与联合收割机配套打捆机喂入机构结构设计与仿真分析
2022-04-20毋高峰
毋高峰
(焦作师范高等专科学校 理工学院,河南 焦作 454000)
1 绪论
农作物秸秆具有很高的使用价值,随着我国利用秸秆技术的发展,农作物秸秆的需求量随之增多,但目前存在难以将秸秆快速收集利用的问题[1-2].尤其是在小麦、水稻、玉米等作物收获季节,旬降水量和旬降水时间都较平时多,增加了短期内将散碎秸秆收集的难度.
秸秆打捆机(后文称为配套打捆机)是一种可快速收获秸秆的打捆机.该机器直接安装在联合收割机的左侧,通过链条从联合收割机处获得动力,与联合收割机组成了粮食收集和秸秆打捆同步的一体机.这种装置极大提高了农作物剩余秸秆的收获速度,降低了运输成本,提高了秸秆收集利用的效益[3-4].
工作前,将秸秆打捆的捆绳经打结机构和机架的穿线孔安装到位.工作中,联合收割机的出草口将作物秸秆喷出后,与出草口直接对接的配套打捆机喂入机构将秸秆输入集草箱中.紧接着压缩机构的活塞往复运动将秸秆压缩,随着秸秆的不断进入,以方片状的秸秆捆不断推动计量轮旋转.当压缩后的片状秸秆捆不断叠加,形成的大方块秸秆捆长度达到设定值时,打结机构工作,将捆绳送入打结机构中的打结器,由打结器完成系捆动作。随后成型的秸秆捆会被压缩结构推出机架,掉落到地面,至此,一个完整的打捆动作完成.
2 喂入机构喂料分析
喂入机构喂入秸秆的均匀程度、喂入量和喂入速度等因素的好坏,直接影响配套打捆机的后续动作.因此喂入机构工作质量十分重要,喂入机构出现问题轻可导致秸秆堆积堵塞,重则导致配套打捆机损坏.因此,对喂入机构的工作有三点要求:第一,喂入机构的拨辊拨齿的旋转拨入运动、转速可以保证秸秆正常喂入;第二,在压缩机构的活塞运动至后端点时,可以同时协助将喂入的秸秆推入压缩成捆;第三,当压缩机构的活塞开始前行时,阻挡后续秸秆的进入,保证活塞后面不再出现秸秆[5-7].
3 喂入机构的参数确定
3.1 出草口秸秆运动特性
目前,市场上的联合收割机从出草口喷出的秸秆,利用的是分离清选系统的风机作用.分离清选系统中的物料速度用Va表示,Va的计算由Va=kρFV2所得[8-9],式中:k—阻力系数;ρ—空气密度,g/m3;F—物体的迎风面积,m2;V—气流速度,m/s.
以河南小麦秸秆为例,市场主流机型小麦秸秆的Va=8.5m/s左右,小麦秸秆喷出量在0.7kg/s以上[10-11].
3.2 喂入机构的关键部件
拨辊.利用伸缩拨齿原理,可有效防止作物秸秆缠绕拨辊,避免堵塞,应设计拨辊为三齿两排的伸缩拨齿机构.3排拨齿每2个一组并排铰接在拨齿轴上,每组相隔120°.为防止拨齿端点磨损后造成拨齿出入困难,在拨齿运动到最底端时,拨齿能超出辊筒外8mm,所设定的辊筒半径r为264mm,拨齿长度L为185mm,偏心距e为33mm.
拨辊转速.据上文,出草口秸秆喷出量大小约为0.7kg/s,按照1kg/s的喂入量去设定拨辊的转速.拨辊旋转动作近似为圆柱,喂入体积按照V=πL2W-πr2W计算;辊筒旋转一周秸秆的喂入量按照m=ρkV计算.式中:W—喂入宽度,m;L—拨齿长度,m;r—拨辊半径,m;ρ—小麦秸秆密度,kg/m3;k—拨辊的充满系数.
可配套安装秸秆打捆机的联合收割机出草口宽度为0.45m,在此W取值为0.45m,k按照设定标准取值为0.1[12-13],可计算得到n=1/m=138r/min.
拨齿指端的速度、位移、加速度方程如下式所示,式中以拨辊主动轴为参考.
上活塞设计.上活塞的设定可以加大通过喂入机构后秸秆的密度,也可以加强与拨辊运动的配合,以及与配套打捆机主活塞运动的配合.上活塞的动力由活塞链轮提供,运动时序由正时链轮控制.上活塞运行到最上端时配套打捆机的主活塞运动到最远端.在上活塞下端设计一个合页,可以在上活塞下行运动时,合页折叠,起到压片的作用,可以更好地将秸秆压缩喂入.
