工业机器人、高技能劳动集聚与地区工业集聚
2022-04-20魏嘉辉顾乃华
魏嘉辉 顾乃华
一 引言及文献综述
自20世纪90年代我国建立社会主义市场经济体制以来,第三产业对经济增长的作用越来越突出,逐渐确立了以第三产业发展提高城市竞争力的城市建设方针,而后中国城市群逐渐形成中心城市服务业发达而外围城市工业集聚的功能分布格局(张学良,2013)。观察中国工业分布格局演化历史发现,20世纪60年代城市工业化背景下,中国工业发展对资本的需求远高于对劳动力的需求,其地理分布集聚原因在于政府干预下的资金导向;20世纪90年代中心城市建设背景下,中国工业发展更依赖于商品市场需求,使交通服务和土地成本成为工业选址的重要考量因素。而21世纪以来,中国人口红利不断下降,人工智能、机器人等技术不断涌现,对中国工业生产方式带来了重大变革,使工业对交通、物流等传统生产性服务和劳动力的依赖程度下降,中国产业区域分布格局迎来又一次转移和演化。
工业集聚有利于加强企业合作交流、促进要素流动和形成良性竞争格局,以实现生产效率、技术进步和创新等规模经济效益,对地区经济发展有着重要的影响,是现代中国工业发展的重要特征(Krugman,1991;Ciccone和Hall,1996;陈建军和胡晨光,2008)。基于城市“中心服务-外围制造”的格局,过去不少文献研究了服务行业发展对工业集聚的影响。周伟等(2020)实证检验发现,交通运输的发展和金融利率的高低都会对工业集聚带来显著影响;贺灿飞等(2010)研究认为,产业联系强的和规模经济显著的产业更容易受交通密度的影响而形成区域上的集聚。也有相当部分文献强调了政府干预和公共管理服务对产业集聚的作用(李世杰等,2014;邱风等,2015;徐鹏杰和黄少安,2020;胡兆廉等,2021;唐晓华和李静雯,2021)。已有文献集中从交通运输服务、金融服务和公共服务等角度讨论了中心城市对工业集聚产生的影响,但较少关注技术和劳动力优势对工业选址发挥的重要作用。韩峰和柯善咨(2012)研究认为,工业生产活动对劳动力、资金、设备和国外技术等要素需求以及要素本身集聚产生的外部性作用对中国工业集聚的地理分布格局形成有巨大作用。严立刚和曾小明(2020)研究认为,人力资本的空间差异显著促进了产业地理集聚,是中国东部产业难以转移到中西部的重要原因。因此,随着全球价值链嵌入、分工和经济动能的转化,中国工业发展逐渐减少对劳动力数量的依赖,转为增加对劳动力质量、知识和专利技术等要素的需求。
相较于低技能劳动,高技能劳动集聚更能产生外部效应并推动中国工业地理分布格局演化。而随着人工智能、大数据等智能技术的发展和完善,工业生产的部分流程由机器人技术替代,使工业选址更注重技术设备上的规模经济效益。作为偏向型技术进步的代表,工业机器人与高技能劳动存在天然的互补关系,二者对工业集聚的作用并非割裂存在,更可能表现为相互促进和相互依赖的影响关系。在以上背景下,本文重点考察工业机器人应用、高技能劳动集聚以及二者交互关系对工业集聚的影响。相较于过去文献在中国工业既定生产模式的前提假设下研究中国工业地理分布成因,本文立足于智能时代下的工业生产模式更替,将工业机器人渗透、高技能劳动集聚和工业集聚纳入同一分析框架,强调了工业机器人、高技能劳动集聚及二者交互作用对工业地理分布的影响。接下来的内容安排为:首先通过理论分析提出工业机器人、高技能劳动集聚影响工业集聚的假设;然后,通过构建实证模型展开实证检验;最后是结论与政策启示。
