速度差影响下混合驾驶交通流动态特性分析
2022-04-18邸允冉郑小燕张卫华
丁 恒 潘 昊 邸允冉 郑小燕 张卫华
(合肥工业大学汽车与交通工程学院,合肥 230009)
伴随着交通拥堵、交通安全等问题日益严重,自动驾驶车辆(AV)作为一种可提升交通效率并改善道路安全性的产品,越来越受到关注[1].但AV的全面普及不可能一蹴而就,在未来很长的一段时间内,AV和人工驾驶车辆(HV)混合的交通流环境将一直存在[2].
近些年,很多学者针对AV与HV混合的交通流环境进行了研究,包括通行能力[3-4]、基本图特性[5-6]与交通流稳定性[7]等.在通行能力研究方面,Chen等[3]提出了一种适用于混合流路段的通行能力计算公式;而在交叉口场景中,Sun等[4]提出的MCross方案相比于常规信号控制可以使通行能力增加接近1倍.在混合流基本图的研究方面,Yao等[5]分别对HV和AV跟驰行为进行建模,推导了不同AV渗透率下混合交通流的基本图模型;Zhou等[6]则进一步研究了AV渗透率和车队强度对基本图的影响.在稳定性研究方面,Talebpour等[7]通过所提出的框架证明了AV可以抑制交通波的形成与传播,提高交通流稳定性.
混合交通流的车速差异作为影响交通流特性的一大因素,也有很多学者对其进行了研究.在微观建模层面,Helbing等[8]采用元胞自动机(CA)模型探究了混合交通流的一致性在不同密度条件下移动特征;邝华等[9]、郑容森等[10]建立了存在速度差的混合流单车道与双车道CA模型,并研究了交通流特性.另外一些学者则从宏观建模角度进行研究,如Chanut等[11]在考虑2种车型存在自由流速度差异的前提下,提出了一阶宏观交通流模型.
以上研究揭示了一些速度差影响下的传统混合交通流特性,并不适用于分析存在AV的混合环境.目前,国内外针对AV与HV存在速度差的研究[12]尚未从整体交通流角度将速度差与渗透率联合考虑.此外,针对混合交通流特性的分析还不够全面.
因此,本文将速度差与渗透率2个变量综合考虑,在不同交通密度条件下,得到混合有AV的交通流基本图,并从多角度对交通流动态特性进行了较为全面的研究.本文对2个变量各自影响的范围和程度以及它们之间的联系进行了分析,为不同渗透率下AV的速度决策和规划提供理论基础.
1 微观交通流模型
微观交通流模型主要包括跟驰模型和换道模型,能够反映车辆在跟车和换道时的微观动力学特征.
1.1 HV跟驰模型
智能驾驶员模型(IDM)是由Treiber等[13]提出的一种基于驾驶员期望的跟驰模型,其被广泛应用于HV的跟驰行为研究与仿真.IDM模型公式如下:
(1)

1.2 AV跟驰模型
本文采用美国加州大学伯克利分校PATH实验室提出并验证的协同自适应巡航控制(CACC)模型[14]作为AV的跟驰模型.该模型公式如下:
(2)
式中,en为车辆n实际车头间距与期望车头间距的误差;tc为期望车头时距参数;vn,prev为车辆n在前一时刻的速度;kp为车头间距误差控制系数;kd为车头间距误差微分项控制系数.
1.3 换道模型
Kesting等[15]提出的通用MOBIL换道模型被广泛应用于包括AV环境[16]的道路交通流微观建模研究.本文中HV与AV遵守同样的换道准则,故选取MOBIL模型同时作为两者的换道模型:
(3)
R>Δath
(4)
(5)

由式(3)、(4)可知,当车辆n满足换道所产生的整体效益大于换道触发阈值,且换道后自身与后车加速度都满足安全限制条件式(5),车辆n才进行换道操作.
2 基本图分析
本文通过数值实验分析AV与HV之间速度差影响下基本图特征和混合驾驶交通流动态特性.实验场景如图1所示,设置周期性边界的单向两车道快速道路,长度1 000 m.车辆初始位置随机分布,AV数量由总车辆数与渗透率P的乘积得到.结合文献[15-18]与本文实验场景,模型参数取值如下:IDM中amax=1 m/s2,v0=22.22 m/s,s0=2 m,t0=1.5 s,b=2 m/s2,l=5 m;CACC模型中tc=0.6 s,kp=0.45,kd=0.25;MOBIL换道模型中p=0.5,Δath=1,bsafe=4 m/s2.
