虚拟同步风电场协同光伏电站附加阻尼控制方法
2022-04-19盛师贤周鑫王德林廖佳思李婧祺康积涛
盛师贤,周鑫,王德林,廖佳思,李婧祺,康积涛
(1. 西南交通大学 电气工程学院, 四川 成都 611756;2. 云南电网有限责任公司电力科学研究院, 云南 昆明 650217)
0 引言
电力系统低频振荡是指并列运行的同步发电机组因阻尼转矩不足[1],在小干扰作用下发电机转子间发生相对摇摆,造成线路功率和母线电压产生0.1~2.5Hz的持续振荡,其主要发生在长距离、重负荷的输电线路上[2]。大型风电场和光伏电站主要分布在远离负荷中心的偏远地区,风光大规模并网会使得低频振荡问题更加突出。传统同步机组除考虑电力系统稳定器(power system stabilizer,PSS)的指令外,还要考虑其他控制目标,导致PSS不能单独发挥作用。新能源机组的控制目标较少,控制方式灵活,在新能源渗透率高的地区很适合通过改变控制策略增加其抑制低频振荡的能力[3-4]。
在低频振荡模态检测与新能源机组参与抑制低频振荡方面,国内外学者已有大量研究。现行的电力系统低频振荡检测方法有特征值分析法、时域仿真法和信号分析法等[5]。特征值分析法是经典的低频振荡分析方法,但存在对模型参数的精确度要求较高等缺点[6]。Prony分析是目前发展最成熟的低频振荡在线分析理论。文献[7]基于变桨距控制设计了风电机组的附加阻尼控制策略,以系统频率偏差为输入,通过调节桨距角大小改变风机的输出功率。但桨距角控制系统为机械系统,调节速度很难适应电磁功率振荡变化,抑制低频振荡的效果不好。文献[8]基于Prony法设计了附加阻尼控制器各个环节,以双馈风机(doubly fed induction generator, DFIG)的转差率作为控制器的输入,通过调节励磁控制双馈风机输出有功功率对系统阻尼进行补偿。但因为以本地信号作为输入,忽略了抑制区域间功率振荡。文献[9]以大型光伏电站为研究对象,设计了振荡频率自适应的附加阻尼装置,以光伏并网点处传输线上有功功率微分信号为输入,实现了光伏电站在振荡抑制模式和最大功率追踪(maximum power point tracking,MPPT)模式之间的平滑切换。