基于虚拟仿真的体育教学实训平台设计
2022-04-20张洁张楠
张洁, 张楠
(1.陕西中医药大学, 体育部,陕西,咸阳 712046;2.西京学院,机械工程学院,陕西,西安 710123)
0 引言
虚拟现实技术是一种计算机系统融合计算机的软件技术和硬件技术创建并体验的虚拟世界,通过提高虚拟世界的逼真性,让体验者完全融入到其中,体验者不受到空间和时间的限制[1]。虚拟系统在实际应用过程中存在多种输出形式和输入能力,可以同时进行碰撞检测和交互等。国外的大学课堂已经引入了虚拟现实技术,但虚拟现实技术在国内教学领域中的起步较晚,在技术上与国外水平存在一些差距[2]。将虚拟现实技术应用在教学实训平台中可以提高教学效果和质量。
文献[3]提出基于多媒体技术的教学实训平台设计方法,硬件部分由管理员界面和系统用例图组成系统框架,软件流程为后台管理员工作流程以及出错处理流程,完成教学实训平台的设计,该方法在平台设计中的教学路径较为单一,导致教学效果较差。文献[4]提出了跨学科教学理念设计教育平台的开发,整合了早期开发的机器人系统产品系列架构的发现作为参考,开发的机器人系统分为不同的模块,并将这些模块附加在设计教育平台上,通过CAD、PDM 和 FEM 软件提高学生的使用技能。该方法没有在教学实训平台中设计多路径教学算法,存在教学质量低的问题。
为了解决上述方法中存在的问题,提出基于虚拟仿真的体育教学实训平台设计方法。
1 体育教学实训平台设计
基于虚拟仿真的体育教学实训平台由4个部分构成。
1.1 平台逻辑架构
体育教学实训平台的逻辑架构如图1所示。

图1 体育教学实训平台逻辑架构
硬件层包括Kinect设备和运行程序的主机,是开发体育教学实训平台的基础。利用客户端在表现层中可以实现体育教学实训平台的交互[5]。数据层主要为体育教学实训平台的运行提供模板动画数据和动作信息数据库。业务层中包括动作评估、动作信息查看、用户数据获取和模板动作动画。体育教学实训平台的底层处理逻辑为应用服务层,包括2个部分,分别是日志管理和数据流交换[6]。
用户登录体育教学实训平台的流程如图2所示。
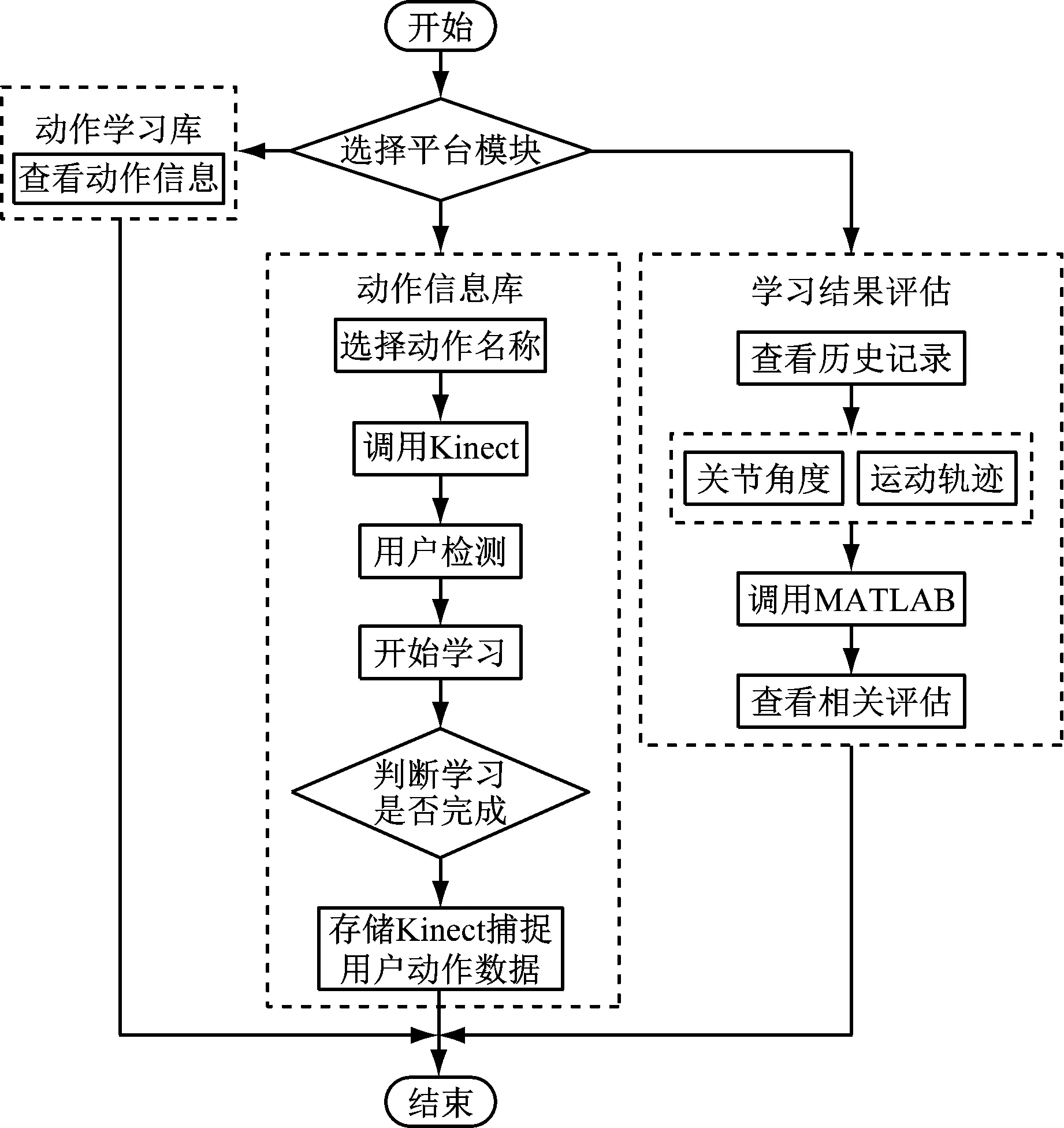
图2 体育教学实训平台流程图
1.2 动作信息数据库设计
将具有执行命令速度快、简单有效和处理多条记录等优点的MySQL关系型的数据库应用在体育教学实训平台中,开源数据库是不存在任何费用的,根据自身需求开发人员可以修改数据库[7]。
