农业机械自动转向装置集成系统设计及试验**
2022-04-13张刚陈志桢程尚坤温兴马强龙杨洋马标
张刚,陈志桢,程尚坤,温兴,马强龙,杨洋,2,马标
(1.安徽农业大学工学院,合肥市,230036;2.合肥综合性国家科学中心人工智能研究院(安徽省人工智能实验室),合肥市,230036;3.农业农村部南京农业机械化研究扬,南京市,210014)
0 引言
随着智能农业化的发展,自动驾驶农机和农业机器人越来越多的应用到农业上[1],作为自动驾驶的核心部件,一款控制精度高、响应迅速、成本低、可靠性高且集成度高的自动转向系统是当下研究的重点[2]。电控转向系统的设计主要有电控转向液压阀[3-5]及电控转向电机[6-8]两种方案。电控转向液压阀的方式一般在整车转向系统上并联一个转向电控液压阀来达到控制转向的目的,该方式控制精度较高且响应迅速,但控制器价格昂贵,且结构复杂,对整车改装大,不便于商业化大规模生产。Liu等[9]设计了一款三位五通换向阀和两个单向阀组成的前轮液压转向控制机构,该方式在正弦波信号下平均误差为0.27°,且响应存在振荡现象,不够平稳;罗锡文等[10]设计的电控比例液压阀作为转向执行机构,该方式响应迅速,控制精度较高,但采用的液压阀价格昂贵,不易安装操作,且响应存在稳态误差的问题;赵建东等[11]在基于东方红SG-250拖拉机电控液压转向系统研究中并联了一个比例方向阀,但也存在需要对油路进行改造,加装过程复杂且需要考虑漏油的问题。电控转向电机的方式一般在方向盘或者转向柱上安装一个直流电机,该方式的优点是对车辆改动小,体较小,但是控制扭矩较小,需要改装现有的方向盘,且对安装精度要求较高。Yin等[12]在水稻插秧机的转向柱上加装一款伺服电机用于控制转向,该方式的优点是对车辆改动小,通过齿轮直接与方向盘连接,控制可靠,但直线行驶误差较大;张闻宇等[13]在拖拉机自动导航摩擦轮式转向驱动系统设计与试验中在拖拉机的方向盘上加装了步进电机来控制转向,响应精度高,但存在着对安装的精度要求高,且可能会存在滑移现象。
针对以上情况,设计一款结构简单,适用性强,控制精度高且安装便捷的农机自动转向集成装置及其电控系统是必要的。本文设计了一款车规级的采用双闭PID控制算法的自动转向控制器,并进行仿真试验与田间实车试验,使目标车轮的角度与角速度精确得到可靠的控制,具有体积小巧、结构简单、转向控制力矩大、控制精度高等优点,可方便的加装在各类自动驾驶的农机和机器人。
1 自动转向集成装置结构及工作原理
