三自由度运动平台的设计与仿真
2022-04-20张士军孟繁勋
张 腾,张士军,孟繁勋
(山东建筑大学机电工程学院,山东 济南 250101)
随着超精密加工、微电机系统、光学技术和纳米技术的飞速发展,对微位移定位平台的运动和定位提出越来越高的要求[1]。微位移定位平台的核心是微位移放大机构,其是微位移定位平台行程和精度的重要影响因素。当前,高精度的微位移定位平台和实时监测平台位移的系统已成为微位移定位平台研究的热点[2-3]。
传统的微位移定位平台大多采用电磁电机驱动,利用机械传动定位,但是由于存在摩擦和回程间隙,难以满足高精度要求[4]。少部分微位移定位平台采用新型的磁致伸缩材料进行位移放大[5],由于受技术限制,目前还无法得到广泛的应用。压电陶瓷作为一种新型的位移驱动器,具有高刚度、高分辨率、无摩擦磨损、响应速度快、体积小和输出力大等特点[6-8],在微纳米级的微位移定位平台中得到了广泛应用。但是,由于压电陶瓷的输出位移较小,不能满足微位移平台的运动需求,常采用杠杆放大机构[9]、桥式放大机构[10]或采用宏、微两级放大机构进行输出位移的放大[11]。相比传统的机械传动连接,柔性铰链具有无间隙、无摩擦的优点,被广泛应用于微位移定位平台。
本文针对超精密加工中微进给工作台[12]对三自由度微位移定位技术的要求,提出了一种基于杠杆原理的二级放大机构,并以此机构为基础设计了以压电陶瓷为驱动元件并与柔性铰链相配合的三自由度微位移定位平台。结合材料力学莫尔积分、伪刚体模型[6]等相关知识进行理论位移分析,得到了压电陶瓷输入力和微位移定位平台输出位移之间的关系,最后应用仿真软件验证计算结果。仿真和计算结果表明,所提出的微位移定位平台的结构满足超精密加工中微进给工作台的要求。
1 机构设计及工作原理
1.1 微位移放大机构的设计
微位移二级放大机构为左右对称结构,取其左侧机构进行研究,如图1所示,由杠杆二级放大机构和楔形机构组成,杠杆二级放大机构包括左侧一级放大机构、右侧一级放大机构和二级放大机构。选择压电陶瓷为驱动元件,压电陶瓷横向放置且位于微位移放大机构的右下方,压电陶瓷输出端的半球结构与楔形机构一侧连接,确保压电陶瓷始终只受到轴向力的作用。楔形机构的另一侧连接折叠弹片,使压电陶瓷与楔形机构紧密连接,当压电陶瓷输出位移时,楔形机构把压电陶瓷的横向位移转换为竖直方向上的位移,经过二级放大机构实现位移的放大。

1—压电陶瓷;2—楔形块;3—折叠弹片;4—左侧一级
1.2 微位移平台的设计
以微位移二级放大机构为基础的微位移定位平台如图2所示,由4组相同的驱动单元、底座和运动平台构成,其中驱动单元由外框和微位移放大机构组成,并固定在底座上,均匀分布在运动平台四周。在不同组驱动单元中的压电陶瓷配合工作,可以实现微位移定位平台的平移或旋转运动。当第1组或第3组驱动单元的压电陶瓷同时工作时,运动平台可以实现沿x轴正方向或负方向的运动;当第2组或第4组驱动单元的压电陶瓷同时工作时,运动平台可以实现沿y轴正方向或负方向的运动;当4组驱动单元左侧压电陶瓷同时工作时,运动平台可以实现绕z轴顺时针的运动;当4组驱动单元右侧压电陶瓷同时工作时,运动平台可以实现绕z轴逆时针运动。
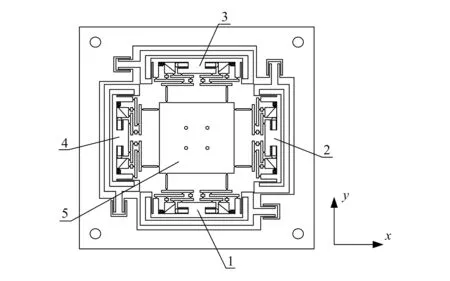
1—驱动单元1;2—驱动单元2;
2 静力学分析
二级放大机构简图如图3所示,O1和O2分别为左侧和右侧一级放大机构的支点,E1为二级放大机构的支点。左侧放大机构中|O1B|<|O1H|,得到左侧一级放大机构的第一级放大;右侧放大机构中|J1O2|<|O2G1|,得到右侧一级放大机构的第一级放大。第二级放大机构中|C1F1|<|E1F1|,得到二级放大机构的第二级放大。在放大机构中采用圆弧形柔性铰链,如图4所示,b=10 mm,t=0.5 mm,r=1.25 mm。

