富水地层超深装配式竖井水下机械法掘进施工技术
——以南京某沉井式停车设施建设项目为例
2022-04-20张振光蒋海里付武荣
张振光, 徐 杰,*, 汪 盛, 蒋海里, 郝 亮, 付武荣
(1. 上海公路桥梁(集团)有限公司, 上海 200433; 2. 上海城市基础设施更新工程技术研究中心, 上海 200032; 3. 南京市建邺区高新科技投资集团有限公司, 江苏 南京 210019)
0 引言
近年来,开发利用深层地下空间成为热点,一系列应用场景随之被提出。传统的竖井建造工艺如地下连续墙、桩基等受场地及环境保护等级限制,其局限性愈发凸显。
沉井工艺作为竖井常用的施工工艺,依靠竖井自身重力,或额外施加的外力克服井壁摩阻力,或同时借助空气幕、触变泥浆套等措施使竖井下沉到设计标高。沉井构造简单、施工场地较小,但因其是一个动态施工的基础工程,在施工过程中往往会出现诸如偏斜、突沉、滞沉、超沉等问题[1-6]。
在应用时,沉井工法被质疑最多的是其下沉过程对周围土体造成的较大且不可控的扰动破坏[7]。国内外诸多学者采用数值模拟对沉井井周的土层变形量进行了预测,其中,戴根宝等[8]采用三维有限差分方法,张玉生[9]选用黏弹性的扩展的开尔文模型,冯兆祥等[10]采用ABAQUS,邓友生等[11]采用Midas/GTS,万昌中等[12-13]利用ADINA,Li等[14]采用Plaxis3D,Lai等[15]采用欧拉-拉格朗日耦合法,Sun等[16]采用Mohr-Coulomb模型,Wang等[17]基于离散单元法、采用颗粒流程序进行变形预测。
对竖井结构本身,基于“时空效应”,需要在下沉过程中实现结构的快速建造,因此,装配式理念被引入,并衍生出多种装配形式,比较成熟的应用有澳大利亚Humes公司以及英国FP McCann公司的产品。但是,现有的装配式管片设计包含诸多特殊功能块,连接形式不易操作,且传统沉井助沉措施与装配式管片拼装存在冲突。
为解决传统沉井下沉阻力大、姿态不受控、对环境扰动大等缺点,本文介绍一种全新的全自动机械式竖井掘进技术,其采用不排水开挖、沉井整体悬吊下沉、机械臂搭配铣筒切削地层、井筒预制装配式拼装等理念,对于诸多软弱或扰动易失稳的工况具有极强的适应性。同时,以南京市建邺区超深装配式竖井工程为例,详细介绍富水地层超深装配式竖井不排水施工关键技术;并基于现场监测数据,分析新型竖井掘进技术对周边地层的影响,为后续采取相应的控制措施提供技术支持,以期开拓沉井施工新的应用时代。