1.1 结构设计
考虑农业机械的转向控制主要是控制全液压转向器的左右开合达到控制车轮转向油缸伸缩的目的,根据这一特点及农机转向机械控制原理,设计自动转向集成装置[14-15],如图1扬示。
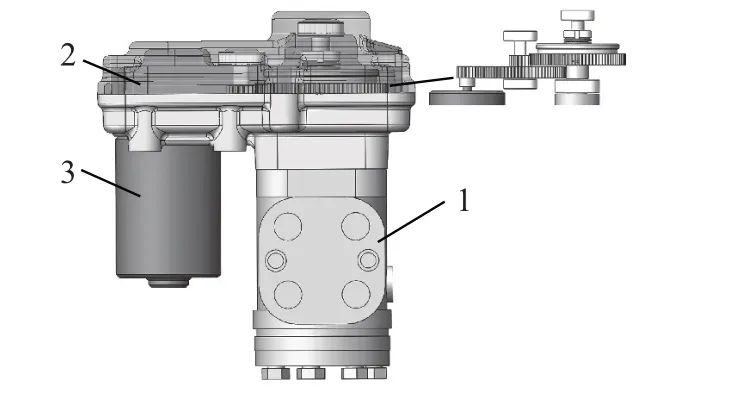
图1 自动转向集成装置整体结构设计Fig.1 Overall structural design of the automatic steering integration device
该装置主要由直流有刷电机,齿轮减速器及全液压转向器三部分组成,并根据人工驾驶时最快打方向盘的速度和力矩选型电机和设计减速器,需满足

式中:wc——电机角速度,rad/s;
wm——人工驾驶下最大转向角速度,根据多次不同驾驶员打方向盘的平均数取值为4.18 rad/s;
n——减速器减速比;
Nc——电机需输出力矩,N·m;
Nm——驱动全液压转向器转向的输入力矩值,一般小于5 N·m。
车载电源为12 V的直流蓄电池,根据以上的参数选择自动转向集成装置系统的电机为直流有刷电机,型号为ZY6812,其技术参数如表1扬示。
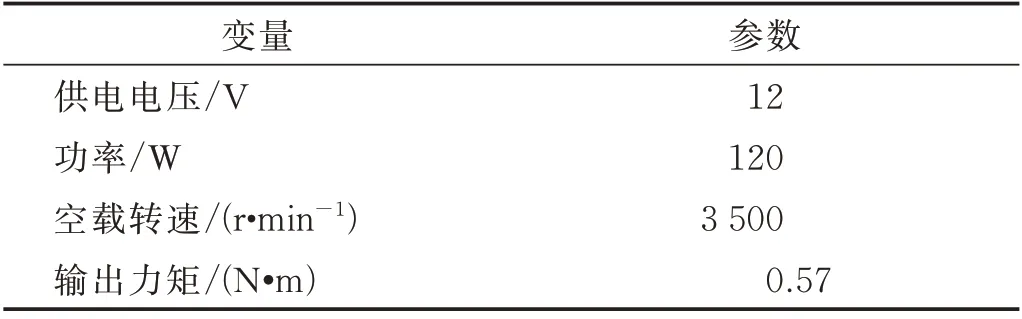
表1 驱动电机参数Tab.1 Drive motor parameters
该电机具有体积小巧,成本低廉,控制方式简单,输出力矩较大,适用于自动转向集成装置系统大规模的产品化加工。减速器设计减速倍数为1∶25,具备集成度高、制造成本低、体积小、便于携带及快速等特点。自动转向集成装置各部分之间通过机械齿轮直接连接,且加装外壳密封,可靠性高。自动转向集成装置的主要技术参数如表2扬示。

表2 自动转向集成装置主要技术参数Tab.2 Main technical parameters of automatic steering integration device
1.2 工作原理
直流有刷电机为自动转向集成装置提供动力,通过减速器减速后输出给全液压转向器,减速器采用二级减速,每级之间的减速比均为1∶5,将前级电机的转速缩小了25倍后再输出给后级的全液压转向器,使得电机提供更大的力矩且提高了全液压转向器的可控性。
自动转向集成控制机构在农业机械上的控制原理如图2扬示,液压泵将液压油供给转向液压回路,此时通过控制全液压转向器的正反开通大小及开通速度来控制输出的流量,再输出给双向液压油缸控制车轮转向。

