基于预平均处理的导航信号捕获技术
2022-04-14赵丙风章林锋孙寿浩
赵丙风,章林锋,孙寿浩
(1.中国电子科技集团公司第五十四研究所,石家庄 050081;2.32021 部队,北京 100094)
0 引言
卫星导航定位系统是以人造地球卫星作为导航台的星基无线电导航系统,可以提供全天侯定位、测速和授时(PNT)服务.目前全球卫星导航系统(GNSS)主要包括北斗卫星导航系统(BDS)、美国的全球定位系统(GPS)、欧盟的伽利略卫星导航系统(Galileo)以及俄罗斯的格洛纳斯系统(GLONASS),除此之外还包括日本的准天顶卫星系统(QZSS)和印度的区域导航卫星系统(IRNSS)[1].导航信号的PNT 服务依赖信号稳定跟踪与电文解析,事实上,在实现卫星导航信号跟踪之前,首先要完成信号捕获,其目的是为了获取卫星导航信号的载波频率和伪码相位的估计值[2].
典型的捕获算法主要包括线性搜索、并行频率搜索、并行码相位搜索[2].线性搜索是利用相关器在时域内对所指定卫星信号的多普勒和码相位进行扫描式搜索,实现简单、资源消耗低,但是捕获速度慢,不适用于长码捕获;并行频率搜索在串行搜索的基础上,通过快速傅里叶变换(FFT)将信号载波搜索由时域转换到频域进行,由串行搜索转换为并行搜索,通过增加资源的方式加快了搜索速度;并行码相位搜索类似于并行频率搜索,通过FFT 方式将串行码相位搜索转化并行搜索,降低搜索次数,提高捕获速度.
近年来,随着导航接收机硬件平台的快速发展,目前导航接收机多采用资源丰富的现场可编程门阵列(FPGA)、数字信号处理器(DSP)等作为核心器件开发,资源不再是接收机捕获性能的主要限制条件,更多的研究致力于提高导航信号的捕获速度、捕获灵敏度等方面.其中研究较多的是部分匹配滤波+快速傅里叶变换(PMF-FFT)捕获方法[3-4].PMF-FFT 算法是一种基于频率并行搜索的快捕算法,在对载波频率进行搜索的同时还对码相位进行搜索,缩短了捕获时间,非常适合在捕获时间要求严格的高动态环境中使用.但PMF-FFT 算法也存在资源消耗大、积分长度受限、捕获多普勒分辨率低等问题,文献[5-10]从不同的角度对PMF-FFT 算法提出性能改进措施.
针对PMF-FFT 算法存在的问题,本文提出一种基于预平均处理的变系数匹配滤波改进方法,克服了传统匹配滤波器硬件消耗资源较多的问题,同时解决传统信号捕获方法得到的多普勒分辨率低,转跟踪后牵引时间较长的问题,并针对现有四系统兼容信号实现捕获算法,通过灵活可配置的捕获参数实现现代多模多频导航信号的高灵敏度快速捕获,将该算法成功应用到专用集成电路(ASIC)项目设计当中.
1 信号接收概述
多频多模是现代化导航接收机的主流发展方向,随着四大导航系统的建设完善,尤其是随着BDS 的建设与开通,兼容互操作将是提供高性能导航服务的重要途径.本文研究信号类型包括了北斗B1I、B1C、B2a、B2b、B3I 信号;GPS L1C/A、L1C、L5C 信号、Galileo E1OS、E5a、E5b 信号;GLONASS G1、G2 信号.以上信号既包括传统的二进制相移键控(BPSK)调制信号,也包括兼容互操作的二进制偏移副载波(BOC)调制信号和正交相移键控(QPSK)调制信号.
由表1 可知,现代导航接收机要处理的信号调制类型不同、信号带宽不同、信号周期长度不同,因此在设计捕获算法的时候要做到根据待捕获信号的特点进行捕获方式配置.

