多足机器人单腿运动学分析*
2022-04-12周伟
周 伟
(长安大学工程机械学院,陕西 西安 710064)
0 前言
伴随着科学技术的日新月异和人类探索领域的不断扩大,人类对于机器人的研究和利用也在不断增多。在北京冬奥会上就出现了送餐机器人、防疫机器人和火炬传递机器人等服务型机器人,在工业制造[1]、抢险救灾[2]和农业生产[3]等领域也可以看到各种机器人的身影。可以说,机器人已经真真切切地走进了人们的生活[4]。
当前,机器人的行走方式主要有以下三种:靠轮子滚动的轮式机器人,利用履带行走的履带式机器人和以仿生学为基础的多足步行机器人。其中轮式机器人在一般平坦路面上具有行驶效率高和速度快等优点,但其越障能力较差,转弯效率较低,不适合复杂地形的行走[5]。履带式机器人与地面有更大的接触面,从而增大摩擦,适合复杂路面的行走,但其运动速度慢,结构复杂,能耗高[6]。而多足步行机器人的运动足迹是由许多离散点组成,因此其不但对崎岖地形有很强的适应性,而且因为其腿部拥有较多自由度,运动更加灵活方便,从而有较好的越障与避障的能力[7-8]。基于上述比较,本研究将对一款可用于多足机器人的通用三自由度的机械腿进行研究,机械腿三维结构如图1所示。

图1 机械腿三维结构
本论文的其余部分组织如下,第一节,先对机械腿进行模型简化,建立D-H模型,求出正运动学的解;第二节,通过几何法和代数法结合,求出逆运动学的解;第三节,通过Matlab Robotic Toolbox对推导的运动学进行仿真验证;第四节,运用蒙特卡洛数值分析法对足端工作空间进行仿真分析;第五节,对全文进行总结。