图2 自动转向集成控制机构控制农机转向原理图Fig.2 Automatic steering integration device to control the steering of agricultural machinery schematic
控制器通过接收上位机的目标车轮位置指令控制直流电机的转动实现车轮转向角度控制。自动转向集成系统的整体控制流程图如图3。

图3 自动转向系统整体控制流程图Fig.3 Control flow chart of auto-steering system
2 自动转向集成装置控制器设计
2.1 电控系统整体设计
自动转向集成装置电控系统整体设计架构如图4扬示,由核心处理器及其外围电路模块组成,核心处理器为飞思卡尔MC9S12系列单片机。
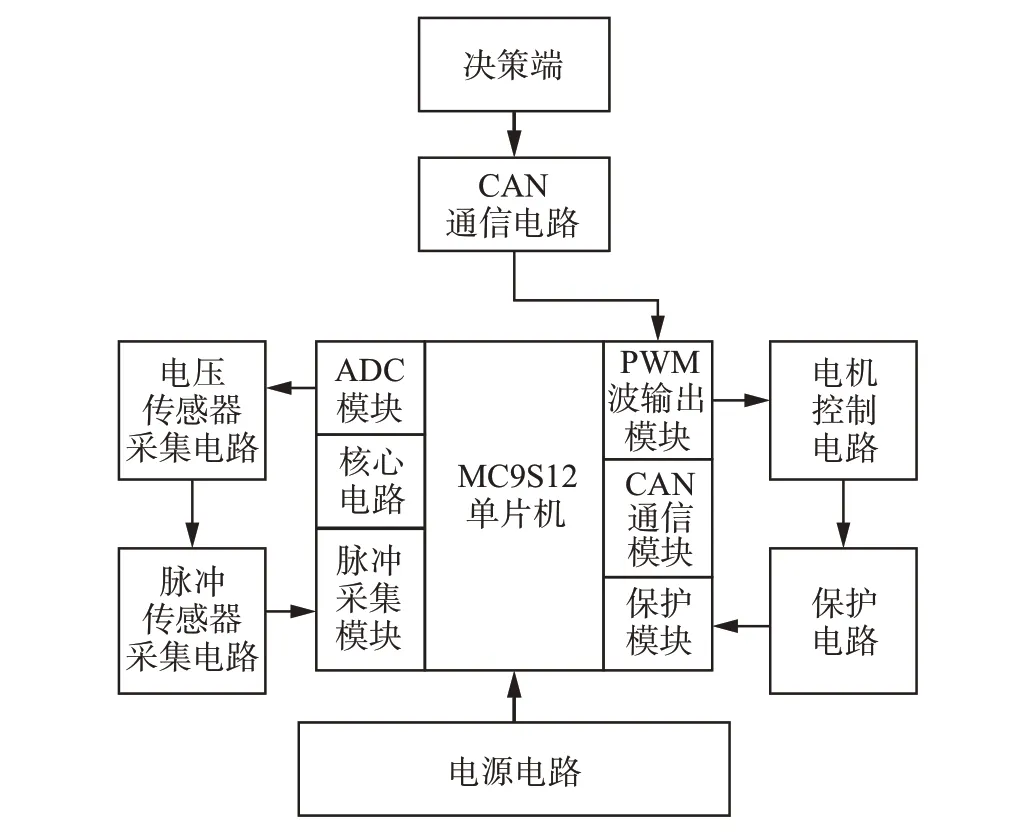
图4 自动转向集成装置电控系统整体设计架构Fig.4 Design architecture of the electronic control system of the steering integration unit
外部电路根据设计的农机自动转向功能主要包含最小系统电路、电源电路、模拟量传感器采集电路、数字量传感器采集电路、电机控制电路、CAN通信电路及相关的保护电路组成。
其中,MC9S12处理器主要对数据进行处理及运算,并通过相关的内置外设进行通信及电机控制。最小系统电路为单片机提供正常工作的基本条件。电源电路为整个电控系统提供不同电压的电源,保证系统的稳定工作。
模拟量传感器采集电路主要用于采集车轮转向传感器的电压信号;数字量传感器采集电路采集车轮转向速度传感器的脉冲信号;电机控制电路根据单片机发出的PWM波信号来达到控制电机转动的目的;CAN通信电路进行上下位机的数据交互;保护电路对电路板过流、过热等情况进行保护,使控制系统更加可靠。
2.2 控制器电源电路设计
防误操作控制器电源电路如图5扬示。针对发动机未启动工况下自动转向系统误操作导致的转向电机堵转烧毁,设计了发动机点火开关启动控制器电路及关机自动断电电路,如图5(a)。
常见农机发动机未点火发动时,液压系统未开始工作,此时方向盘很难转动,此时若给自动转向集成装置控制器上电,使电机驱动全液压转向器工作将导致电机堵转损坏电机,或者损害控制器。
