基于激光雷达的全生长周期甘蔗地行间自主导航研究*
2022-04-13李岩舟石奕峰涂伟覃锋潘柳颖何艳洲
李岩舟,石奕峰,涂伟,覃锋,潘柳颖,何艳洲
(1.广西大学机械工程学院,南宁市,530004;2.桂林师范高等专科学校,广西桂林,541199)
0 引言
甘蔗作为主要糖料作物,在中国南方地区被大量种植。但近年来,人力资源日益短缺,人力成本不断提高,智能化甘蔗作业装备需求逐渐扩大[1-2]。自主导航技术自20世纪20年代被提出,经过多年发展,形成了以机器视觉,GPS和激光雷达为代表的多种导航方式。机器视觉能够准确获取作物信息,但此方法受环境光照强度的影响较大[3-7]。GPS需要预先测定并生成电子地图,当作物种植区域或种植方式改变时,都需要重新测量建图,使用麻烦且价格昂贵[8-13]。激光雷达是一种价格合理且受环境制约较小,全天候的导航传感器[14-15]。Malavazi等[16]采用二维激光雷达和改进的PEARL算法消除叶片对作物定位的影响,提取作物垄间导航线。Barawid等[17]将激光雷达安装在拖拉机上,利用霍夫变换拟合路径。激光雷达作为导航传感器时多是实时提取数据,相对三维激光雷达,二维的数据量小,且价格实惠,更为适用[18-21]。在实际的丘陵地带甘蔗田地中,甘蔗作业机械起伏摇摆较大,雷达的横向数据可能会产生较大偏差。且甘蔗叶片纵横交错,也会产生较大的定位误差。