土耳其伊斯坦布尔新机场线地铁列车总体设计
2022-04-16尚江傲赵小军蒋百威
尚江傲,赵小军,蒋百威
(1. 中车株洲电力机车有限公司,湖南株洲 412001;2. 大功率交流传动电力机车系统集成
国家重点实验室,湖南株洲 412001)
1 概述
土耳其伊斯坦布尔新机场线地铁列车由中车株洲电力机车有限公司自主研发,属于中国首个交付伊斯坦布尔的地铁列车项目。该车为重载高强度的全自动驾驶地铁列车,能够适应各种无人驾驶运行场景和机场线路不同时段高峰客流量的需求。其总体性能特点如下。
(1)是首个出口海外的120 km/h速度等级4节编组地铁列车,头车采用半动半拖(即一个转向架为带动力的动车转向架,另一个转向架为不带动力的拖车转向架)B型车辆,中间车采用全动力B型车辆,满足15 t大轴重要求。
(2)列车采用全自动驾驶设计和全自动车辆重联技术,可适应各种无人驾驶运营场景的需求和机场线路不同时段高峰客流量的需求。
(3)首次采用满足安全完整性等级2级(SIL2)的全新地铁列车控制系统,可使列车运行更加安全。
(4)装配适应大坡道、高牵引特性的列车牵引系统,满足长距离、大坡道、高加速度条件下的性能要求。
(5)采用高速条件下的低噪声技术,可满足隧道内客室最大噪声不超过78 dB(A)的要求。
(6)采用可满足欧洲最新EN 45545《铁路应用 铁路车辆防火》系列标准要求的长站间距(平均4 km,最长10 km)防火技术。
2 车辆总体技术性能
2.1 列车编组及受流方式
列车采用4节编组,编组形式为= A - B - B - A =,其中A车为带司机室的半动半拖车辆,B车为无司机室带受电弓的动车,=为全自动车钩,-为半永久式牵引杆,如图1所示。

图1 列车编组示意图(半列车)
车体采用铝合金V型断面,受流方式为DC1500V受电弓受流。
2.2 车辆主要尺寸及参数
本车的主要尺寸及参数如表1所示。

表1 车辆主要尺寸及参数
2.3 列车载客能力
列车载客数量为有座乘客与站立乘客数量的总和。每节A车与B车的额定座位均为30个,因此4辆编组列车的总座位数为120个。对于站立乘客数量的计算,应首先推算出站立区面积,再由此得出不同工况下的站立乘客数量。欧洲标准EN 15663-2017《铁路应用 车辆参考质量的定义》中规定,在计算列车载客量时,乘客在车内停留的区域中地板与天花板之间的高度不应小于1 850 mm,站立区面积为车厢面积减去座位面积及座位前方为乘客脚部预留的300 mm宽空间面积。根据EN 15663-2017规定进行计算可得,本车A车的站立区面积为28.5 m2,B车为32.4 m2,整列车为121.8 m2。由此可知,整列车在各工况下的载客能力如表2所示。

表2 列车在各工况下的载客能力 人