因此,控制器电源电路设计考虑此类误操作情况,设计了点火开关信号触发的控制器电源开启电路,当农机熄火时,点火开关无信号,此时PIN_IGNITION_SW端为低电 平,Q6不 导通,Q4导通,Q2不导 通,Q1不导通,此时12 V电压输入不到后端给单片机供电,电机驱动电路不工作;当此时有点火信号输入时,PIN_IGNITION_SW端 为 高 电 平,Q6导 通,Q4不 导通,Q2导通,Q1导通,此时12 V电压输入到后端给单片机供电,转向电机开始工作。且还设计了控制器关机控制电路,当给自动转向电控系统下发一个关机指令时,单片机输出一个低电平到Q5的IGNITON_LOCK端,导致Q5截止,此时Q1截止,整个系统断电,自动转向集成装置系统不工作。
此电路保证了只有在发动机启动后自动转向集成装置系统才能工作,提高了系统的可靠性,整体控制逻辑如图5(b)扬示。

图5 防误操作控制器电源电路Fig.5 Anti-misoperation controller power circuit
12 V电源经电容滤波之后输入到12 V转5 V降压电路进行降压,如图6扬示,该降压芯片采用的是L4995高精度降压芯片,集成了看门狗、使能和外部可编程复位电路。

图6 12 V转5 V降压电路Fig.6 12 V to 5 V step-down circuit
2.3 模拟量传感器采集电路设计
由于车轮转向是围绕中心进行旋转式转向,且控制器为5 V传感器输出供电,根据以上特性采用旋转式角度传感器,型号为P3022-V1-CW360,量程0~360°,线性精度0.3%,防护等级为IP67。由于该旋转式角度传感器为0~5 V电压型输出传感器,扬以基于此设计了模拟量传感器采集电路,如图7扬示。

图7 模拟量采集电路Fig.7 Analog acquisition circuit design
传感器电压信号进过滤波后输入到2904运放设计的电压跟随器进行前后级阻抗匹配,输出端经滤波后输入单片机的ADC电压采集引脚,R29为运放的平衡电阻,D5为双向钳位二极管,保证输入单片机的电压在0~5 V。
2.4 电机控制系统设计
系统(图8)采用A3941芯片构成的电机全桥驱动电路,功率器件采用4个AP9990GH的N沟道场效应管,耐压60 V,可过100 A电流。通过单片机输出PWM和高低电平对PWMH、PWML、SR及PHASE端的控制,实现H桥的上下桥臂交替导通,来完成对电机位置及速度的控制,达到对拖拉机前轮的位置控制。

图8 电机驱动及过流保护电路Fig.8 Motor drive and protection circuit