此外,不同生长阶段的甘蔗具有不同的形态特点,针对某一阶段甘蔗的定位扬用的算法可能无法应用在其他阶段。为解决这些问题,本文设计一种预矫正算法消除地形对横向数据的影响,通过比较点云数目阈值调整聚类参数以适应不同生长周期,采用滤波和置信区间消除作物叶片干扰。最后,改进最小二乘法拟合路径,实现甘蔗全生长周期的行走路径的拟合。
1 研究方法
1.1 地形干扰矫正
地形起伏导致的雷达侧倾可能会对点云数据横坐标距离值产生影响,如图1扬示。
当雷达发生倾斜时,可能会导致扫描宽度大于实际宽度的现象。可加入陀螺仪或倾角传感器,通过测量雷达的倾斜角度,依据式(1)扬示,预先对激光雷达的距离值进行修订,提高检测的准确性和后续机器人控制的稳定性。
式中:θ——雷达侧倾角度;
xj——修订后点云数据横坐标。
1.2 数据预处理与生长周期判定
根据甘蔗实际种植情况和雷达扫描特点,删除点云数据中纵向距离值大于3 m或小于0 m,左右横向距离值绝对值大于1 m的部分。得到幼苗期,分蘖期,生长期和成熟期预处理后的点云图如图2扬示。可看出,幼苗时期的甘蔗点云数目远远小于其余时期。每个时期各选取5组预处理之后的雷达点云数目进行对比,结果如图3扬示。
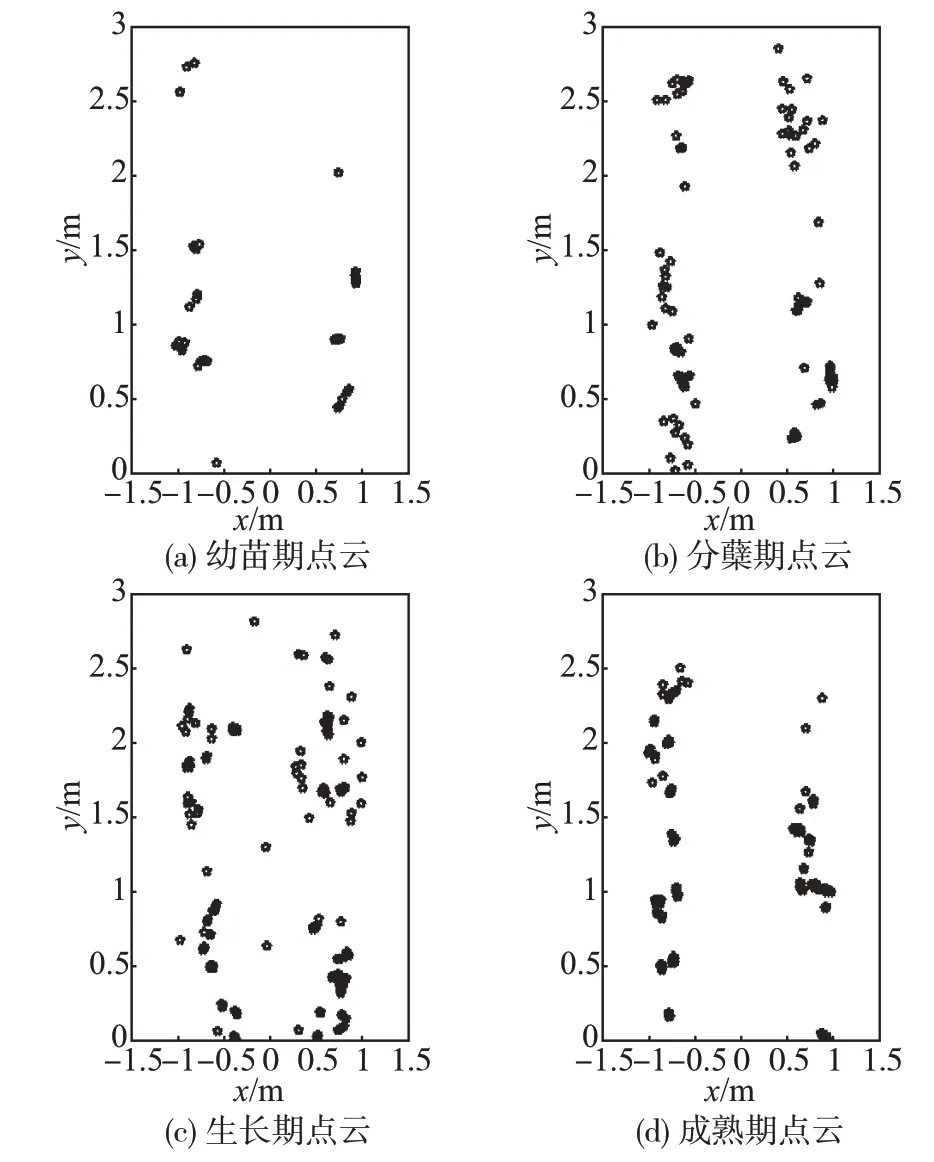
