基于Adams的FSEC赛车的操纵稳定性分析*
2022-04-12张汉宇孙明珠
张汉宇,沈 辉,孙明珠
(1.扬州大学,江苏 扬州 225127;2.合肥职业技术学院,安徽 合肥 238010)
0 引言
车辆的操纵稳定性是指在驾驶者在正常舒适情况下,车辆能按照驾驶者通过转向机构以及车轮给定的方向行驶,且在遭受到外界干扰时,仍能有效抵抗干扰并保持稳定行驶的能力[1-3]。操纵稳定性不仅代表着车辆行驶的操纵方便程度,而且是决定车辆安全行驶的一个重要性能。车辆操纵稳定性常见的道路试验有蛇形驾驶试验、转向瞬态响应试验、转向回正性能试验和稳态转向试验等。
Adams由美国MDI公司开发,是CAE领域中使用范围最广、应用行业最多的机械系统动力学仿真工具,是一款集建模、求解、可视化技术于一体的虚拟样机软件[4]。Adams可建立复杂机械系统的“功能化数字样机”,在现实工作条件下模拟其运动情况,并且可以快速分析多种设计方案,寻找最优方案。
1 基于Adams/Car整车动力学模型的建立
Adams/Car模块有Standard(标准)和Template Builder(模板建模器)两种模式[4-6]。Adams/Car采用自上而下的建模顺序,即先在Template Builder中建立模板,包括前悬架、转向系、后悬架、制动、轮胎、动力总成和车身,然后在Standard中基于模板建立对应的子系统,最后将各个子系统装配组合形成整车模型。
1.1 前悬架子系统的建立
该FSEC赛车前悬采用对称的不等长双横臂式独立悬架,包括螺旋弹簧、减振器等。其整车的部分设计参数如表1所示。

表1 赛车整车部分设计参数
前悬架模板的建立过程大致如下[4-6]:
1)简化物理模型。根据子系统中各个零部件的实际相对运动关系,确立各个零部件的自由度和拓扑结构,简化模型。简化的前悬结构如图1所示。

图1 前悬架结构简图
2)确定硬点。硬点是指各部件定位、连接的关键几何定位点,在Catia中通过参数化测量,选取坐标系确定硬点坐标。整车坐标选取主环前下横梁与整车中性面的交点为原点;以赛车的纵向为X轴,赛车后退方向为X轴正方向;以赛车横向为Y轴,赛车前进时的右侧为Y轴正方向;以赛车垂直方向为Z轴,向上为Z轴正方向。所测前悬架左端各部件硬点如表2所示。

表2 前悬架左端各部件硬点参数
3)确立部件的动力学参数。确定部件的质心、质量和转动惯量。
4)创建部件的几何体。创建硬点后,在此基础上建立各部件的几何模型。
5)定义约束。按照各个部件与其他部件间的运动关系,确定约束的类型,添加运动副和轴套。前悬架系统共有4个旋转副、10个球铰副、8个万向副、2个圆柱副和2个等速副,如图2所示。前悬架系统各部件之间运动副关系如表3所示。

图2 前悬架各部件间的运动副

表3 前悬架系统各部件之间运动副关系
6)定义模板的参数变量、制动器。定义参数变量是为了便于在Standard模式中对运动、几何尺寸等进行调整,定义制动器是为了定义部件间力与运动的传递。实验测得前悬架减振器阻尼力特性并在Adams上生成属性曲线,如图3所示。