该控制策略在需要光伏电站多发有功的半个周期不参与抑制低频振荡,保证了光伏电站在抑制低频振荡的同时尽量多发有功功率,有较高的工程实用价值。文献[10]针对采用虚拟同步机(virtual synchronous generator,VSG)控制的光伏储能系统,在VSG控制的光储系统上设计附加阻尼控制器,以同步机转子转速差为输入,实现抑制功率振荡的目的。但在实际应用时,同步机转子转速很难测量,该控制方法难以投入实用。
上述文献均在新能源机组上设计了附加阻尼控制器,但没有充分利用风机的惯性和阻尼,也没有考虑在同时包含风电场和光伏电站的区域,如何利用光伏电站输出阻尼功率弥补双馈风机运行在转速恒定区时因变桨距控制响应速度慢导致附加阻尼控制能力不足的缺点。
本文针对含风电场和光伏电站的系统,提出一种虚拟同步风电场协同光伏电站的附加阻尼控制方法来抑制系统的低频振荡。首先对双馈风机采用VSG控制和减载控制,充分利用风机的惯性和阻尼。然后以风机并网点处有功功率变化量为输入,在DFIG和光伏电站上设计附加阻尼控制器。当风机运行在转速恒定区时,仅光伏电站参与附加阻尼控制。最后以含风电场和光伏电站的系统为研究对象,验证所提协同控制方法的有效性。
1 双馈风机和光伏电站数学模型
1.1 双馈风机减载控制

1.2 双馈风机VSG控制
双馈风机VSG有功环的控制框图如图1所示。由式(5)和图1可知,虚拟同步风电场的有功环以双馈风机减载控制后得到减载功率为输入,其输出决定VSG内电势的频率和相角[15-16]。
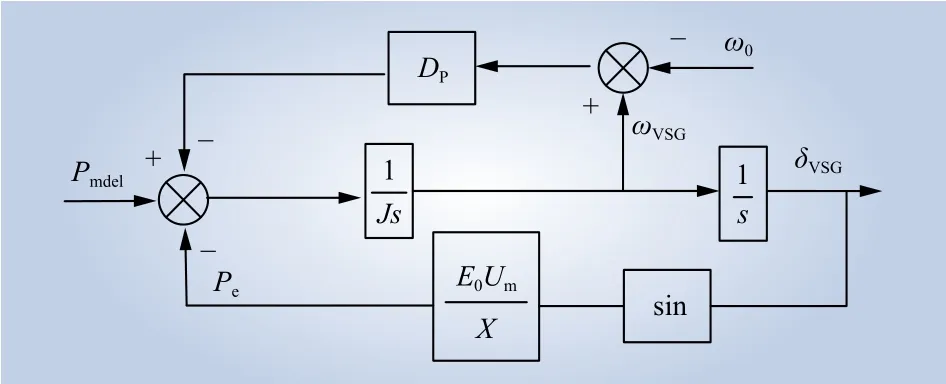
图1 VSG有功环控制原理Fig. 1 Control principle of VSG active power loop
双馈风机的虚拟同步控制中的无功控制模仿同步发电机的励磁调节器[17],其输出决定VSG内电势的幅值。VSG的无功控制原理如图2所示。引入并网点电压有效值Um实现输出端电压的闭环控制。虚拟励磁调节器输出的电压参考值Uref与Um做差后,经过PI环节得到双馈风机输出虚拟励磁电动势的幅值E0。
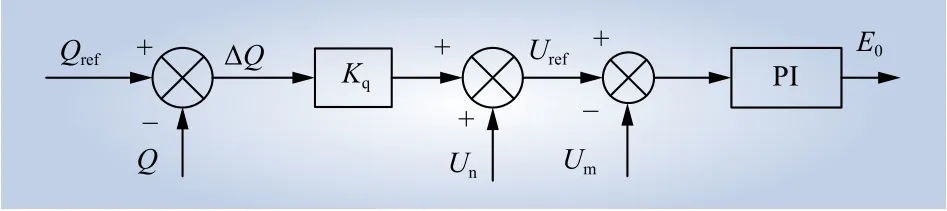
图2 VSG无功控制原理Fig. 2 VSG reactive power control principle