数据规范表中的实验数据均存储于体育教学实训平台的动作信息库中,在动作信息数据库中设计概念模型时,分别将规范表中的副标题和主标题作为设计属性和实体,在体育教学实训平台的设计过程中自动生成数据表,并在数据表中录入采集的数据[8]。动作信息数据库是体育教学实训平台查看动作详细信息的来源。
1.3 功能模块设计
体育教学实训平台主要包括学习动作评估、动作信息、用户数据采集和模板动作动画等4大模块。上述模块在体育教学实训平台中互相关联且功能独立,模块在体育教学实训平台中的关联关系结构如图3所示。

图3 模块关联图
动作信息模块的主要功能显示读取动作信息库、MySQL与Unity3D数据库通信、动作数字化元数据规范表中的内容。Vicon动作捕捉系统在工作过程中获取的动作数据在体育教学实训平台中通过模板动作动画模块进行显示,在实验阶段对采集的数据进行处理,将其转化为.fbx格式数据可以直接被Unity使用;Mecanim动画系统利用Unity3D技术实现角色模型匹配,在动作学习库中实现模板动作教学,在动作信息库中实现信息查看。用户数据采集模块在体育教学实训平台中与Kinect进行通信,采集用户动作数据,并在Excel中写入用户关节点对应的空间坐标数据,并在文件夹中保存数据。学习动作评估模块在体育教学实训平台设计中的主要作用是评估体育教学结果,利用MATLAB外部程序计算模板动作与用户动作之间的相似性,在比较图形差异的基础上获得用户学习动作的不足并加以改进。
1.4 用户界面设计
分3个部分对体育教学实训平台的用户界面进行设计,包括学习结果评估、动作学习库和动作信息库,如图4所示。

图4 平台界面设计
动作信息库中存在标准动作动画和数字化元数据规范表:在动作信息库中用户可以查看体育教学动作信息;在动作学习库中用户可以选择体育教学内容进行学习。学习动作评估在体育教学实训平台中的主要内容是对比模板动作和用户动作,客观评估用户学习效果。
2 多路径教学方法
基于虚拟仿真的体育教学实训平台设计方法采用双层隐马尔科夫链实现多路径教学。
通过五元组λ=(N,Ml,A,B,π)描述隐马尔科夫链,其中:N描述的是马尔科夫链中存在的状态数量;Ml描述的是各个状态在五元组中包含的观测事件数量;π=P[q1=j]描述的是初始概率分布,其中P为j维状态下的q1初始概率的分布向量;B={bj(k)}是观测事件ot在当前状态为j时取vk的概率构建的混淆矩阵,bj是j时刻的概率;A={aij,aij=P(qtn+1=j|qtn=i)}描述的是五元组中存在的概率转移矩阵N×N。