2.4 列车动力性能参数
(1)列车运行速度。列车最高运行速度为120 km/h,车辆构造速度为132 km/h。
(2)特殊场景下的车辆限制速度。当车辆反向行驶时,车辆速度自动限制为不高于5 km/h;在洗车模式下,车辆速度限制为不高于3 km/h。
(3)车辆加速度。在平直干燥轨道上,车辆在AW3载荷下从静止加速到40 km/h的加速度为1.1 m/s2,从静止加速到100 km/h的加速度为0.5 m/s2。
(4)制动减速度。车辆最大常用等效制动减速度为1.1 m/s2,紧急制动等效减速度为1.3 m/s2。
2.5 全自动无人驾驶
列车各系统及控制功能满足自动化等级4级(GoA4)的全自动无人驾驶要求,而且列车兼容开通初期进行有人驾驶操作、后期开展全自动驾驶所需的技术,可以实现在既有线路和新线全自动无人驾驶、互联互通运营的要求。
在全自动无人驾驶模式下,列车可在运营控制中心(OCC)的统一监控下,实现自动唤醒、自动整备、自动自检、自动运行、自动故障诊断、远程控制及隔离、自动对位停车、自动休眠待机等功能。
2.6 全自动车辆重联运营
本车车头最前方的车钩采用全自动车钩,并配置重联模块,可实现2列4辆编组列车重联运营。配置列车级网关的车辆支持动态重联(无需断电)。车辆内部所有数据通过车辆总线传输,车辆与车辆之间利用绞线式列车总线(WTB)交互数据,连接采用标准D-sub连接器。WTB具备如下特点:
(1)介质为屏蔽双绞线;
(2)波特率为1 Mbps;
(3)跨距860 m;
(4)最多挂接22辆车或32个节点;
(5)过程数据基本周期为25 ms;
(6)为双通道冗余。
3 关键系统和部件设计
3.1 主电路及牵引系统
4节编组列车设置有2台受电弓。正常运行时,2台受电弓升起,受电弓母线隔离装置断开,接触网中的DC1500V电压经过受电弓接入车辆,并各自通过相应高压设备箱中的三位置选择开关接入高速断路器与辅助逆变器熔断器,再经过高速断路器接入牵引逆变器。受电弓可在列车电压过低时自动升弓,为列车取电。在GoA4全自动无人驾驶模式中,当单个受电弓故障时,列车向OCC发送报警,此时列车可以利用1/2牵引动力继续运行;若需要维持全部牵引动力,则由OCC控制列车停车,此时列车将自动隔离故障受电弓,并自动闭合母线隔离装置,使母线贯通,从而实现全动力运行。
列车牵引系统包括高压电器设备、高速断路器、牵引电机、牵引逆变器、避雷器、制动电阻等部件。列车的每个动力转向架均配备牵引逆变器和单独的控制系统。牵引系统主电路如图2所示。

图2 牵引系统主电路图
为适应本线路坡道大、所需牵引力强的特性,列车牵引动力配置为头车采用半动半拖车辆、中间车采用全动力车辆,可满足长距离、大坡道、高加速度条件下的性能要求。