1 正运动学求解
机械腿的正运动学求解:已知连杆几何参数及各关节转角,求足端位置[9]。首先对机械腿进行模型简化,再采用D-H建模法[10]对该机械腿建立各连杆坐标系,如图2所示。然后确定D-H参数,如表1所示。
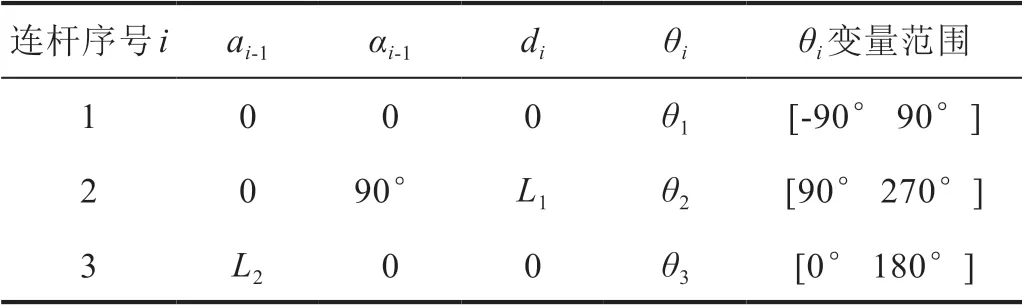
表1 机械腿D-H参数
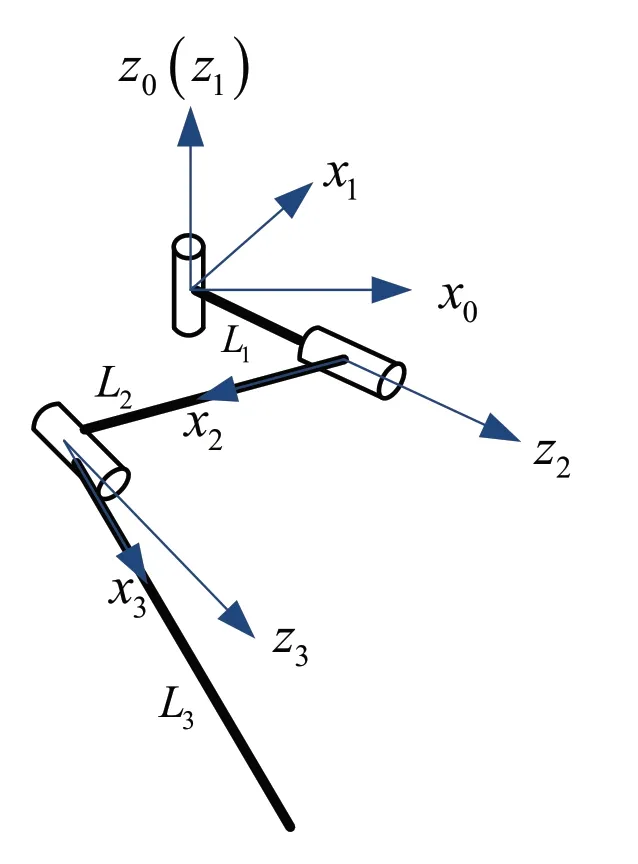
图2 机械腿的连杆坐标系
根据连杆坐标系间的变换矩阵,可得腿部连杆坐标系间的变换通式
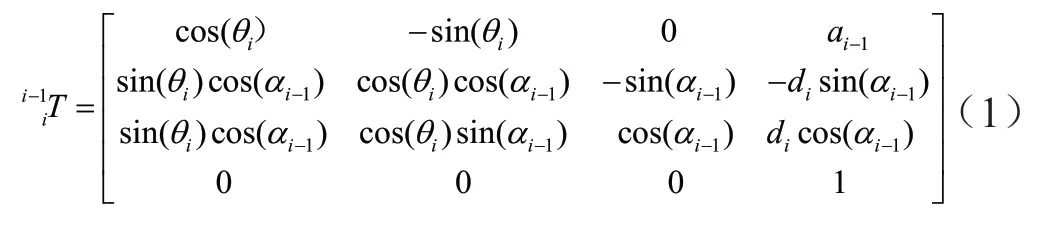
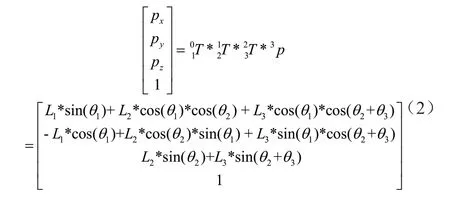
将表1中的数据代入(1)中,可得到连杆L1、L2和L3对应的坐标变换矩阵。并且足端位置相对于第3个关节坐标系的坐标为3p=[L30 0 1]T,所以可求得正运动解如下:
2 逆运动学求解
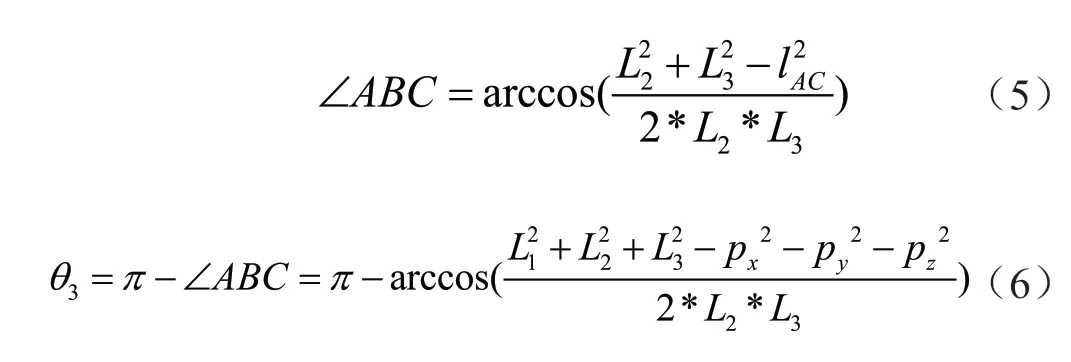
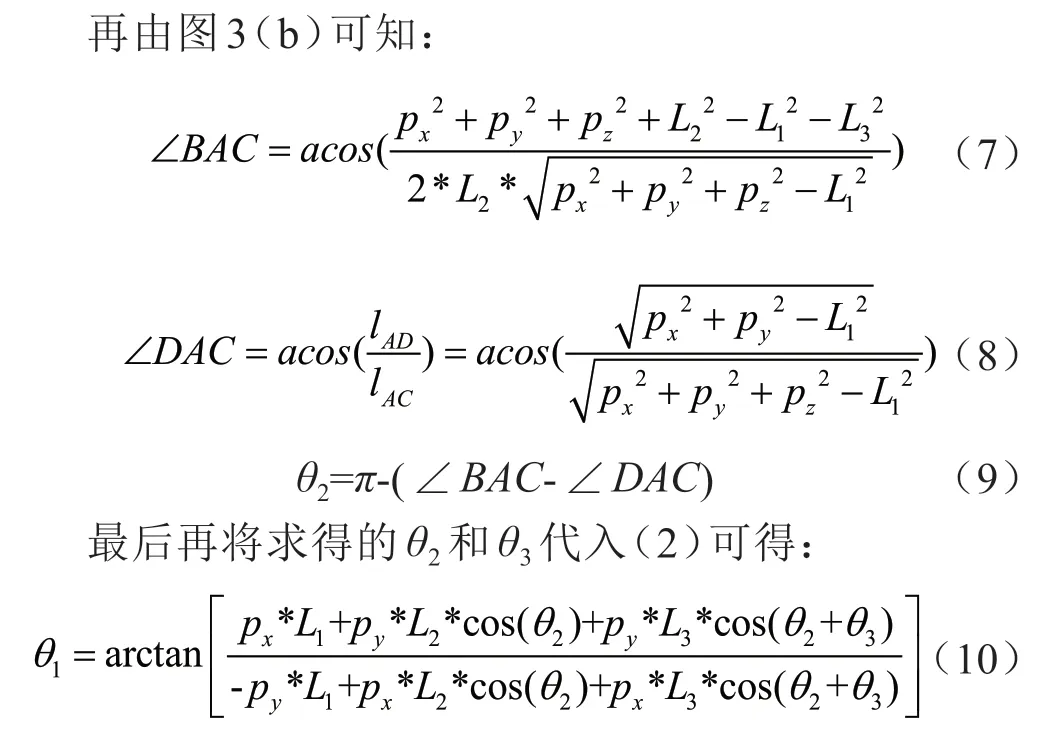
对于机械腿的逆运动学求解,即已知连杆几何参数及足端位置坐标,求达到该位置的各关节角度值[9]。这里采用几何法和代数法进行联合求解,首先对于θ3,由图3(a)可知:
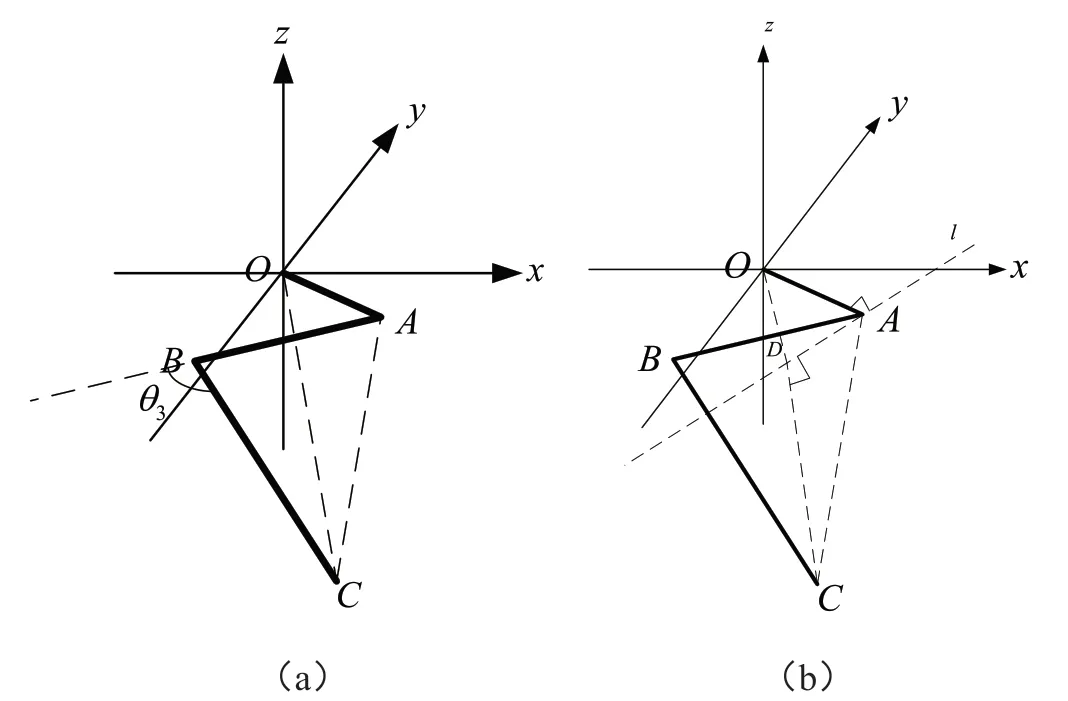