二 理论分析与假设
(一)机器人与地区工业集聚
新经济地理理论在不完全竞争和规模报酬递增的假设下,把交通运输成本、规模经济效应和知识等马歇尔外部性纳入分析框架,解释了工业部门集聚的原因(Krugman,1991)。然而,随着劳动力流动增加和区域经济联系日益密切,中国制造业并没有表现出因劳动力成本优势变化而从东部沿海地区往中西部地区大规模转移的现象(韩峰和柯善咨,2012)。传统的劳动力比较优势理论已然无法解释中国制造业集聚的趋势。21世纪以来,随着经济的发展,人工智能、机器人、5G等智能技术不断进步和完善,对中国制造业的发展带来了重要影响。全球机器人协会数据显示,中国工业机器人保有量从2006年3400台快速增长至2017年的38万台,使其成为了制造业的重要生产要素。
不少研究发现,机器人与劳动力存在显著的替代关系。Frey和Osborne(2017)从职业技能匹配的角度展开实证研究,认为美国目前有近一半的工作岗位存在被机器人替代的风险。闫雪凌等(2020)基于IFR工业机器人数据和中国制造业从业数据实证发现,工业机器人保有量每增长1%会减少约4.6%的就业岗位。“机器换人”不仅变革了中国制造业的生产方式,也给地区劳动力比较优势带来了巨大冲击,因而对制造业地区分布产生重要影响。而由于技术具有规模经济作用和创新的外部性,对产业集聚有促进作用(Cardona et al.,2013;Gordon和Sayed,2020)。工业机器人作为人工智能技术的代表,容易构建机器人要素的地区比较优势,为生产部门发展营造地区专业化环境,并以此形成以机器人为核心要素的产业分布格局。因此,在机器人的“替代效应”作用下,本文认为城市工业部门集聚程度与工业机器人渗透程度有密切关系,即地区工业机器人渗透水平越高,工业分布越集聚,由此引出假设H1。
H1:工业机器人的“替代效应”冲击了地区原有劳动力成本优势,并塑造了技术上的比较优势,进而有利于地区工业集聚。
(二)工业机器人、高技能劳动与地区工业集聚
在机器人技术应用的背景下,一些研究发现,工业机器人与人类劳动并不只有替代关系。Hémous和Olsen(2014)从工资收入视角构建增长模型,发现智能技术挤出了低技能劳动收入,但也促进了高技能劳动的工资收入。为了解释这种现象,Acemoglu和Restrepo(2018a)构建了一个任务模型,把生产活动列为一系列任务的集成,而工业机器人技术应用在替代人类完成较低任务序列的同时,也会创造出新的工作任务,使得工业机器人与人类劳动同时存在替代和互补关系。这种互补关系体现在两个方面:第一为直接岗位需求关系,主要为围绕工业机器人设备而创造的操作、维护、研发、程序编写、管理等工作岗位;第二是间接岗位需求作用,当工业机器人应用发挥规模效应、技术优势而节约成本时,工业企业就能把更多的资源投向研究开发、管理和经营销售上。对比发现,工业机器人发挥替代作用时,更多的是对重复性生产任务的替代,使其对低技能劳动产生更大的挤出作用,而当工业机器人发挥互补作用时,创造的工作岗位,如研发、管理等,更需要高技能劳动的支持。