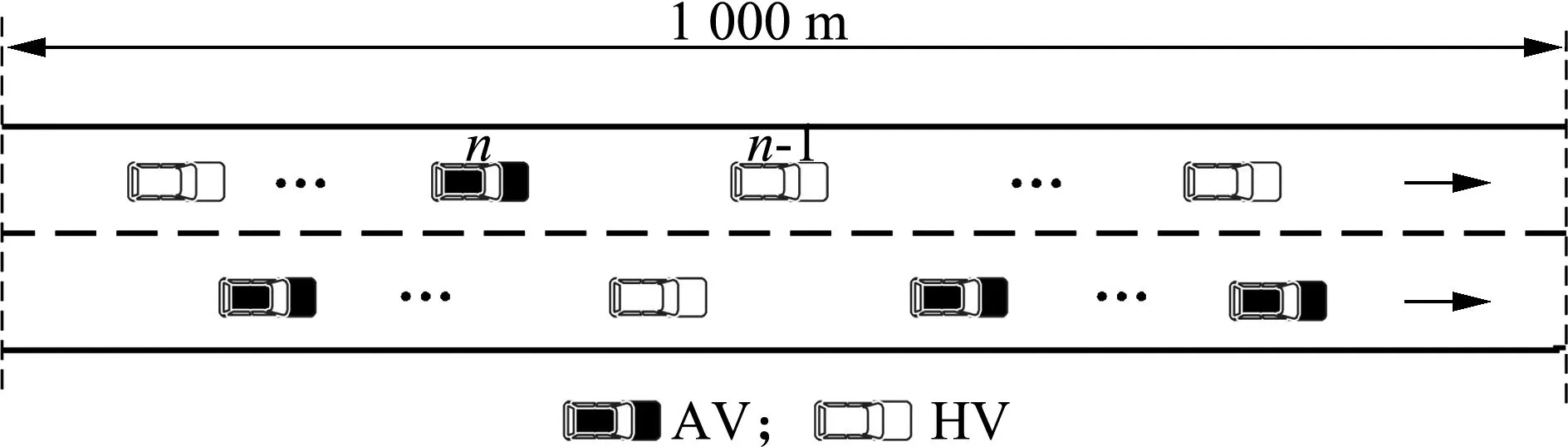
图1 数值实验场景
与已有研究[8-12]类似,本研究中的速度差是指车辆自由速度的差异,HV和AV的速度差在数值实验中由不同的自由速度体现.HV自由速度为80 km/h,AV自由速度不低于HV并处于一个合理的区间内,设置不同车辆密度及AV渗透率的组合进行数值实验.实验中,车辆数以5辆为间隔,由10辆增加到200辆;渗透率以0.1为间隔,由0增加到1;AV自由速度以1 km/h为间隔,由80 km/h增加到100 km/h.每次实验时长为2 000 s,待运行达到稳态后收集分析所需的位移、速度、加速度等数据,收集时段为1 500~1 800 s, 步长Δt=0.1 s.考虑到实验中2种车型空间位置的随机分布,各场景下均独立进行3次实验并取均值,作为该场景下的实验结果.
图2(a)和(b)分别展示了无速度差时不同AV渗透率下流量-密度关系和速度-密度关系;图2(c)和(d)则分别展示了AV和HV存在20 km/h速度差时不同AV渗透率下流量-密度关系和速度-密度关系.
由图2(a)、(b)可得,在不同AV渗透率下,道路通行能力和交通流临界密度存在差异.AV渗透率的提高可以增加道路通行能力,使临界密度增大.对比图2(a)、(b)、(c)、(d)发现,提高AV自由车速会使临界点及其左侧的基本图发生变化.AV自由车速的提高会使自由流及临界流的交通流平均速度增大,道路通行能力也随之增加,但增加幅度远小于渗透率所导致的变化.在高密度区,交通流平均速度低,AV与HV的速度差无法体现,故在分析速度差影响下混合驾驶交通流动态特性时,只探究各指标在低密度与中密度条件下的规律.
(a)无速度差时流量-密度关系
3 交通流动态特性分析
选取通行效率、交通安全、燃油消耗、舒适度作为AV与HV速度差影响下混合驾驶交通流动态特性分析指标.低密度条件选取20辆/km,中密度条件选取60 辆/km进行数值分析.