4 喂入机构虚拟仿真
文中利用ADMAS软件对喂入机构进行虚拟仿真分析,确定拨辊拨齿的运动规律,验证设计的正确性.在虚拟仿真前,为达到更加直观的观察,首先将喂入机构结构简化,留下与运动相关的零件,在导入ADAMS仿真软件时,喂入机构的结构要最简化[11].本文利用SolidWorks软件进行结构简化.
简化后的模型主要留下曲柄、主动轴、拨齿轴、拨齿(每排拨齿1个),再向简化后的模型添加动作约束和驱动.在喂入机构工作时,拨齿的转动由辊外壳转动带动,曲柄固定不运动,最后拨齿的伸缩运动由所设定的偏心距实现.因此,将曲柄和地面添加上固定约束,辊筒与曲柄添加相对的旋转副,并将其运动设定为主动,转速设定由138r/min换算为828°/s.另外,对于曲柄和拨齿、壳体与拨齿添加上实体接触约束,拨齿与曲柄添加相对的旋转副.添加约束后的简化喂入机构拨辊三维简图如图1.ADAMS虚拟仿真中设定的单位选择为默认设置.

图1 添加约束的拨辊仿真模型
大于一个周期的观察时间可以更好地观察完整的仿真运动,按照上文添加驱动时所设置的速度828°/s,一个运动周期时间经计算所得为0.436s,为观察完整运动仿真情况,此取End Time=1.5s.拨辊为逆时针旋转.之后开始虚拟仿真分析,通过仿真分析,绘制拨齿的运功轨迹,更加直观地了解拨齿的运动.拨齿的运动符合喂入秸秆所需的运动,使喂入的秸秆能随着拨齿的运动到达相应的位置,拨齿在辊筒的最下端伸出,随后拨齿伸出筒外的长度逐渐增大.拨齿端点的速度变化情况见图2,从图中可以看到拨齿端点的速度变化规律.三条曲线分别表示拨齿指端的合成速度V、Y速度和X速度曲线.
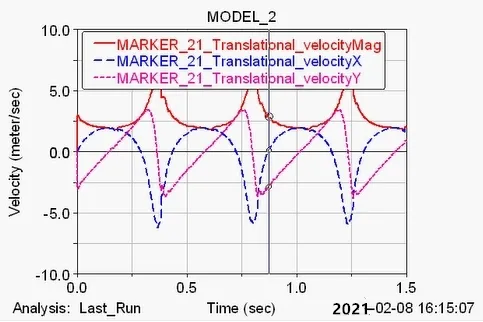
图2 拨齿端点速度曲线
为防止从零时作为仿真运动的起点因突然加速度导致参数突然波动,造成后续计算不够准确,仿真中将拨齿刚转出辊筒、拨齿运动的最下端设定为仿真运动的起点,标记为端点1,随后按照转动90°后再固定设置一个标记点,依次为2、3、4点.

表1 拨齿端点的速度
据上文结果分析,从1点运动到2点的过程,为拨齿开始转出辊筒的阶段,1点处Y方向速度几乎为0,合速度V与X速度基本相同,约值均为1.9131m/s.合速度V、Y速度不断增加,当拨齿端点到达2点时,X速度近乎为0,说明此时拨齿开始拨动将秸秆喂入,使秸秆能够顺利喂入到机构的集草箱中.
从2点运动到3点,合速度V和X速度继续增大,拨齿伸出辊筒的长度继续增加,同时拨入秸秆的喂入力度也在增加.拨齿端点到达3点时,合速度V和X速度达到最大,此时拨动秸秆喂入的力度最大。在运动到3点时相比于1点有更高的喂入效率.
拨齿伸出的最短点在点1,此时拨齿的速度、力度最小,消耗能量最少.从3点经4点再运动回1点的过程,合速度V不断减小,拨齿伸出辊筒的长度也逐渐变小,可以有效避免作物秸秆缠绕辊筒,防止将已喂入的秸秆因拨齿运动被挑出.
通过分析配套打捆机喂入机构的喂入动作和联合收割机出草口秸秆运动特性,检验配套打捆机喂入机构的工作可靠性.利用ADMAS仿真软件对喂入机构的运动进行仿真,得到其拨齿运动规律和运动状态。仿真分析得到拨齿的运动状态和端点运动速度及整个运动过程中的运动轨迹.设计的喂入机构可以满足秸秆喂入的需求,为喂入机构的进一步优化设计打下了基础.