图3 前悬架减振器阻尼力特性曲线
7)定义、测试通信器。创建、测试、检查通信器信息,包括类型、名称和对称性。
创建好模板后,在Standard中建立前悬架子系统,如图4所示。
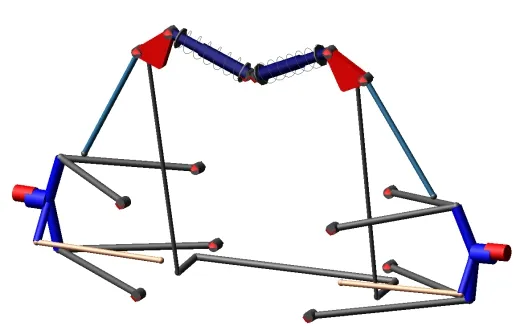
图4 前悬架子系统模型
1.2 整车模型的建立
按上述步骤建立转向系子系统、后悬架子系统、制动子系统、轮胎子系统、动力总成子系统和车身子系统,并装配成整车模型。其中制动子系统直接调用四轮盘式制动模板,轮胎子系统和动力总成子系统通过编辑属性文件等生成模板,而车身子系统只需确定质心位置生成模板即可。整车模型如图5所示。
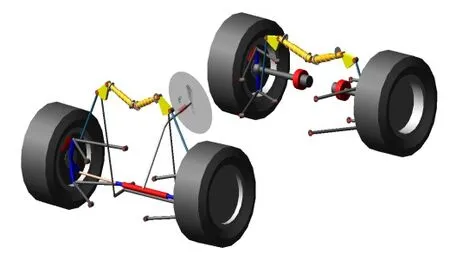
图5 整车模型
2 整车操纵稳定性仿真及评价
Adams/Car的整车仿真驱动方式有事件(Event)和演习(Maneuvers)两大类。事件类仿真是驱动模型行进在指定路面上并执行各种操作,演算类仿真是通过在模型上施加力或侧向加速度来模拟真实运动[4-6]。
2.1 稳态转向
稳态转向特性试验的目的是测定汽车对转向盘转角输入达到稳定行驶状态时汽车的稳定横摆响应。汽车的稳态响应分为中性转向、不足转向和过多转向三种。过多转向的汽车在达到临界车速时有失稳的危险,而中性转向在一定条件下会变为过多转向,因此汽车应该具有不足转向的特性[7]。
根据国标GB/T 6323—2014中的规定,并结合该FSEC赛车情况,采用固定转向盘转角连续加速法进行仿真试验。即设定赛车稳定车速为10 km/h,转向圆半径为15 m,赛车起步后以0.2 m/s2的纵向加速度缓慢而匀速地加速,直至赛车的侧向加速度达到6.5 m/s2时停止仿真[8]。设置好驱动事件,开始仿真。仿真得到车速随时间变化曲线、横摆角速度随时间变化曲线和车身侧倾角随侧向加速度变化曲线如图6~8所示。