图3 二级放大机构简图

图4 柔性铰链
以O1点为原点,建立坐标系,设θ1为x轴与O1H1的夹角,θ2为y轴与H1E1的夹角,θ3为x轴与C1F1的夹角,θ4为y轴与C1K1的夹角,θ5为x轴与J1G1的夹角,θ6为y轴与F1G1的夹角,θ7为y轴与A1B1的夹角,θ8为y轴与A1J1的夹角。设在A1A2输出的位移为In,在K1点输出的位移为Out。在坐标系O1xy下,由二级放大机构几何闭环约束方程[13]得:
(1)
式中:l**为**方向的长度,如lO1A1为O1A1方向的长度。
根据式(1)-①可得:
(2)
根据式(1)-②可得:
(3)
根据式(1)-③可得:
(4)
根据式(1)-④可得:
l9+l10=l16sinθ4+(l9+l10)cosθ3-l12sinθ6+l13-l13cosθ5
(5)
由于θi非常小,因此当θi趋近0时,sinθi=θi,cosθi=1,联立式(2)~(5)得:
(6)
(7)
图5为微位移放大机构结构示意图,微位移放大机构的尺寸远大于柔性铰链的尺寸,可以将运动平台视为伪刚体。由于4组驱动单元均匀分布在运动平台周围,微位移定位平台的不同压电陶瓷的配合,可以让运动平台产生x方向或y方向的位移或绕z轴旋转。
根据微位移定位平台结构特点:
1)当F11=F12≠0(或F31=F32≠0)、F21=F22=F41=F42=0时,运动平台产生y方向的位移;
2)当F21=F22≠0(或F41=F42≠0)、F11=F12=F31=F32=0时,运动平台产生x方向的位移;
3)当F11=F21=F31=F41≠0、F12=F22=F32=F42=0时,运动平台绕z轴顺时针旋转;
4)当F11=F21=F31=F41=0、F12=F22=F32=F42≠0时,运动平台绕z轴逆时针旋转。
Fij(i=1,2,3,4;j=1,2)为压电陶瓷的输出力,i表示第i个驱动单位,j表示左侧或右侧的压电陶瓷。驱动单元1如图6所示,由外框(图7)和微位移放大机构(图5)两部分组成。由于各组驱动单元是相同的,因此可以取驱动单元1中的微位移放大机构进行分析。

图6 分析模型

图7 外框
当图6两侧的压电陶瓷同时工作时,运动平台向y轴正方向运动,分别对外框和放大机构做受力分析,F11和F12的力矩M1和M2使外框产生挠度f2,当F11,F12,M1和M2单独作用时,外框产生的挠度分别为f21,f22,f23和f24。图8是外框的简化模型,由于外框右侧固定在微位移定位平台的底座上,因此选取外框中间位置的挠度值为外框的挠度值。利用叠加法计算外框机构的中间挠度,采用能量法进行外框受力分析。在外框的中间位置施加一个垂直向上单位力F,受力分析如图9所示。
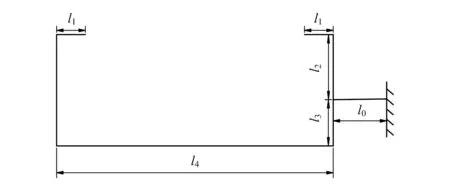
图8 外框简化模型