表1 信号参数
其中QPSK 和BOC 调制类型的信号包含数据支路与导频支路,且两个支路相互正交.
导航卫星发射的信号可以写为
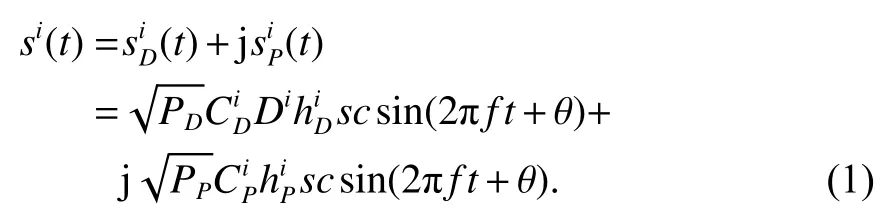
式中:i表示卫星号;X表示不同的信号频点;j 是虚数单位;是信号实部,代表信号的数据支路;是信号的虚部,代表信号的导频支路;表示正交和同相分量的发射功率;表示信号主码;Di表示信号电文;表示信号辅码,如B1C 的辅码、L5C 的NH 码等;sc表示信号子载波,仅在BOC调制时有效;f为信号频率;θ 为信号初相.
导航信号接收首先经过射频处理,图1 给出一种典型的导航接收机射频前端处理流程[2],依次分为射频信号调整、下变频混频、中频信号滤波放大、模数转换几个主要阶段.
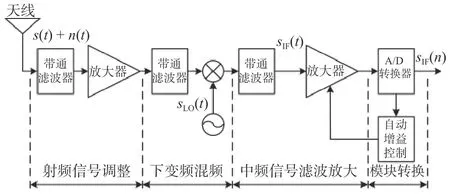
图1 典型射频前端处理流程
其中由天线接收到的卫星i的信号si(t)经过下变频和模数转换(ADC)得到数字中频信号

式中:φ(n)为信号接收相位;分为数据支路和导频支路的接收幅度,表示为:

2 PMF-FFT 算法分析
2.1 捕获框架
经过射频前端的处理,得到采样后的数字中频信号sIF(n).导航捕获模块将sIF(n)与本地载波数字控制振荡器(NCO)产生的估计载波信号相乘以剥离载波,得到导航基带信号;对基带信号进行下变频和降采样等处理,将处理后的数据送入PMF-FFT 模块,进行捕获核心部分的处理.经过PMF-FFT 处理,完成待捕获信号的码相位和多普勒频偏的估计值,完成捕获检测.图2 为PMF-FFT 算法的捕获流程[3].
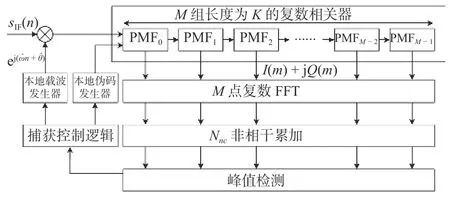
图2 PMF-FFT 的捕获流程图
每个PMF 滤波器长度为K个信号主码码片,M个PMF 滤波器相干积分结果进行M点FFT 运算,则每个匹配滤波器的相干积分时长为

捕获使用的总相干积分时间为

式中,Rc为信号的主码速率.
为延长积分时间,对FFT 的计算结果进行Nnc次的非相干累加,以延长总的积分时间,提高检测概率,捕获总积分时间为

其中每个相关器的输出结果记为

相关器输出向量的幅度Ar(m)和相位φe(m)可以写作:

式中:D(m)表示电文,其值在相干积分时间之内保持不变,为±1;h(m)为信号辅码,其值在捕获相干积分之间之内保持不变,为±1;Rc(τ)为信号主码的自相关函数.
2.2 FFT 的频率响应
FFT 的作用是将每个输入的复信号r(m)在每个输出频率上循环,在M个不同的频率上形成多普勒的并行相关搜索[4].第i个FFT 输出频率的表达式为

