基于LSTM深度神经网络的智能网联汽车轨迹预测
2022-04-13熊逸展
熊 逸 展
(纽卡斯尔大学 工程学院,英国 纽卡斯尔 NE17RU)
1 相关工作
近年来,随着深度学习技术的进一步发展,在各研究领域都有了广泛的应用[1-2].在车辆工程和交通工程领域,借助深度神经网络的车辆控制和交通预测模型的研究也有了进一步深入发展[3-4].Wang和Xie等人[5-6]采用深度学习的方法研究了普通车辆的多种驾驶行为,结果表明深度神经网络比传统的浅层神经网络在捕获驾驶人的复杂非线性驾驶特性方面更具有优越性.Zhang等[7]从交通流中两种最基本的运动出发,提出以一种混合HRC训练方法来进一步优化LSTM模型,并利用NGSIM数据集,对所提HRC-LSTM模型进行训练和测试,结果表明所提方法在估计准确性方面有明显提高.Yang等人[8]将机器学习模型与基于运动学的跟车模型相结合,采用了一种最优组合预测方法来控制自动驾驶车辆的纵向运动,并采用实测车辆轨迹数据集对所提方法进行验证.Wang等人[9]的研究表明在基于深度学习的车辆行为拟合模型中,需要考虑到长记忆效应才能正确模拟交通中所观测到的时滞效应.Liu等人[10]提出了一个深度学习模型来模拟换道事件中的态势评估和决策过程,实测结果表明所提模型对车辆变道行为有较高的识别精度.
上述研究所采用的数据集大多为普通人工驾驶车辆的实测数据,较少关注智能网联汽车的行驶特性预测.当前,部分具有辅助驾驶和网联功能的商用智能网联汽车已逐渐普及,因此,本文采用LSTM深度神经网络来预测智能网联汽车的行驶状态,并通过实测数据对所提方法进行验证.
2 预测算法
LSTM主要应用于时间序列的预测问题.由于智能网联汽车的控制算法在嵌入式控制器中一般是固定的,所以外在的车辆行为相比普通的人工驾驶车辆会表现出较强的确定性.而且,智能网联汽车的运动具有明显的连续时间特性,因此采用LSTM深度神经网络预测运行状态会有较好的适用性.传统的BP神经网络因网络层数较浅,无法捕获到更为复杂的非线性关系,并且由于其不具有循环单元,对历史数据无明显记忆特性,但车辆的驾驶行为明显与历史运行状态相关,因此LSTM神经网络的结构较适应于车辆的状态预测问题.
本文所采用的预测算法可主要分为以下四个步骤.
步骤一:遗忘门设置
Fk=f[Wf·[hk-1,xk-1]+θf],
(1)
其中,f(·) 为神经网络的激活函数,hk-1为上一个单元输入,xk-1为当前输入,θf表示阈值.
步骤二:输入状态更新
(2)

(3)
步骤三:更新神经网络状态
(4)

步骤四:网络输出
(5)
经过步骤四中g(·) 的处理,将得到处于区间[-1,1]内的值,通过与Ok相乘,最终得到神经网络输出.
3 实验与分析
3.1 实验场景设置
本文所研究的车辆行为的测试类型有减速测试、振荡测试、高速测试和低速测试四种类型.数据类型包含时间戳、后车速度、前车速度和车辆间距.实测数据选择文献[11]中所公开的装配有自适应巡航控制的车辆行驶轨迹数据.减速测试的场景设置为前车速度突然变化,以此研究后车的响应情况.振荡测试旨在研究前车的速度波动对后方交通的影响.高速测试旨在研究高速前行车队中前后车之间的激励和响应关系.低速测试的目的是收集车辆在缓行期间的交通行为.将高速测试与低速测试分开进行的原因在于文献[12]通过实测实验发现交通流在高速和低速情况下随机振荡的影响程度是不同的.每种测试场景下,又可细分为两种实验,即车辆自适应巡航控制分别设定为远距离档位和近距离档位.
3.2 减速测试场景
图1(a)显示的是在车辆减速测试且自适应巡航控制选用远距离档位所收集到的加速度、速度和间距数值.图1(b)为目标车辆的加速度实测值与选用LSTM深度神经网络的预测值,可以看出预测值与测试值进一步拟合,可以达到工程所需的精度.图1(c)为选择近距离跟随档位时所采集到的数据,图1(d)为对应的预测值与实际值对比.结果显示,无论控制档位选择如何,本文所提方法都可以对目标车辆的加速度进行有效预测.