图6 车速随时间变化

图7 横摆角速度随时间变化

图8 车身侧倾角随侧向加速度变化
根据赛车的瞬时车速Vn和瞬时横摆角速度ωn,按照公式(1)可计算出前后轴侧偏角之差α1-α2。
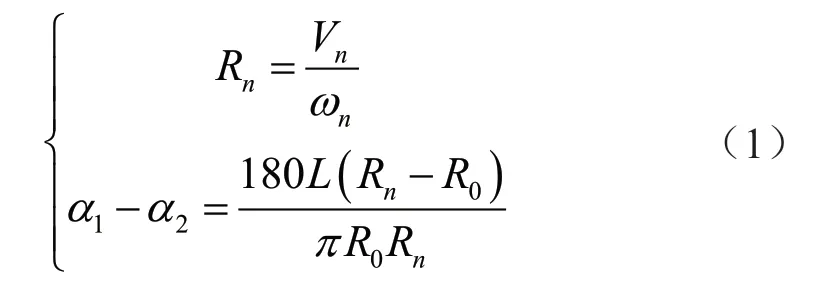
式中,n为样点编号;Rn为瞬时转向半径;L为赛车轴距;R0为初始转向半径.
从而得到前后轴侧偏角之差α1-α2随侧向加速度变化曲线,如图9所示。
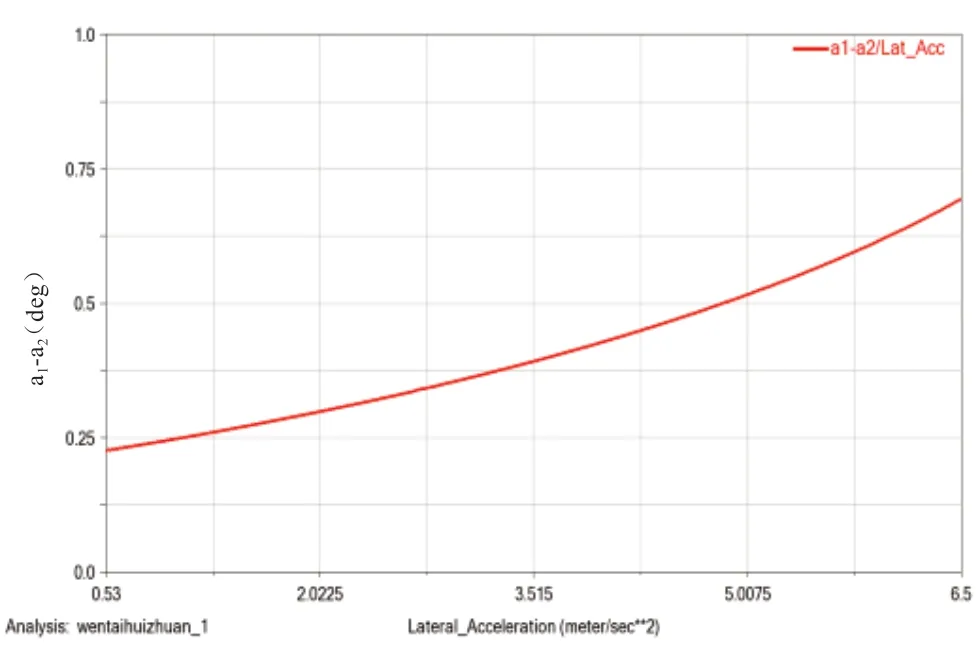
图9 前后轴侧偏角之差α1-α2随侧向加速度变化
根据QC/T 480—1999,稳态转向试验按中性转向点的侧向加速度值an、不足转向度U和车箱侧倾度Kφ进行评价计分[9-10]。中性转向点的侧向加速度值an为前后轴侧偏角差随侧向加速度变化曲线上,斜率为零处的侧向加速度值。不足转向度U为前后轴侧偏角差随侧向加速度变化曲线上,侧向加速度为2 m/s2处的平均斜率。车身侧倾度Kφ为车身侧倾角随侧向加速度变化曲线上,侧向加速度为2 m/s2处的平均斜率。具体数值和评分如表4所示。
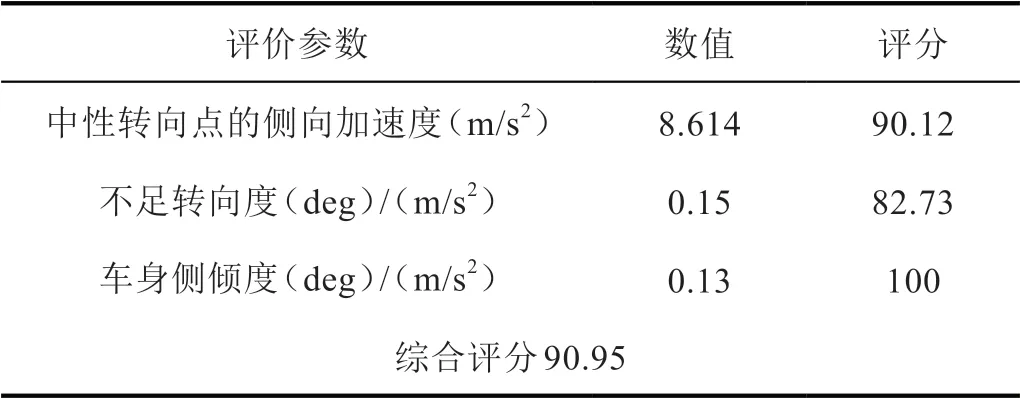
表4 稳态转向评价参数数值及评分
2.2 蛇形驾驶
蛇形驾驶试验主要是指让汽车连续穿过摆放好的有一定间距的标桩,测量汽车的方向盘转角、横摆角速度和车身侧倾角等参数,来评估车辆的过渡响应和侧倾稳定性。
根据国标GB/T 6323—2014,试验开始时,试验车速应该为基准车速二分之一并四舍五入为10的整数倍,往后逐步提高试验车速,但不超过80 km/h[8]。根据赛车情况,选取65 km/h为基准车速,且桩间距为30 m。在Adams中生成B级路面,设置好驱动事件,开始仿真。仿真得到横摆角速度随时间变化曲线、方向盘转角随时间变化曲线如图10、图11所示。

图10 横摆角速度随时间变化

图11 方向盘转角随时间变化
根据QC/T 480—1999,蛇形试验按基准车速下的平均横摆角速度峰值τ与平均方向盘转角峰值θ进行评价计分[9]。由图10、图11可得平均横摆角速度峰值τ为15.795°/s,平均方向盘转角峰值θ为7.183°。根据标准得蛇形试验评分如表5所示。

表5 蛇形试验评分
3 结论
本文主要通过Adams对赛车各子系统建模,并在装配组合成整车模型后,对其进行 操纵稳定性的稳态转向试验仿真和蛇形驾驶试验仿真,得到稳态转向试验仿真和蛇形驾驶试验仿真的综合评分分别为90.95分和89.70分,为后续优化赛车操纵稳定性提供了对比依据,有效降低赛车研发成本。