根据上述减载控制和VSG控制原理,将双馈风机双闭环控制的电流内环控制替换为VSG控制,可得到基于功率备用的双馈风机VSG控制框图如图3所示。根据图1~3可知,双馈风机减载控制后其输出作为VSG有功控制的参考功率,经有功控制环后得到虚拟励磁电动势的功角。有功控制环和无功控制的输出共同作为PWM逆变的调制波作用在转子侧变流器上。
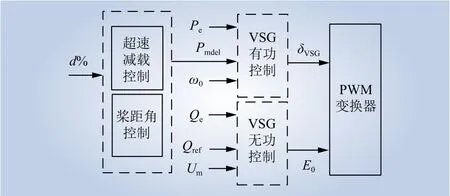
图3 基于功率备用的双馈风机VSG控制Fig. 3 VSG control of DFIG based on power reserve
1.3 光伏电站模型
光伏发电系统一般包括光伏阵列、直流电容和逆变器。光伏阵列将光能转换为电能,逆变器将光伏阵列输出的直流电逆变为三相交流电。光伏并网逆变器通常采用电压电流双环解耦控制策略[18]。电压外环保持直流侧电压稳定,电流内环跟踪电网电压[19-20],逆变器的数学控制方程为
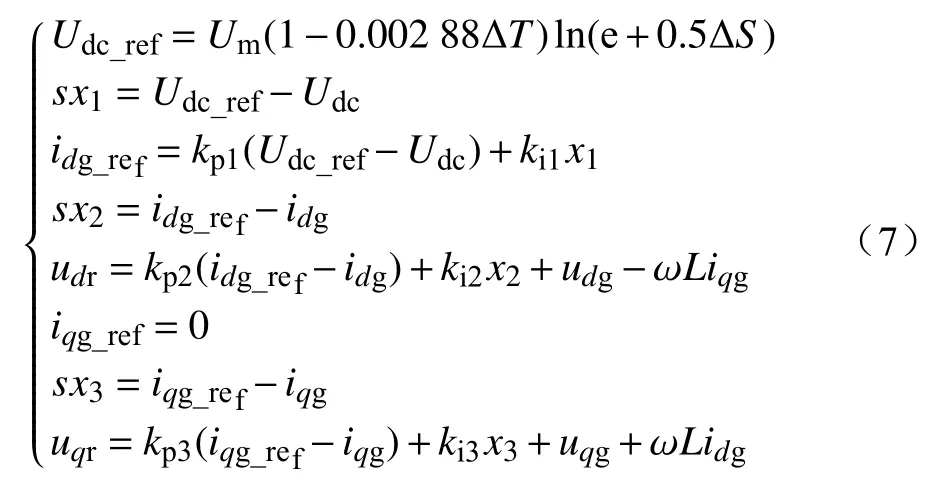
式中:x1、x2和x3为中间变量;ΔT、ΔS分别为温度和光照强度变化量;kp1、ki1为电压外环的控制参数;kp2、ki2和kp3、ki3分别为电流内环d轴和q轴的控制参数;idg、iqg分别为逆变器输出电流的d轴和q轴分量;idg_ref、iqg_ref为逆变器输出电流的d轴和q轴分量的参考值;udg、uqg分别为光伏电站并网点电压ug的dq轴分量;Udc、Udc_ref分别为直流电容电压及其参考值;Um、Ipv为光伏阵列输出电压和电流;ω为逆变器同步角速度;L为逆变器等效电感;udr、uqr分别为逆变器输出电压的d轴和q轴分量。
光伏并网逆变器的控制策略如图4所示。
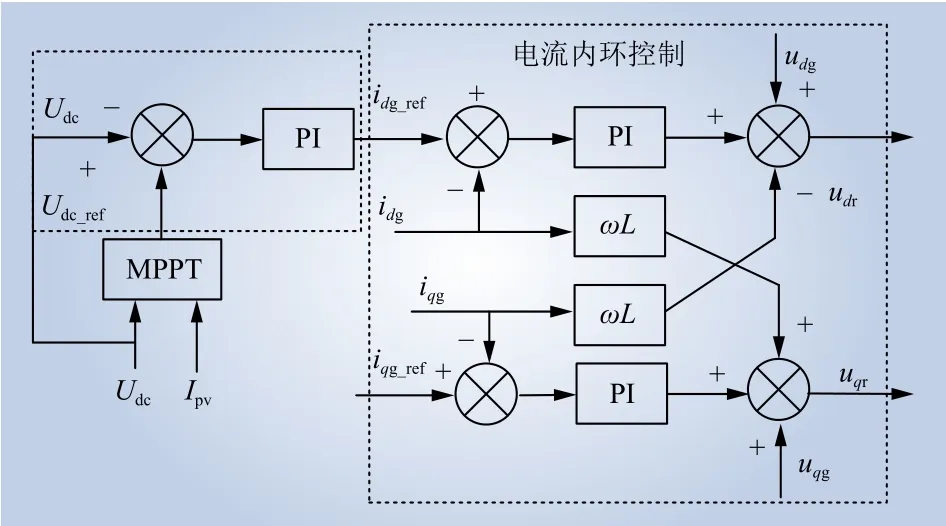
图4 光伏逆变器解耦控制Fig. 4 Decoupling control of PV inverters
由式(7)和图4可知,可以通过改变中间变量x1控制逆变器输出电流d轴分量idg_ref,进而达到控制光伏电站输出有功功率的目的。
2 风电场协同光伏电站附加阻尼控制
新能源机组通过电力电子变换器并网,电力电子装置在隔离系统对新能源机组影响的同时也制约了其抑制低频振荡的能力。VSG控制能充分利用DFIG的惯性和阻尼,增加其对系统阻尼的贡献。同时应该调整新能源机组的控制结构,进一步提高其抑制低频振荡的能力。