1 工程概况
南京某沉井式停车设施建设项目采用水下全自动机械式竖井掘进技术施工预制装配式竖井。竖井横断面为圆形,内径12 m,外径12.8 m,壁厚0.4 m;竖井结构纵向尺寸为63 m,包括3 m的刃脚以及40环管节;竖井不排水、素混凝土一次封底厚度为6 m,其中刃脚底以下封底厚度为3 m;竖井顶部为2 m高的后浇结构,因此,竖井实际掘进深度为68 m;竖井顶部设置圈梁,用于承载竖井结构和竖井掘进机的有效自重。装配式竖井结构剖面如图1所示。
竖井结构采用预制混凝土管片拼装而成,每一环由6块管片通过环向螺栓连接,环高1.5 m;环间通过纵向螺栓连接,设置剪力销增强竖井抗剪能力;每块管片中心分块角度为60°,质量约为9.7 t。由于竖井结构轴线方向完全垂直,管片的宽度方向不设楔形量,即保持1.5 m环宽不变,管片拼装示意如图2所示。

图2 管片拼装示意图
本工程竖井结构水平方向只受周边水土压力,在理想状态下圆环受到均匀压力的作用,只产生轴力,没有弯矩。考虑到土层性质的不均匀性对结构内力的影响,假定在互成90°的2点处土体的内摩擦角差值为10°,以此为背景,选用合适的参数进行计算。
管片计算选取埋深较大的第3环为对象,管片深度为58.3 m,位于⑤1强风化砂质泥岩中。地层抗力取3 000 kN/m3,通过有限元模拟得出弯矩最大值为212 kN·m、轴力最大值为5 060 kN。根据上述工况的内力,按结构裂缝和强度双控进行配筋计算。弯矩调整系数ξ取0.3,荷载分项系数恒载取1.35,重要性系数取1.1。
经计算,裂缝为控制因素,主筋面积为3 810 mm2,实配钢筋为4φ25 mm+6φ22 mm,面积为4 244 mm2,满足要求。因此,400 mm厚的管片在满足上述配筋的条件下,结构强度满足设计要求。
封底混凝土设计厚度为6 m,地下水位考虑标高为5.300 m,封底混凝土底标高为-61.950 m,水深为67.25 m。考虑封底混凝土与刃脚接触面位置封底混凝土本身抗剪,为受力最薄弱处。此处封底混凝土厚度约为4 200 mm,剪力设计值安全系数取1.27,根据混凝土受剪承载力计算公式计算封底混凝土抗剪能力,计算结果如表1所示。由表1可知,计算结果满足要求。

表1 封底混凝土抗剪能力计算结果
2 工程概况及水文地质情况
2.1 地质概况
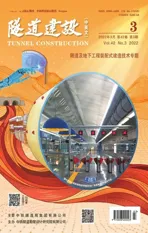