图9 受力分析图
根据莫尔积分的图形互乘法,由图9中的F11单独作用得到f21:
(8)

同理,由图9中的F12单独作用得到f22;由M1单独作用得到f23;由M2单独作用得到f24。
根据表1给出的尺寸,得到外框的中间部分的挠度为:f2=f21+f22+f23+f24=12.83×10-6m,表中L为驱动单位两侧输出端的距离。

表1 微位移定位平台的尺寸参数 单位:mm
驱动单元的放大机构由二级放大机构、折叠弹片和压电陶瓷组成,由于放大机构为左右对称结构,左侧受力和右侧受力情况类似,因此取左侧进行受力分析。F11和F12使放大机构的输出端产生挠度f1,当F11或F12单独作用时,外框产生的挠度分别为f11和f12。简化左侧放大机构,在输出端的位置施加向上的单位力F,受力如图10所示。

图10 受力分析图
计算方式与式(8)相同,根据表1的尺寸,最终得到二级放大机构的挠度即整个驱动单元左侧部分的挠度为:f1=f11+f12=8.2×10-6m。
由于微位移定位平台结构的对称性,因此微位移定位平台中运动平台向y轴负方向、x轴正方向和x轴负方向运动时挠度的计算方法与上述方法相同。
当微位移定位平台绕z轴旋转时,微位移放大机构将发生形变,故忽略外框的形变。根据θ=arctan(f1/L),得到运动平台绕z轴旋转的角度,根据表1和式(8)的计算结果得到θ=arctan(f1/L)=0.021°。
3 微位移平台的有限元分析
在三维建模软件中建立微位移放大机构的模型并将其导入有限元分析软件中,材料选择65Mn弹簧钢,其基本参数为:杨氏模量E=2.1×1011Pa,密度ρ=7.81 g/cm3,泊松比ν=0.22。微位移放大机构通过柔性铰链与运动平台连接,且在x,z方向上的位移较小,可以忽略。
在微位移二级放大机构左侧输入端输入30 μm的位移,得到微位移放大机构的输出位移如图11所示。由式(7)得,最大位移为114.94 μm,将微位移二级放大机构在y方向上理论和仿真结果进行比较,最大偏差为10.5%。
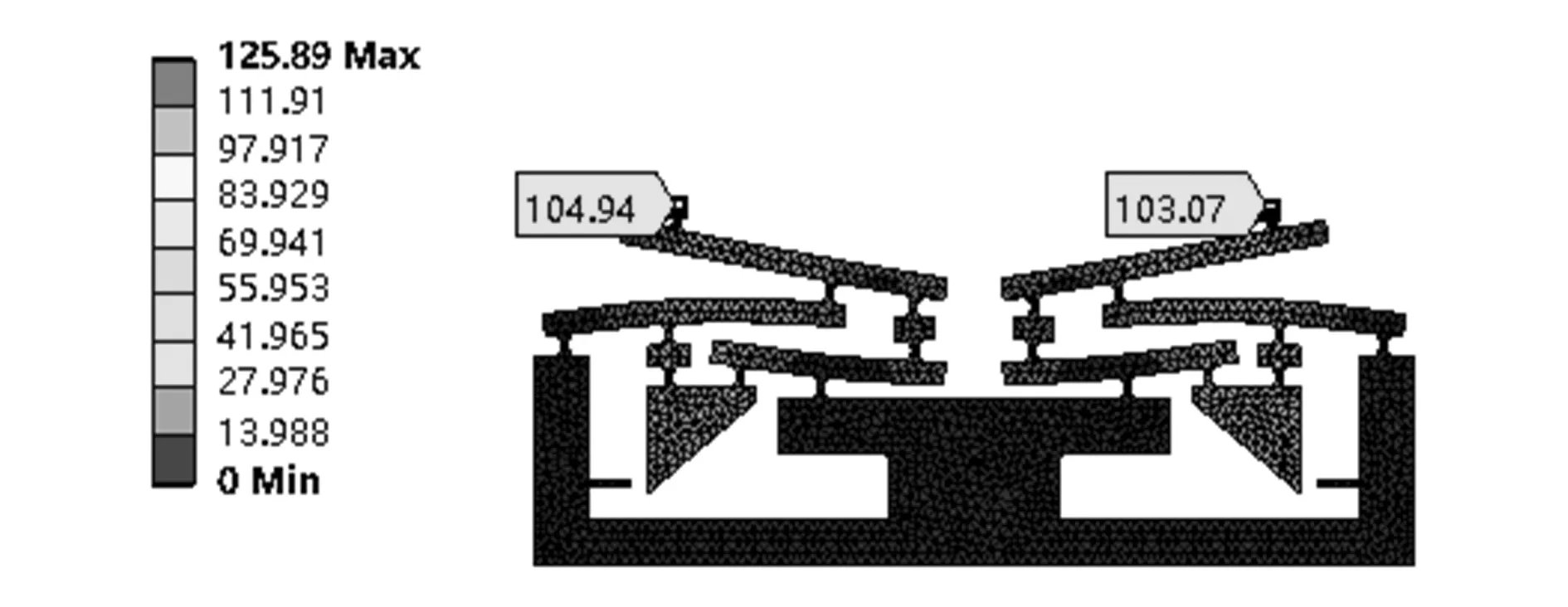
图11 微位移左侧二级放大结果
整个微位移定位平台的尺寸为220 mm×220 mm,中间运动平台的尺寸为70 mm×70 mm。在软件中建立微位移平台的模型,并对模型进行简化,然后将其导入有限元分析软件中。对微位移定位平台施加约束。经计算得到x方向的位移如图12所示,y方向的位移如图13所示。由于在有限元分析软件中无法直接测量运动平台绕z轴旋转的角度,因此检测运动平台下面两个圆孔在x方向的位移,以此来推导出平台的旋转角度,如图14所示。