为防止电机在低速工作和堵转时造成电流过大而烧坏电机,设计了电流检测电路来实时监测当前电机电流,在全桥电路的下桥臂串联一个0.05 R的采样电阻,采用INA197分流检测器来对采样电阻进行电流采样并通过MTR_CUR端将采样值反馈到单片机,当检测到电流超出阈值时,则退出自动驾驶模式,能够防止因电流过大而烧坏驱动电路和电机。
2.5 CAN通信电路设计
根据转向控制系统多节点的要求以及国际上对农机总线的通用性,选用CAN总线通信方式作为自动转向集成装置系统的控制网络,以实现控制单元和各个子系统之间的信息交互。电路图如图9扬示,采用CAN2.0的TJA1050芯片作为主体芯片,加入了共模抑制电感及TVS防瞬态双向抑制二极管使得通信电路更加可靠。
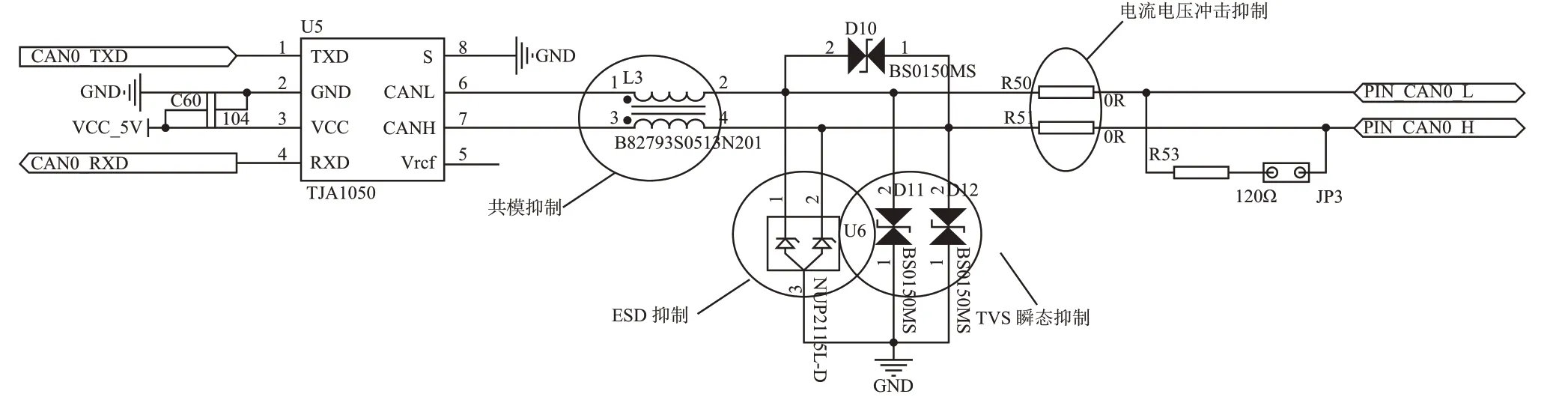
图9 CAN通信电路设计Fig.9 CAN communication circuit design
2.6 自动转向集成装置电机控制算法
2.6.1 液压转向系统模型建立
设计的自动转向集成装置是由全液压转向器和转向液压缸构成,全液压转向器控制油路的方向和流量,转向液压缸驱动转向轮转向,以该全液压转向器和转向液压缸为研究对象,继而建立该转向系统的数学模型[16-17],该模型包括全液压转向器、转向液压缸和转向轮。
实际的转向过程中,综合考虑全液压转向器存在延时、转向轮与地面的摩擦力及外部负载等因素,阀控缸位置系统中系统输入与转向角速度的传递函数可使用一个二阶惯性环节和一个延时环节表示
系统输入I(s)与转向角度θ(s)的传递函数

式中:Gθ(s)——传递函数的比值;
θ(s)——向轴输出角度,rad/s;
I(s)——控制器输入电流,A;
s——拉式变换的复数;
Ƭ——时间函数延迟系数;
Kp、Kp1、Kp2——传递函数参数。
经测试可得,分别为控制全液压转向器输入电流信号和转向角度的输出信号,通过使用Matlab的系统辨识工具箱对当前转向系统进行辨识,得:Kp=1.1484;Kp1=0.98185;Kp2=0.97903;Ƭ=1.442。
2.6.2 转向轮双闭环控制算法设计
为增加车轮的可控性,车轮以给定的角速度转向,设计了基于车轮转向角速度控制的自动转向双闭环转向控制算法。外环为车轮角速度控制,内环为车轮角度控制,使得辅助转向轮能够平稳及可控的速度达到目标位置。双闭环皆采用PID控制算法,算法方程

