城市公共自行车智能需求预测及调度管理系统
2022-04-22丁一丹张福鼎
丁一丹,张福鼎
(江苏第二师范学院 物理与电子工程学院,江苏南京,210013)
0 引言
第一代公共自行车于1965年在荷兰诞生,但由于技术和管理上的缺陷,他们没有取得令人满意的结果。30年后在丹麦人在其首都建立了第二代公共自行车系统。第三代公共自行车系统在21世纪发展起来,以数字智能管理业务为主要特点。2005年,北京出现了由家庭经营的自行车租赁服务。后来,受到国外第三代公共自行车系统的成功案例的影响和政府对低碳环保出行方式的大力倡导,公共自行车开始真正驶入人们的社会生活中[1-2]。2008年,杭州成功地将公共自行车引入城市公共交通系统.杭州 PBS 的运营成功促进了国内其他城市的公共自行车项目的建设,2009年,国内一线城市相继建设了PBS系统并投入运营。目前,国内公共自行车系统的建设和运营开始进入一个高速发展的时期。半个世纪以来国内外学者就其系统特点、租赁系统设计、发展模式、交通适应性、使用安全性等一系列问题进行了理论和实践的探索和研究[3-4]。同时研究人员开始关注公共自行车系统的利用效率和服务能力问题,站点服务水平、自行车数量均衡分布等智能调度相关问题开始引起越来越多人的重视。
GPS在地面技术发展中的应用涉猎多个领域,例如不同车辆的交通管制;应急车辆快速通行;地面沉降检测与预测;地球地理资源勘测;地面沉降检测与预测;测量板块内部运动状态和地壳变形;陆地和海洋大地测量学的测定[5]。GPS技术在海上起着极其重要的作用,例如确定最佳海上线路;实时监测船队航线动态,确保海上运行的安全,便于及时调整海上路线;GPS线路导航;海上救助作业;公海渔船的科学研究和作业管理;确定海上油气平台的位置和故障;准确识别沉船位置;水下管道安装调查;沿海地区的地球物理开发;折旧水文测量网;检测定位海洋垃圾随洋流动向;海底地形勘测;海上定位便于海上交警执法;港口监测便于运营管理。GPS在航空上的主要应用于民航的定位导航。飞机准确地降落。确保燃料管理模式的安全性。导航测量和定位测量;确认物理勘查灾区的飞机尺寸和校对;遥感飞机飞行状态。GPS技术在航空航天领域也发挥着重要作用,实时测量低轨卫星的轨道,实时测量卫星的进入和回收,了解铁路船舶的安全性,利用GPS确定目标的大气尺度和参数;七维参数的卫星地面测量。
因此,GPS技术被推广到多个地区,但为了实现这些目标,GPS信号的接收和调制装置显得尤为重要。它的主要功能是在这个位置设置宽度和UTC时间,全球有很多GPS手机产品接收模块,为人们的生活提供便利。
1 公共自行车定位系统设计
本论文所设计的系统整体框架如图1所示,主要包含数据采集模块、需求分析模块、预测算法模块、历史分析模块、智能调度模块、安全保障模块及智能供电模块。其中,数据采集模块是用于将当前锁定区域或指定范围内的实时数据进行收集,上传到云端服务器;需求分析模块是根据历史数据状态及当时实时要求进行策略制定;预测算法模块是基于需求分析模块进行算法实时调整,或者从备选数据库中选择最优解,或者基于人工智能进行自我学习;历史分析模块是用于将大数据所存储的时刻、人流量、需求、交通状况等数据进行多元处理,用于改进预测算法及调度算法;智能调度模块是联合预测算法模块进行车辆调度,达到满足车辆使用要求;安全保障模块可以实现卫星定位、远程开锁以及后台传输数据等功能;智能供电模块目前利用太阳能光伏发电,在共享单车车篮底部安装太阳能电池板,对系统进行供电。

图1 系统整体框架
硬件模型框架如图2所示,以主控核心单片机、定位、摄像头、LCD显示、无线通信、晶振和复位这几部分构成。定位由WiFi定位、WLAN定位和GPS定位多重定位共享单车的踪迹,定位每一辆共享单车实际的位置;摄像头统计经过租车点区域50米范围内的人流量;LCD实时显示租车点使用共享单车的量数以及摄像头所统计的人数;无线通信用于每个租车点之间数据进行实时交互,及与总控制中心进行数据实时传输,完成共享单车的智能调度;晶振器通过结合一个单片机内部的控制电路,产生一个单片机所需要的时钟信号;复位方式让单片机在上电的过程中保持一个正常的复位运行状态,避免在上电这个不稳定的过程中对执行器件产生错误动作甚至破坏电路。最终实现共享单车短时需求预测与智能调度,硬件上必须有相应的模块,同时需要单片机联合各个模块实现功能。
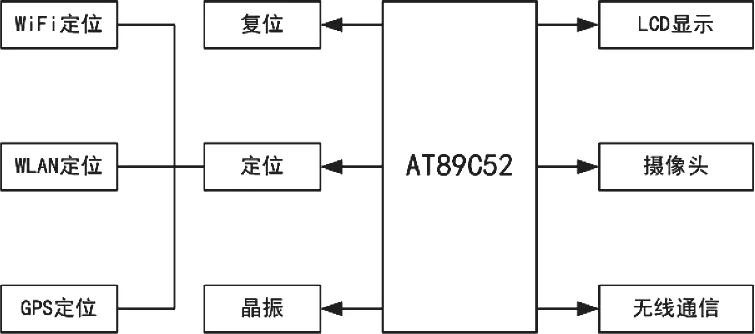
图2 硬件模型