图3 腿部连杆模型

又因为连杆L1与连杆L2和连杆L3组成的平面垂直,所以有lOA⊥l ,即:

在ΔABC中,由余弦定理可求得:
3 基于Matlab Robotic Toolbox的运动学仿真验证
这里使用Matlab Robotic Toolbox[11]建立机械腿模型,如图4所示,然后在关节变量的取值范围内进行验证。研究者在各关节角内随机取值,代入正运动学方程式(2)中可求得相对于关节坐标系的坐标值,再将该坐标值代入逆运动学方程中,得出各关节角度,并与开始输入的角度进行比较,便可验证上述运动学方程的正确性。通过Matlab Robotic Toolbox的仿真实验,验证了本文中运动学方程的正确性。
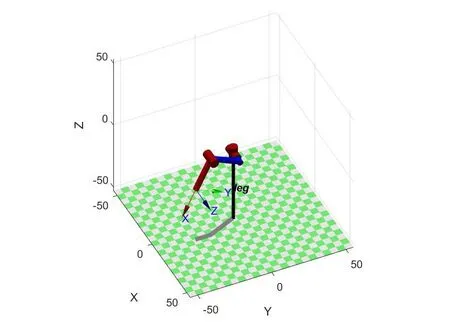
图4 Robotic Toolbox 机械腿模型
4 足端工作空间分析
多足机器人足端工作空间是指其足端可以抵达的足迹点形成的空间集合,该空间区域表示机器人足端的运动区域。该区域是评价多足机器人运动性能的一个关键参考量,是衡量多足机器人的步距以及避障能力等运动性能的理论指标之一。当前,可以利用图解法、数值分析法以及解析法来计算分析多足机器人的足端工作空间。其中,图解法最为直观简明,但这种方法受限于腿部自由度,分析对象的关节数过多时,则需进行分组处理,从而加大了分析难度;解析法牵涉到运动学逆矩阵以及非线性方程的求解,其表达式十分复杂,不适合现代工程的实际应用[12];数值法则是在计算机上通过计算