已有相关研究认为,地区人力资本集聚能够对生产效率、创新和收入等产生正向外部性作用(陈得文和苗建军,2012;鲁元平等,2017;黄容霞等,2021;王佳和徐玮,2021)。这种外部性影响促进了产业对高技术人才的需求,使劳动力质量优势成为影响地区工业集聚的重要因素。而工业机器人应用的“互补效应”将扩大工业企业对高、低技能劳动的需求差距,降低地区原有劳动力成本优势,并逐渐形成劳动力质量优势的工业分布格局。由于地区劳动力质量优势主要体现在高等教育资源上,本文提出假设H2。
H2:工业机器人与高技能劳动的互补关系促进了工业企业对高等教育的需求,进而形成以高等院校分布为中心的工业集聚趋势。
三 实证检验
(一)模型构建
基于以上分析,本文将高技能劳动和工业机器人纳入同一模型框架,以探究二者对工业地理分布的影响。本文采用以下策略构建实证模型:第一,考虑到工业分布与地区自然资源、环境和人文等不随时间变化的因素相关,也可能与随时间变化的外部环境、金融市场变动有关,本文实证模型均同时考虑地区和时间的双向固定效应,以缓解内生性问题;第二,通过构建交互项的方式探究工业机器人与高技能劳动的互补作用机制;第三,异质性检验通过工业机器人、高技能劳动与各调节变量组合三重交互的形式展开。模型具体设定为:
indgeo
=α
robotlab
+α
sch
+α
X
+μ
+λ
+ε
(1)
indgeo
=β
robotlab
×sch
+β
robotlab
+β
sch
+β
X
+μ
+λ
+ε
(2)
其中,下标i
和t
分别表示地区和年份;indgeo
为工业集聚程度;sch
表示高技能劳动集聚程度,以地区高等院校分布衡量;X
为控制变量;μ
和λ
分别表示地区固定效应和时间固定效应;ε
为估计误差;α
、β
为回归系数。系数α
和α
分别检验了工业机器人、高技能劳动集聚对工业集聚的整体效应,按前文分析,预测二者同时表现出显著的正向关系。而系数β
检验了工业机器人对高技能劳动集聚促进工业集聚的调节效应。按照理论分析,由于工业机器人与高技能劳动间为互补关系,地区工业机器人渗透水平越高,高技能劳动的工业集聚效应越强,为此,预测系数α
和β
同时显著为正。为了进一步分析其中机制,本文从多个角度分析了工业机器人调节效应的异质性作用,并提出以下三重交互实证模型:
indgeo
=γ
robotlab
×sch
×mod
+γ
robotlab
×sch
+γ
sch
×mod
+γ
robotlab
×mod
+γ
robotlab
+γ
hhi
_sch
+γ
mod
+γ
X
+μ
+λ
+ε
(3)
其中,mod
(m
=1, 2, …)分别表示制造业结构、财政干预程度、国有化水平、交通可达性、老龄化程度、对外开放程度等调节变量,系数γ
指向了其中的调节作用。(二)变量设定与说明
1.被解释变量