本工程所在区域地貌单元属长江漫滩,竖井向下穿越地层较多,包括上覆的②2软弱淤泥质粉质黏土,巨厚的②3、②5粉细砂层带微承压水,粒径10~100 mm的④卵砾石层,下伏的⑤强—中风化砂质泥岩,为典型的软硬差异较大的复合地层。掘进过程中,对于竖井的姿态控制、掘进设备的参数设置等提出较高要求。竖井掘进穿越段各土层物理力学性质指标见表2。
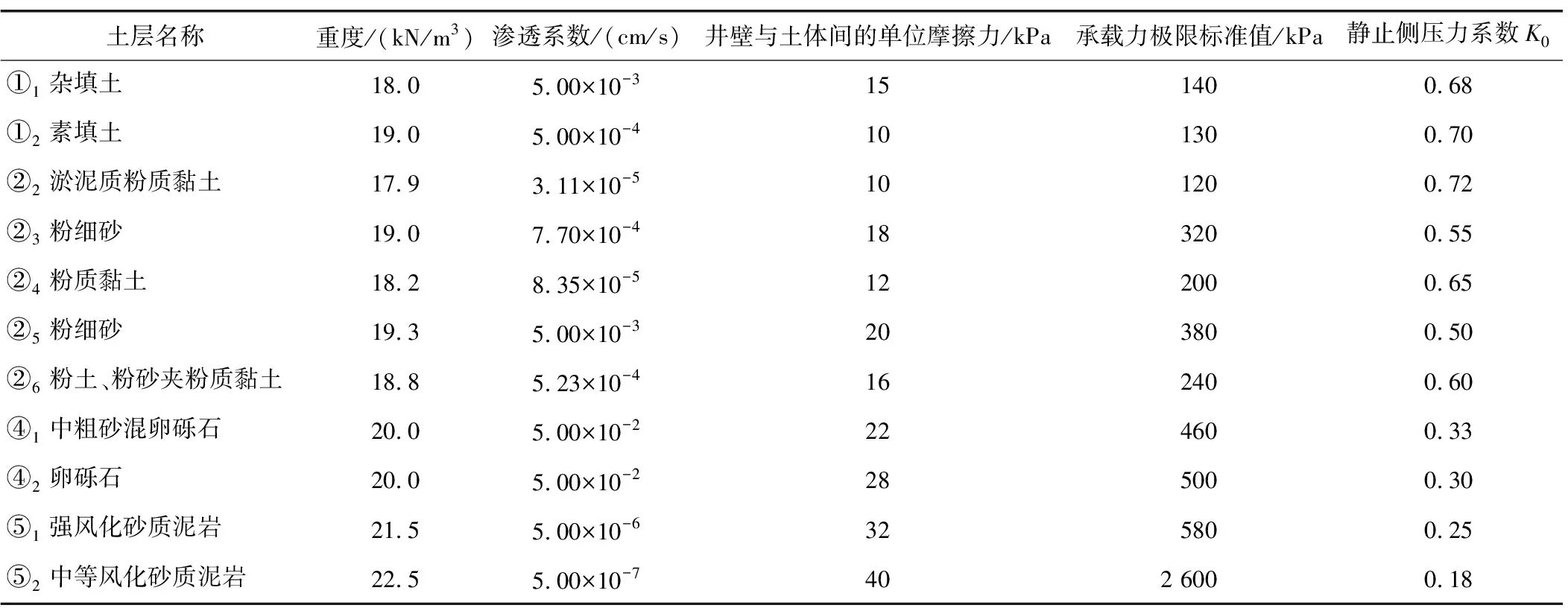
表2 土层物理力学性质指标
2.2 水文地质
场地地下水类型主要为潜水和承压水。潜水主要赋存于①1、①2层表层填土及第四系沉积的②2层淤泥质粉质黏土中,稳定水位埋深为3.50~3.60 m。承压水主要赋存于②3层粉细砂,②5层粉细砂,②6层粉土、粉砂夹粉质黏土,④1层中粗砂混卵砾石和④2层卵砾石中,以②2层为顶部隔水层,基岩为底部隔水层。承压水含水层水量丰富、透水性较好、厚度大,以上部潜水垂向越流补给、长江等地表水系的侧向径流补给为主要来源,以侧向径流形式为主要排泄方式。
3 竖井水下机械法掘进设备系统及主要施工工序
3.1 掘进设备系统组成
全自动机械式竖井掘进系统主要包括竖井掘进机、沉降单元、供给卷扬塔、回收卷扬及泥水分离系统,如图3所示。
1)沉降单元。通过钢绞线与刃脚相连,在竖井下沉过程中负荷竖井及竖井掘进机的有效自重,可使竖井结构按预控值稳定受控下沉。沉降单元由一个用于驱动钢绞线行程的活塞油缸和2套夹紧装置组成,并固定于圈梁之上。
2)回收卷扬。用于将竖井掘进机从井筒底部回收至地面。
3)供给卷扬塔。由具有制动功能的液压驱动装置和能量链组成,主要作用是在竖井下沉过程中通过能量链向竖井掘进机输送液压油、电力、润滑油和循环泥浆。
竖井掘进机吊装至井筒内,由3条可伸缩钢梁通过预埋件固定于第1、2环管片内壁之上。竖井掘进机底部的可旋转伸缩臂可伸长1 000 mm,并可沿垂直轴旋转±190°;伸缩臂端部安装有铣筒,可配置适合不同地质条件的截齿。竖井掘进机详细技术参数如表3所示。
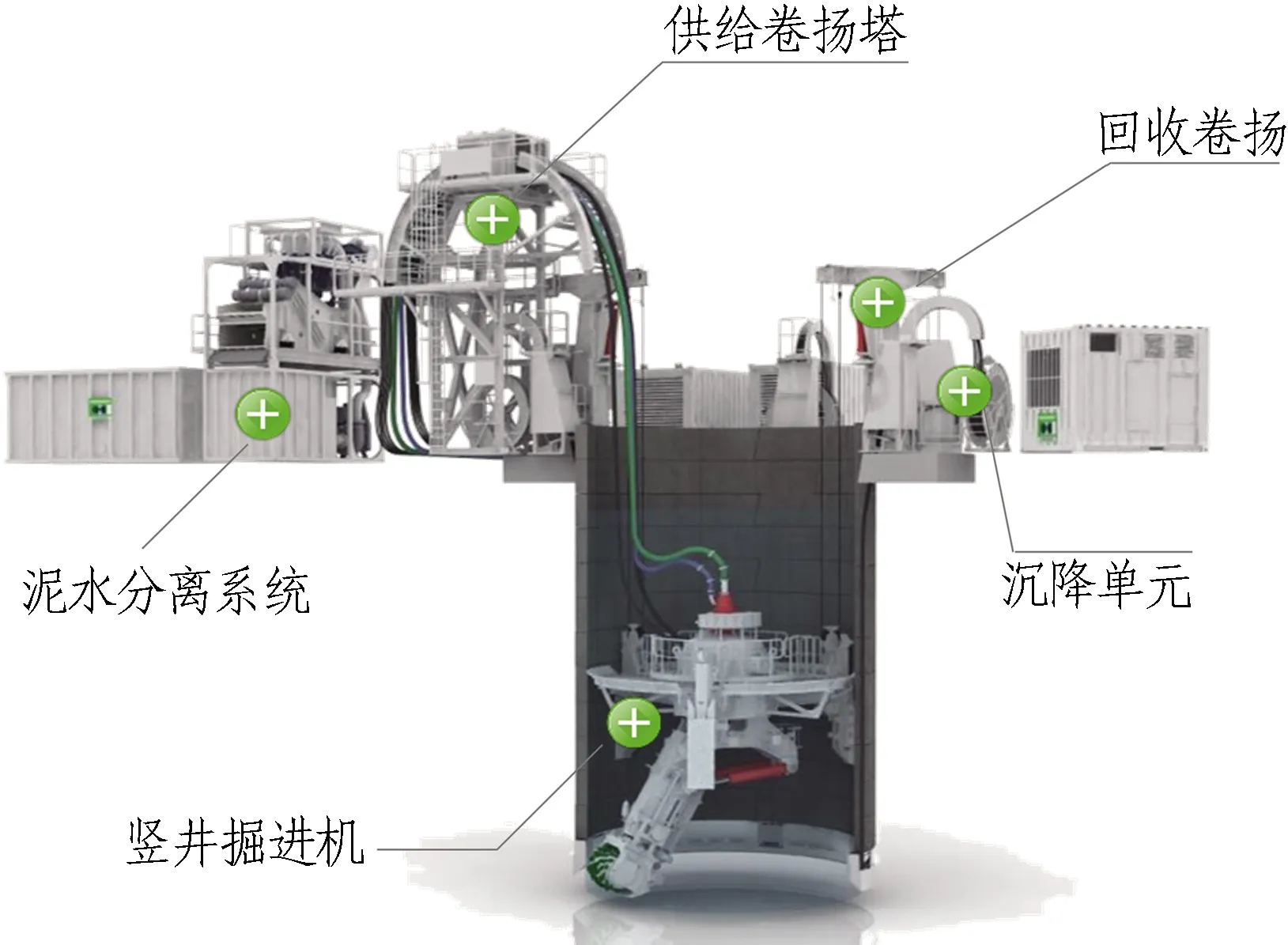
图3 全自动机械式竖井掘进系统概览

表3 竖井掘进机技术参数
3.2 水下机械法掘进施工原理
竖井掘进机采用全密封形式与外部水环境相隔,能在高水压下工作。在整个掘进下沉过程中,竖井掘进机始终在竖井底部通过伸缩臂驱动铣筒切削地层。伸缩臂可按设定自动执行上转、下转和旋转动作,可完成整个竖井断面的挖掘以及一定超挖。借助铣筒底部的大功率吸浆泵,将泥浆泵送至地面上的泥水分离系统。掘进过程保持井筒内的液位始终高于周边地层地下水位2~3 m。