图2 预处理后点云数据Fig.2 Point cloud data after preprocessing
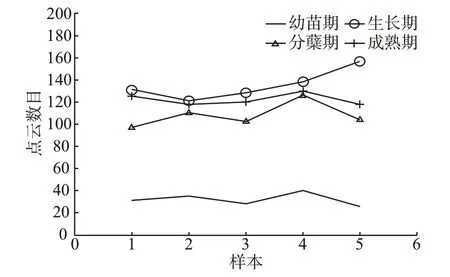
图3 点云数目统计图Fig.3 Statistics of the number of point clouds
可以看出,幼苗时期的点云数量基本不超过40,而其余生长时期的点云数据基本都在90以上。基于此,设定预处理后点云数目阈值为70,当点云数目小于设定阈值时,则判定为幼苗时期。
1.3 基于点云数目阈值的自适应聚类算法
DBSCAN算法是一种基于密度的聚类算法。该算法可以有效的搜寻到被低密度区域分割开的高密度区域。聚类效果取决于聚类半径和半径内点云数目阈值的选取。幼苗时期与其余时期形态相比作物体积较小,相同的聚类半径下,可能达不到其余时期扬设定的点云数目阈值。若不改变聚类参数,可能会造成漏检。
当检测到N小于60时,判定为幼苗时期,此时作物叶片较少且紧贴主干,可将叶片与主干合为一个聚类团进行定位。通过调研桂糖42号品种甘蔗,幼苗期种植间距为25 cm左右。设置算法聚类半径为0.15,聚类簇基础点云数目阈值为2。
生长期和成熟期甘蔗茎节直径基本为5~8 cm,种植间距与幼苗期一致。分蘖期甘蔗根部叶片集中明显,可近似将根部包裹的部分当作茎节处理,与生长期和成熟期采用相同的算法。