2.1 阻尼特性理论分析
本节结合图5所示含风电场等效电路图推导风电场的虚拟同步控制和附加阻尼控制增加系统阻尼的原理。图5中:G2为无穷大电网;U为电压幅值;母线B2为全系统的参考节点,相角设为0°;E′G为同步发电机G1内电势;δ为G1功角;Um∠θ为双馈风机G3并网点母线电压;P、Q分别为G3输出的有功功率和无功功率;I1、I3分别为G1和G3流向G2的电流,两者之和为I2。X1为同步机并网点母线B1与风机并网点B3之间的电抗;X2为B3和B2之间的电抗,忽略线路的电阻。

图5 含风电场的等值电路Fig. 5 Equivalent circuit with wind farm

2.2 附加阻尼控制策略
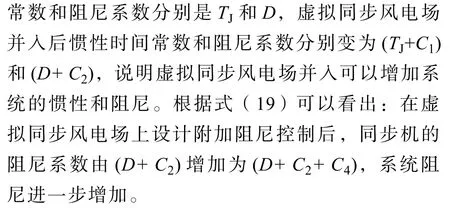
基于VSG的双馈风机的附加阻尼控制方法如图6所示。附加阻尼控制器一般由比例环节、滤波环节、移相和限幅环节4部分构成[21]。通过向附加阻尼控制器输入和同步发电机转速信号强相关的量,使新能源机组输出的功率满足正阻尼条件[22],抑制系统的低频振荡。因为虚拟同步机的有功控制和无功控制近似解耦[23],本文仅在其有功控制环上设计附加阻尼控制器。
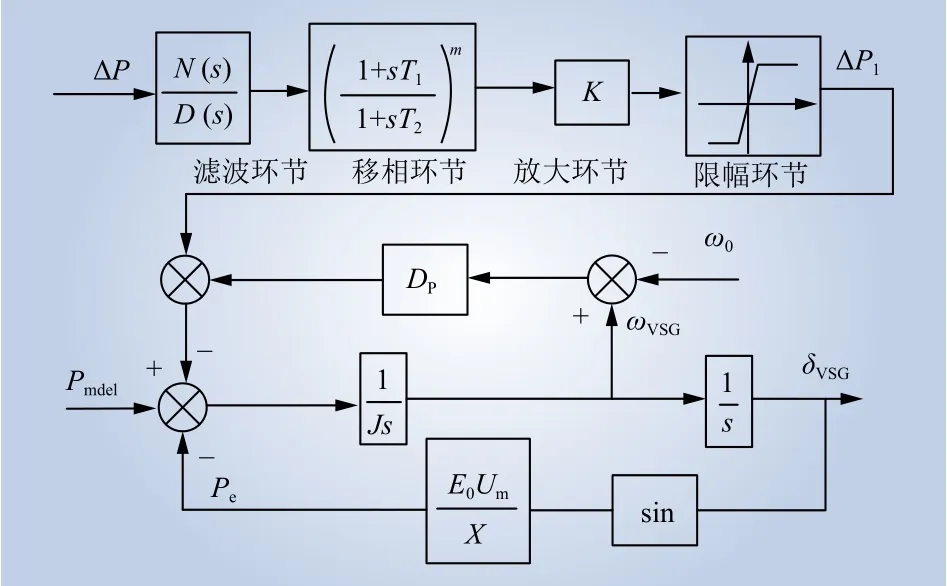
图6 虚拟同步风电场附加阻尼控制方法Fig. 6 Additional damping control method for virtual synchronous wind farm
滤波环节的作用是滤除输入信号中高次谐波分量和直流分量,避免高次谐波和稳态改变量引起控制器动作。可选用较为简单的二阶带通滤波器,N(s)和D(s)分别为该环节的分子和分母传递函数,中心频率可以根据转子运动方程计算。
移相环节补偿广域信号传输和滤波环节带来的延时。为了简化分析,忽略广域信号带来的延时。
比例环节用于调节控制器输出参考功率的大小,本文所研究的控制方法处于可行性分析阶段,可以使用粒子群算法对该参数进行优化,以获取最优阻尼比[24]。但因为优化算法耗时较长,在该控制达到在线应用阶段时,可以改用相位补偿法等方法确定控制器增益,解决耗时较长的问题。