超挖形成的竖井外壁与地层之间的环状间隙以膨润土浆液填充,与井筒内的泥浆(相对密度控制在1.18以上)、地下水位共同形成一种稳定的水力状态。
竖井依靠自重下沉,同时通过沉降单元带动钢绞线使下沉处于受控状态;竖井始终悬浮于泥浆池中,可忽略侧摩阻力。预制混凝土管片始终在竖井顶部拼装,且环向螺栓手孔置于管片外侧,作业人员在掘进全程无需进入井筒内。竖井掘进机施工过程中,可通过回收卷扬自竖井底部回收至地面以上进行检修以及更换刀具。通过以上的一系列操作,可实现竖井的水下全自动机械式掘进下沉施工,施工原理如图4所示。
图4 竖井不排水施工原理图
3.3 装配式竖井不排水施工工序
装配式竖井不排水施工工序如图5所示。
3.3.1 地基加固
由于全自动机械式掘进施工需要圈梁承载竖井结构和竖井掘进机的有效自重,因此圈梁下方的地基需要有足够的承载力,当原状地基承载力不足时需进行地基加固。地基加固可采用水泥土搅拌桩,也可采用钻孔灌注桩或管桩,以应对较软弱的地基。
3.3.2 刃脚施工
刃脚高度3 m,内径12 m,厚度与管片一致,为400 mm,底部为45°向外的楔形结构,起一定的切削地层的作用。刃脚采用钢刃脚加预制管片组合形式。钢刃脚设计高度为1.5 m,利用钢肋条代替钢筋笼,整合锚固盒、预埋件、内部螺杆、环形钢板等构件。
3.3.3 高精度设备安装
承重圈梁施工时,同步安装沉降单元、回收卷扬、供给卷扬塔设备预埋件。
首先,安装沉降单元,连接钢绞线,使刃脚、第1~2环管片、圈梁形成一个协同受力整体。当钢绞线穿束完成并夹紧后,进行钢绞线预张拉,使其具备一定预应力,以使竖井始发结构处于稳定状态。沉降单元根据其安装数量,在环井筒均匀分布。通常采用4个沉降单元,呈十字形分布在4个方向。
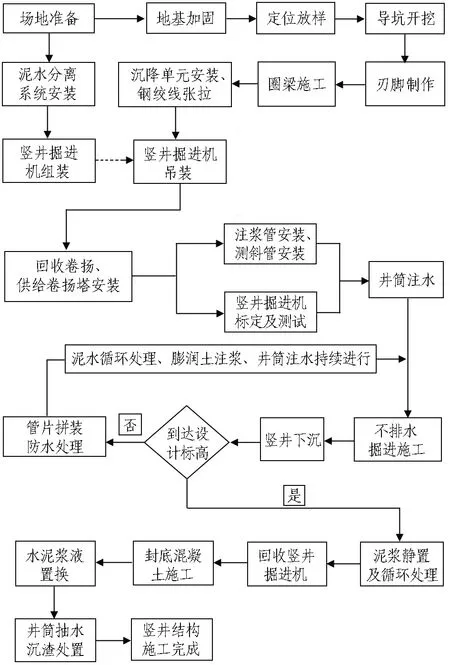
图5 装配式竖井不排水施工工序
值得注意的是,整套全自动机械式掘进系统需要在井口密布8个配套设备。在进行设备精确定位时,需要复核回收卷扬的轴线以及供给卷扬塔的边缘与管片的中心线是否冲突,避免因定位误差导致后续管片拼装困难。竖井掘进机及配套设备布置如图6所示。
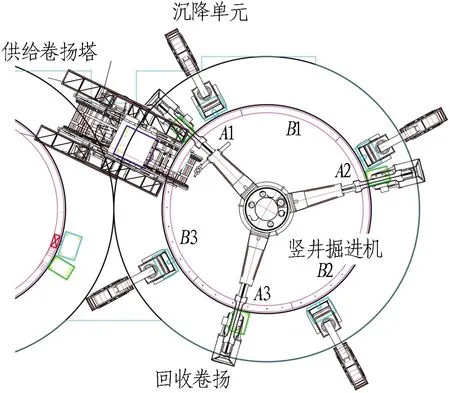
图6 竖井掘进机及配套设备布置
3.3.4 大承载力锚固体系