测量宏观层面上的产业集聚程度方法主要包括赫芬达尔指数、区位熵、空间基尼系数、R-G指数等(张琳彦,2015)。一方面,由于中心城市往往提供服务功能而外围城市提供生产制造功能,高等院校和工业分布具有“中心-外围”的城市空间关系。但随着生活成本的提高和交通网络的完善,高校集中与工业集聚可能存在跨城市的促进关系,即高校集中在中心城市而工业集聚于周边城市,此时高校分布与工业分布在地理空间上并不完全重合,而具有在中心城市和外围城市分别集聚的特征。另一方面,IFR提供的机器人数据为国家-行业层面数据,参考Acemoglu和Restrepo(2017a)等的方法,通过分工业行业就业数据能把工业机器人按权重分配到中国省级层面,但由于缺少城市层面的分工业行业从业数据,现有数据并不支持分配到城市层面,因而以城市层面区位熵衡量工业集聚程度的方法不适用。综上考虑,本文通过构建赫芬达尔指数的方式衡量地区工业集聚程度。具体计算为:

(4)
其中,Op
表示省份i
、城市j
在年份t
的工业产值,Op
表示省份i
在年份t
的工业产值。产值的赫芬达尔指数以省份内部各城市的工业产值差距为基础度量了省份工业集聚程度,该指标越大,说明工业在省内分布越集中,反之则越分散。2.解释变量
本文参考Acemoglu和Restrepo(2017a)的工业机器人渗透率水平构建方法,以及王文等(2020)的行业匹配方法,构建工业机器人渗透率指标:

(5)
其中,robotlab
为省份i
时间t
工业机器人渗透率;robot
为行业u
时间t
的工业机器人保有量;E
表示省份i
行业u
时间t
的从业人数占全部从业人数的比例。工业机器人渗透率指标是按从业人数加权平均的每十万人工业机器人保有量,地区工业机器人数量与从业人数的比值越高,工业机器人渗透率指标越高。工业机器人渗透率指标的构建依赖于行业机器人数量于不同省份平均分配的假设,在稳健性检验中,本文辅以进口工业机器人冲击替换工业机器人渗透率进行检验。具体计算上,进口工业机器人冲击以中国海关进出口数据中包含“机器人”字样的工业商品金额为计算基础,在汇率平价后与地区GDP的比值衡量。本文研究工业机器人与高技能劳动互补对工业集聚的影响,由于高技能劳动集聚与产业集聚具有很强的互为因果关系,作为解释变量放入模型可能产生内生性问题,为此,本文以地区高等院校分布作为解释变量。具体计算上,以省份内部各城市高等院校数量为计算基础,按照式(4)的方法构建关于高校分布的赫芬达尔指数,指数越大则说明省内高校分布越集中,反之越分散。
3.调节变量与控制变量
控制变量方面,参考陈柯等(2020)的研究,分别从对外贸易、政府行为、新经济地理理论、马歇尔外部性和劳动力比较优势五个角度设立,具体包括:(1)人均受教育程度,以地区人均受教育年限衡量。(2)对外开放水平,以汇率平价的进出口总金额与地区GDP的比值衡量;(3)财政干预程度,以地区财政支出总额与GDP的比值衡量;(4)国有化水平,以地区年末国有企业从业人员占全部从业人员的比例衡量;(5)交通可达性,以各地区公交线路长度与实有道路长度的比值衡量;(6)老龄化程度,以地区养老抚养比衡量。此外,考虑到较少随时间变化的地理因素、人文环境和自然资源禀赋对产业集聚的影响,以及股票、期货等市场不确定性发挥的作用,本文所有回归模型均控制地区固定效应和时间固定效应。
在异质性检验中,除了加入与以上控制变量的交互项外,本文还加入了地区制造业高级化程度作为调节变量,检验高技能劳动集聚影响工业机器人工业集聚作用的机制。具体地,参考张其仔和李蕾(2017)的方法,将行业代码为27、34-41的行业划分为技术密集制造业,以技术密集制造业产值占全部制造业产值的比例衡量。