基于虚拟仿真的体育教学实训平台设计方法构建的双层马尔科夫HMM如图5所示。
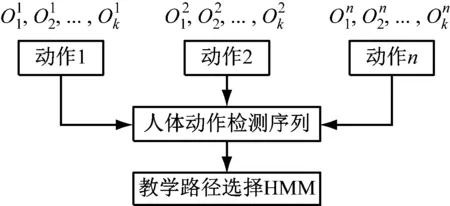
图5 双层马尔科夫HMM
动作序列中存在的片段动作都对应着一个动作识别模块。设o(t)代表的是底层识别观察序列,可通过式(1)进行描述:
o(t)={o1(t),o2(t),…,oN(t)}
(1)
式中,oi(t)表示动作在辨识结果中对应的数字编号。
在离散HMM模型中修改后向和前向变量公式:
(2)
(3)
式中,βt表示t时刻HMM模型在后向算法中观察部分观察序列对应的输出概率,of表示观察序列中存在的变量,at表示t时刻HMM模型在前向算法中的某状态下观察序列对应的输出概率。
利用式(4)重新估计混淆矩阵B:
(4)
式中,correct(j)表示动作正确次数在动作识别序列中对应的期望值,correct(kf|j)表示动作序列中的动作在sj教学内容下的正确次数。
不同的教学内容构成上层马尔科夫链,教学内容片段和分支节点在实际操作过程中需要教学人员设定。该内容片段可能是实时连线答疑、细节动作强化训练或文字、语音、视频资料等知识补充。上个教学内容片段在教学过程中的教学效果是判断是否进行该教学内容片段的决定性因素。细节动作的正确率是评价的主要内容,在下层马尔科夫链中实现评估。完成上述内容后,在原始教学路径中继续学习或根据评估结果选择新的教学路径。上一层教学路径示意图如图6所示。
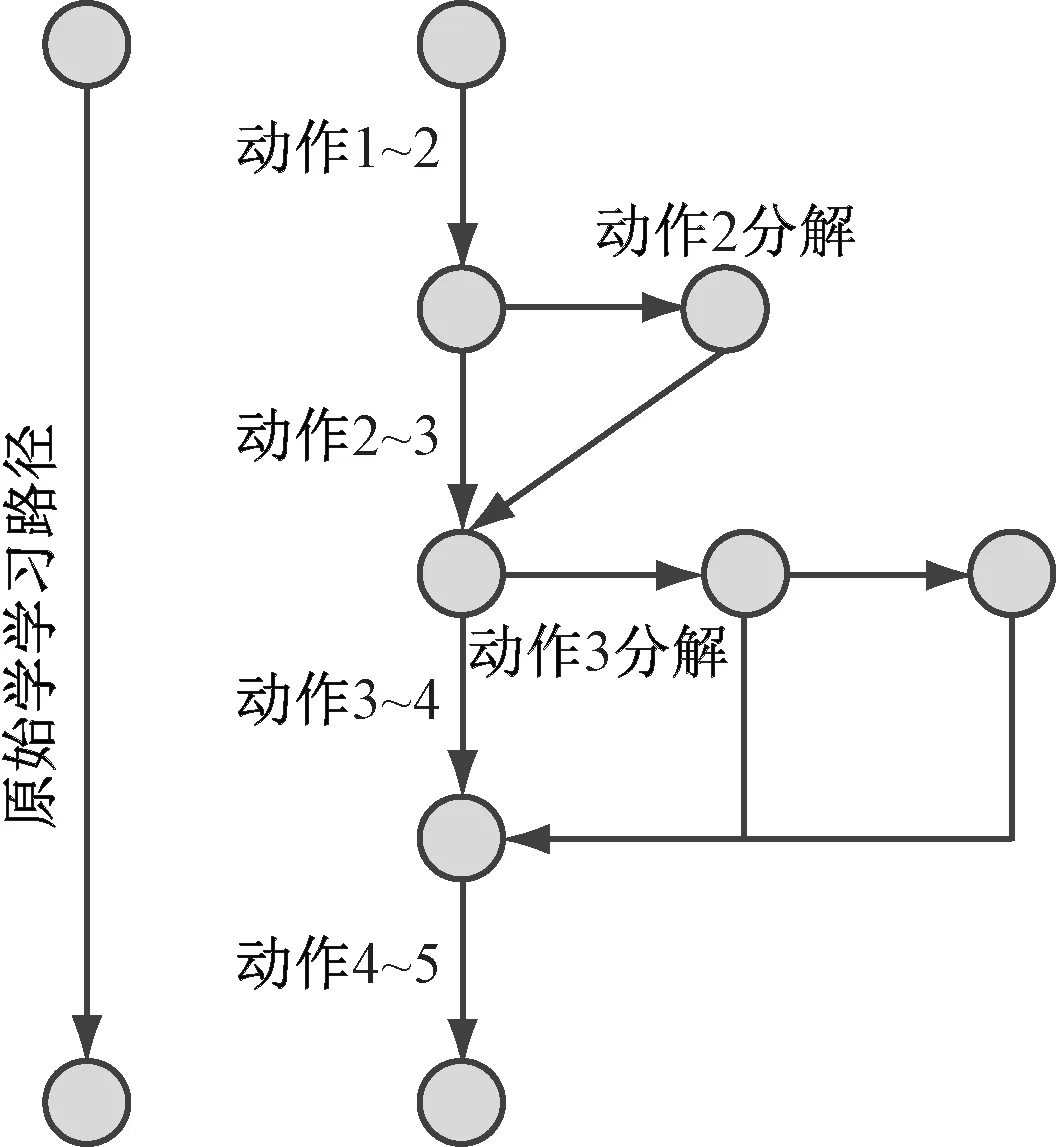
图6 教学路径示例
利用下层马尔科夫链对动作1~动作5进行识别,动作1在识别过程中与教学动作相同,动作2和动作3在教学过程中出现偏差,因此在动作2~3处教学路径跳转到动作2分解视频,并在动作3~4处跳转到动作3对体育教学视频进行分解,为学习者选择新的学习路径。
3 实验与分析
为了验证基于虚拟仿真的体育教学实训平台设计方法的整体有效性,需要对基于虚拟仿真的体育教学实训平台设计方法进行测试。本次测试的实验环境如下。
操作系统:Windows。
CPU:Inter Core i5 3.2 GHz。
内存容量:8 GB。