当点云落点N大于60时,判定甘蔗处在其余生长时期,改变聚类半径为0.1,聚类簇中的基础点云数目阈值为3。经过聚类处理之后,针对幼苗时期可以对幼苗扬在位置进行初步定位。针对其余生长时期可以有效的排除远端小片叶片和一些孤立噪点的干扰,聚类后的点云图如图4扬示。
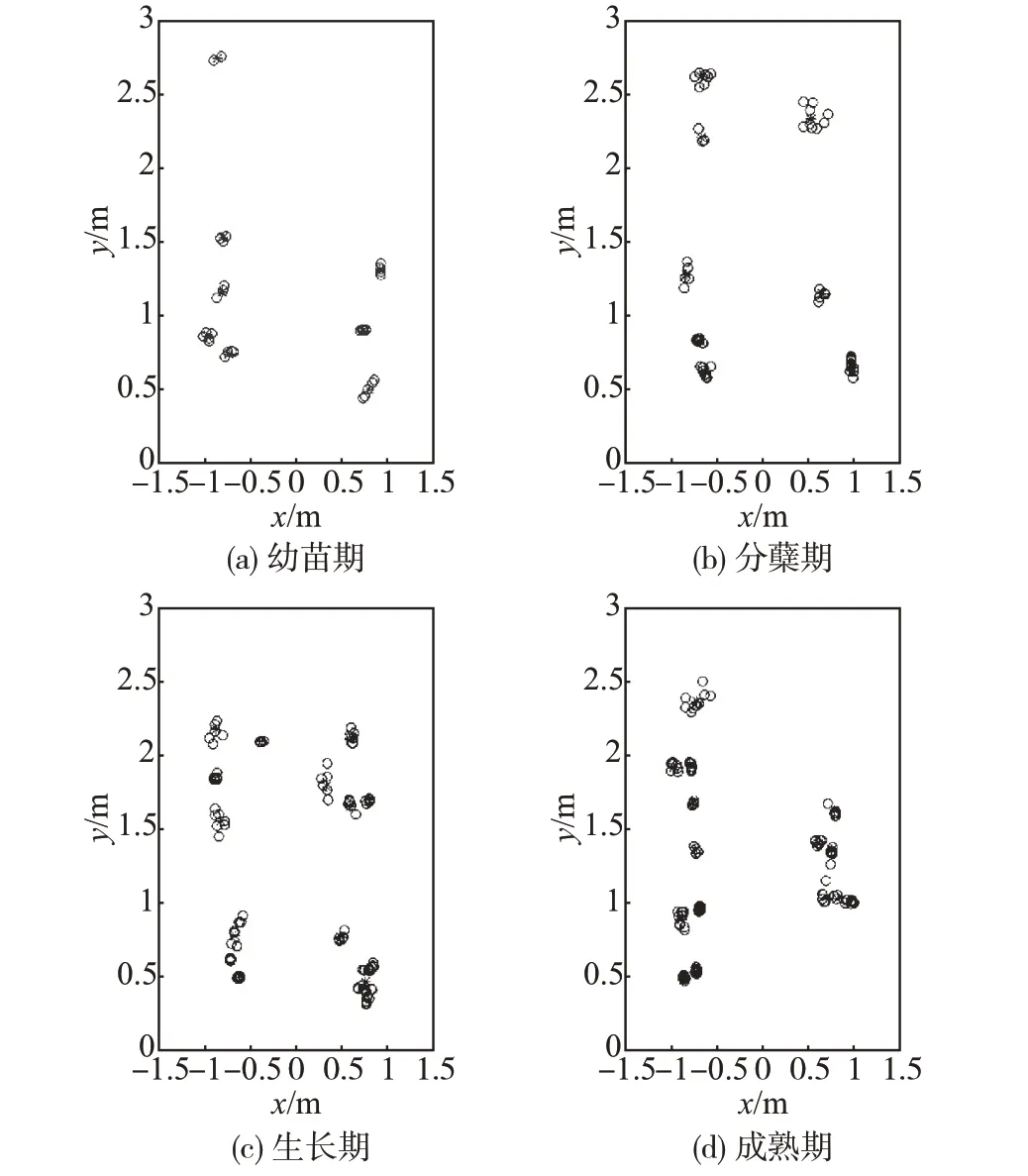
图4 密度聚类后点云图Fig.4 Point cloud after density clustering
1.4 茎节近端干扰的排除
贴合作物部分的叶片和环境噪点无法用聚类算法消除。可采用滤波算法进行处理。均值滤波具有处理速度快,不依赖于初始值的选择的特点。考虑到幼苗时期的甘蔗聚类簇中的数据过少,滤波的意义不大。除幼苗以外的其余阶段采用均值滤波,将滤波后每一个聚类团的坐标数据求均值,作为甘蔗的实际坐标点。幼苗时期直接求取均值作为实际坐标点。经过处理后的各阶段点云图如图5扬示。
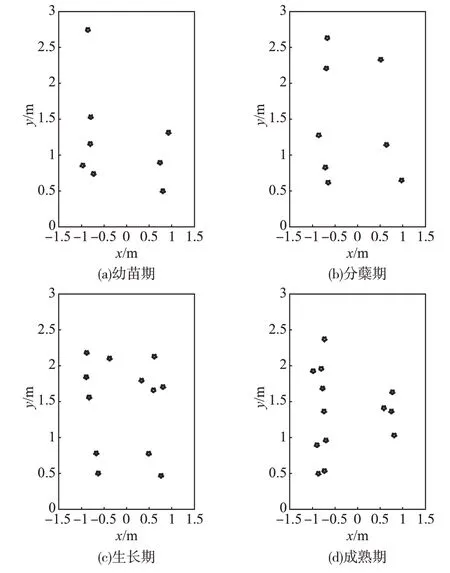
图5 滤波后甘蔗坐标Fig.5 Sugarcane coordinates after filtering
1.5 聚类误差分析
距离作物茎节较远位置的大片叶片,面积较大,应用聚类算法时可能会被误判为甘蔗而无法消除,如图6扬示。作物多采用成排种植,具有一定规律,因此,可采用置信区间的办法[22],来排除此类干扰点的影响。