(三)数据来源与描述性统计
本文的研究数据为2006-2017年省级和城市层面面板数据,具体地,城市工业产值和高等院校分布数据来自《中国城市统计年鉴》;各省份分工业行业产值数据来自《中国工业统计年鉴》;工业机器人保有量数据来自国际机器人联合会;地区劳动力结构、地区智能化水平和控制变量构建所需的数据全部来自《中国统计年鉴》、《中国劳动统计年鉴》和各省份统计年鉴;稳健性检验中的进口工业机器人冲击数据来自2011-2017年中国海关进出口数据;汇率数据来自中央银行网站。各变量的描述性统计如表1所示。

表1 描述性统计
(四)基准回归
基于式(1)和式(2),同时考虑地区固定效应和时间固定效应得到表2回归结果。列(1)和列(2)为基准回归结果,无论是否加入控制变量,高技能劳动集聚程度、工业机器人与工业集聚均呈显著正向关系,验证了假设H1。一方面,高技能劳动集聚带来的知识扩散效应和促进企业竞争显著推动了工业地理集聚,说明能否获得高技能劳动是工业选址的重要影响因素;而另一方面,工业机器人作为资本要素对生产活动存在规模效应,而为了方便设备的租赁和技术交流,工业企业分布也趋向于集聚。列(3)和列(4)为加入工业机器人和高技能劳动集聚程度交互项的回归结果。可以发现,无论是否加入控制变量,高技能劳动集聚程度与工业机器人交互项对工业集聚有显著正向作用。由于工业机器人与高技能劳动存在互补关系,二者相互作用共同促进了工业集聚,使地区工业机器人渗透程度越高,高技能劳动集聚的工业集聚效应越强,由此验证了假设H2。
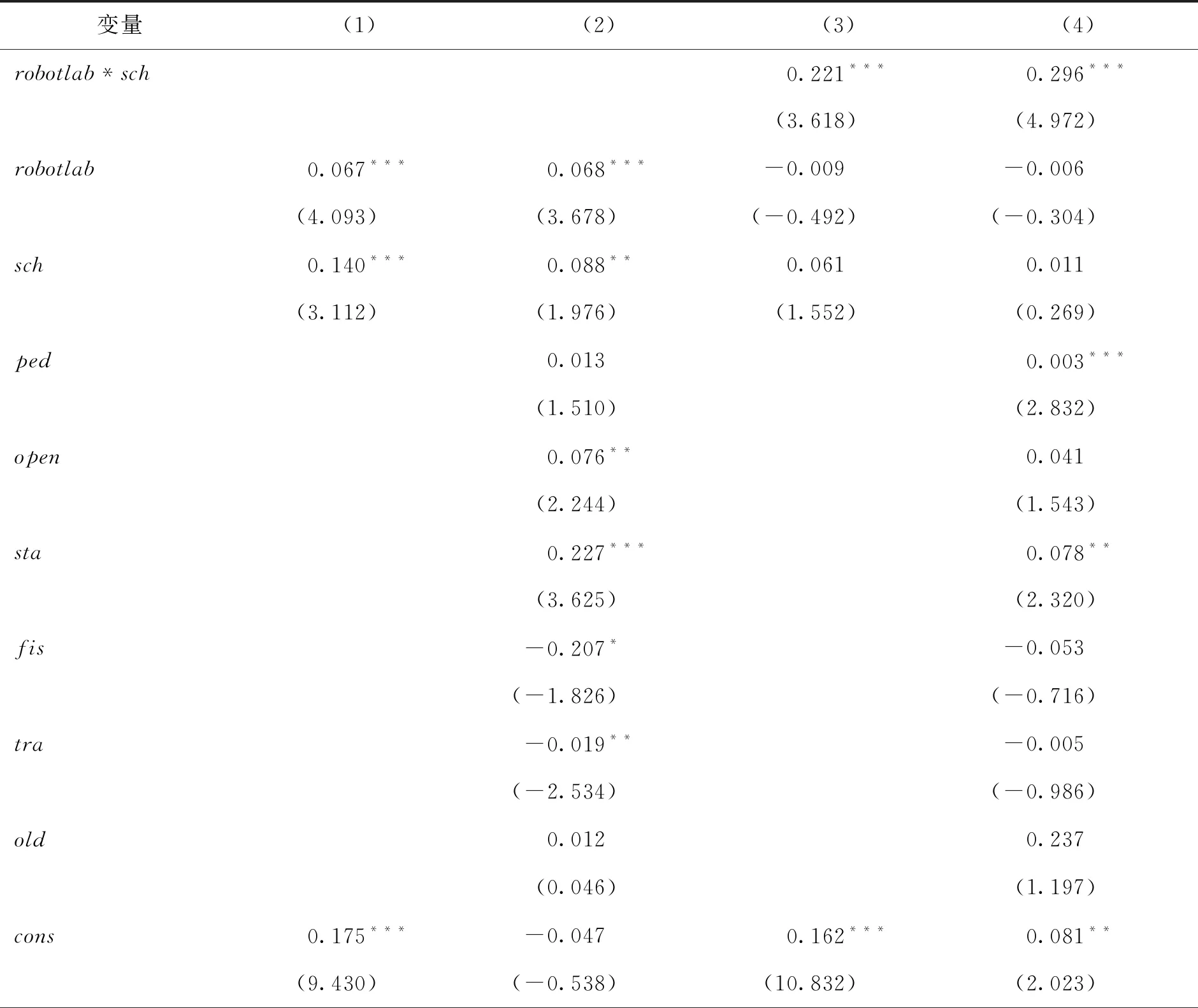
表2 工业机器人、高技能劳动集聚与工业集聚
此外,观察列(2)控制变量的系数发现:(1)地区对外开放水平越高,国外商品市场需求越高,同时国外资本、技术等要素流入也越多,而商品市场和外国投资都具有促进工业集聚的作用(冼国明和文东伟,2006);(2)地区企业国有化水平对工业集聚存在显著的正向作用,说明国有企业相较于民营企业在地理分布上更聚焦;(3)财政干预程度对工业集聚具有显著的抑制作用,说明政府的财政手段一定程度上抑制了工业自然集聚过程,这可能与政府支出偏向于后发地区有关;(4)省份内部交通便利程度与工业集聚呈负相关关系,交通成本越高,企业分布越集中,而地区交通越便利,企业分布越扩散。总体看来,各控制变量对工业集聚的影响与预期一致。

(续上表)
(五)异质性检验
围绕工业“机器人—高技能劳动互补”对工业集聚的正向作用,本文基于式(3)以不同控制变量的进一步交互展开异质性检验,结果如表3所示。相应地,mod
分别对应制造业结构ind
、财政干预程度fis
、人均受教育程度ped
和老龄化程度old
