一种新型柔性气缸驱动手爪
2022-04-19宋展宏李小宁
宋展宏,李小宁
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
工业自动化生产线上常用各种手爪作为物品的抓取、搬运装置。这些手爪一般采用电机、液压缸、气缸的驱动方式并通过不同的机械机构实现抓取动作,属于高刚性的驱动,抓取力比较大,但没有柔顺性,不适合易碎易损物品的抓取[1]。新兴的软体手爪采用气动、液压、绳索等方式进行驱动,由硅橡胶、凝胶等高弹性材料制成,具有连续变形的特性,在抓取易碎易损品上具有得天独厚的优势,但普遍存在低刚度、抓取力小的问题[2]。
WU Z P等[3]提出一种关节式内骨骼气动软体手爪,采用若干刚性内骨骼单元作为驱动器内部承力结构,外层驱动部分由硅胶构成,使手爪具有一定的柔顺性,抓取力约为35N;ZHOU J S等[4]提出一种4自由度手爪,具有多种柔顺灵巧抓取模式,为限制驱动器过量变形嵌入了纤维加强筋,但降低了驱动器的输出效率; WANG L等[5]提出一种单自由度波纹管软硬混合手爪,在对物品的抓取上具有柔顺性但抓取力较小。因此,如何使手爪既具有适度柔顺性,又具有较大的抓取力是当前研究中亟待解决的一个问题。
1 新型手爪的整体结构
本文提出一种新型手爪,为满足手爪在70kPa的工作压力下抓取力≥50N,抓取范围≥150mm,并且在抓取过程中具有柔顺性的技术需求,设计出如图1所示的手爪整体结构。手爪呈对称分布,包括柔性驱动部分和手爪抓取部分。手爪抓取部分为机械结构,可通过杠杆及连杆机构对柔性驱动部分的输出力进行放大。柔性驱动部分主要由两对结构相同尺寸不同的柔性波纹管6和波纹管11构成;手爪抓取部分包括指尖部分2和指根部分3,指根和指尖部分均由6个子部分固连构成。具体工作过程为:压缩气体从三通管管接头14上端进入到指根驱动器11内部,指根驱动器外有刚性滑管12,滑管部分与指根部分3相连,当指根驱动器11伸长后,推动指根部分3绕着指根关节4转动,形成指根部分的夹取;指尖部分采用同样的滑管结构,当向指尖驱动器6通入压缩气体后,指尖驱动器会沿轴向伸长,推动指尖部分2绕指根部分3转动,实现指尖部分对物品的夹取。释放物品时,断开压缩气体输入,采用真空技术辅助整体结构复位。
2 柔性驱动气缸的研究及测试
2.1 柔性驱动气缸的结构设计
根据手爪的总体结构方案和技术需求,通过简单的受力分析可得出如表1所示的两部分柔性驱动气缸设计要求。

表1 两部分柔性驱动气缸的设计要求
图2为设计的柔性驱动气缸结构,其工作原理为:柔性波纹管4两端与左侧连接件1和右侧连接件7连接,卡箍2将柔性波纹管4固定在左、右两侧连接件上;滑管分为内、外两部分,两滑管采用间隙配合,同时波纹管的外径与内滑管5的内径相同,滑管可限制波纹管的过度膨胀变形;外滑管3和内滑管5末端设有凸台,可保证柔性波纹管的移动距离;四周均布定位螺栓8将外滑管3和内滑管5固定在两侧连接件上。通入压缩气体后,柔性波纹管4一端密封,在滑管的限制下,柔性波纹管4沿着滑管的轴向变形伸长。如果将右侧连接件固定,在压力的作用下,柔性波纹管4即可推动左侧连接件1伸长并产生输出力。
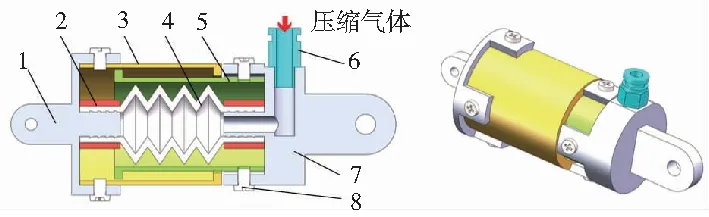
1—左侧连接件;2—卡箍;3—外滑管;4—柔性波纹管;5—内滑管;6—气动快换接头;7—右侧连接件;8—定位螺栓。图2 柔性驱动气缸结构图
2.2 柔性驱动气缸的静态性能分析
1)伸长量分析
柔性波纹管的材质为硅橡胶,硬度为shoreA10,图3所示为柔性驱动器单元的变形示意图。
基于Yeoh模型以及材料的应变势能函数可得:
(1)
式中:W为应变函数;I1为变形张量的主不变量;λi为轴向、周向和径向伸长比;L0为单个气腔初始长度;R0为气腔外壁初始半径;r0为气腔内壁初始半径。滑管假设为刚体,则驱动器外壁半径在整个过程中有R=R0。根据橡胶材料的不可压缩性可将变形过程中单元气腔的半径r和柔性驱动器伸长量L关系表示为
(2)