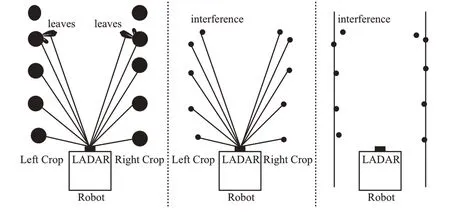
图6 叶片误差示意图Fig.6 Schematic diagram of blade error
将左右两侧实际坐标点分别进行直线拟合,由于坐标点过少易产生误差,可采用检测斜率遍历数据删减的方法提高拟合的准确率,算法流程图如图7扬示。
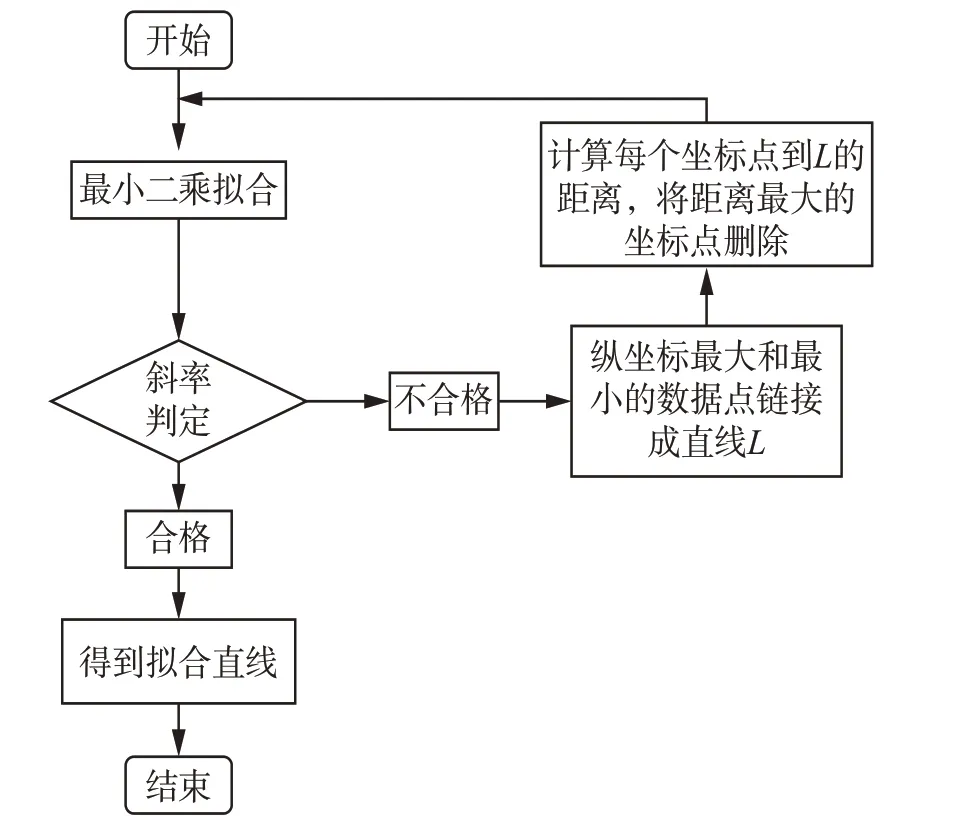
图7 斜率检测算法流程图Fig.7 Flow chart of slope detection algorithm
1)初步拟合直线之后,对直线进行斜率判定,若直线的斜率a大于-tan 75°的和小于tan 75°直线判定为不合格。
2)将纵坐标最小和最大的点连接构成直线,计算每个坐标点到此直线的距离,并按由大到小的顺序依次删除坐标点,每删除一次,返回进行一次最小二乘拟合。
3)对新拟合直线进行斜率判定,重复步骤(1)(2),直到拟合出符合目标条件的直线y=ax+b为止。
拟合出直线后,计算出其中一侧数据到该侧数据拟合直线y=ax+b的距离值Li作为样本,且该样本符合L~N(μ,σ2),则样本均值

样本方差
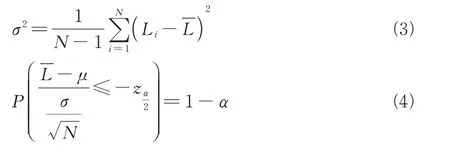
可得样本置信区间