此外,牵引系统还负责实施列车的电制动并对电制动过程中产生的再生能量进行回收。回收的能量通过高速断路器、三位置选择开关及受电弓优先反馈给电网,剩余的输入制动电阻。
列车牵引/电制动特性曲线如图3所示。

图3 列车牵引/电制动特性曲线图
3.2 辅助变流系统
辅助变流系统的功能是为列车各电气设备提供AC380V、DC110V电源。其中,辅助逆变器将接触网DC1500V电压通过DC/AC隔离转换为AC380V电压,为列车的空气压缩机、风机等负载供电;充电机将辅助逆变器转换的部分AC380V电压转换成DC110V电压,为列车照明、控制等系统供电。
辅助变流系统设备配置如表3所示。

表3 辅助变流系统设备配置表 套
3.3 列车控制与管理系统(TCMS)
TCMS分为列车控制级系统和车辆控制级系统2部分。
列车控制级系统采用WTB控制,具备动态重联功能,可实现编组与编组之间的数据交换。车辆控制级系统采用多功能车辆总线(MVB),4节车辆为1个编组(= A - B - B - A=),每个编组内的各车载系统,如中央控制单元(CCU)、事件记录仪(ER)、中继器(REPs)、输入输出单元(IOM)、人机接口(HMI)、能耗记录仪等,均通过MVB进行数据交互。
单编组列车(= A - B - B - A=)的TCMS网络拓扑结构如图4所示。其TCMS采用双通道冗余设计。
3.4 制动系统
本车的制动系统采用在世界范围内有良好运行业绩及成熟运营经验的EP2002架控制动系统,该系统可满足120 km/h速度等级下的制动性能要求。该系统由VV120型活塞压缩机、EP2002制动控制阀及轮式盘形制动器、辅助控制模块、空簧控制装置、升弓控制装置等组成。其电空制动系统为模拟式制动系统。
此外,牵引系统还可实施电制动(包括再生制动与电阻制动),并将再生制动产生的能量优先反馈给电网。
3.5 转向架
列车的每节车配有2个新开发的、适用于B 型车、最大轴重为15 t的转向架,动车转向架和拖车转向架结构基本相同,转向架的主要技术参数如表4所示。

表4 转向架的主要技术参数
列车端部第1个转向架前端安装障碍物检测装置。该装置由车下障碍物检测装置和车上障碍物检测主机2 部分组成,负责检测和清除轨面上的障碍物。在检测到障碍物碰撞后,该装置会将检测数据发送给TCMS,并由TCMS将数据上传至OCC,然后OCC将结合其他系统获得的信息确定列车是否继续运营或者是否派人到现场进行处理。若碰撞的障碍物尺寸小于设定阈值,由检测装置的检测横梁将障碍物清扫出轨道路面;若大于设定阈值,则断开列车制动安全回路,触发列车紧急制动。
每个转向架上设置1套非接触式脱轨检测系统(包含2个传感器),用于检测列车车轮是否紧贴轨道运行。若同一转向架上的2个传感器同时被触发,则可判断该转向架脱轨,然后该系统将通过声光报警通知OCC。