限幅环节用于限制控制器输出参考功率的幅值。该环节的上限设定为新能源机组的最大输出功率,当振荡发生后备用功率全部投入使用。
同理,光伏电站附加阻尼控制方法如图7所示。
图7 光伏电站附加阻尼控制方法Fig. 7 Additional damping control method for PV power stations
由图6~7可知,附加阻尼控制器采集DFIG并网处有功功率变化量为输入,经过滤波、移相、比例和限幅环节使新能源机组额外输出满足正阻尼条件的功率。假设光伏电站工作的温度和光照强度都不变,仅考虑风速变化导致双馈风机运行在不同区域。虚拟同步风电场协同光伏电站附加阻尼控制策略如图8所示。
设风机在MPPT区域运行时对应的切入风速V切入和额定VN分别为6 m/s 和12 m/s,减载系数d%设为20%。当双馈风机运行在MPPT区域时,虚拟同步风电场和光伏电站都参与附加阻尼控制。当双馈风机运行在转速恒定区时,考虑到风机变桨距控制响应速度慢、抑制振荡效果不理想的特点,使DFIG不再参与附加阻尼控制,而是控制光伏电站输出额外的附加功率来弥补DFIG的不足。在整个控制策略中,光伏电站都未减载控制,光伏电站在振荡的正半周期内通过少输出功率参与附加阻尼控制。
3 算例分析
根据某电厂向电网主网输送电能时的数据,建立图9所示的系统等效图。图中:G1是容量为50MW的同步机;G2是无穷大电网。DFIG是容量为9 MW(6×1.5MW)的等值双馈风电机组;PV是容量为6 MW的等值大型光伏电站。发电机的基准电压为13.8 kV,基准功率为电厂容量,输电线路基准电压为230 kV。设t= 10s时在并入无穷大电网处发生波动,以母线B1处有功功率变化量为附加阻尼控制器的输入。
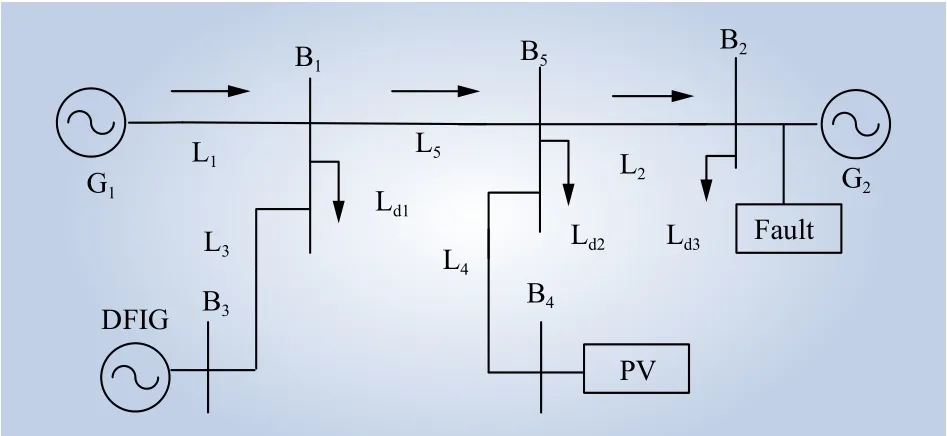
图9 等效仿真系统Fig. 9 Equivalent simulation system
3.1 3种场景下有功功率变化
为了验证上述虚拟同步控制和附加阻尼控制策略的有效性,分别研究3种场景下故障消除后母线B1处测得的有功功率变化。场景1中无光伏电站接入,场景1和场景2 采用图10所示自然风。

图10 自然风速曲线Fig. 10 Natural wind simulation curve