全自动机械式竖井掘进技术需要将井筒通过钢绞线始终保持悬吊状态,以实现受控下沉的目的。因此,需要在竖井刃脚中预埋大承载力的钢绞线锚固装置,防止钢绞线滑脱造成沉井姿态失控。
大承载力锚固体系由锚固盒、锚板、压板以及夹片构成。将钢绞线穿过沉降单元的活塞油缸,沿井筒外壁与地层之间的空隙自上而下穿入锚固盒内的钢绞线通道,随后将钢绞线分别穿入锚板上的对应钢绞线孔道,将夹片包裹钢绞线,楔入钢绞线孔道;对单个锚固盒中的所有钢绞线施加一向上的力,使得锚板紧紧贴住锚固盒内的法兰板,夹片内侧的齿纹紧紧咬住钢绞线,同时牢牢楔入外大内小的钢绞线孔道中。至此,整套锚固体系构建完成,如图7所示。

图7 锚固体系侧视图
待4个锚固盒内的钢绞线全部穿束到位后,应对每一根钢绞线进行预张拉,保证所有钢绞线能够均匀受力。
3.3.5 素混凝土封底施工
竖井下沉到设计标高,使用铣筒对底部开挖面进行反复铣挖,清除浮渣使得轮廓清晰;随后回收竖井掘进机,采用高扬程排污泵对底部泥浆进行循环以降低泥浆相对密度,待底部泥浆相对密度降至1.05以下,视为清底完成。
在竖井顶部架设封底作业平台,安装导管。水下混凝土浇筑采用导管法对角浇筑,浇筑半径为4.5 m左右,导管上顶端安装方形漏斗。混凝土坍落度要求为220~240,并添加缓凝剂和微膨剂,和易性能良好,泌水率小于4%,初凝时间不低于6 h,导管插入到离竖井底部300~400 mm处。封底浇筑示意如图8所示。
3.3.6 超挖间隙水泥浆液置换填充
当封底混凝土实施完成,并达到设计强度要求后,对井壁外作润滑用的膨润土浆液采用水泥浆液进行置换。水泥浆液水灰比为1∶1,注浆量控制在理论空隙的110%~130%。置换时首先采用1环和3环的预埋注浆管,置换过程需连续,直至观察到新鲜的水泥浆液从井口溢出为止。若注入理论注浆量的130%仍无新鲜的水泥浆液溢出,则酌情启用21环和30环的预埋注浆管。

图8 封底浇筑示意图(单位: mm)
4 超深竖井水下机械法掘进施工技术
4.1 施工主要风险
在采用了水下全自动机械式竖井掘进技术以后,传统沉井施工中的沉井突沉、超沉或卡滞等问题已不是风险点,影响施工质量及安全的主要风险如下:
1)需纵向穿越从软到硬的复合地层,掘进过程无既有经验可参考,如何针对不同的地质情况调整不同的施工参数(超挖量、单次掘进深度、掘进速度、下沉量等)是关键。
2)正常下沉阶段底部为超挖状态,在软土层中开挖较深时应注意开挖面的稳定性。
3)穿越承压水层时,注意地下水渗流对侧壁以及开挖面稳定性的影响。