3.6 车钩及贯通道
列车车钩采用全自动车钩,由连挂系统、控制系统、压溃管、过载保护装置和缓冲系统等组成,如图5所示。
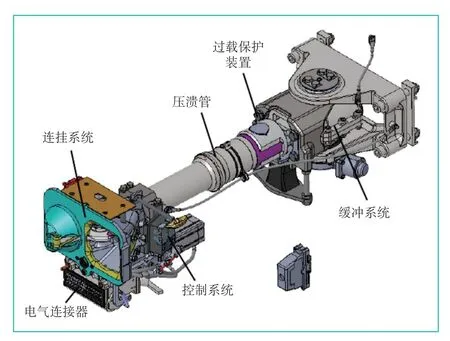
图5 全自动车钩
贯通道由折棚、侧护板、顶板、渡板、踏板及其支撑等组成,其主要技术参数如下:(1)通过宽度为1 300(0,+15) mm;
(2)通过高度(即顶板与内装地板面距离)为
1 920 ( - 10,+10)mm;
(3)隔声量为36 dB;
(4)可通过曲线为半径不小于110 m的单曲线以及150 m - 10 m - 150 m的S形曲线。
3.7 司机室
司机室操纵台安装在列车两端,为全封闭结构,设置可拆卸盖板,下部做成柜式,左右安装设备,中部留藏座椅及司机腿部活动空间。司机座椅为隐藏式座椅,无人驾驶时可收进操纵台内。
司机室区域设置隔离带,用于紧急情况下与乘客隔开,车辆正常运营状态下隔离带藏于边柜中。
3.8 空调及通风系统
列车空调机组安装在车厢顶部,风道布置于中顶板上方,空调控制单元安装于低压柜中。司机室采用风道送风,司机室足部取暖器安装在司机室操纵台下方,每种车型的空调及通风系统配置清单如表5所示。
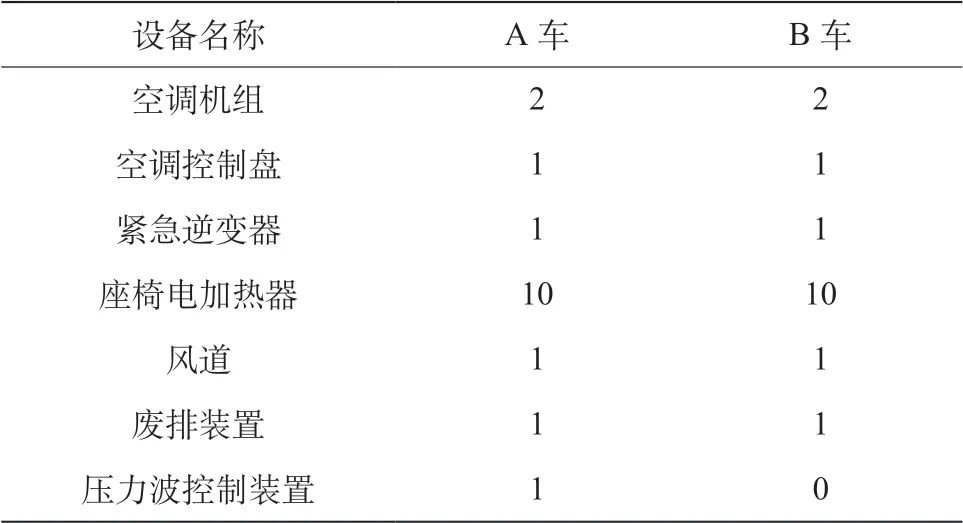
表5 空调及通风系统配置清单 套
空调及通风系统的设计可保证客室内空气的均匀分配、客室内气流流动路线的合理性,以及送入客室的冷/暖风与客室内空气的充分混合,以形成均匀的温度场和速度场。
列车两端司机室中各设1套压力波控制装置(含压力波探测器和控制器),每个新风口设置1套新风压力保护阀,每台废排装置内设置1套废排压力保护阀。当车内外压差变化超过200 Pa/s、1 000 Pa/10 s时,列车压力保护系统启动,安装在司机室中的压力波控制装置驱动各车空调控制盘动作,关闭各车的新风/废排压力保护阀,阻止车外压力波传入车内。
3.9 车门系统
每节车每侧设置4扇双开电动塞拉门,同车车门间距为4 560 mm,相邻车辆车门间距为6 300 mm。其功能是在各种驾驶模式下控制列车车门的打开和关闭:全自动驾驶模式下,由车载ATC系统发出开/关门的指令,车门系统执行自动开/关门操作;在列车自动驾驶(ATO)或自动防护(ATP)模式下,车门系统可实现ATC系统控制的自动开/关门、ATC系统控制的自动开门/手动关门、手动开/关门3种功能间的切换;在车载ATC系统被切除后,列车开/关门不受ATC系统控制,可进行手动开/关门。