第i个FFT 输出的频率为

每个FFT 输出频率的功率相应为

FFT 结合相干组合匹配滤波器的相干损失为

所以当捕获频率在两个FFT 频点之间时引起的损耗为3.92 dB.图3 为M=16 时的FFT 响应主瓣.
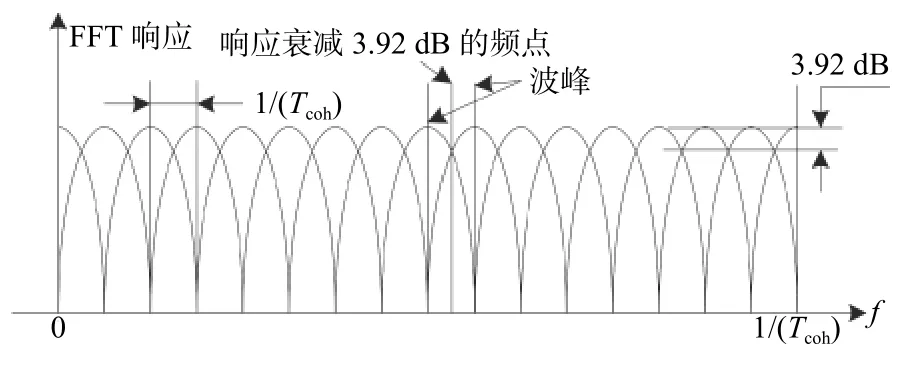
图3 无补零FFT 的输出主瓣响应
2.3 FFT 的补零
为了降低相关损耗,同时提高捕获FFT 的频率分辨率,实际工程应用中一般会进行补零操作.图4为补零FFT 的响应图.
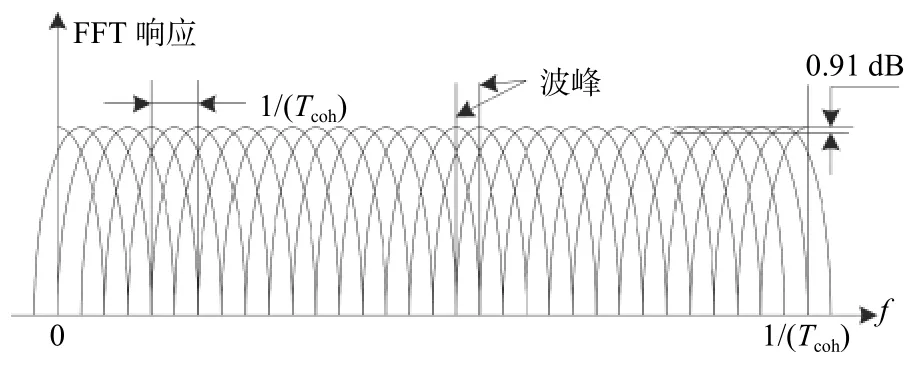
图4 补零FFT 的输出主瓣响应
在相同匹配滤波器数量的条件下,补零FFT 运算点数是无补零的两倍,需要在FFT 输入端增加与匹配滤波器相同数量的零点.补零后FFT 输出的频率间隔是无补零的一半,提高了捕获的多普勒分辨率;补零后的相干损耗由无补零的3.92 dB 下降到0.91 dB.补零虽然使FFT 运算点数加倍,但获得了3 dB 的相干增益,在现代接收机中是非常有益的.
3 预平均变系数匹配滤波算法
本文中为了适配多种信号的兼容捕获处理,提供一种基于中频信号预平均处理的变系数匹配滤波捕获算法,图5 为其捕获结构框图.
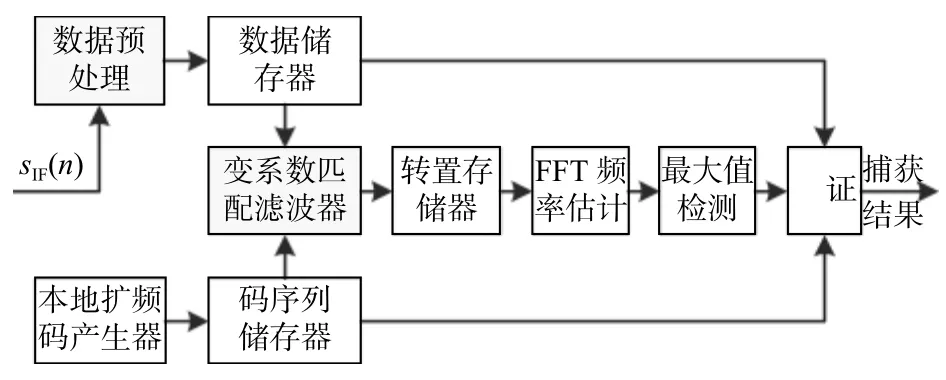
图5 信号捕获框图
3.1 数据预处理
数据预处理主要完成数字中频信号的下变频、低通滤波、降采样与预平均处理,图6 为处理流程图.
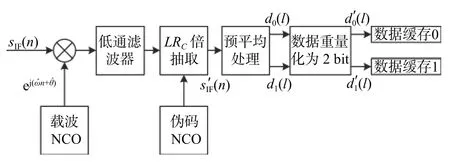
图6 中频信号预处理流程图
其中抽取部分将中频信号采样率抽取为L倍信号主码速率,其中L在信号主码速率Rc不同时取值不同,如下式