3.3 振荡测试场景
图2(a)和(c)为车辆振荡测试所收集的数据.图2(a)对应于远距离档位,图中显示车辆间距大于40 m.图2(b)对应于近距离档位,图中显示车辆间距小于40 m.图2(b)和(d)为在振荡测试场景下对目标车辆加速度的实测值和预测值,与图1(b)和(d)的预测效果相当,所以在测试场景改变时,本文所提方法依然有较好的预测效果.
3.4 高速测试场景
图3为车辆高速测试场景实验结果.在图3(a)中目标车辆由29 m/s平稳行驶一段时间,提速至31 m/s,平稳行驶50 s后又提速至33 m/s.随后又逐步降速.图3(b)为所对应目标车辆在远距离档位设置下的实际测量值和预测值.图3(c)和(d)为选择近距离跟随档位下的测试结果.整体而言,图3(b)和(d)所示的预测结果符合测试数据的演化趋势.

图1 减速测试结果
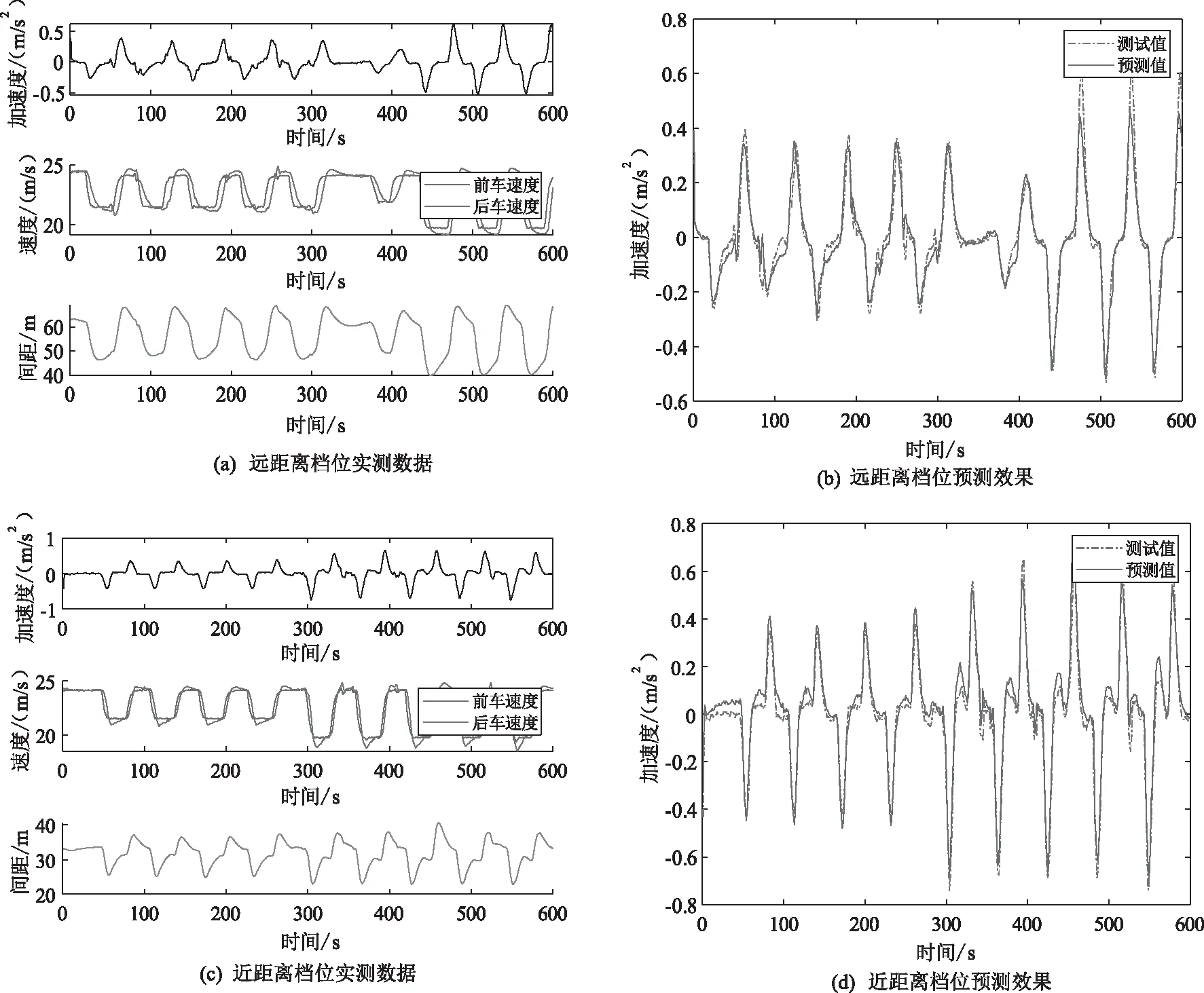
图2 振荡测试结果
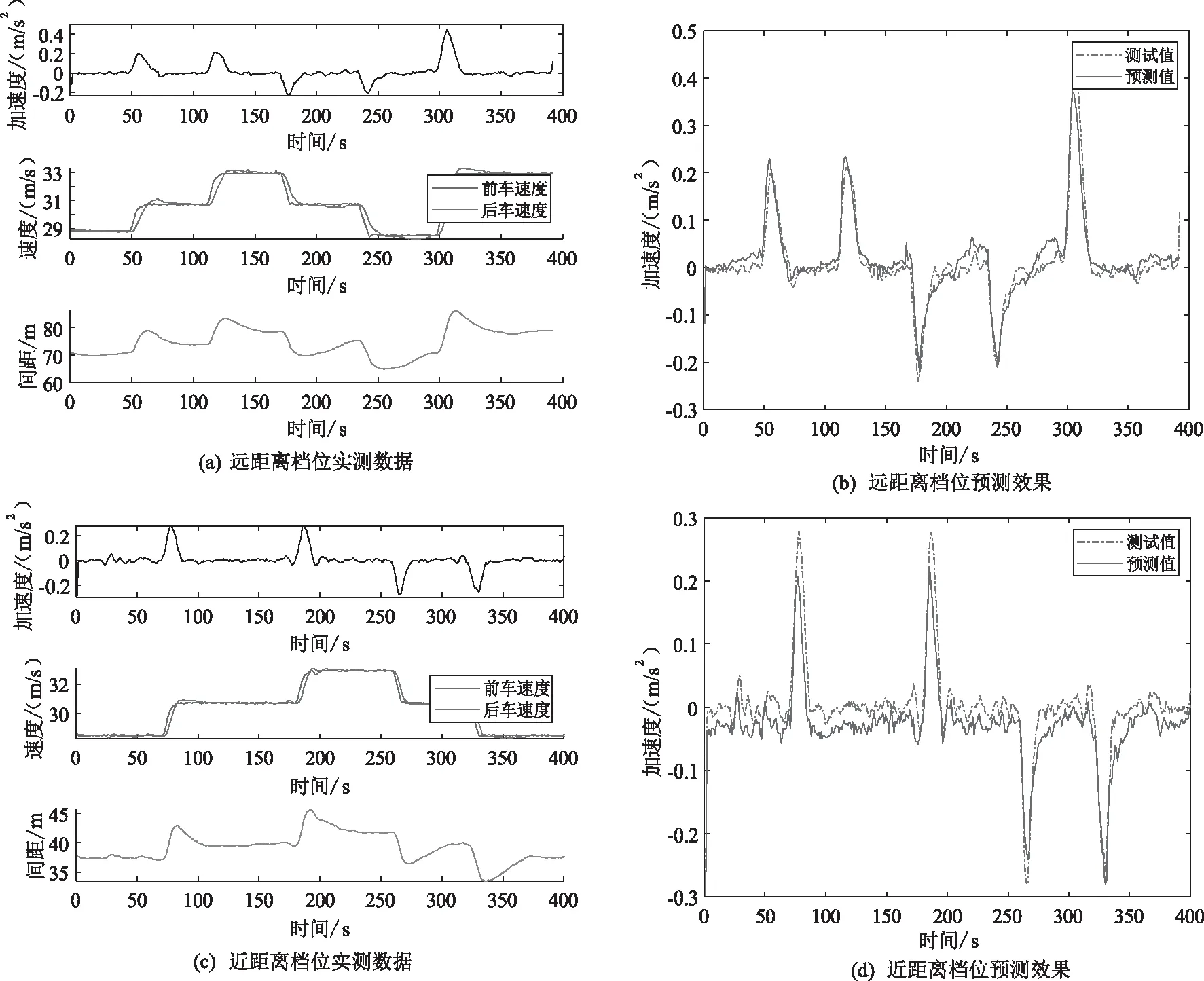
图3 高速测试结果
3.5 低速测试场景
图4为车辆低速测试场景实验结果.图4(a)和(b)为选择远距离档位时的实测数据以及预测值与测量值的比较结果.图4(c)和(d)则为选择近距离跟随档位时的实测数据以及预测值与测量值的比较结果.综合图1至图4的实验结果可以看出,基于LSTM深度神经网络的车辆行驶数据预测方法可以在车辆减速测试、振荡测试、高速测试和低速测试多种场景下达到工程预测需求,具有一定的鲁棒性和可靠性.