,结果表明:(1)相较于低技术制造业,高技术制造业的生产活动更依赖于智能技术与高技能劳动的互补关系,因而地区制造业结构越高级,二者交互带来的工业集聚效应越强。罗勇和曹丽莉(2005)基于增长核算的方法,分析了中国制造部门分布的动态演化过程,发现中国行业集聚趋势的排列顺序依次为知识密集制造业、资本密集制造业和劳动密集制造业。而本文的研究发现,工业机器人技术对异质性劳动力的不同影响一定程度上解释了以上行业集聚趋势的排列顺序。(2)地区财政干预程度显著抑制了工业机器人与高技能劳动互补的工业集聚作用。唐晓华和李静雯(2021)认为财政分权会通过挤占科教支出抑制制造业集聚,而地方政府财政支出的“重生产而轻科教”一定程度上会降低工业机器人与高技能劳动交互的工业集聚作用。(3)地区整体的受教育水平越高,“工业机器人—高技能劳动互补”的工业集聚作用越强。工业机器人属于偏向型技术,互补作用更多发生在其与高技能劳动之间,因而地区人均学历越高,互补效应越强,而工业集聚趋势越突出。(4)地区老龄化程度、工业机器人和高技能劳动集聚程度的交互项与工业集聚显著正相关。老龄化严重的地区更有引入工业机器人替代劳动力的动机,预期寿命的延长也推动了地区劳动力增加人力资本投资,共同促进了“工业机器人—高技能劳动互补”的工业集聚效应(Acemoglu和Restrepo,2017b;Acemoglu和Restrepo,2018b;陈彦斌等,2019)。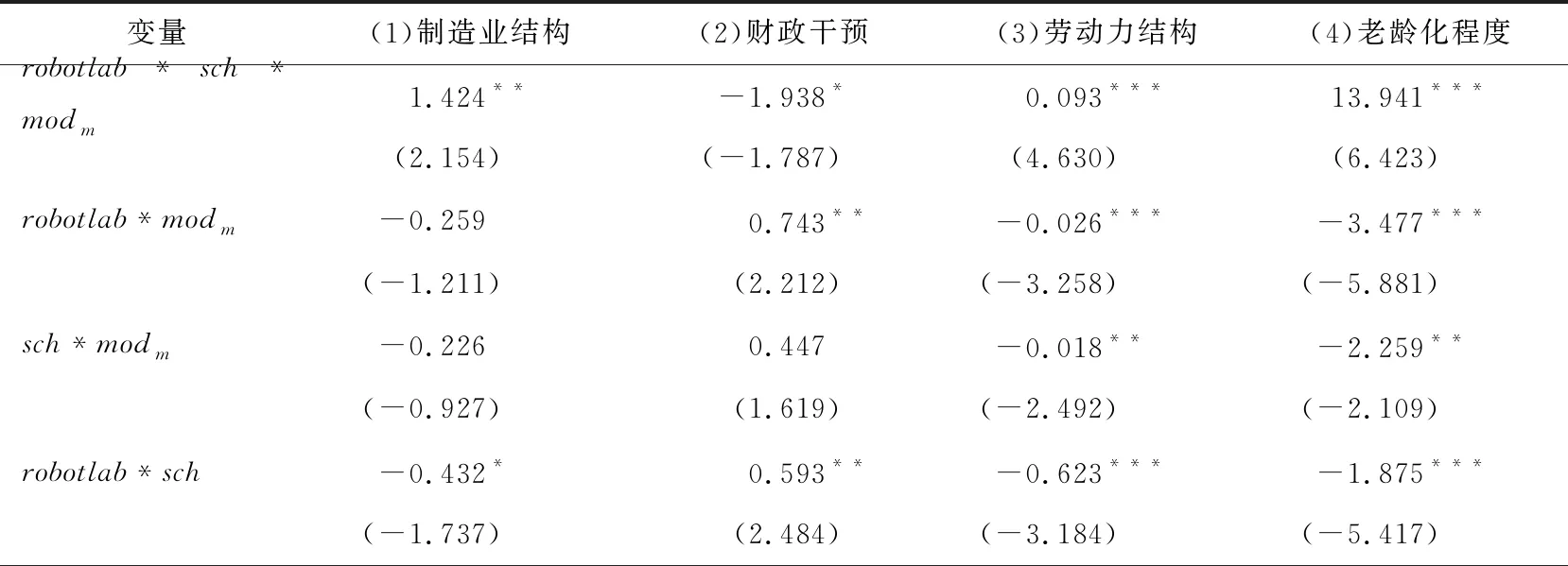
表3 异质性检验
总体看来,由于工业机器人与不同劳动力的异质关系,其与高技能劳动集聚交互带来的工业集聚作用更多发生在技术制造业密集地区、高学历地区和老龄化程度严重地区,而地区“重制造而轻科教”的财政干预一定程度上抑制了以上影响。

(续上表)
表4以样本分组的方式检验了行政区域和时间区间上的异质性作用,列(1)-列(4)分别为以东部地区、中西部地区、2006-2011年、2012-2017年为样本的回归结果。第一,工业机器人与高技能劳动互补的工业集聚作用显著存在于东部地区,而在中西部地区的影响不明显。相比之下,中国东部地区人口密度更大、高校分布更加密集,因而引入工业机器人对劳动力替代的动机、高技能劳动集聚带来的外部性效果更强,共同提高了工业机器人与高技能劳动互补下的工业集聚作用;第二,工业机器人与高技能劳动互补的工业集聚作用在不同时间区间内表现出较强的异质性,2012年以前表现为显著负相关而2012年后为显著正相关。究其原因,可能与早期工业机器人布局对生产效率的促进作用较小有关(Brynjolfsson et al.,2017;陈彦斌等,2019)。2012年以前,中国的工业机器人70%由国外供应商提供,国内工业机器人的研发能力和满足多样性需求的编程能力较为薄弱,因而工业机器人的引入以发挥替代效应为主,此时工业企业选址可能会降低劳动力需求的考虑,使工业分布远离高技能劳动集聚的中心城市,最终使交互项对工业集聚的影响为负(李磊和徐大策,2020)。而2012年以后,随着中国工业机器人技术的进步,其与高技能劳动的互补效应逐渐显现,工业机器人与高技能劳动集聚交互项显著促进工业集聚。考虑到工业机器人与高技能劳动集聚交互作用对工业集聚影响在时间上的异质性,本文猜想高技能劳动集聚对工业集聚的作用可能存在关于工业机器人的门槛作用:在工业机器人引入初期,工业企业为了布局技术设备,可能会增加对高技能劳动的需求以增强对工业集聚的影响;而当工业机器人进入轻度应用阶段,其在生产过程中主要发挥替代作用,降低了企业对劳动力的需求,减弱高技能劳动集聚对工业集聚的作用;而工业机器人渗透率上升到一定程度时,由于规模效应和干中学带来的技术扩张,工业机器人与高技能劳动的互补效应显现,提高了企业对高技能劳动的需求,进而促进高技能劳动集聚对工业集聚的影响。