(1)场景1。
为研究DFIG虚拟同步控制对系统阻尼的影响,设立如表1所示的3种运行工况。
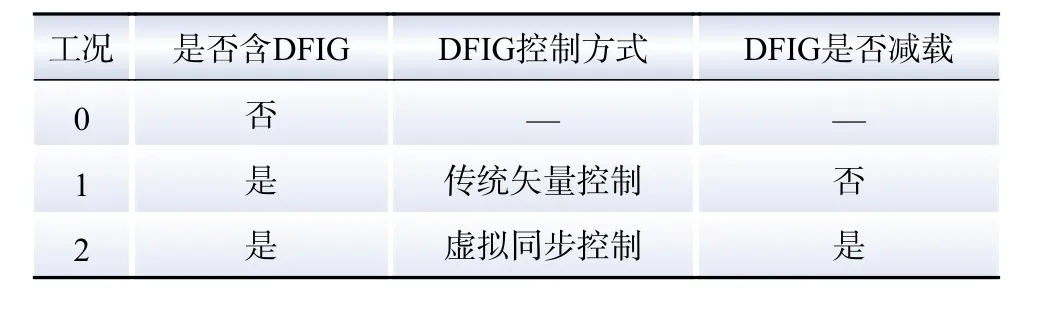
表1 场景1运行工况Table 1 Operating conditions of scenario one
上述3种运行工况下母线B1上的有功功率变化如图11所示。3种工况下母线B1上的有功功率稳态值不同是因为工况0中无DFIG并网,工况1中DFIG未减载控制,工况2中DFIG是基于功率备用的VSG控制方式。虽然在不同的工况下双馈风机输出的有功功率不同,但是系统中同步发电机、光伏电站和无穷大电网输出的有功功率也不同,系统总体有功变化很小。不同工况下系统中总负荷未发生变化,系统中总体有功输出变化也很小,在抑制低频振荡的同时,不会对整个系统的负荷平衡产生影响。由图11可知,工况0和工况2中母线B1处测得的有功功率在故障发生约4个周期后停止振荡,说明VSG控制的DFIG在抑制低频振荡方面已经基本接近传统同步机。工况1中功率振荡约10个周期后才逐渐平息,振荡周期是工况2的2.5倍,风电场的传统控制方法大大削减系统的阻尼。
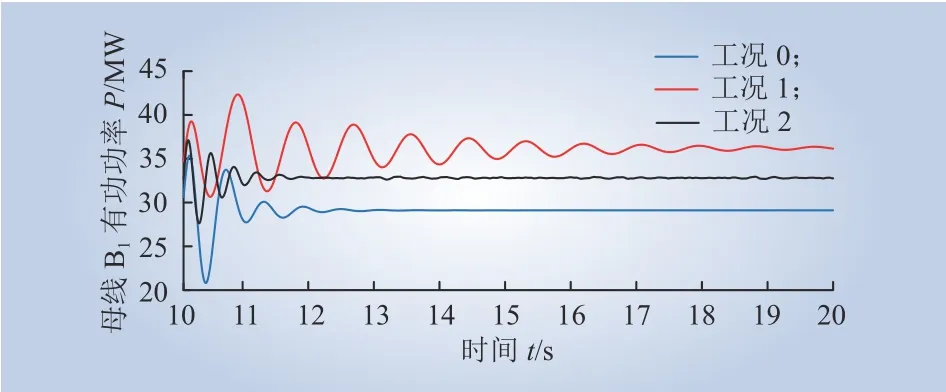
图11 场景1母线B1上有功功率变化Fig. 11 Active power change of bus B1in scenario 1
(2)场景2。
含虚拟同步风电场和光伏电站的系统中,无附加阻尼控制时母线B1上有功功率变化如图12所示。
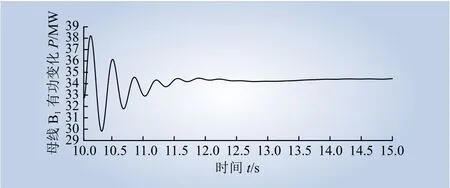
图12 母线B1有功功率变化Fig. 12 Active power change of bus B1
为研究在MPPT区域虚拟同步风电场协同光伏电站附加阻尼控制效果,场景2中设置如表2所示的2种运行工况。
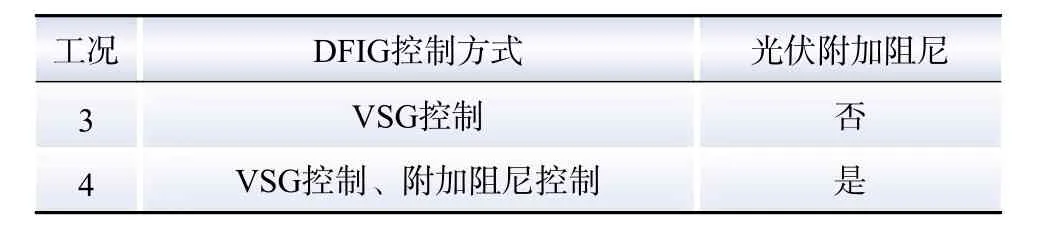
表2 场景2运行工况Table 2 Operating conditions of scenario 2
使用粒子群算法对工况4下控制器增益进行优化。设定初始粒子群规模为30,最大迭代次数为50次。优化后得DFIG控制器增益K与PV控制器增益Kpv如表3所示。