3.1 通行效率分析
Brilon[19]提出了一个借鉴物理学中功和功率概念的交通效率评估指标,其表达形式为
(6)

低密度条件下通行效率热力图见图3(a).在所有速度差下,通行效率与AV渗透率都成正比,渗透率越高,通行效率越大.此外,渗透率处于10%~50%区间时,速度差对通行效率影响较小;渗透率处于50%~80%区间时,随着速度差的增大,通行效率提升幅度变大;渗透率处于80%~90%区间时,速度差的增大使通行效率显著提升,在渗透率分别为80%和90%时,速度差20 km/h相较于无速度差场景,通行效率提升了32%和48%.
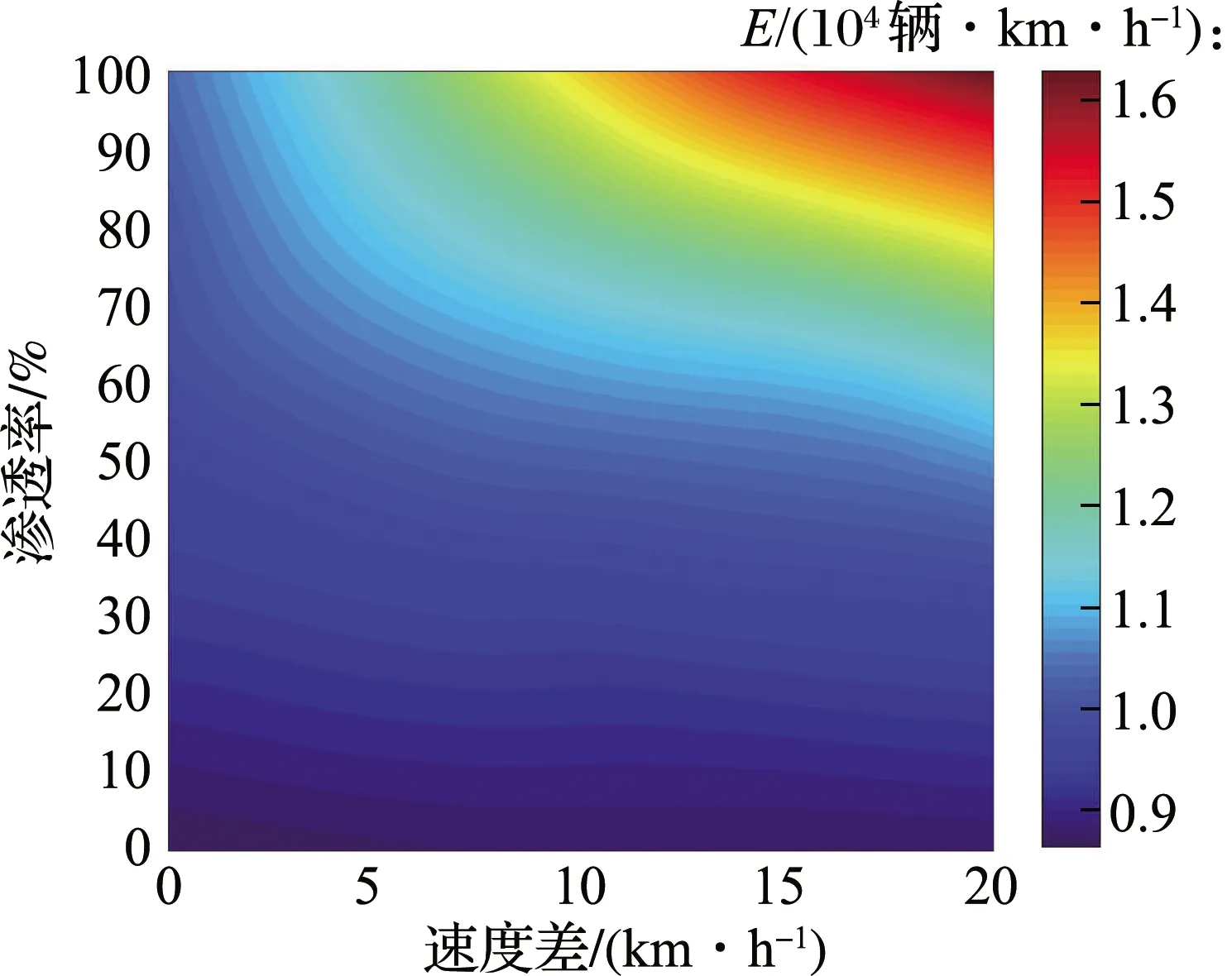
(a)低密度
中密度条件下通行效率的热力图如图3(b)所示.因为车辆数增多导致交通流平均速度的下降,速度差对通行效率的影响范围变小,集中在80%以上的高渗透率环境.而渗透率对通行效率的影响仍十分明显,相较于全HV环境,全AV环境使通行效率提高了122%.