式中:Rc为导航信号主码速率;L的取值由捕获控制软件配置本地伪码NCO 的步进值实现.
预平均处理操作过程如式(15)所示:
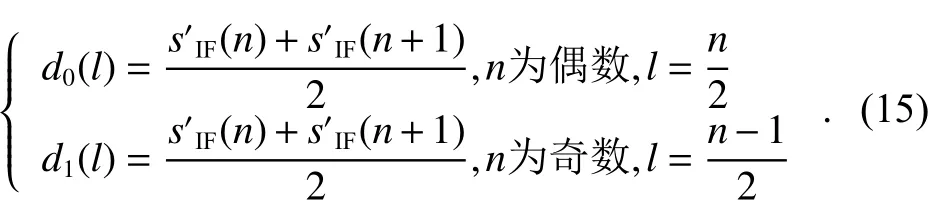
预平均处理之后,为了减少数据的存储量,需要将中频数据按照两比特符号-幅值(sig-mag)进行量化
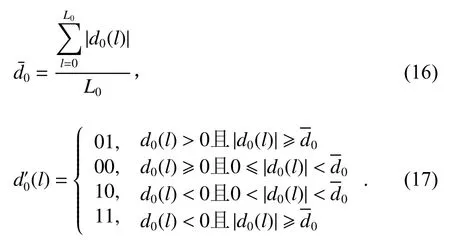
式中:L0为中频数据平均长度,单位是采样点,取值由捕获控制控制;的重量化过程与一致.
预处理完成后,每个中频数据采样点包含了抽取后两个中频数据采样点的信息,所以在相同积分时间的条件下,相关器的数量减少一半,节省了相关器资源;同时,因中频数据存储为2 bit sig-mag 形式,同4 bit 中频量化相比,硬件资源消耗减少一半.
3.2 变系数匹配滤波
变系数匹配滤波器的简化结果如图7 所示,其相关器长度为K,滤波系数为待捕获信号的主码,初始值为全零,每一个时钟变换其中一个系数,其他保持不变,每个时钟输入一个数据样点,对应的输出一个相关结果.分别与K个滤波系数相乘后,再与前一级缓存中的中间结果相加存入本级的缓存中,第K级的结果作为滤波器的输出.
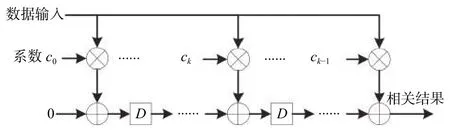
图7 变系数匹配滤波器框图
匹配滤波器开始工作后,第l时钟时刻,第m个滤波器系数与主码之间的关系时如下:
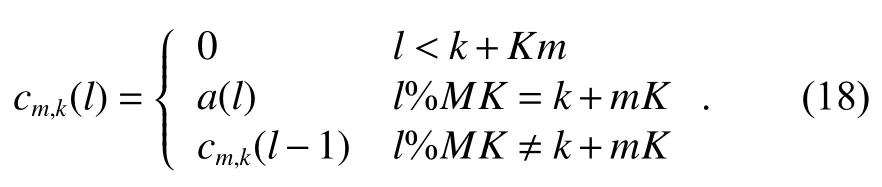
式中:cm,k(l)为第l时钟时第m个滤波器的第k个系数;a(l)为待捕获信号主码;k的取值范围是0~K–1;m的取值范围是0~M–1;l的取值范围Lc取决于当前捕获的相干积分时间Ttotal、信号主码速率Rc