表3 控制器参数优化结果Table 3 Controller parameter optimization results
表3中阻尼比计算时首先将振荡功率分离为单一频率的自振信号,再按照式(20)计算。

式中:N为参与计算的波峰和波谷个数;A1、A′1分别为参与计算的首波波峰和波谷值;AN、A′N分别为参与计算的尾波波峰和波谷值。
工况3和工况4母线B1上有功功率变化如图13所示。为了更好地抑制低频振荡,振荡发生时,工况4中DFIG释放备用功率,向电网输出额外的附加功率。为防止振荡继续发生,在振荡消失后的一段时间内,工况4中DFIG持续向电网注入备用功率,导致2种工况下母线B1上的有功功率稳态值不同。根据图13可知,附加阻尼控制前后振荡频率由2.9 Hz变为1.7 Hz,振荡频率降低。振荡周期由振荡发生后的5个周期降低为2个周期,振荡明显减弱。说明在MPPT区域该控制策略能有效增加系统的阻尼,抑制低频振荡。
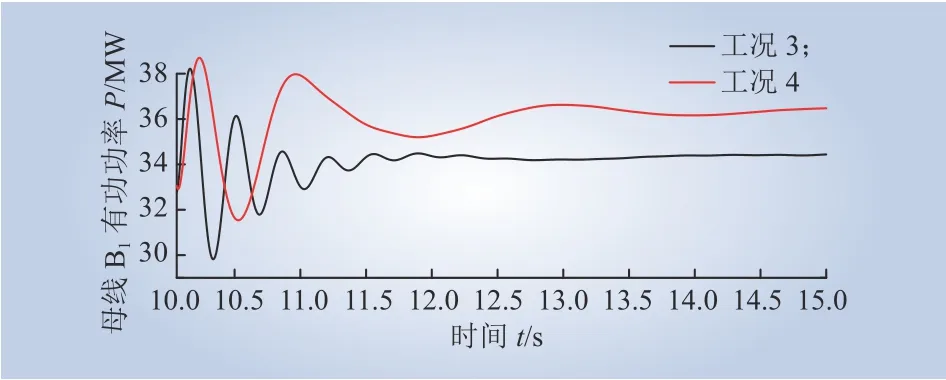
图13 场景2母线B1上有功功率变化Fig. 13 Active power change of bus B1in scenario 2
(3)场景3。
为研究在转速恒定区虚拟同步风电场协同光伏电站附加阻尼控制效果,场景3中设置如表4所示的2种运行工况。

表4 场景3运行工况Table 4 Operating conditions of scenario 3
工况5和工况6附加阻尼控制前后母线B1上有功功率变化如图14所示。根据图14可知,附加阻尼控制前后功率振荡频率由2.9Hz降低为1.3Hz,振荡周期数也明显降低。因光伏电站的容量在系统中占比较小,且仅在半个周期内参与附加阻尼控制,所以工况6中抑制低频振荡的效果不如工况4,但明显好于无附加阻尼时的情况。
图14 场景3母线B1上有功功率变化Fig. 14 Active power change of bus B1in scenario 3
3.2 Prony结果分析对比
Prony分析是低频振荡分析法中一种常用的模态辨识方法,基本思想是用一系列的指数函数的线性组合来拟合等间距采样的数据,估算出给定信号的幅值、频率、衰减因子等信息。对于给定的函数f(x),Prony分析拟合的离散信号为