由于分时间段回归需要损失样本容量,因而难以进一步细分时间区间考察以上“先促进、再抑制、后促进”的可能变化趋势,而只能大体得到2012年前后分别负向、正向的影响。为了验证工业机器人渗透率的调节作用,后面进一步构建门槛效应模型展开分析。

表4 地区、时间异质性检验
(六)稳健性检验
本文关键解释变量的构建依赖于行业机器人数量于不同省份平均分配的假设,但实际上,受地区间发展程度、对外贸易情况等因素的影响,工业机器人渗透率的概念未必能准确反映地区工业机器人使用的真实情况,而使回归结果有所偏离。本文通过以下四种方式对基准回归结论展开稳健性检验:第一,进口工业机器人冲击。考虑到中国工业机器人等智能技术尚处于初级发展阶段,本文基于2011-2017年中国海关进出口数据库,以关键字包含“机器人”字样的工业商品金额为计算基础,通过其汇率平价后的贸易金额与地区GDP的比值构建地区进口工业机器人冲击程度,从技术引进的角度考察工业机器人的工业集聚效应。与工业机器人渗透率相比,这一变量为省级层面变量,一定程度上放松了工业机器人在各省份按行业平均分配的假设。第二,考虑到过去工业集聚程度对当前工业分布的影响,为缓解内生性问题,本文运用动态面板模型检验结论的稳健性。第三,为了缓解可能由于互为因果而出现的内生性问题,本文以滞后一期解释变量作为工具变量进行回归检验。第四,为避免异常数据带来的回归结果偏误,本文把工业机器人渗透率、高技能劳动集聚程度和工业集聚程度分别进行前后2%的缩尾处理。总体看来,以上四种检验方法结果显示,工业机器人与高技能劳动互补带来的工业集聚作用依然显著。

表5 稳健性检验
四 进一步研究:关于工业机器人渗透程度的门槛效应检验
考虑到工业机器人与劳动力的异质关系,本文进一步考察高技能劳动集聚影响工业集聚的门槛特征。在工业机器人引入阶段,工业企业为了设备布局而增加对高技能劳动的需求,而在工业机器人应用初期,工业机器人对劳动力的替代效应占优,工业机器人可能抑制了高技能劳动集聚对工业集聚的影响;而当工业机器人渗透程度较高时,工业机器人对劳动力的互补效应占优,可能促进了高技能劳动集聚对工业集聚的作用。为此,构建以下门槛效应回归模型:
indgeo
=δ
+δ
sch
I
(robotlab
≤T
)+δ
sch
I
(robotlab
>T
)+δ
X
+μ
+λ
+ε
(6)
其中,T
为门槛值,δ
为估计系数,I
(·)为指示函数,当满足括号内条件时,I
=1,不满足时I
=0。系数δ
和δ
分别指向门槛值前后高技能劳动集聚程度对工业集聚的影响。
表6 门槛效应自抽样检验