4)采用管片拼装结构应注意施工过程中的竖井垂直度控制,避免因软土层侧压力系数较大引起土体发生明显的横向位移,导致竖井垂直度偏差较大,进而产生较大垂直向弯矩,致使管片连接螺栓节点产生较大应力。
5)竖井下沉姿态纠偏的时效性。由于竖井深度过大,且为不排水开挖,只能通过设备内置的倾角仪和井壁上安装的侧斜管间接观测竖井姿态,因此偏移监测的时效性以及纠偏的及时性需保证。
6)卵砾石层卵砾石体积分数为40%~60%,粒径为10~100 mm,局部最大粒径大于100 mm,骨架颗粒分布疏密不均,极易堵塞吸浆泵的泥浆管路,掘进过程需时刻注意吸浆泵压力,及时调整吸浆泵流量,防止堵管。
7)切削岩石地层时,应避免铣筒推力、转矩过大导致设备受损及刀具崩坏。
8)对周边环境的影响。传统沉井对周边沉降控制效果较差,本文介绍的新型施工工艺对环境影响的控制效果有待实际工程验证。
4.2 掘进
竖井掘进机伸缩臂铣筒宽1.5 m,本工程井筒外径12.8 m,竖井掘进机在开挖过程中会根据地层属性径向超挖50~100 mm,因此机械臂向外摆动开挖26幅,开挖幅面搭接15 cm,即可确保整个开挖面完全覆盖。
在整个竖井充满泥水后,无需降低地下水位,固定在伸缩臂上的铣筒在沉井的底部便可进行地层开挖和破碎。此时,启动泥水管路,将开挖出来的物料输送到地面的泥水分离系统。泥水分离系统将泥水与渣土分离后,又将泥水循环注入竖井中。
竖井下沉过程中连续穿越软硬不均的土层,分层掘进参数如表4所示。正式掘进时,各项参数也并非一成不变,需要在试掘进的基础上,根据各参数变化规律、掘进土层变化、实际施工需求等,由操作人员实时调整,调整逻辑如图9所示。

表4 地层分层掘进参数

图9 竖井下沉掘进施工工序
4.3 下沉
铣挖完成后立即下沉。下沉过程中,在闭合全部夹紧装置的情况下,沉降单元内的活塞油缸上部活塞向上延伸20 mm,以在钢绞线上施加拉应力,使下部夹紧装置内的夹片在钢绞线摩擦力的作用下脱开释放,此时,井筒的质量全部作用在上部夹紧装置之上。使油缸上部活塞缓慢下移,直至将井筒降低到先前设定的深度。完成此过程后,闭合2个夹紧装置。
设备在掘进过程中每50 min可开挖完成整个断面,随后的井筒下沉时间约为5 min,理论上可在1 h内完成1次开挖掘进过程。不断重复以上流程,直至竖井下沉到设计标高。
刃脚楔形设计,伸缩臂及铣筒在竖井刃脚以下的超挖,连同井壁外侧环状间隙中的膨润土,共同降低了竖井外壁与周围地层之间的摩阻力。
4.4 管片拼装