为适应无人驾驶场景,每扇车门均设置了具有远程解锁请求功能的紧急解锁装置,以便在紧急情况下开启车门。其操作受到OCC和司机的监控。具体操作步骤如下:先拆下紧急解锁装置罩板,拉下手柄,发出解锁请求;在获得OCC或司机许可(此时紧急解锁装置自带的指示灯会点亮)且车速为0时,再次拉下手柄,解锁车门,手动开门。
3.1 0 乘客信息系统
列车乘客信息系统(PIS)包含列车以太网总线、备用音频总线。其广播、显示、视频监控等功能由以太网总线实现,若以太网总线发生故障,则启动备用音频总线,用于实现OCC对列车的广播。列车配置的车载广播电视系统可用于播放广告、新闻等视频。此外,每节车配置6块独立于PIS组网的18.5寸高清显示器;每列车配置1台数字信息播放设备及天线,其可输出M12接口形式的视频流信息,以便显示屏接入并流畅播放。PIS的网络拓扑如图6所示。
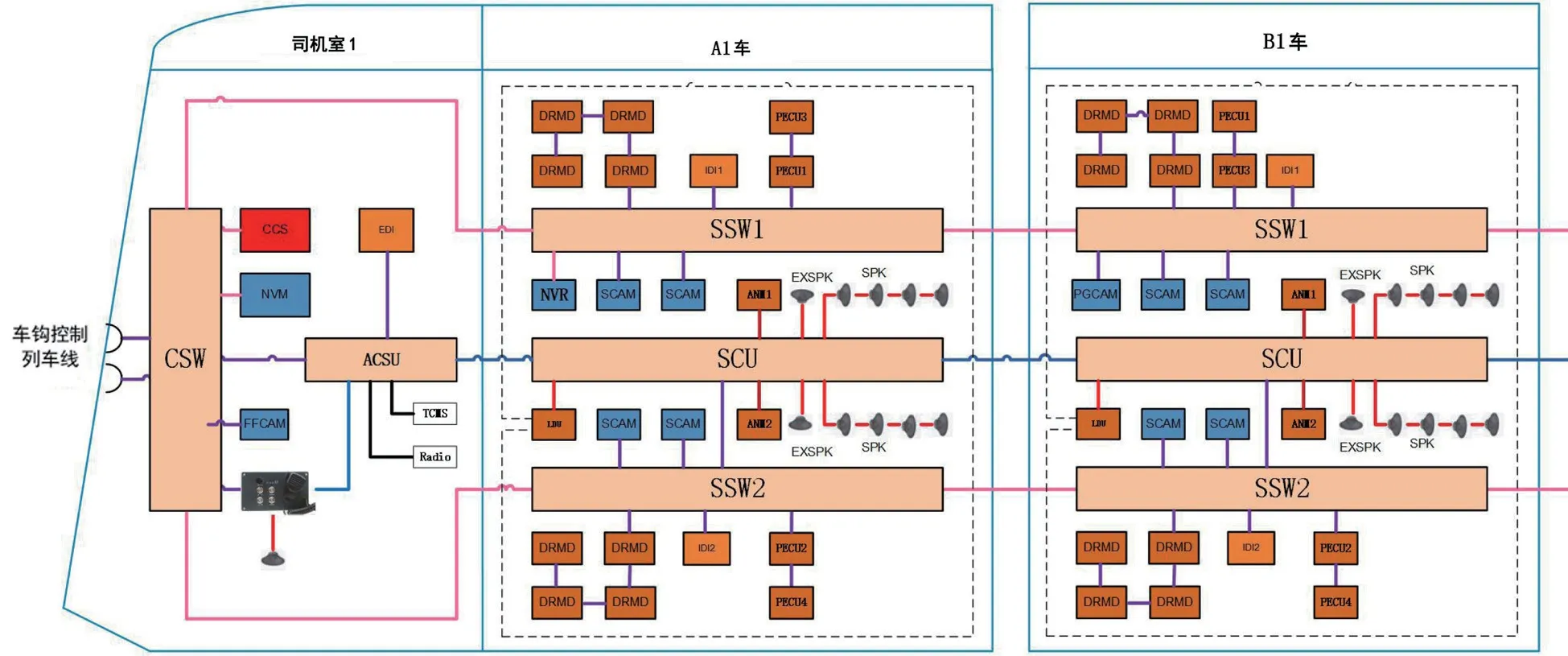
图6 PIS网络拓扑图(半列车)
4 列车防火安全设计
火灾是威胁地铁列车运行安全的重要风险因素之一,包括意外疏忽引起的火灾和技术缺陷引起的火灾2类。地铁列车防火是一项系统工程,贯穿于其全寿命周期内。防火安全设计的目的是降低列车起火的概率,并在火灾发生后迅速控制住火势蔓延,保护乘客及工作人员的人身安全。列车防火安全设计应从火灾预防和火灾控制2方面展开,如图7所示。

图7 列车防火安全设计
4.1 防火设计及其依据
土耳其伊斯坦布尔新机场线地铁列车设计人员依据各种相关的国际标准和规范进行了如下防火安全设计。
(1)防火措施操作类别(OC)。根据EN 45545-1-2013《铁路应用 铁路车辆防火 第1部分:总则》将本车的OC定义为OC2。
(2)车辆材料火灾危害等级。根据EN 45545-2-2020《铁路应用 铁路车辆防火 第2部分:材料和零件的防火性能要求》确定本车材料火灾危害等级为HL2。
(3)非金属材料防火等级。根据所应用材料的不同,分别对各个部件进行防火性能设定,各种材料均须满足EN 45545-2-2020中 HL2等级的要求。
(4)耐火结构性能。本车车辆结构满足EN 45545-3-2013《铁路应用 铁路车辆防火 第3部分:防火隔板的耐火要求》中表1防火隔板的要求,车内大功率电气柜(功率大于20 k W)、地板结构等的耐火性能达到E15、I15等级要求。
(5)火灾初期车辆防火安全性。本车符合EN 45545-4-2013《铁路应用 铁路车辆防火 第4部分:铁路车辆设计防火安全性要求》中对于车辆防火安全性的要求。
(6)电气设备防火安全性。本车符合EN 45545-5-2013+A1-2015《铁路应用 铁路车辆的防火保护 第5部分:无轨电车、有轨电车和磁悬浮列车电子电气设备的防火安全要求》中对于车辆电气设备防火安全性的要求。