测量设备:被动光相机、主动光相机、室外光/双目相机。
为了验证体育教学实训平台的有效性,在关节角度和运动轨迹2个方面对基于虚拟仿真的体育教学实训平台设计方法(本文方法)、基于多媒体技术的教学实训平台设计方法(文献[3]方法)和跨学科教学理念设计教育平台的开发方法(文献[4]方法)进行评估。
采用上述测量设备能够精准地测量出人物动作,方便室内定位,保证了测量数据的准确性。本文方法采用Excelr软件、visio软件、GitMind软件。文献[3]方法采用基于后台管理员工作流程以及出错处理流程开发的教学实训平台的设计软件。文献[4]方法采用CAD、PDM 和 FEM 软件。
以hand_right关节点为例,选取测试者在不同教学实训平台中的运动估计,进行10次测试,分别取第1次、第5次、第10次的测试数据进行对比分析,并与模板数据进行对比,分析不同方法的练习结果误差。测试结果如图7所示。
分析图7中的数据可知:测试者在本文方法构建的实训平台中,随着训练次数的增加运动轨迹逐渐接近模板数据;测试者在文献[3]方法和文献[4]方法构建的实训平台中,随着训练次数的增加运动轨迹也有所发生变化,但与模板数据曲线之间的差距较大。

图7 运动轨迹对比图
以elbow_right关节点为例,通过评估测试者的关节角度对练习结果进行分析,结果如图8所示。
分析图8中的数据可知,随着训练次数的增加,测试者在3种方法构建的实训平台中的关节角度逐渐接近模板数据,但对比3种方法的测试结果可知,测试者在本文方法构建的实训平台中练习后的关节角度与模板数据之间的差距最小,在文献[3]构建的实训平台中练习后的关节角度与模板数据之间的差距最大。本文方法通过构建平台逻辑架构,设计动作信息数据库、功能模块、用户界面,实现了体育教学实训平台的设计,并采用多路径教学方法。相比较另外2种方法,本文方法的教学路径较为丰富,教学内容质量高。
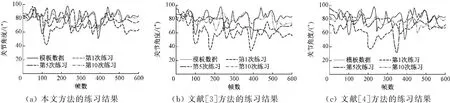
图8 关节角度对比图
4 总结
在仿真技术和多媒体技术融合的基础上,虚拟现实技术可以形成一种虚拟环境,在教学实训平台中的应用较为广泛。目前体育教学实训平台设计方法存在教学效果差的问题,提出基于虚拟仿真的体育教学实训平台设计方法,在平台设计过程中通过双层隐马尔科夫链实现多路径教学,解决了目前方法中存在的问题,为教学实训平台的发展奠定了基础。