对于B3I 信号,设置的变系数匹配滤波器长度K=320;滤波器数量M=64 ;FFT 为1 倍补零运算,点数MFFT=128 ;非相干累加次数Nnc=8;则存数的主码长度Lc=173 910 码片.
对于式(18),当M=2、K=3 时,每一时刻,滤波器系数的变化过程如下所示:

第l时钟时刻,第m个变系数匹配滤波器输出结果为

式中,l的取值范围是l≥MK,当M个滤波器均有相关结果输出时,启动FFT 计算进行并行频率计算.
匹配滤波器运算启动后,每个时钟进入一个数据和一个伪码,依次完成相关运算,经过MK个时钟后,M个滤波器完成单次匹配运算,结果暂存到转置存储器中,开始进行FFT 运算,单次运算搜索M个主码相位,经过K次FFT 运算,完成所有主码相位的搜索,同时启动下一组匹配滤波运算.表2 给出了M=2、K=3 时的运算过程.
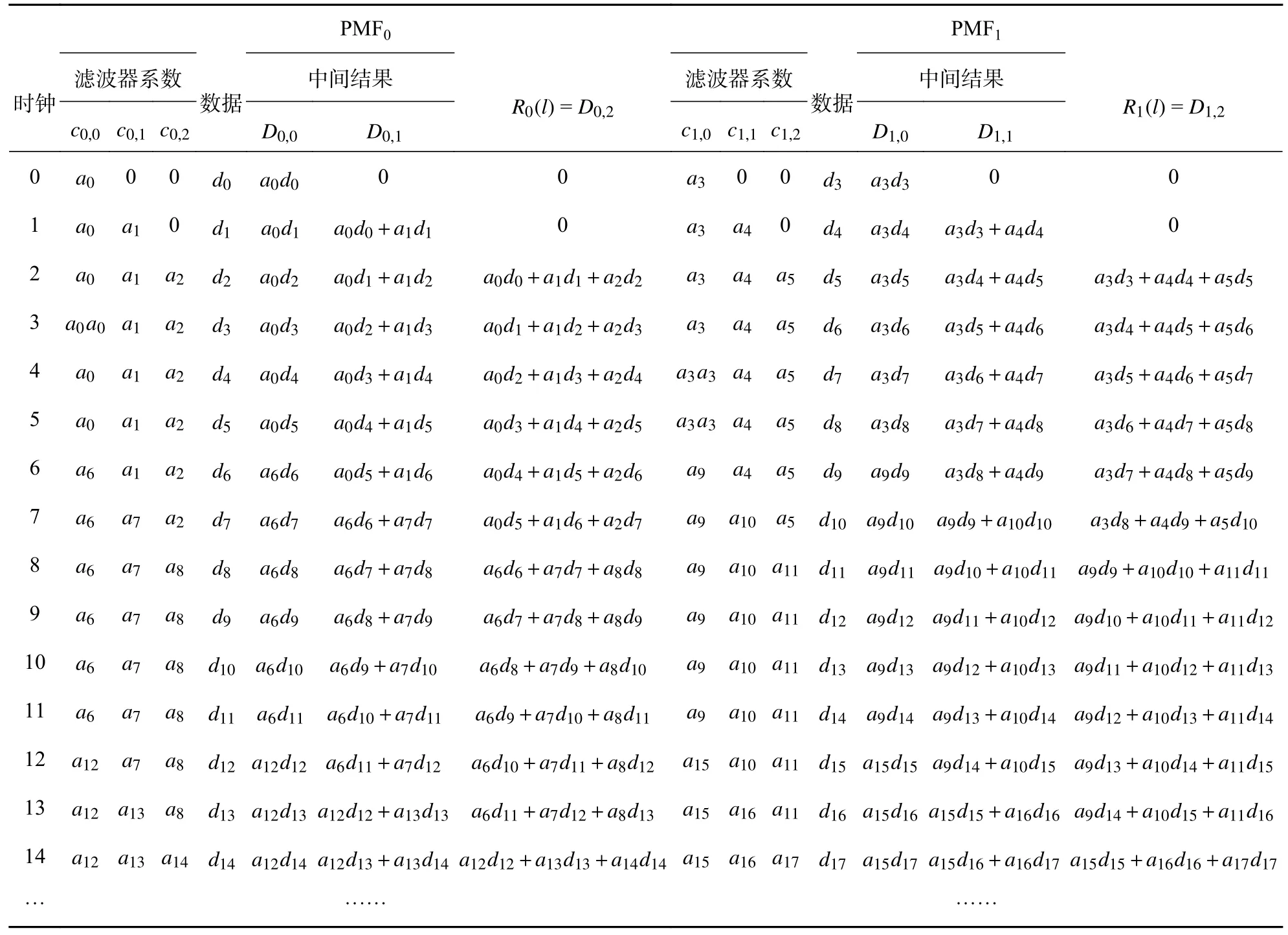
表2 M=2、K=3 时匹配滤波计算过程示意