式中:OPID——输出值;
Kp、Ki、Kd——位置控制算法系数;
e(k)——本次角度偏差;
e(k-1)——上一次的角度偏差;
∑e(k-1)——e(k)以及之前的偏差累积和,其中k为1,2,…,k。
根据式(3)~式(5),利用Simulink建立如图10所示的双闭环电控液压阀控制液压缸的系统试验仿真模型。

图10 电控液压阀控制液压马达系统仿真模型Fig.10 Simulation model of hydraulic motor system controlled by electronically controlled hydraulic valve
外环为角速度控制,内环为角度控制,MATLAB Fcn模块中为角速度控制算法程序,仿真中设置输入的目标转向角度信号分别为20°阶跃信号和正弦波信号,PID控制器的参数分别设为Kp=30,Ki=5,Kd=12。试验系统的响应仿真曲线如图11所示。
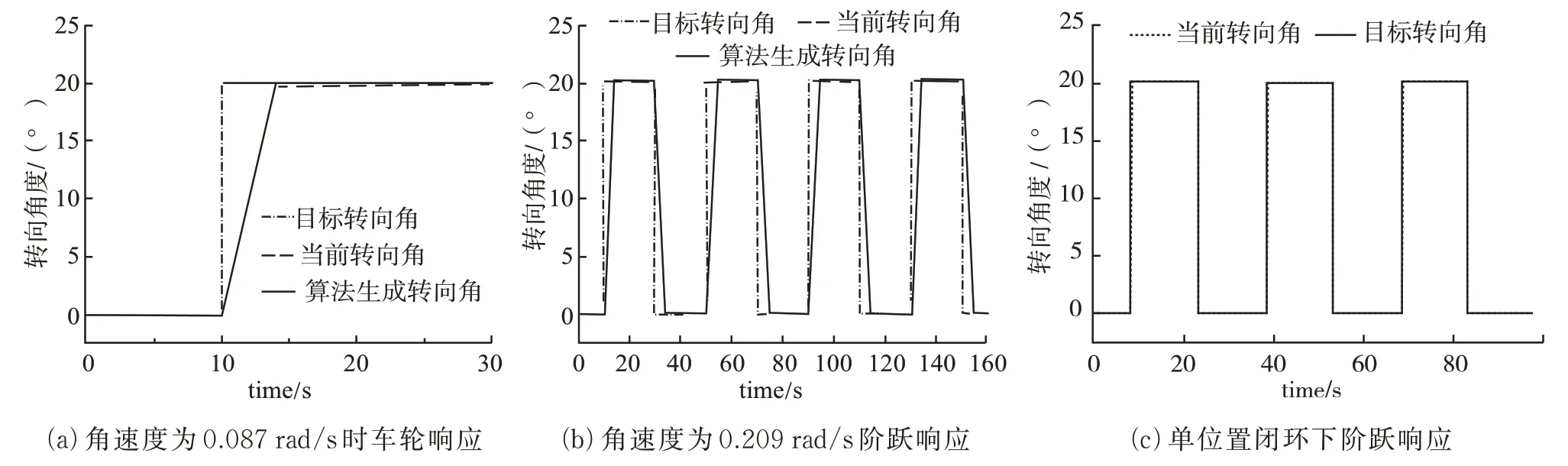
图11 试验系统阶跃响应仿真曲线图Fig.11 Simulation curve of the step response of the experimental system
由图11(a)可看出,在设定好的角速度工况下,当前车轮转角能很好的跟随目标角度并达到稳态;图11(b)可看出,在有角速闭环控制下,当前车轮转向角均较准确的跟踪上了输入的目标转角,且稳态误差均小于0.2°,跟踪效果达到要求,图11(c)可看出,在没有角速度闭环控制下,当前车轮的响应超调量较大,且到达稳态的时间也长于加了角速度闭环的。试验表明本文设计的液压控制算法控制效果理想。
2.7 控制器实物
自动转向集成装置控制器实物图如图12扬示,使用车规级芯片,模块化的集成了各种外围电路,整个控制器分上下两层,下层电机功率控制电路,上层逻辑控制部分,将逻辑控制与功率控制分开,使得电机控制部分能够到达大功率控制,加大整体散热,很好地保护了上层逻辑处理的部分。

图12 自动转向集成装置控制器电路实物图Fig.12 Physical diagram of the controller circuit of the automatic steering integrated device
3 实车验证
3.1 试验方法及步骤