图3 柔性驱动器单元变形示意图
柔性驱动器产生轴向位移过程视为准静态过程,根据虚功原理,静态平衡系统的所有外力经过虚位移所做过的虚功之和为0。对于驱动器即气压做功应与增加的应变能相平衡,对应的表达式如下:
(3)
式中:Va为气腔体积;Vb为硅橡胶体积。
(4)
假设单元气腔硅胶的截面积在变化过程中保持不变,则可以得到下式:
(5)
令:
(6)
η1、η2、η3分别为轴向、周向和径向应变算子,联立式(1)-式(6)可建立波纹管腔室气压pi与软体伸长量L的关系:
[C10+2C20(I1-3)+3C30(I1-3)2]
(7)
其中:
(8)
式(7)中:N为波数;C10、C20、C30为Yeoh模型材料常数,可通过试验测得。由式(8)可以看出波纹管初始参数值确定后,Q和K即为常数。当波纹管的伸长量L为已知量时即可求出所需的气压值pi。
2)输出力分析
如图4所示,当压缩气体通入柔性气缸后,压缩气体作用在柔性波纹管内部使波纹管伸长变形,此过程中波纹管产生的轴向阻力为Fs,当柔性波纹管膨胀至整个滑管内部后,压缩气体产生的推力为Fp,两滑管之间的摩擦力为Ff。


图4 柔性驱动气缸的输出力分析图
整个过程中柔性驱动气缸产生的输出力F可表示为
(9)
其中f(L)为柔性驱动器伸长量与压力的函数,具体参见式(7)。由于滑管间采用间隙配合,并且滑管材料带有一定的自润滑性能,因此可以不考虑滑管之间的摩擦力Ff影响。当柔性驱动气缸达到设定伸长量后,其输出力与柔性气缸的有效面积有关,则可将式(9)写为
(10)
由式(10)可以看出,当输入柔性驱动气缸输入气压p小于设定位移所需的气压值pi时,柔性气缸的输出力为0;而当输入气压p大于所需气压值pi时,柔性驱动气缸的输出力F即为气缸理论输出力与伸长时所需力的差值。
2.3 柔性驱动气缸的输出力测试
图5为柔性驱动气缸输出力测试原理图,对指根和指尖部分柔性驱动气缸不同伸长量下的输出力进行测试,测试的供气压力范围为0~70kPa,每隔5kPa记录一组数据。
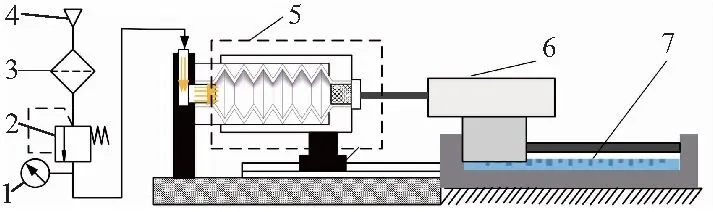
1—数显压力表;2—减压阀;3—过滤器;4—气源;5—待测柔性驱动气缸;6—测力计;7—光栅尺。图5 柔性驱动气缸输出力测试原理图
图6给出了指根和指尖部分柔性驱动气缸在不同输入气压不同伸长量下的输出力图。从图中可以看出,指根和指尖部分柔性驱动气缸的输出力与压力呈线性关系,在70kPa的工作压力下,指根和指尖部分柔性驱动气缸的最大输出力分别为50N和22N,均满足设计要求。