3.2 交通安全分析
碰撞时间(TTC)的定义是,当后车速度大于前车时,如果两车保持此速度差,在发生碰撞之前的剩余时间.TTC被广泛应用于交通流安全评价领域,包括混合有AV的交通流环境中.
若前车n-1的速度小于车辆n的速度,则车辆n的TTC计算公式如下[20]:
(7)
否则,tTTC,n=∞.
在交通流中,每辆车存在的碰撞风险程度存在差别,因此常使用基于TTC的扩展评价指标,即暴露于危险状况下的总时间(TET)进行安全评价.TET计算公式如下[21]:
(8)

低密度条件与中密度条件下TET的热力图如图4所示.由图可知,在不同速度差条件下,随着渗透率的增大,TET值经历了一个先增加再降低的过程,低密度条件下在50%渗透率左右达到最大值,中密度条件下在60%渗透率左右达到最大值,这说明交通流的异质性对安全性的影响非常显著.此外,速度差对安全性的影响也是显而易见的,随着混合流速度差的增大,TET值呈现持续增长的趋势.由图4(a)可知,低密度情况下,在50%~70%渗透率范围内,TET的增长幅度最大,相较于无速度差情况,速度差20 km/h使碰撞风险增加了约10倍.由图4(b)可知,中密度条件下,速度差影响的TET范围变大,并且由于车辆数的增多,TET的值也远高于低密度情况.
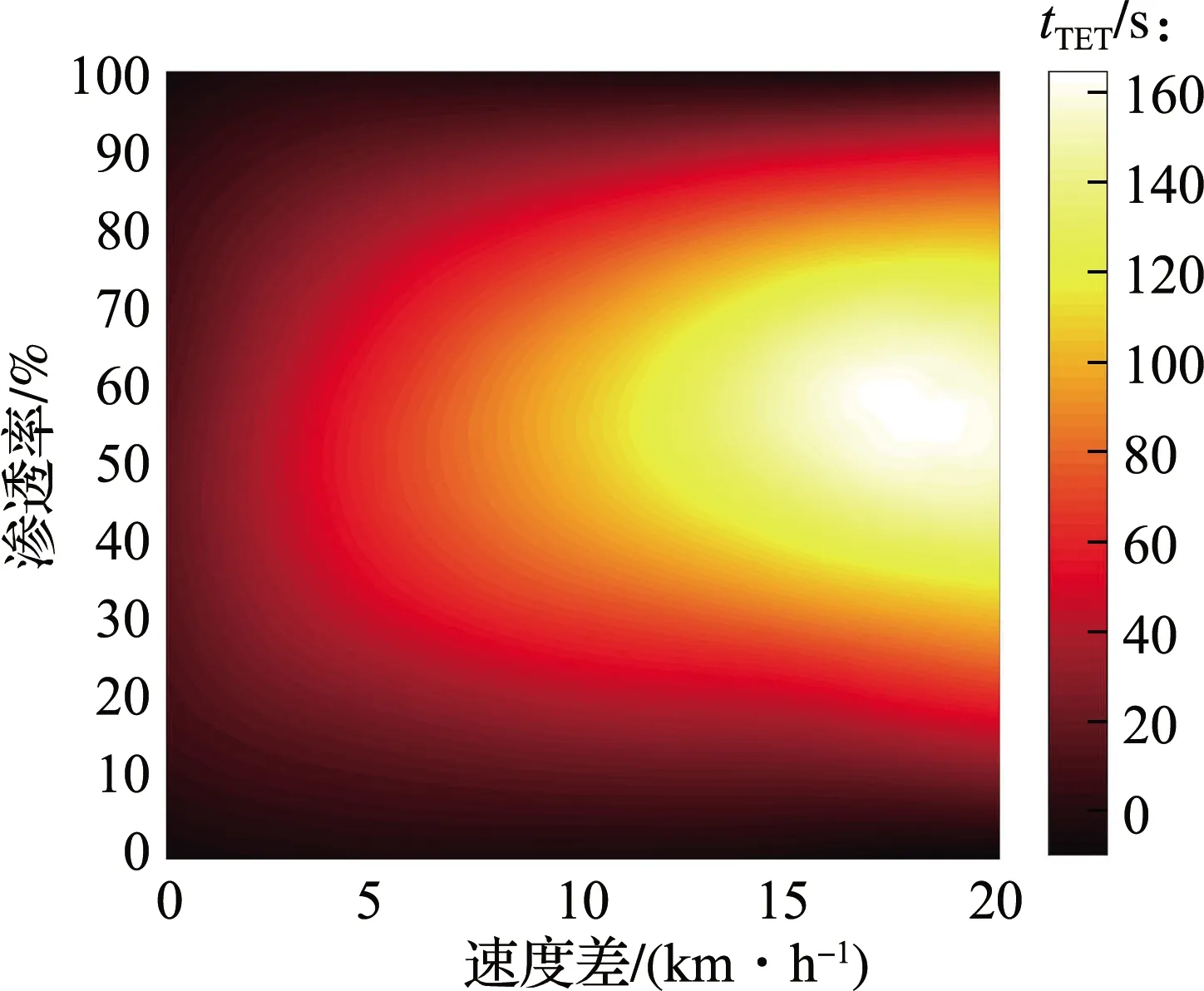
(a)低密度
3.3 燃油消耗分析
VT-Micro模型使用车辆当前时刻的瞬时速度与加速度计算瞬时油耗因子,被广泛应用于车辆燃油消耗的计算.VT-Micro模型[22]如下:
(9)
式中,Mn为车辆n的油耗因子;i为速度指数;j为加速度指数;ki,j为速度指数为i、加速度指数为j时的回归系数,通过ki,j的不同取值[23],可以统计每一时刻的燃油消耗.
本文依据式(9)统计所有的车辆在数据采集时间内的燃油消耗,再将其除以所有车辆行驶的总路程,得到燃油消耗指标.低密度条件与中密度条件下燃油消耗热力图如图5所示.
对比图5(a)、(b)可发现,中密度条件下燃油消耗略高于低密度条件.此外,无论是在低密度还是中密度条件下,燃油消耗都与AV渗透率成负相关,即AV渗透率越高,燃油消耗越少.在低渗透率条件下,随速度差增大,燃油消耗变化甚微,但在高渗透率条件下,随着AV速度的增大,燃油消耗反而呈现降低的趋势.这说明100 km/h相较于80 km/h,更接近于AV的经济车速.
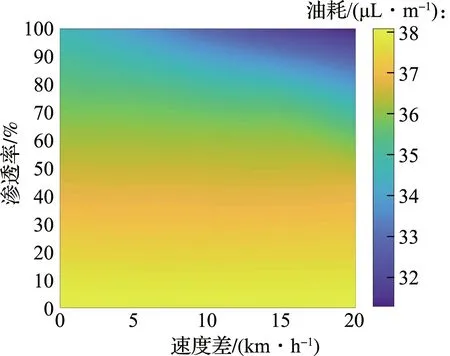
(a)低密度
3.4 舒适度分析
本文选取基于国际ISO 2631-1 标准的驾驶舒适性指标进行分析,其表达式为[24]
(10)
式中,am为第m个被统计到的车辆加速度;M为统计到的加速度总个数.
IC值越大,代表驾驶舒适性越差.低密度条件与中密度条件下IC的热力图如图6所示.
由图6(a)与(b)比较可得,随着车辆数的增加,舒适度降低,但总体趋势相似.随着AV渗透率的增大,驾驶舒适性呈现先降低再升高的趋势.渗透率在40%~80%的范围内,由于交通流异质性带来的不稳定,驾驶舒适性较差,并且随着速度差的提升,驾驶舒适度越来越低.