根据置信上下限对坐标数据进行划分,处在区间之外的视为离群点。如图8扬示,线外的即为离群点,将其去除。各阶段大片叶片干扰排除后拟合结果如图9扬示。
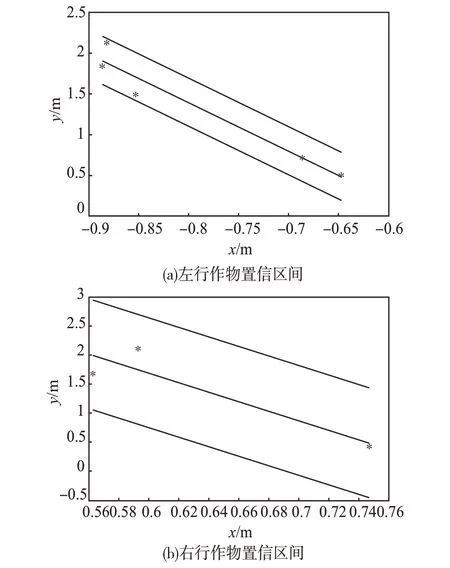
图8 基于正态分布的置信区间Fig.8 Confidence interval based on normal distribution
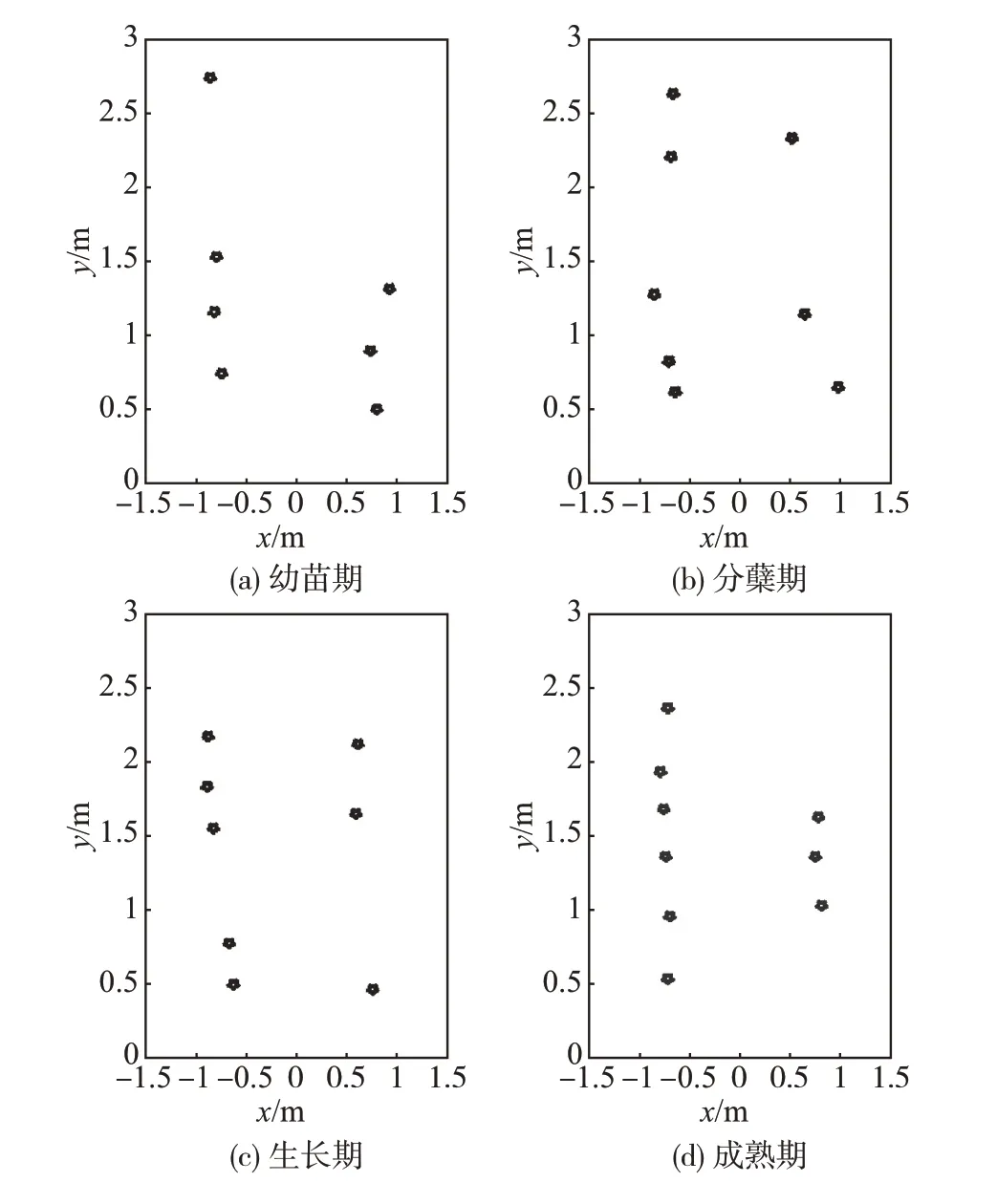
图9 处理后甘蔗坐标数据Fig.9 Sugarcane coordinate data after processing
1.6 导航路径拟合
定位作物坐标位置后,将左右两侧坐标点一一对应,当某侧植株数小于另一侧时,对应缺失的部分采用同侧前一次的数据点代替,两两组合求取坐标均值,得到待拟合的坐标点,再利用前述斜率判定的方法进行直线拟合,最终的拟合结果如图10扬示,根据拟合结果可看出,拟合路径基本处在作物可通行区域的正中位置,且左右两侧皆具有一定的空间富余,各阶段的拟合效果都较为理想。

图10 直线拟合路径Fig.10 Straight line fitting path
2 试验与讨论