图6 指根和指尖部分柔性驱动气缸输出力曲线图
3 手爪的抓取力与实物抓取测试
抓取力是手爪非常重要的性能参数,大的抓取力与抓取柔顺性是柔性气缸驱动手爪的最大特点。本节针对手爪的抓取能力与实物抓取进行试验研究。
3.1 手爪的最大抓取能力测试
最大抓取能力是指在不同压力下手爪所能抓取的最大质量。将手爪样机固定后测量得手爪的抓取范围为0~160mm,搭建如图7所示的手爪抓取能力测试系统。
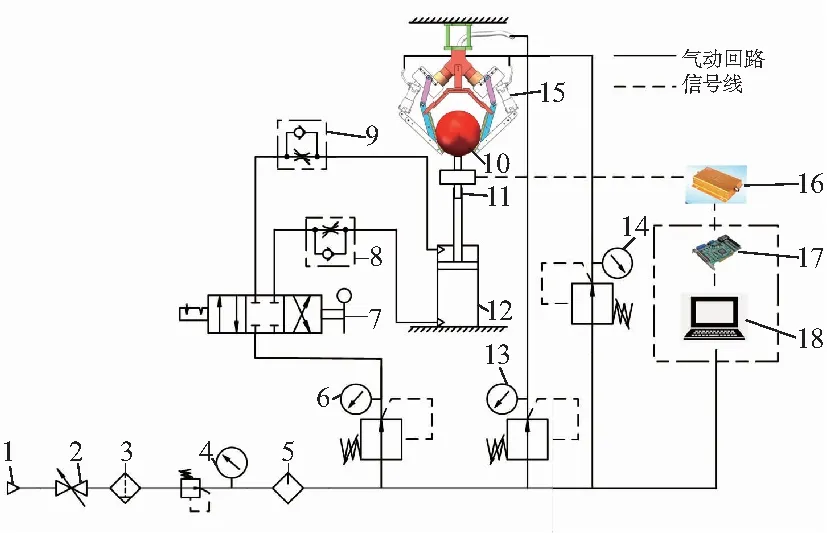
1—气源;2—开关阀;3—分离器;4、6、13、14—减压阀;5—干燥器;7—手动换向阀;8、9—单向节流阀;10—球形壳体;11—拉压力传感器;12—气缸;15—手爪样机;16—变送器;17—采集卡;18—计算机。图7 手爪抓取能力测试系统
根据手爪的抓取范围选择直径120mm的球形壳体作为基准被抓物,当壳体质心恰好与指根关节平齐时,开始测试。具体测试过程为:将球形壳体10与拉压力传感器11相连并安装在气缸12上,调节减压阀13和14使手爪样机15对球形壳体10形成抓取,气缸12对球形壳体10施加向下的拉力,直至球形壳体10挣脱手爪样机15的抓取。记录不同压力下球形壳体脱离抓取时拉压力传感器所产生的最大电压值,变换后可得图8所示手爪的抓取能力曲线图。
从图8可以看出手爪在工作压力为70kPa时的最大抓取力为12.2kg,即122N。手爪的抓取能力与供气压力近似呈线性关系,对曲线作线性拟合,可以得到手爪的抓取能力GLc(单位:kg)与输入气压pin(单位:kPa)的函数关系式为
GLc=0.191 29pin-1.036 28
(11)

图8 柔性气缸驱动手爪的抓取能力曲线图
3.2 手爪的实物抓取试验
对手爪的实物抓取能力进行试验,根据手爪的抓取范围,选取生活中常见的不同形状的物品以及易碎易损品为抓取对象,实际抓取效果如图9所示。

(a)棒球;(b)灯泡;(c)柚子;(d)洗手液;(e)茶叶罐;(f)水杯;(g)4L矿泉水;(h)光碟;(i)礼物盒;(j)遥控器;(k)西红柿;(l)方便面饼;(m)苹果;(n)玻璃盆栽。图9 手爪实物抓取试验结果
试验结果表明,柔性气缸驱动手爪抓取动作柔顺安全,对易碎易损品和不同形状的物品具有较好的抓取效果。
4 结语
本文提出了一种新型柔性气缸驱动手爪,重点介绍了手爪和柔性驱动气缸的结构设计,同时针对柔性驱动气缸的特点进行静态理论分析与输出力测试,对手爪的抓取能力和实物抓取进行测试。试验结果表明:在70kPa的工作压力下,指根和指尖部分柔性驱动气缸的最大输出力为50N和22N;手爪的最大抓取力为122N,可以抓取质量为12.2kg的物品,比一般柔性手爪的35N抓取力提高了约2.4倍,并且对易碎易损品和不同形状的物品可进行柔顺安全抓取。