式(21)给出了典型的M个K阶匹配滤波器的输出序列,每一列是同一个主码相位的部分匹配相关结果,前后两列结果之间相差一个主码相位,每一行为一组,分别对应了K个不同的主码与中频数据之间的相位.
3.3 FFT 运算最大值检测
匹配滤波结果将会暂存到转置存储器中.转置存储器包含两个RAM 模块,与中频数据缓存一一对应,形成捕获过程中中频搜索的乒乓操作.输入存取器的时候按行存储,从存储器输出的时候按列读取,从而实现数据的转置存储.变系数匹配滤波器输出的数据每M×K个为一帧,存储完成后按每个码相位对应的数据存储地址读取数据,送入FFT 频率估计器.
FFT 频率估计器对送入的一帧相关数据进行FFT 运算,并得到一帧结果的最大值.FFT 采用基2 流水线处理方式实现1 点输入、1 点输出的MFFT点FFT 运算,FFT 运算分多级完成.对于B3I 信号,采用的MFFT=128,FFT 运算分成七级.
3.4 最大值检测与捕获验证
最大值检测模块对FFT 模块输出的复数序列按照实部平方与虚部平方之和求得能量,然后得到其中的最大值,并计算出最大值对应的码相位和频率的索引值.
验证模块对最大值进行第二次验证,根据最大值对应的码相位计算出验证模块的起始时刻,根据频率的索引值设置验证模块的本振频率,将验证后的结果与设定值进行比较,当二者的比值大于设定的门限值时,则捕获成功.
为了提高多普勒分辨率,验证模块有3 路本振频率,分别是最大值对应的频率值、最大值对应的频率值±100 Hz;用3 路本振频率积分得到3 个积分值,取最大值作为验证的相关结果Rveri,并将Rveri与设定捕获阈值Rth进行比较,当Rveri≥Rth时,则捕获成功,则转入信号跟踪阶段,同时结束当前捕获,继续搜索下一颗卫星;若Rveri<Rth,则进行下一轮捕获.