多足机器人足端的离散点,从而得出工作空间,本质上是任意地取足够多独立的各关节变量的组合,然后使用运动学方程式来求解腿部足端的坐标值,求出的坐标点集合就组成了该机械腿的工作空间,并且坐标点数量越多,就越能反映多足机器人腿部的实际工作空间[13]。本研究运用蒙特卡洛数值分析法[14]对足端工作空间进行仿真分析。
足端工作空间求解步骤如下:
1)设置好实验所需采集的点数,点数尽量取多些(这里取了10 000个点);
2)通过随机函数在各关节区间内取均匀散布的伪随机数值;
3)利用伪随机数来计算产生各个关节的随机数组值;
4)将产生的各关节变量的值代到运动学的正运动学方程式中,求出位置分布的点云图。
最后利用Matlab Robotic Toolbox可以可视化地求出该机械腿的工作空间,如图5所示。其中左上图、右上图、左下图和右下图分别为足端工作空间的三维视图、XY平面视图、XZ平面视图和YZ平面视图。
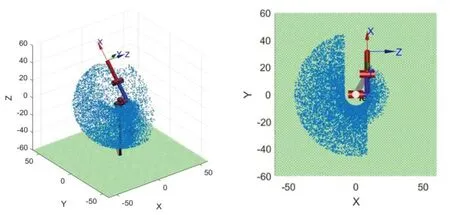

图5 单腿足端工作空间仿真
5 结论
本研究以多足机器人具有通用性的三自由度机械腿为研究对象,对其进行D-H建模,求解其正运动学;并采用几何法和代数法联合的方式求解其逆运动学。然后,通过Matlab Robotic Toolbox进行运动学结果验证。最后,通过对机械腿进行足端工作空间分析来确定足端的活动范围,采用蒙特卡洛数值分析法来对足端工作空间进行仿真分析。研究结果为后续的多足机器人运动控制研究奠定了一定的基础。