试验方法:自动转向集成装置试制实物如图13(a)扬示,为验证该装置及其电控系统的适用性及控制算法的控制性能,将本装置加装在一台高地隙喷雾机上,对加装自动转向集成装置系统后的高地隙喷雾机进行试验测试,试验场地为安徽农业大学机电园的一块试验田内,如图13(b)扬示。
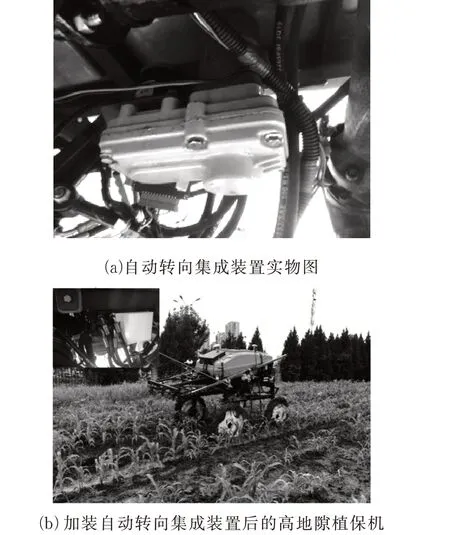
图13 高地隙植保机自动转向试验图Fig.13 Experimental diagram of automatic steering of high ground clearance planters
可以看出该装置设计体积小巧,能够很便捷的安装在高地隙植保机上,分别探究以不同的目标车轮角度、目标车轮角速度发送给高地隙喷雾机自动转向集成装置系统后的高地隙喷雾机车轮自动转向控制的效果。
试验步骤:首先将高地隙喷药机点火发动,从而确保整车转向液压系统工作,然后给自动转向集成装置供电,启动该自动转向系统,将自动转向控制器通过CAN转USB的PCAN模块与电脑相连接,电脑端通过CAN通信软件PcanView软件下发自动转向指令,下发控制指令的通信速率设置为50 Hz/s,转向指令为不同角度及不同角速度下的阶跃信号,并通过单片机的串口模块实时采集转向角度数据。
3.2 目标车轮角度控制试验及分析
上位机通过CAN通信下发不同阶跃信号的目标车轮角度指令,对角度控制响应试验分别进行了两次不同的试验,控制车轮转向响应曲线如图14扬示。
图14(a)中初始角度为-20°,通过CAN通信发送一个目标角度为20°的阶跃指令,使得其转向角度跨度为40°。
图14(b)中初始角度为20°,通过CAN通信发送一个目标角度为每次逐次递减10°的阶跃指令,最后转向到-20°,从最左端转到最右端,两次不同的试验能够较好地观测该转向系统在不同目标角度下转向的效果,较符合实际转向。
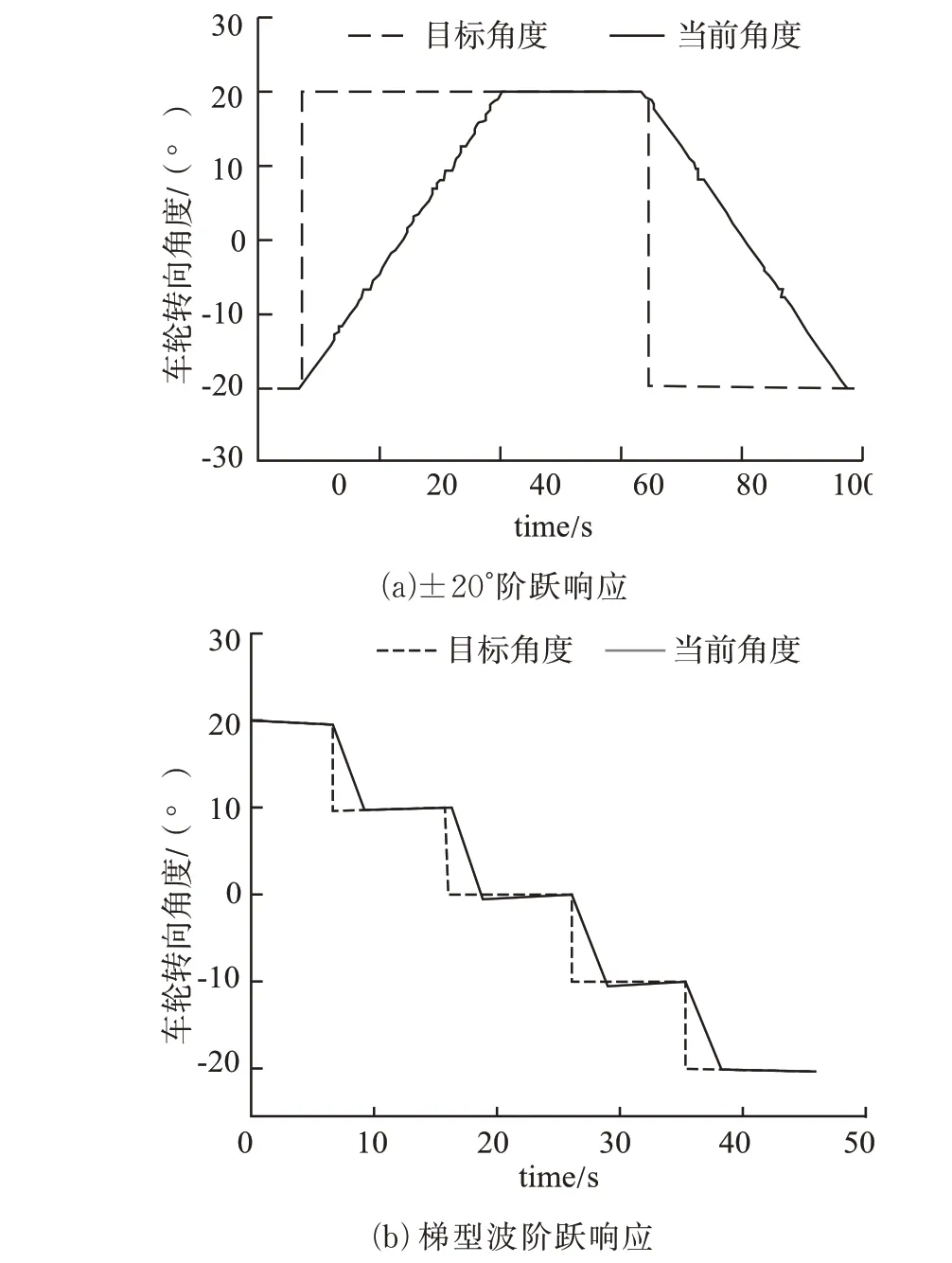
图14 自动转向集成装置系统控制车轮角度响应图Fig.14 Response diagram of the automatic steering integration unit controlling the wheels
由图中数据可看出,当上位机发送一个阶跃目标角度时,自动转向集成装置电控系统控制车轮平稳可靠的跟随目标角度直至稳态,且不同的阶跃信号均有较好的执行效果。
当控制达到稳态时,图14(a)和图14(b)中车轮角度响应超调量小于2%,稳态误差小于0.2°,且可以看出由于设置不同的角速度,使得控制的响应速度不同,试验结果符合本文设计的车轮角度闭环控制算法。