利用皮尺测量实际甘蔗的坐标,将经过聚类和置信区间分析之后得到的甘蔗拟合坐标点和实际田地中的甘蔗坐标相比较,分别针对桂糖42号品种的四个不同生长时期的甘蔗进行坐标位置的对比如图11扬示。其中,幼苗阶段作物高度约为35 cm,分蘖期高度约为55 cm。生长期甘蔗高度约为1.2 m,此时期的甘蔗叶片较多。成熟期甘蔗高度约为2.8 m。经过比对后得到甘蔗的横向偏差数据如表1扬示。试验结果表明,幼苗期,分蘖期,生长期和成熟期横向平均误差分别为2.22 cm,3.4 cm,3.8 cm和2.24 cm。为更好的表现距离对作物定位的影响,选取各阶段左侧甘蔗拟合坐标与实际坐标的横向偏差比较如图12扬示。
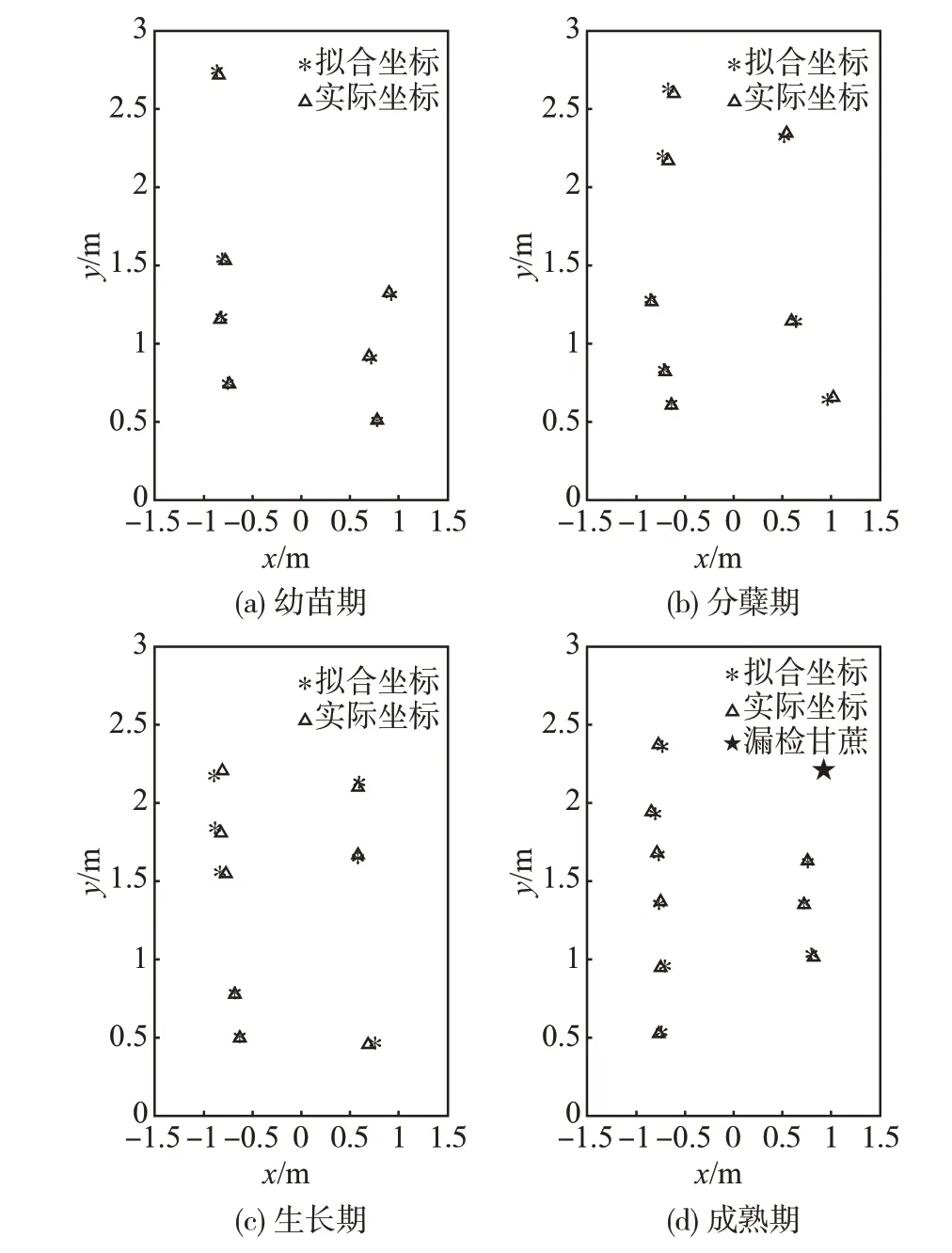
图11 各时期分布结果对比Fig.11 Comparison of distribution results in various periods
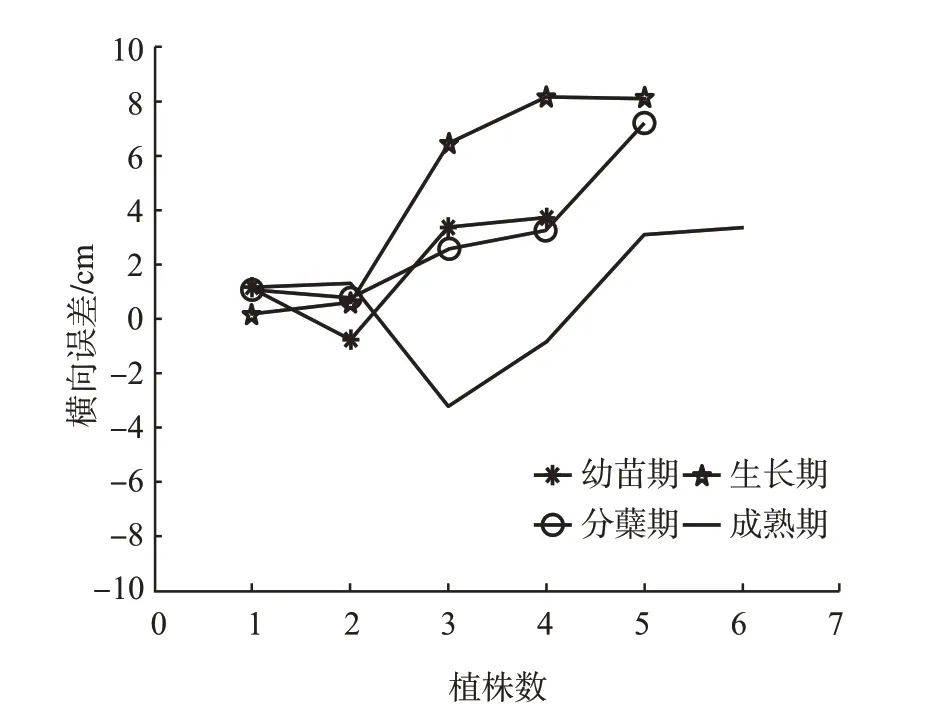
图12 左行甘蔗各阶段横向偏差对比Fig.12 Comparison of horizontal deviation of sugarcane in each stage on the left row
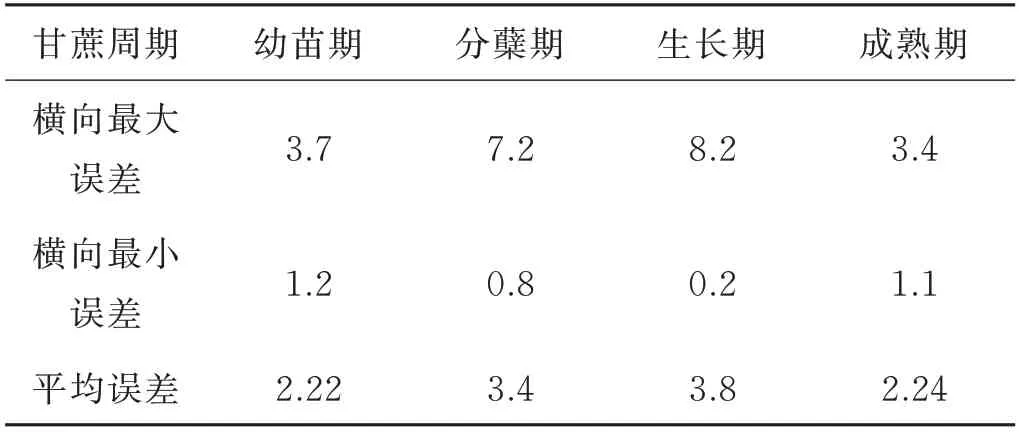
表1 各时期甘蔗定位误差Tab.1 Sugarcane positioning error in each period cm
