无人机倾斜摄影技术在城市三维建模中的应用
2022-04-21秦少林田振东李艳贵杜新红
秦少林 田振东 李艳贵 杜新红
(1.辉县市春诚测绘有限公司,河南 辉县 453600;2.辉县自然资源和规划局,河南 辉县 453600)
1 引言
城市三维模型是数字城市最重要的基础框架数据,是城市数字化的重要基础,是城市各项数据的基础载体[1,2]。随着城市管理和地理信息服务对空间精密性、动态可视性需求的增强,数字三维城市已成为城市管理的重要手段。传统三维建模方法通过人工拍照获取建筑物的结构和纹理,结合航空正射影像、平面矢量图、建筑物顶部矢量图等数据建立白模,通过照片纹理分析模型的细部结构,最终将处理后的纹理信息赋予相应的白模上。无人机倾斜摄影技术颠覆了传统测绘的作业方式,能全面感知复杂场景,并以高清晰、高精度方式来呈现[3]。通过高效率的摄影采集设备和高精度的数据处理方式,能以真实效果和测绘级精度反映研究对象的外观特征、高度及位置等信息。以郑州市某小区城市三维建模为例,基于无人机航空摄影测量技术,采用Smart3D 专业处理软件,通过影像获取与处理、联合区域网平差、多视影像密集匹配及纹理映射等关键技术,快速构建实验区实景三维模型。
2 倾斜摄影测量系统
2.1 倾斜摄影系统
倾斜摄影系统由飞行平台、工作人员和仪器组成。其中飞行平台为无人机,工作人员为地面指挥人员,仪器包括传感器和姿态定位系统。传感器主要是多头相机(用于多角度拍摄)和GNSS 定位装置(用于获取三个线元素XS,YS,ZS),姿态定位系统主要记录相机在曝光瞬间时的姿态(三个角元素φ、ω、κ)。
2.2 倾斜摄影三维建模关键技术
倾斜摄影测量技术数据处理流程包括影像预处理、多视影像联合平差、多视影像密集匹配、高精度DSM自动提取及城市三维建模等[4],如图1 所示。
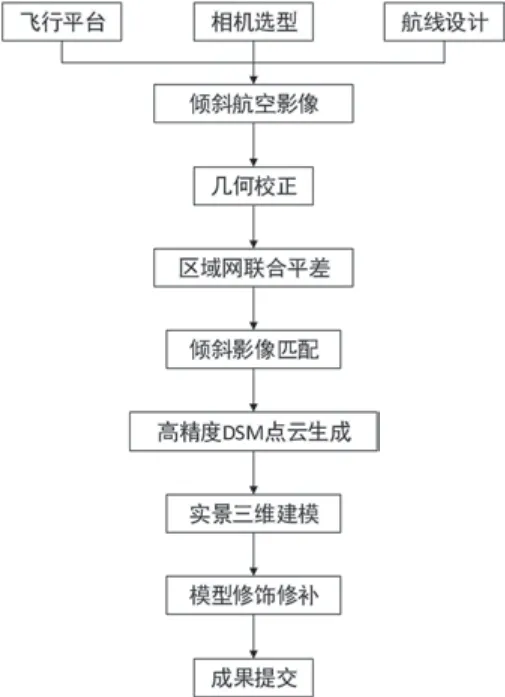
图1 倾斜摄影三维建模流程
3 研究区域
3.1 实验区概述
研究区域位于郑州市某居民小区,小区面积约为0.2 平方公里,配套设施齐全,建筑物规划合理,绿地率高,有利于城市居民小区三维一体化模型构建研究。实验区范围如图2 所示。

图2 实验区范围
3.2 数据获取及模型建立
利用低空遥感技术快速获取实验区数据,利用ContetxtCapture Master 建立真三维城市模型,技术流程如图3 所示。①分析和预处理数据资料,确保建模数据完整。②将倾斜影像进行空中三角测量,获得所有影像的高精度外方位元素;通过多视影像密集匹配,获得高密度三维点云,建立城市3DTIN 模型。③根据3DTIN 每个三角形面片的法线方程与二维图像间的夹角挑选最佳纹理信息,并实现纹理的自动关联;④输出并获得城市真三维模型成果[5]。