3.3 目标车轮角速度控制试验及分析
为检测设计的角速度控制算法的效果,通过CAN通信下发不同的车轮转向角速度下的阶跃信号至控制器,保证目标角度一致,此时均为±20°,为较好反映实际转向中车轮的转向情况,分别测试在低、中、高三种转向角速度方式下的控制特性,观测车轮在不同转向角速度工控下的车轮响应曲线,实时采集数据见图15。
由图15可看出,在低、中、高三种车轮转向角速度情况下,当前高地隙喷雾机的车轮转角依旧能平稳可靠达到目标位置,且在图15(c)中的高速情况下,±20°车轮自动转向最快时间为1.3 s,超调量均小于2%,稳态误差小于0.2°,控制效果良好,通过上述分析可得,本试验验证的双闭环控制算法达到预期效果,且与仿真数据基本一致。
将该控制数据与文献[5]和[13]中常见的两种自动转向控制方式的转向数据相比较,如表3扬示。
由表3数据可看出,本文设计的自动转向集成装置在稳态误差上优于文献[5]中电控液压阀的转向方式,在±20°的转向角速度上优于文献[5]及文献[13]的电控方向盘两种转向方式,说明本文设计的自动转向集成装置与当前常见的自动转向控制方式相比具有一定的优异性,从而得出该自动转向集成装置控制器及控制算法满足农机的田间自动转向控制作业。
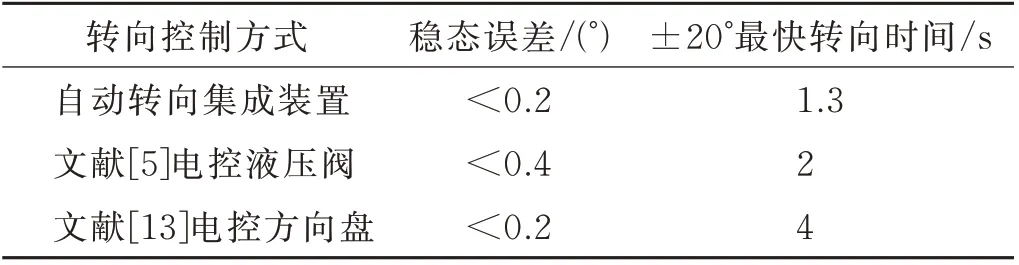
表3 不同转向控制方式数据对照表Tab.3 Data comparison table for different steering control methods
4 结论
1)设计了一款自动转向集成装置,由直流电机、减速齿轮及全液压转向器三部分组成,具有体积小巧、方便安装及成本低等优点,结构简单且各结构之间通过机械齿轮直接连接使得控制的可靠性与精度高。
2)基于自动转向集成装置设计了一款基于飞思卡尔MC9S12系列单片机的车规级自动转向电控系统,基于CAN总线通信的数据交互方式更符合农机智能控制方式,设计的智能电源电路有效地保证了自动转向集成装置系统的安全性及可靠性。
3)基于位置加速度双闭环PID控制的电机控制算法使得车轮可以以想要的转向角速度达到目标角度。基于Simulink的仿真及实车试验结果表明,不同角速度工控下的±20°阶跃信号目标角度情况下,当前转向角曲线平滑稳定的达到目标位置,最短耗时小于1.5 s,稳态误差小于0.2°,且超调量均小于2%,满足复杂田间环境下农机的转向控制作业。