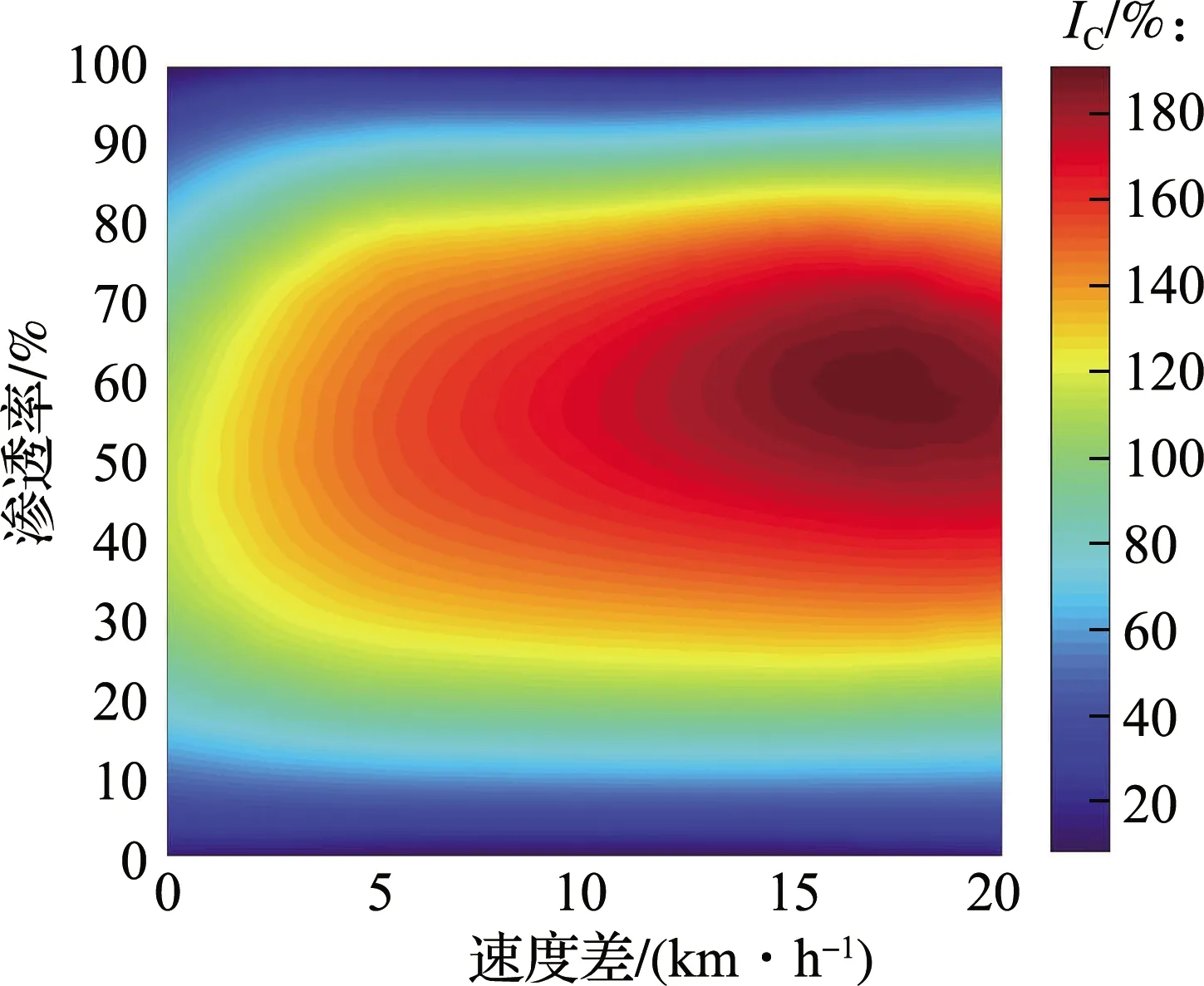
(a)低密度
为说明不同渗透率下舒适度随速度差的变化情况,选取30%、60%和90%三种渗透率,计算了低密度场景中以无速度差条件为基准,4个速度差下IC的增长率,结果见表1.由表可知,渗透率为30%时,舒适度陡降发生在速度差20 km/h,幅度为8.21%;渗透率为60%时,舒适度陡降发生在速度差15 km/h,幅度为29.12%;渗透率为90%时,舒适度陡降发生在速度差5 km/h,幅度为53.81%.可发现,随着渗透率提高,舒适度陡降点发生前移,且陡降幅度与渗透率成正比.这说明渗透率越高,舒适度对速度差的变化越敏感.

表1 3种渗透率下IC增长率随速度差的变化 %
4 结论
1)AV可以显著提高道路通行能力,增大临界密度.通过提高AV车速,增加的AV与HV速度差在自由流及临界流下可以提高道路通行能力,但幅度低于提升AV渗透率所导致的变化.
2)低、中密度条件下,AV与HV之间速度差的增加会提升通行效率,节省燃油消耗,但同时会降低交通安全性和舒适度.
3)速度差对交通流动态特性的影响与渗透率紧密联系.相较于低渗透率条件,高渗透率下各指标对速度差变化更为敏感.
4)本文研究可为混合驾驶环境下AV的速度决策和规划提供理论基础,但在场景建模时未考虑道路中存在大型车辆等其他因素的干扰,也未考虑AV专用道的情况,这些都有待进一步研究.