利用预制管片进行装配可大大提高效率。通常,拼装2环(即3 m高)管片用时约4 h,而施工同样高度的现浇环则用时需增加数倍(包括钢筋绑扎、钢模安装、混凝土浇筑及养护、拆模),且用工数量前者也大大少于后者。同时,预制装配式竖井整圆度也优于现浇结构,这对随后沉井下沉过程的均匀超挖将起到极大的作用。但是,相对而言,现浇混凝土结构的整体性以及结构强度优于装配式结构,因此,建议在不同应用场景灵活选择2种形式。
预制管片块与块间以2根M27的环向螺栓紧密相连。环与环间以18根M27的纵向螺栓相连,6块管片以“3上3下”的形式进行拼装,如图10所示。为了提高竖井结构竖向及横向的整体刚度,环间采用错缝拼装,相邻环间的旋转角度为20°。错缝拼装具有圆环管片接缝刚度分布趋于均匀、圆环整体刚度高、接缝及整体结构变形小等优点。
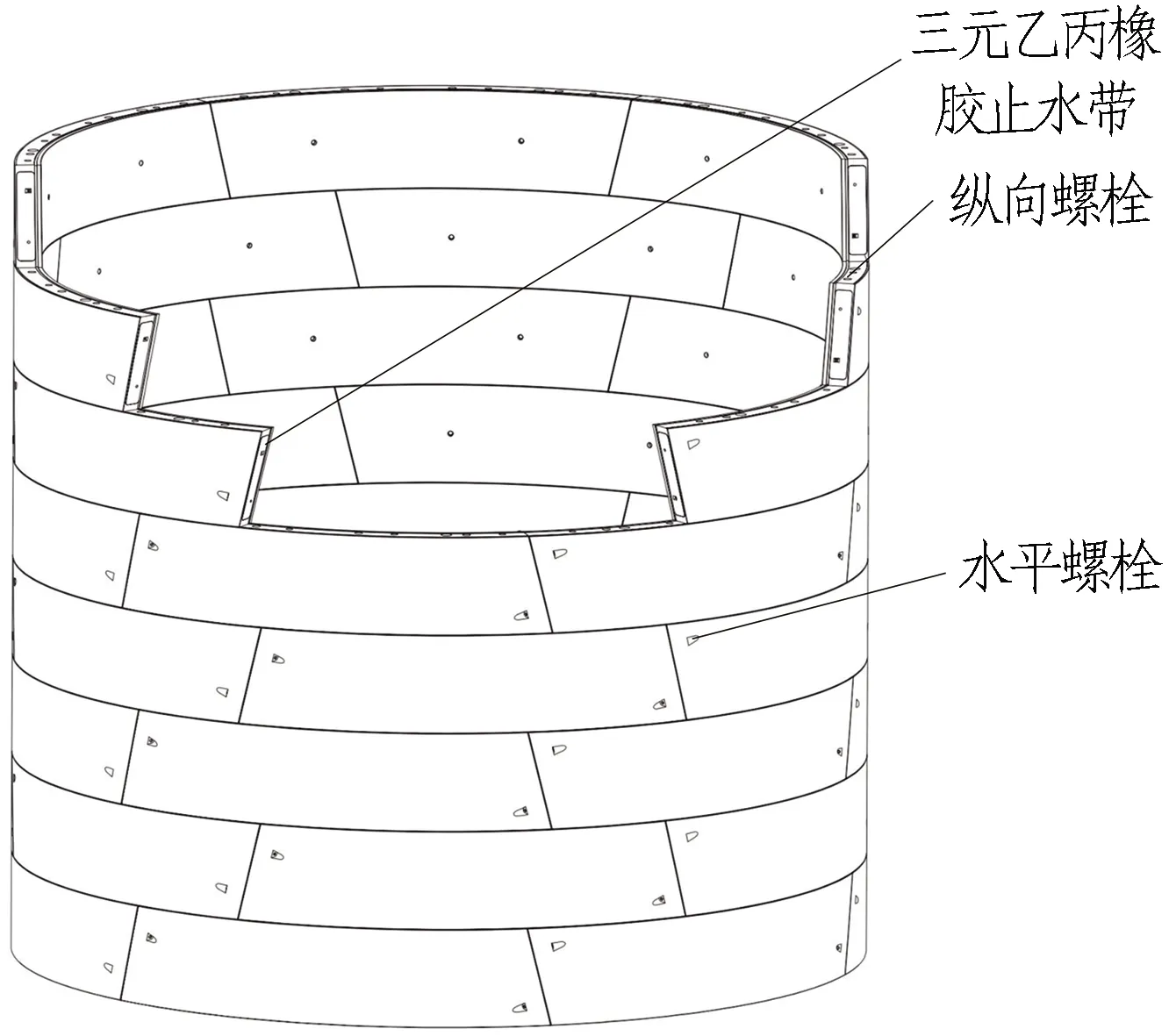
图10 竖井管片拼装
在管片的内弧面侧设置1道三元乙丙橡胶止水带。根据数值模拟结果,管片接缝在张开6 mm、错台10 mm的工况下,防水压力依然能达到1.2 MPa以上,满足结构防水需求。
管片由起重机吊运至指定位置,以剪力鞘为定位基准,将上下管片对齐,并插入相应纵向螺栓进行临时固定。相邻2块管片就位后,将环向螺栓依次插入相邻管片拼缝处的手孔中进行固定。
4.5 姿态控制及纠偏工艺
4.5.1 竖井多重姿态监控系统
竖井设置了多重姿态监控系统,具体可以分为上部、下部、整体3个环节。深井的上部姿态监控包含了井筒顶部各点位的高差、井筒外弧面与地面圈梁结构内弧面的间距、顶部管片的垂直度等;下部的姿态监控则以竖井掘进机内的倾角计为主,由竖井掘进机与竖井底部结构连接固定,通过获取x、y2个方向的倾斜角度读数,可判断竖井底部的倾斜度及走向;另外,井筒内壁还设置了2道纵贯顶底的测斜管进行整体的姿态监控。
在实际施工中,时效性最强、最有参考价值的监测数据来自测斜仪以及倾角计。2种判定竖井偏移的监测手段如图11所示。2组坐标轴的正方向均指示竖井底部相对于顶部的偏移方向。因此,通过2组读数的正负以及数值大小,即可综合判定竖井偏移方向及程度。

图11 竖井偏移判定标准
4.5.2 竖井姿态控制措施
竖井的纠偏方法主要有2种,以图12中的竖井偏移方向为例:
1)竖井下部向A侧偏移,可以在井筒下沉时对沉降单元的油缸行程进行控制,相对标准行程值,适当增大A侧钢绞线行程,减少B侧钢绞线行程,直至最终监测到偏移被消除为止。当然这种适当的调整通常为每次下沉时设置1~2 mm的差值。
