sequential模型构建单入单出的线性回归神经网络,神经元激活函数选用线性函数,采用Adam优化器和MSE均分误差损失函数进行模型训练,网络输入为,输出为,训练完成后,网络中的权重w和偏置值b为待求的拟合管道中心线的参数结果。
2 基于Walabot的管道扫描实验
2.1 实验环境搭建
本文选用石膏板和金属管模拟墙面和墙内电线,采用非金属材料架高石膏板,设定石膏板和桌面之间的距离大于10厘米,两边的非金属材料与测量区域之间的距离大于20厘米,确保其不会干扰Walabot的扫描。本实验所用金属管道直径为3厘米。实验环境如图4(a)所示。
搭建好实验环境后,在石膏板上绘制1cm*1cm的网格建立坐标系。绘制于石膏板上的坐标系如图3-1(b)所示。本实验设置扫描区域左下角的端点为(0,0),选用1cm的采样间隔对管道进行采样,设置Walabot以横向和纵向的方式分别进行区域扫描,在同一坐标系下沿着制定的网格呈“S”形扫描,以此确定管道的走向和具体位置。图4(b)中黑色实线为Walabot横向扫描和纵向扫描的轨迹路线。扫描区域的长和宽分别为SW和SH,Walabot的长和宽分别为WW和WH。实验设置Walabot横向扫描时的锚点以及形态如图4虚线框的Walabot所示,纵向扫描时的锚点以及形态如图4(b)灰色形状的Walabot所示。
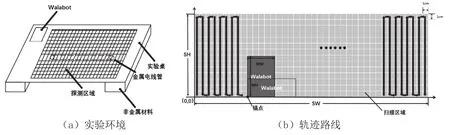
图4 Waalbot实验环境示意图
2.2 基于RIS的墙体管道分布的结果分析
图5为 Walabot两种扫描方式得到的扫描图以及拟合管道中心强度图,其中(a)(c)为横向扫描获得的扫描图及强度图,(b)(d)为纵向扫描获得的扫描图及强度图。由图5分析可得,Walabot在横向扫描时的探测精度不够好,容易受到外界干扰,其结果图下侧存在大量干扰信号,成像质量较低,经分析是由于人为因素干扰:Walabot在检测过程中信号探测到人体产生干扰;而其在纵向扫描时检测效果良好,没有过多的干扰信号,相对于横向扫描,纵向扫描的检测精度更高,模拟管道尺寸与实际更为贴近。
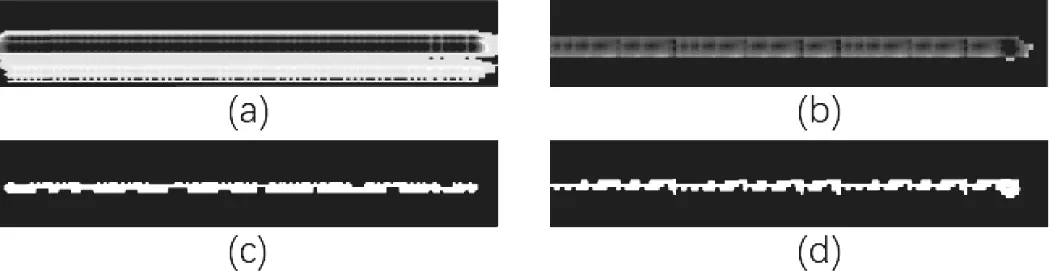
图5 Walabot两种扫描方式得到的扫描图以及拟合管道中心强度图
图6为两种扫描方式三种线性回归方法拟合的直线方程的对比。本实验所用的管道实际位置对应于图6中y=100的位置,在线性回归神经网络的线性拟合实验中设置的迭代次数为10000。表2为三种线性回归方法拟合的管道中心直线的详细参数对比,六条直线方程位置均与y=100较为接近,其中参数w拟合效果最好的是用线性回归神经网络拟合纵向扫描管道中心直线,参数b拟合效果最好的是用梯度下降法拟合纵向扫描管道中心直线。
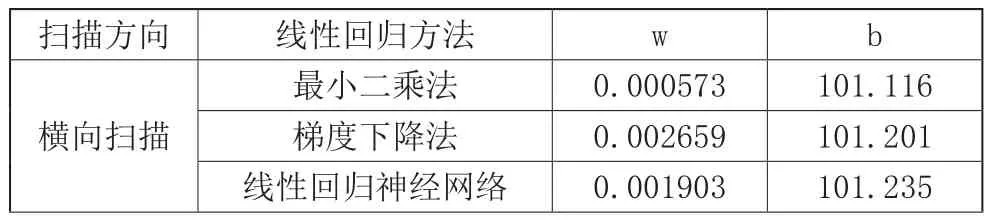
表2 三种线性回归方法拟合的管道中心直线参数对比

纵向扫描最小二乘法 -0.0 0 1 5 9 8 1 0 0.9 4 7梯度下降法 0.0 0 0 8 0 0 1 0 0.6 9 8线性回归神经网络 -0.0 0 0 1 9 4 1 0 0.7 4 3

图6 三种线性回归方法拟合管道中心直线方程对比图
参考图6所示,三种拟合方法中纵向扫描模拟管道中心方程均比横向扫描模拟管道中心方程更靠近y=100,说明纵向扫描的精确度更高,探测到的管道位置更接近实际管道位置。而两种扫描方式拟合管道直线与实际管道位置偏离程度最大均不超过2像素点,说明本实验所用的两种扫描方法均能准确探测到墙内管道实际位置,通过三种线性回归方法拟合出来的管道强度中心位置都与实际管道基本一致,纵向扫描的精确相对较高。
3 总结与展望
本文研究了基于Walabot的墙体管道全局分布,基本实现墙体管道全局分布的情况。在基于RIS的墙体管道全局分布实验中,本文采用了基于线性多通道的图像混合技术对RIS图像进行处理,并综合考虑横向扫描以及纵向扫描,三种线性回归方法的对比研究说明本实验所用的两种扫描方式均能准确反映墙体管道中心强度。后续工作中,将考虑对不同材质、不同粗细的管道进行检测并分类,研究探索不同材质管道实验数据的差异,实现Walabot对不同材质的管道检测分布成像。