算法流程如图3所示,本文对共享单车短时需求预测及智能调度问题进行研究,通过对人口分布图数据和热力图数据进行分析,不同时段人群流量曲线以及热力图数据进行样本处理,比如在热力图中人多的区域显示红色,人少的区域显示蓝色,然后按比例进行数据量化,在人口数量多的地方配备相对数量多的共享单车。可以分为规律状况和特殊状况,规律状况下,即日常上下班,根据定位模块通过WiFi、WLAN和GPS等功能实现多重精准定位,得到不同时间段使用共享单车的数量,再基于摄像头模块,利用人脸识别技术实时记录某个区域半径50米以内的人流量,计算出使用共享单车的人数占经过这个区域人流量的比例,即得到短时需求预测量;特殊状况下,要进行异常预测,例如某地开展大型活动时,也可以根据活动参与人数,实时预测出使用共享单车的需求量。根据需求预测量,联合分析历史数据,比较需求量与供应量之间的关系,不同的关系进行不同的智能调度方式,减少成本的同时满足用户的出行需求。
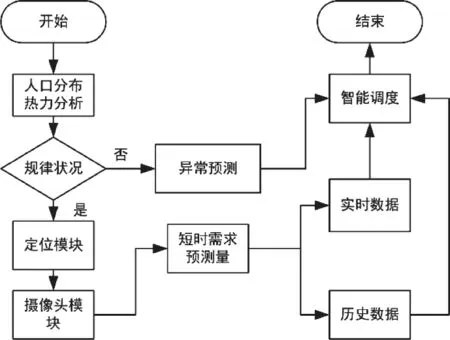
图3 流程图
本设计是为位置信息功能提供微机控制的GPS装置,数据输出模块使用MCS-51串扰接收GPS信号sirpstar II,从软件中选择有用的位置数据通过单个处理器的并行接口将最终输出连接到LCD。GPS接收机模块是接收机的重要部分,具有不同类型和功能,总体结构主要包括低噪声转换器、并行信号、处理器、存储器等。GPS接收模块使用天线接收卫星信号,并通过一系列频率转换、放大和滤波在天线视场内跟踪、定位、测量卫星,接收卫星位置,计算信号扩展时间,然后计算卫星天线的状态。
GPS定位信息系统的硬件分为以下四个部分:
(1)接收电路:外接GPS接收模块;
(2)控制电路:STC89C52单片机对GPS模块的数据读取和传输;
(3)显示电路:LCD1602液晶显示器;
(4)开关元件:系统运行所需的电源。
单片机系统:本系统采用微处理器STC51单片机,单片机对于外接GPS模块的数据的接受和读取并且传输到显示模块,接收模块接收到相应的数据,处理并发送到lcd1602模块。
外围电路:部分外围电路包含lcd602液晶显示器、电源电路、辅助电路以及外部信号接收模块。GPS接收机模块sirfstarii主要包括变频器和信号传输通道。对天线接收到的卫星信号进行变频、放大等处理,对频率进行滤波、相关固定和测量。
宏处理器控制程序:进行程序设计、程序初始化、宏处理器控制系统、GPS控制装置,完成数据采集、处理相应信号、生成所需数据并通过宏处理器接口插入LCD模块:GPS接收模块将外部接收模块接收到的卫星导航信息进行调制解调,将译码后的信号并发送给芯片。通过集成的面板内容识别程序显示在显示模块中,最后在LCD1602液晶显示器上显示地理位置坐标。
GPS方案的核心是单片机与信号接收模块之间的信号传输与接受。单片机对外部信号的调制解调编码译码,并将译码后的信号发送到显示模块在液晶显示器上进行显示。在本软件的开发中,软件模块设计为LCD模块初始化模块、GPS数据记录模块和三个主模块作为单片机模块。
软件调试是利用Proteus软件进行模拟调试,用于检验程序和硬件的调试。硬件按照详细设计中的设计连接好总体的系统电路图,将软件仿真生成的HEX文件下载到单片机并运行仿真。根据设想在Proteus中绘制好电路图,写入程序,观察接口是否正常,程序是否能正常运行,观察显示模块是否运行,显示屏上是否显示数据,检验程序是否正常,硬件是否配适。确认仿真是否无误,仿真无误之后再下一步在Altium designer上绘制工程图。
2 总结与展望
本研究所做工作首先分析人口分布图数据和热力图数据,根据人口数量按比例分配预测共享单车需求量;然后基于单片机的数据采集模块、定位模块和需求预测模块等模块进行共享单车短时需求预测;在需求预测模块之上对共享单车进行智能调度,根据需求量与供应量之间的不同关系进行不同的智能调度,实现在减少运营成本的同时满足用户使用共享单车的需求。
后续可改进之处共享单车系统短时需求预测与智能调度问题是一个复杂的动态共享单车问题,预测不准确受到很多影响因素的控制,导致智能调度也存在误差。本文虽然研究了一些相关工作,但是由于实验时间、论文理论化等一些原因,还存在以下不足,提出未来升级框架及改进方法:共享单车租车点需求量的预测值存在不准确,存在一些误差的情况,需要多次实验,比较实际结果与预测结果,将得到的结果进行计算分析得出误差,然后积极修订;共享单车智能调度的建立过程中,对共享单车调度划分条件设定不够精细,没能达到全面的智能调度,还需要根据租还车点的实际情况进行分类研究;一些客观存在的因素也影响预测的准确性,例如天气、时间段等一系列造成预测不准确的因素,还需要进一步考察分析。