为了检验高技能劳动集聚对工业集聚的作用是否存在关于工业机器人渗透程度的门槛特征,本文首先进行300次重复抽样下的门槛效应检验,结果显示:工业机器人渗透程度在95%置信区间内分别拒绝了不存在单门槛和双门槛特征的假设,但无法拒绝不存在三门槛特征的假设。因此,本文认为高技能劳动集聚对工业集聚的作用存在关于工业机器人渗透程度的双门槛效应。而具体的门槛效应回归结果如表8所示:当工业机器人渗透程度低于0.068时,高技能劳动集聚显著促进了工业集聚;当工业机器人渗透程度小于0.090而大于0.068时,高技能劳动集聚显著抑制了工业集聚;当工业机器人渗透程度大于0.090时,高技能劳动集聚显著促进了工业集聚。围绕工业机器人渗透程度,高技能劳动集聚对工业集聚的影响存在“促进-抑制-促进”的演化关系,这可能由于:在工业机器人最初引进国内时,企业为了布局工业机器人设备而增加对高技能劳动的依赖,进而把高校分布作为企业选址的重要参考因素;当工业机器人成为常规生产要素时,企业发现其对劳动力的替代作用大于互补作用,进而降低了对高技能劳动的需求;当工业机器人投入形成规模时,由于干中学效应,国内工业机器人技术趋于成熟,与高技能劳动互补,对工业集聚产生促进作用。从样本分布看来,2006年有25个省份低于互补效应占优的门槛值,而至2017年仅有西藏地区的工业机器人渗透程度低于门槛值。本文的门槛效应检验再次强调了生产智能化背景下,高技能劳动已然成为显著影响中国工业地理分布的重要因素。

表7 门槛值估计结果

表8 工业机器人渗透程度的门槛效应回归结果
五 结论与政策建议
本文在智能化背景下,把工业机器人、高技能劳动和工业地理分布纳入同一框架,结合理论和实证检验发现:工业机器人通过塑造技术比较优势促进了中国工业集聚;高技能劳动集聚通过产生马歇尔外部性与促进企业竞争提高了区域工业集聚程度;由于工业机器人与高技能劳动的互补关系,地区工业机器人渗透水平越高,高技能劳动集聚对工业集聚的正向效果越大。本文通过一系列异质性检验发现:第一,工业机器人与高技能劳动集聚交互带来的工业集聚作用更多发生在技术制造业密集地区、高学历地区、老龄化程度严重地区和东部地区;第二,地区财政干预一定程度上扭曲了工业机器人与高技能劳动互补下的工业集聚作用;第三,由于工业机器人引进初期互补效应占优、应用初期替代效应占优,而形成规模的成熟时期互补效应占优,工业机器人与高技能劳动互补的工业集聚效应在时间区间上存在较大的异质性,并使高技能劳动集聚对工业集聚程度的影响存在关于工业机器人渗透程度的显著门槛特征。
据此得到的政策启示为:第一,积极扩张高等教育规模,促进工业机器人技术发展,把知识和智能技术视为经济增长的重要推动力,同时致力于寻求工业机器人与高技能劳动更好的融合方式。本文研究发现,工业机器人与高技能劳动的交互作用促进了中国工业集聚,因而关注工业机器人和高技能劳动给经济带来规模效应和马歇尔外部性作用的同时,也要注意二者交互融合对经济高质量发展的正向作用。在技术上,相较于传统工业机器人,应致力于协作机器人的研发和应用,以“人机交互”的生产方式提高生产效率;在教育上,可将部分教育资源往人工智能、机器学习、大数据等方向倾斜,增加相关专业招生人数,以促进智能技术与教育的互补效应。第二,推动校企交互协调发展,同时加快推进工业企业的智能化进程,以发挥高技能劳动集聚的外部作用和实现技术、设备上的规模经济效应。第三,本文异质性检验发现,地区财政干预程度抑制了工业机器人与高技能劳动交互作用下的工业集聚效应,因此,地方政府应协调生产和科教的财政支出比例,促进先进生产技术和高技能人才的耦合协调发展,以更好地发挥技术和知识的互补作用。