一轮搜索完成个M码相位,下一轮捕获时,数据存储器的地址在上一轮初始值的基础上增加M,总共需要进行捕获K轮搜索,如果搜索完所有的码相位,仍没有大于捕获阈值Rth的相关搜索结果,则捕获结束,继续捕获下一颗卫星.图8 给出了完整的搜索控制流程.
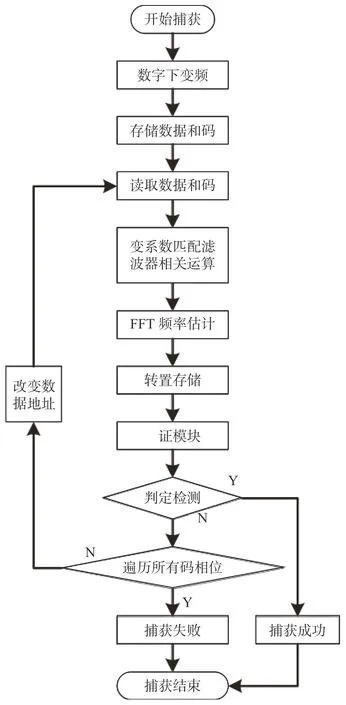
图8 捕获实施流程图
4 算法实施效果
4.1 资源消耗
针对自有ASIC 原型验证平台实现本算法,核心器件为Xilinx Zynq UltraScale+的XCZU19EG,实现捕获模块资源消耗情况如表3 所示.
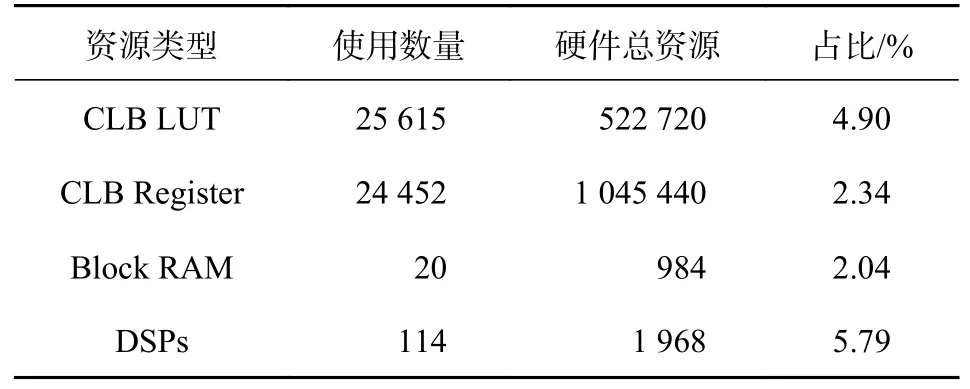
表3 捕获模块资源消耗
4.2 捕获性能分析
捕获性能评价的主要依据是捕获速度、捕获成功率、捕获多普勒误差.其中捕获速度测试量为发起捕获指令到上报捕获结束的时间;捕获成功率测试量为捕获结果转入跟踪的锁定成功率;捕获多普勒的测试结果为捕获估计信号多普勒与信号在真实多普勒的差值.下面以真实信号实测结果来分析本文实现的捕获算法性能.
测试时间为协调世界时(UTC)时间2021-05-01—05T08:00—20:00,选取BDS B1C、B1I、B2a、B2b、B3I,GPS L1CA、L5C,Galileo E1OS、E5a,GLONASS G1 等信号中卫星仰角高于30°的卫星进行测试,捕获模块工作时钟频率为124 MHz,分别测试其捕获速度、捕获成功率、捕获多普勒准确性.表4 给出了各信号的捕获参试配置.
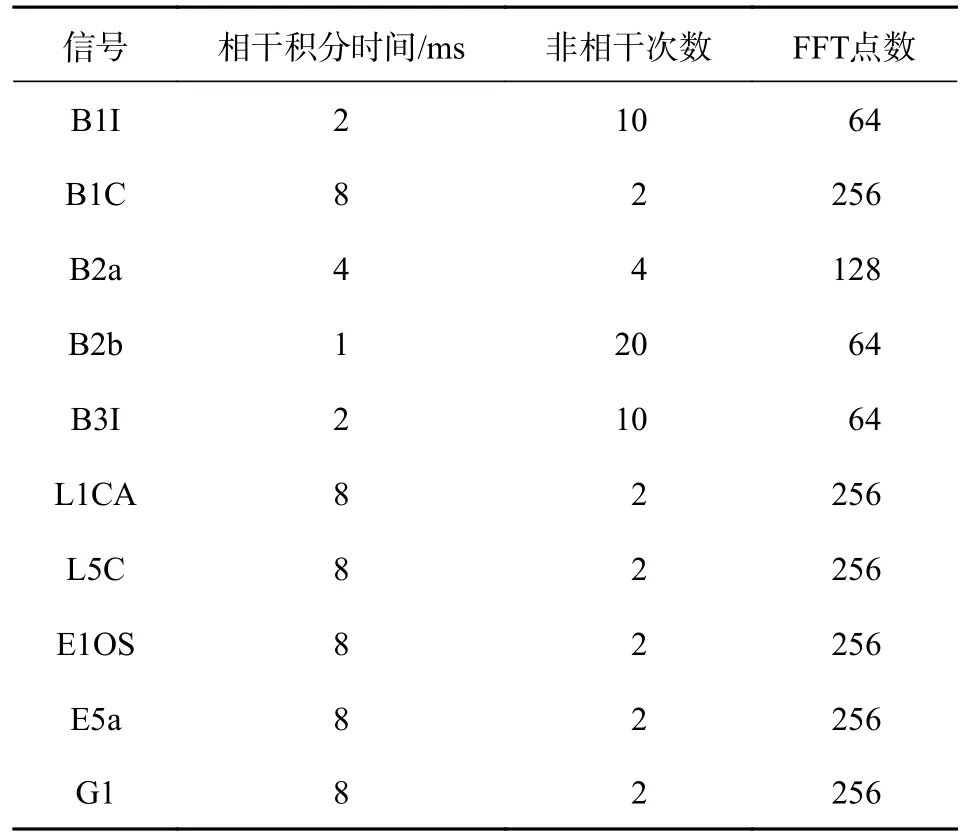
表4 捕获参数配置
表5 给出了各信号的捕性能统计结果,针对每个信号统计500 次捕获结果.