可以看出,甘蔗在近端时,误差相对较小,随着扫描距离的增大,误差有增大的趋势。生长期的甘蔗大小叶片较多,干扰较大,相对其余三个时期的误差较大。四个生长周期的拟合结果,误差都在可接受范围内。其中成熟期的甘蔗存在一漏检植株,但不影响实际导航路径的拟合。
分析误差来源主要是离甘蔗茎节较近位置处有叶片的存在,可能导致均值滤波后的结果有扬偏移。其次,大气散射和雷达旋转电机的震动也可能会对点云数据产生一定的影响。
3 结论
1)通过激光雷达采集实际甘蔗田地中的点云数据,测量雷达倾斜角度对甘蔗横向距离预矫正。并设置点云数目阈值判断扬处生长周期并自适应选取聚类参数,使用基于密度的改进DBSCAN聚类算法和均值滤波处理点云数据。
根据甘蔗种植规律和斜率特征,改进最小二乘法拟合直线,并针对甘蔗坐标点到拟合直线的距离,引入95%置信区间,排除远端大片叶片的影响,得到各阶段甘蔗的实际坐标,并拟合出导航线,实现了甘蔗全生长阶段的导航路径规划。
2)将拟合出的甘蔗坐标点与实际坐标点比较,幼苗期甘蔗横向平均误差为2.22 cm。分蘖期甘蔗横向平均误差为3.4 cm。生长期的甘蔗横向平均误差为3.8 cm。成熟期的甘蔗横向平均误差2.24 cm。误差来源为茎节较近部分叶子和雷达本身测量误差。
3)本次试验基本能做到对各阶段甘蔗的定位,拟合出合适的导航路径,为今后的甘蔗全阶段通用作业底盘的自主导航打下基础。