图12 x方向上的位移 图13 y方向上的位移 图14 旋转角度结果
表2为理论计算和模型仿真的结果,将微位移定位平台在x方向和y方向的理论和仿真运动行进行程比较,位移的最大偏差分别为10.9%和13.8%,绕z轴转角的最大偏差仅为1%。超精密加工中微进给工作台[12]的最大行程为16.3 μm,位移精度要求小于0.1 μm,本文所提出的三自由度微位移定位平台x方向和y方向的行程范围均为-21.03~21.03 μm,位移精度为10 nm,完全满足超精密加工中微进给工作台的要求。除此之外,还能提供-0.021°~0.021°的转角,转角精度为3.6″。

表2 微位移定位平台理论结果与有限元仿真结果
4 结束语
针对超精密加工微位移的技术要求,设计了一种基于压电陶瓷驱动和柔性铰链三自由度微位移平台。本文设计的微位移平台可以实现x,y方向的移动或绕z轴旋转运动,采用了楔形块机构和微位移放大机构,使整个微位移平台的体积较小,平台输出的位移更大。
采用几何闭环约束方程,分析了二级放大机构,得到了二级放大机构输入和输出之间的关系。由于压电陶瓷只能产生单一方向的位移,因此采用了对称结构,这种设计可以使运动平台在x,y正方向或负方向移动或绕z轴顺时针或逆时针旋转。微位移定位平台的输出位移精度和运动行程很大程度上都由压电陶瓷的输出位移和杠杆机构放大倍数所决定,选择输出位移较大的压电陶瓷或采用放大倍数更大的杠杆机构可以实现更大位移或转角的要求。本文设计的三自由度微位移平台结构也为杠杆机构、柔性铰链及楔形机构在其他装置的应用提供了参考。