表5 捕获结果
从表5 可得,信号主码信号的码率Rc越高,其在单位相干积分时间内需要搜索的主码相位越多,因而其捕获搜索时间越长;同速率的信号单星最长捕获时间受总的积分时间Ttotal影响,Ttotal越长捕获耗时越长.
信号的主码速率Rc越高,其捕获成功率越低,因为搜索时刻在信号主码相位上均匀分布,Rc越高,需要搜索的码相位越多,导致搜索成功率越低.
信号捕获多普勒范围主要取决于捕获使用的相关积分时间.由式(11)可以得到FFT 计算结果的输出频率,则FFT 输出结果的频率间隔为

式中,M为实际采用的FFT 点数.
则信号捕获的多普勒误差范围为

捕获多普勒误差在 Δfd内均匀分布.实测多普勒误差最大未超过上述理论多普勒范围.
5 结束语
本文在基于PMF-FFT 算法的基础上研究了四系统多频点信号兼容捕获实现,提出了基于预平均处理的部分匹配滤波器改进方法,原来的N点长度的数据样点变为了2 组长度N/2 数据样点,在相同的积分时间条件下,使匹配滤波器阶数变为原来的一半,节省了一半的资源;中频数据量化为2 bit sig-mag 形式,中频数据缓存部分资源消耗减少50%;以最长捕获时间20~42 ms 的每颗星的速度完成对真实信号捕获,能够通过软件配置实现多种公开GNSS 信号的快速捕获;捕获结果多普勒误差约为31.25~125 Hz,捕获估计结果可以直接转入信号跟踪阶段,并且转跟踪成功率优于97.6%.本文研究的预平均变系数匹配滤波器捕获算法适用于兼容互操作型导航接收机,也适用于ASIC 芯片设计.