图3 三维模型构建技术流程
(1)数据获取。研究区数据获取设备采用飞马智能航测系统D200,倾斜模块为D-OP300,相机数量:5;有效像素:2400 万×5;传感器尺寸:23.5×15.6mm;镜头焦距:中间25mm,四周四个相机35mm;相机倾斜角度:45°。根据既定方案进行资料收集、实地踏勘、航线设计、空域申请、航摄设备安装调试、基准站建立、控制点布设等一系列准备工作。设计航线东西向飞行,航向重叠度≥70%,旁向重叠度≥60%,共获取面积约0.3km2地面分辨率大小为5cm 的倾斜影像。实验区倾斜影像如图4 所示。
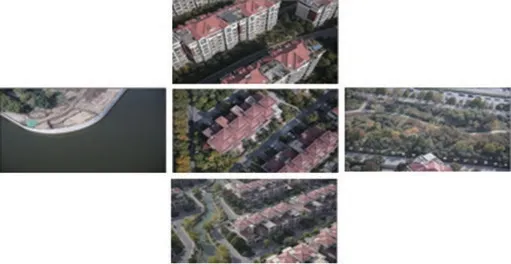
图4 倾斜五镜头影像数据
(2)数据预处理。无人机影像数据预处理包括POS 数据与航带整理、像片旋转、匀光匀色、畸变改正[6]。首先采用布尔莎七参数模型,将测区影像数据的曝光点原始坐标WGS84 椭球下的地理坐标经纬度和大地高转换为2000 国家大地坐标系和1985 国家高程基准或者自定义投影坐标。其次整理无人机航带和确定航向,通过恢复像片拍照时的方向,保证像片拼接和重叠,同时对影像进行匀光匀色处理。最后通过正解和反解确定原始影像与纠正影像间的几何关系,运用灰度插值法实现图像的改正[7],纠正后像主点的位置及像幅大小都出现了轻微变化,如图5 所示。

图5 倾斜五镜头影像畸变改正
(3)空三加密。空三加密是无人机影像处理的关键,也是处理流程的难点。打开ContetxtCapture Master软件,建立工程,导入影像、POS 数据、控制点,设置相机焦距。POS 辅助下影像间通过同名像点匹配,自动构建像点自由网,并进行自由网平差和相机参数的自由网优化。最后进行地面控制点的自动预测和手动量测,联合地面控制点自动平差及空三平差结果导出。实验区空三关系模型如图6 所示。
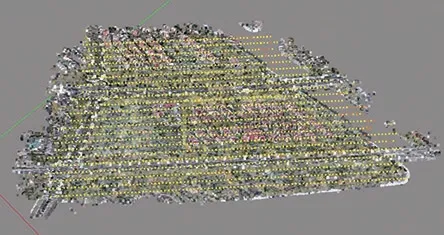
图6 空三加密
(4)模型重建。空三精度满足要求后,开始进行模型重建。利用ContetxtCapture 进行空三多视影像密集匹配,生成高密度三维点云数据,构建不同层次细节下的不规则三角网TIN,同时生成带白膜的三维模型。根据POS 数据计算TIN 模型中每个三角面与影像对应区域间的几何关系,将对应的纹理图像与三维TIN 模型进行配准,最后通过纹理影像的反投影实现纹理贴图,生产城市实景三维模型。实验区局部实景三维模型成果如图7 所示。

图7 实验区局部区域三维点云及实景三维模型成果
(5)三维模型精度。
①模型复杂度。基于三维模型浏览平台,360°旋转观看真三维模型成果,模型与实体地物无缝衔接;建筑物、道路等主要地物要素主体完整,轮廓清晰,屋顶、阳台等细节表现良好。但植被模型细节表现不完整、有些树木出现漂浮情况,一些尺寸较小的地物如电线杆、通讯基站、塔吊等没有表现出来[8]。按照《基础地理信息三维模型产品规范》[9]相关模型复杂度来衡量,该三维模型成果复杂度介于Ⅱ级到Ⅲ级之间。
②模型几何精度。为了评定倾斜影像构建出的城市三维模型成果精度,在测区选取约0.2km2的区域检核,将外业实测的20 个三维坐标与模型上采集的三维坐标对比分析。几何精度如表1 所示。

表1 三维模型精度统计(单位:m)
利用倾斜影像自动生产的三维模型成果,平面最大误差为0.422m,最小误差为0.157m,中误差为0.285m,高程方向最大误差为0.537m,最小误差为0.312m,中误差为0.439m,完全满足《三维地理信息模型数据产品规范》中Ⅰ级成果平面位置中误差不超过0.3m,高度中误差不超过0.5m 的要求[9]。
4 结语
基于无人机倾斜摄影测量技术进行城市三维建模,包括数据采集、处理分析、三维建模及数据管理等工作。本文以郑州市某小区三维建模为例,基于无人机航空摄影测量技术,采用Smart3D 专业软件,经过区域网联合平差、多视影像密集匹配及纹理映射等关键技术,快速构建该区域实景三维模型。经验证,该方法自动化程度高,生产成本低,有效提高了工作效率,并具有纹理真实、精度高等优点,能够快速实现城市三维景观的可视化,满足城市三维建模需求。