式中:Ai、θi、αi和fi分别为拟合信号的幅值、相位、衰减因子和频率;Δt为采样间隔;p为模型阶数。按照平方误差和最小的原则[25]求出式(21)中的参数Ai、θi、αi和fi,即
根据上一节的分析,取工况1、4、5和6中的曲线作图,得到不同工况下母线B1上有功功率变化结果对比如图15所示。利用Prony分析,以上4种运行工况时系统主导模态信息如表5所示。
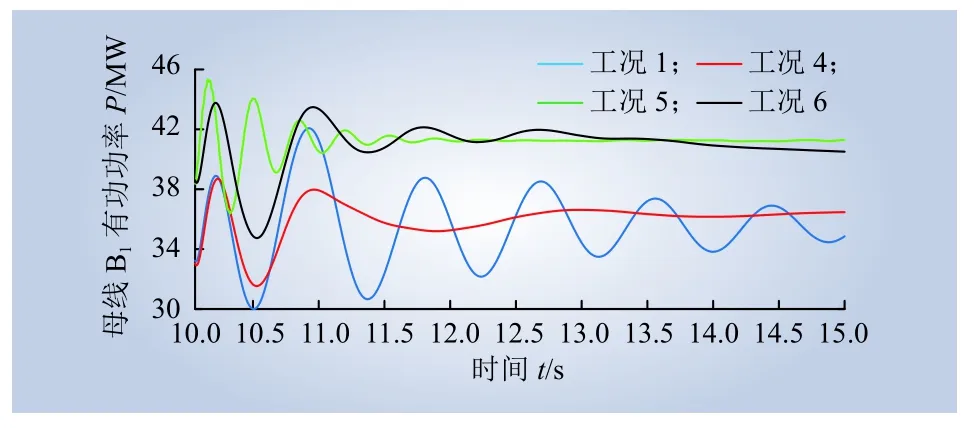
图15 不同工况下母线B1上有功功率变化Fig. 15 Comparison of active power changes on bus B1under different operating conditions

表5 主导模态信息Table 5 Dominant mode information
由图15和表5可知,当风电场和光伏电站都参与附加阻尼控制时,系统的振荡频率衰减最快,对系统主导模态阻尼比的提升效果最明显。基于传统控制的无附加阻尼控制的DFIG接入时,母线B1上功率振荡时间最长,系统的阻尼比最小。这说明当系统中接入新能源机组容量较大,且新能源机组采用传统控制方法时会严重削弱系统的阻尼。DFIG退出附加阻尼控制后,光伏电站附加阻尼控制使系统的阻尼比提高了8.6%,对系统阻尼也有较大的贡献。这些都与上述分析结果相符,说明了本文协同控制的正确性和可行性。
4 结论
本文通过在风电场和光伏电站上设计附加阻尼控制器,使其向电网输送与低频振荡量有关的动态功率,研究其抑制电网低频振荡的能力。通过理论和仿真分析,得到以下结论。
(1)通过理论分析和仿真验证可证明采用VSG控制的DFIG并网后能增加系统的阻尼。系统振荡的时间明显小于传统矢量控制,在抑制低频振荡方面的能力接近同步机。
(2)当风速在切入风速和额定风速之间时,风机和光伏电站附加阻尼控制可以显著缩短振荡周期数,系统主导模态的阻尼比也在各种工况中最大。
(3)当DFIG运行在转速恒定区时,考虑到风机变桨距控制响应速度慢、抑制振荡效果不理想的缺点,DFIG不再参与附加阻尼控制。控制光伏电站输出额外的附加功率来弥补DFIG的缺点,可以取得较好的抑制低频振荡的效果。