2)竖井掘进机铣筒在进行超挖时,可减小A侧的超挖、适当增大B侧的超挖,使得竖井在A侧地层阻力的作用下,缓慢地向B侧纠正。

图12 竖井姿态纠偏示意图
4.6 沉降变形监测及控制
超深装配式竖井穿越富水复合地层的施工效果可以通过竖井周边建筑及路面沉降监测点的累积沉降量进行分析。双井先后下沉掘进过程中,周边建筑物及道路沉降值时程曲线见图13。

(a) 沉降监测点布置
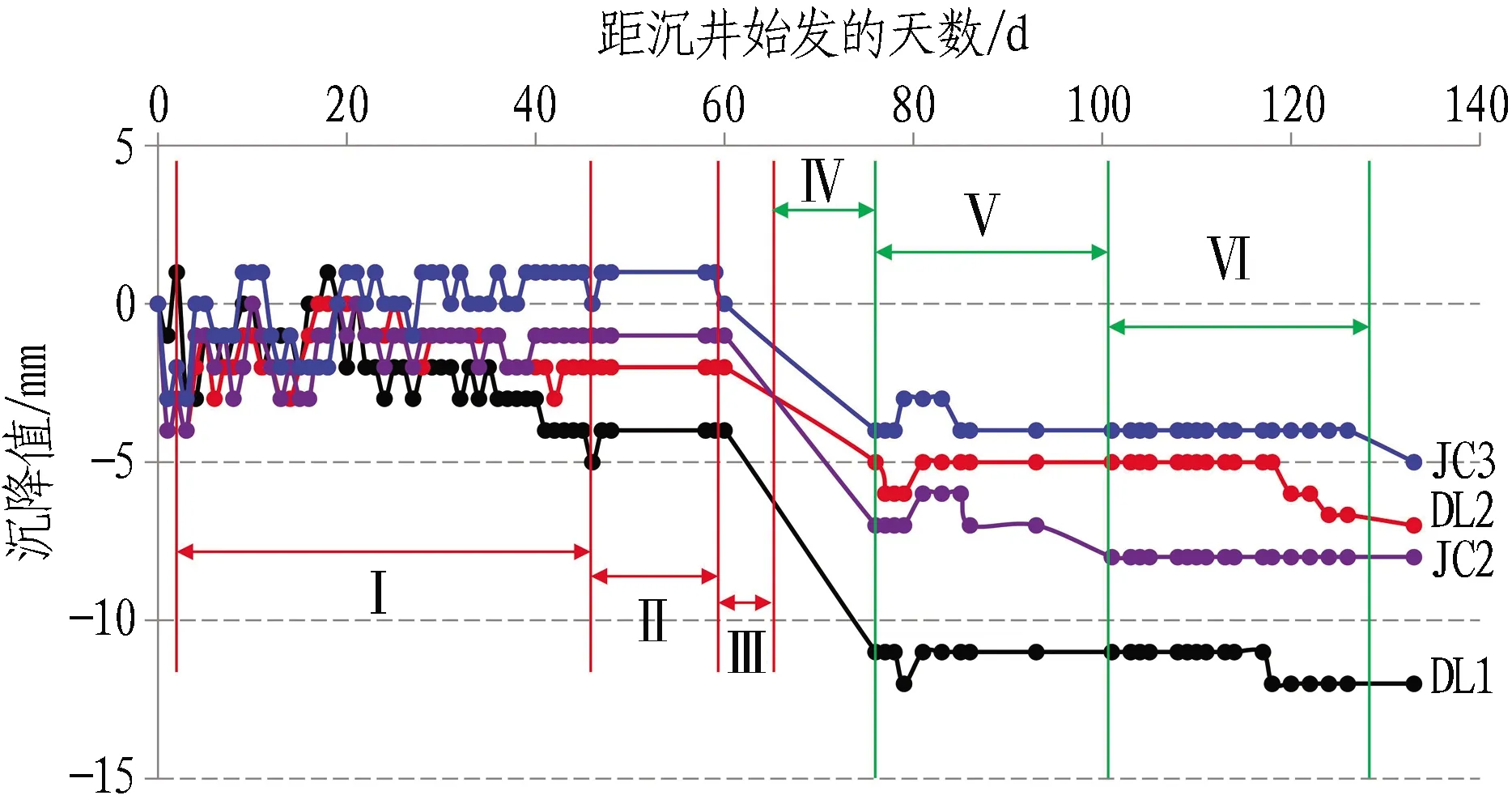
(b) 沉降时程曲线
如图13所示,将整个下沉掘进过程划分为6个阶段: 阶段Ⅰ为1#井掘进施工,阶段Ⅱ为施工暂停,阶段Ⅲ为1#井封底,阶段Ⅳ为2#井导坑放坡开挖及无支护阶段,阶段Ⅴ为2#导坑圈梁支护阶段,阶段Ⅵ为2#井掘进施工阶段。由图中可知,在2竖井的掘进下沉阶段,由于采用不排水开挖,且井筒内液面及泥浆相对密度严格控制,因此,周边几乎不存在沉降;阶段Ⅲ因为需要进行封底前的降泥浆相对密度操作,破坏了井内外水力平衡,因此出现相对明显的沉降;阶段Ⅳ,由于3 m深的导坑采用无支护开挖,且刃脚施工阶段始终处于无支护状态,因此周边地面沉降相对较大。
总的来说,本文介绍的竖井水下机械法掘进技术,在实际施工中对周边环境的影响极小,推广价值大。
5 结论与讨论
本文所介绍的超深装配式竖井的水下机械法掘进施工工艺,施工周期短、竖井姿态控制好、对周边环境影响小,验证了此种施工技术适合富水软土地层中的超深竖井建造。具体结论如下:
1)超深竖井掘进装备为高度集成化的机械设备,按预设值自动化作业;竖井包括刃脚以及井壁结构均采用预制装配式,在保证精度的同时大大提高工效,是下一阶段超深竖井设计及施工的趋势。
2)竖井掘进下沉过程中采用多重姿态监控系统,能实时反映井筒的姿态,同时建立偏移判定标准及纠偏措施。
3)采用超挖配合自重下沉的模式,可完全避免井筒卡滞问题;采用4组沉降单元配合钢绞线控制井筒下沉,有效避免软弱土层井筒突沉的可能性。
4)采用不排水理念,有效控制侧壁地层、开挖面的失稳风险以及周边地面沉降。
5)相比常规的沉井施工工艺,本文所介绍的竖井水下机械法掘进施工技术,在施工用地的集约化、施工影响的微扰动等方面明显占优势,竖井姿态及轴线控制精度明显提高。
目前,对于穿越淤泥质软黏土层、高承压水层时的超挖控制、侧壁地层侧向位移、坑底隆起等尚无工程实例予以验证;软弱土层中的封底技术、装配式竖井结构在不均匀侧向土压力作用下的应力应变响应以及连接形式的可靠性仍需深入研究。