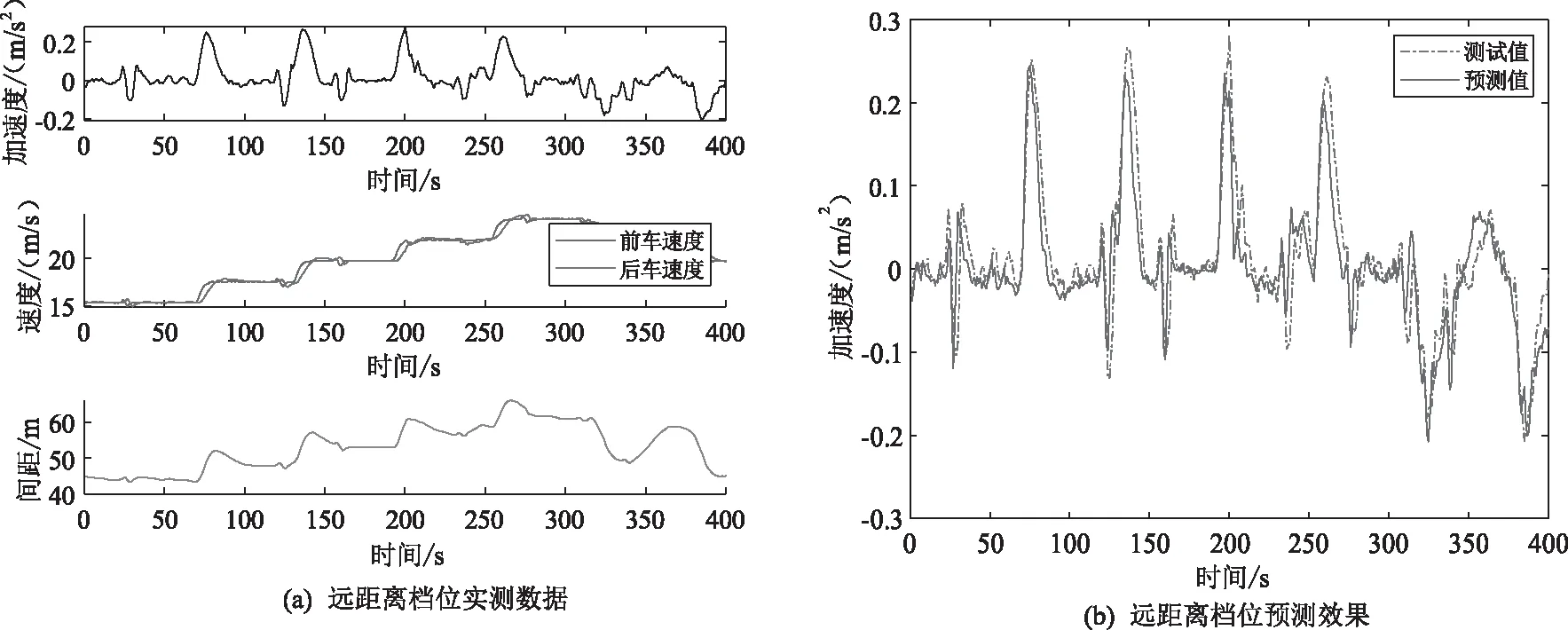

图4 低速测试结果
4 结束语
本文将LSTM深度神经网络应用于智能网联汽车的轨迹预测,分别选取了车辆减速测试、振荡测试、高速测试和低速测试四种实测场景,对本文所提方式进行验证,结果显示:本文所采用的轨迹预测方法可在多种复杂场景下满足工程预测的精度需求,具有一定的可靠性和鲁棒性,可应用于智能网联汽车的车辆控制、轨迹优化以及交通管控领域.因为智能网联汽车的广泛商用普及需要一定的时间,下一步将研究智能网联汽车在不同市场渗透率下的轨迹预测及优化问题.