(7)灭火措施。本车司机室、客室内均配置ABC干粉灭火器。
(8)火灾控制和管理系统。本车符合EN 45545-6-2013《铁路应用 铁路车辆防火 第6部分:火焰控制和管理系统》中对于车辆火灾控制和管理系统要求。
(9)应急设备及其功能维持性。根据EN 45545《铁路应用 铁路车辆防火》标准系列和EN 50553-2012+A1-2016《铁路应用 铁路车辆火灾条件下的运行能力要求》,对本车与疏散安全和应急处置相关的系统和设备进行完整性设计,包括通信(含乘客紧急报警装置、客室广播系统,以及与ATC或OCC通信的设施等)、牵引、制动、车门、列车总线、紧急照明、火灾探测、应急供电(蓄电池在寿命期限内应满足45 min紧急负载供电要求)等系统,以保证其具有足够的耐火完整性或冗余度。
4.2 火灾报警系统
本车的火灾报警系统可满足无人驾驶要求:火灾报警控制器支持控制器局域网(CAN)及MVB通信,客室安装烟温复合探测器,车下辅助逆变器箱、牵引逆变器箱等高压箱内配置感温电缆。当探测到火情或者温度超过阈值时,各传感器可通过通信网络向火灾报警控制器传送信号,火灾报警控制器在开启本地信号灯进行提示的同时,通过MVB将信号传送给TCMS。
在列车全自动无人驾驶模式下,火灾报警系统运行过程包括系统自检、设备故障检测和火灾报警3部分。
(1)系统自检。系统上电后进行自检操作,在LCD显示屏上显示“正在自检”。系统可自动检测火灾报警控制器本身及各探测器的运行状态,并显示其详细状态信息。对于检测到的故障信息进行本地报警,同时将故障信息传送给列车网络系统。火灾报警控制器能够手动检查其面板指示灯等显示功能。
(2)设备故障检测。当系统检测出探测器通信故障、感烟故障、感温故障、感温线缆故障、本底值故障、CAN通信故障、RS485总线故障时,则通过火灾报警控制器MVB接口与TCMS进行通信,上报设备具体故障状态及故障发生位置。
(3)火灾报警。探测器在检测到火灾隐患后会通过CAN总线环路将火灾报警信号传送给火灾报警控制器。若为第一次报警,火灾报警控制器会先记录该信号,然后继续轮询其他探测器的状态;若该信号持续存在,则火灾报警控制器会自动开启其液晶显示屏,并在显示屏中显示火灾信息(包括火灾位置、类型、发生时间),此时“火警”指示灯常亮,火警输出触点导通。
5 结语
土耳其伊斯坦布尔新机场线地铁列车采用多种先进的关键技术,可满足长距离、大坡道、高加速度条件下的性能要求。列车已于2021年11月投入使用,最高运行速度达到120.75 km/h,在运行过程中展现出安全、高速、舒适的优异性能,获得土耳其交通部长及当地社会的高度赞誉。在未来30年内,这条地铁线路将在道路维护、节能减排等方面为土耳其节省约301万美元(2 920万土耳其里拉)的费用支出。
