基于EV_Globe的无人直升机航路规划软件系统设计与实现
2022-04-12程滔
程滔
(中国直升机设计研究所,江西景德镇,333001)
0 引言
随着IT、计算机软硬件技术及GIS理论的发展,航路规划软件的复杂度越来越高,用户对外部环境的感知能力要求越来越高[1]。选择一款合适的三维平台开发航路规划软件,可以帮助操作员快速、直观的获取无人直升机姿态、航迹等重要信息。
EV-Globe是新一代海量空间信息服务平台[2]。EVGlobe将二三维一体化管理,实现数据结构一体化、空间存储一体化、风格显示一体化、操作编辑一体化及二维数据三维化表达;EV-Globe是ServiceGIS平台,能够聚合和发布符合OGC标准的WMS、WFS等多种GIS服务;EV-Globe在云端实现矢量、影像、三维模型等数据访问、地理分析功能;EV-Globe内核采用C++语言进行开发,封装了C#、Java等多种接口,应用于各种平台。利用EV-Globe能够快速构建三维控件信息服务系统。
本文是在EV-Globe平台上,利用二三维一体化技术和云GIS技术,将无人直升机模型嵌入到三维动态空间中,结合卫星影像地图、数字高程数据及矢量地理信息,在三维虚拟空间中对无人直升机便捷高效航路规划,将姿态、航迹等信息直观显示,增强操作员的外部环境感知能力。
1 系统目标
1.1 实现航迹三维可视化
结合卫星影像数据、数字高程数据及矢量地理信息等,基于二三维一体化技术,仿真真实飞行环境,实现航迹的三维可视化,结合航姿等重要信息的显示,增强操作员的外部环境感知能力。
1.2 实现离线航路规划
离线航线规划是软件系统基本功能,即在本地规划航线,实现航线的增删改查等基本功能。
1.3 实现在线航路规划
在线航路规划是软件系统核心功能,即系统与无人直升机进行通信,完成航线加载及其他相关控制功能,同时接收飞行遥测数据,实时更新航路信息。
1.4 实现三维态势可视化
在三维场景下,结合外部态势信息输入,实现基本图元、态势信息的添加,态势推演等功能。
1.5 实现空间数据处理
在三维场景下,结合航路规划任务,实现空间测量及空间分析等基本辅助手段。
1.6 实现高效的人机工程
在系统人机界面设计过程中,要求界面友好,操作方便快捷,满足基本的操作,方便地进行放大、缩小、旋转、二三维切换、飞行定位、全幅显示、全屏显示、最小化等。
1.7 实现快速的软件维护模式
为提高软件的维护性,缩短软件的维护周期。航路规划软件采用“平台+插件”的软件框架,在不修改程序主体的情况下,对软件功能进行修改和维护。
2 EV-Globe平台简介
本系统采用的EV-Globe5是由北京国遥新天地信息技术有限公司开发的具有自主知识产权的三维控件信息平台。EV-Globe5产品主要由EV-Server服务平台、EV-Globe Desktop桌面平台、EV-Create数据处理软件、EV-Globe Runtime支持库及EV-Globe SDK二次开发组件等组成。平台应用在军事、海洋、国土、林业、环保等多个领域。
EV-Globe5支持对遥感影像数据、数字高程数据及矢量地理信息数据的处理。EV-Globe 5支持Web数据源、空间数据库数据源、文件型数据源;Web数据源由EV-Server发布,支持影像、DEM、矢量瓦片及模型图层的发布;空间数据库数据源由EarthView空间数据引擎提供支持,支持Sqlite、Oracle、SqlServer数据库驱动;文件型数据源支持kml/kmz、海图、Tiff、Image、ShapeFile、倾斜摄影模型等数据格式。EV-Create是EV-Globe影像瓦片生产工具,是一款为EV-Globe量身打造的辅助性工具。该工具针对栅格数据进行预处理,满足大数据在EV-Globe场景中高效加载和快速展示的性能要求。
EV-Globe5全平台支持,能够开发C/S架构的桌面GIS应用、B/S架构的WebGIS应用、基于移动设备的移动App GIS应用。
3 系统硬件组成
航路规划软件系统硬件设备主要由数据服务器、航路规划席位、数据综合处理席位及相应的网络设备组成,系统硬件结构如图1所示。
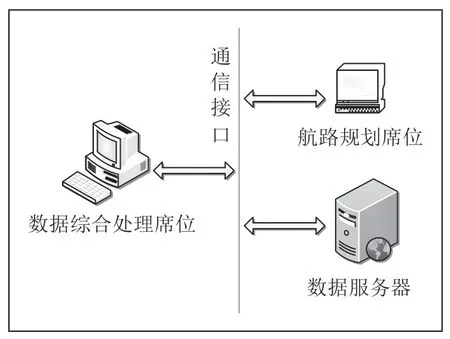
图1 系统硬件结构图
(1)数据服务器
数据服务器主要用于存储遥感影像数据、数字高程数据及矢量地理信息数据等。
(2)航路规划席位
航路规划席位主要用于运行航路规划软件,提供软件运行平台。
(3)数据综合处理席位
数据综合处理席位主要用于运行数据综合处理软件,数据综合处理软件功能是在任务中接收实时数据,与航路规划席位保持通信,保证航路规划席位的上下行数据通信。
4 系统框架设计
航路规划软件系统采用Qt开发,包括4层系统架构,即应用层、服务层、数据层、平台层,如图2所示。

图2 系统框架图
平台层:平台层为数据层和服务层提供运行环境支撑,为应用层提供软件运行环境、硬件设备的统一封装。
数据层:数据层为基础地理数据、遥感影像数据、数字高程数据等信息数据的存储管理,为服务层提供数据支持。
服务层:服务层在应用层和数据层之间,封装并实现各项基础服务,读取存储在数据层的数据,接收应用层的服务请求,为应用层提供基础服务支撑。
应用层:应用层为用户提供人机交互界面。应用层各软件相互配合、协作,共同构成整个软件系统,与系统的硬件相互配合,为用户提供无人直升机航路规划服务。
5 系统功能设计
根据系统建设目标,功能设计有航迹三维可视化、离线航路规划、在线航路规划、三维态势可视化、空间数据处理、快速定位模块及插件模块等七个模块。

图3 系统功能框图
(1)航迹三维可视化
航迹三维可视化模块对遥感影像数据、数字高程数据等的管理,支持对kml/kmz、海图、Tiff等多种数据格式。通过遥感影像数据和数字高程数据的叠加,操作员可以直观感受无人直升机航迹变化。
(2)离线航路规划
离线航迹规划实现本地航路规划及航线管理功能。航路规划是规划航线,同时对航路进行编辑,包括航线/航点的增加、删除、修改、查询等功能;航线管理是在本地对航线进行打开、保存等功能。
(3)在线航路规划
在线航路规划是实现系统与无人直升机的上下行通信功能,包括在线规划、冲突检测及实时显示与分析三个子模块。在线规划完成航线加载至无人直升机及其他相关控制指令;冲突检测完成本地航线的智能判定,对航线的高度、速度等设置的合理性给出结论,保证航线的可行性;实时显示与分析完成实时遥测数据的解析,同时更新无人直升机的位置信息及姿态等重要参数信息。
(4)三维态势可视化
三维态势可视化实现基本图元和态势的标绘。基本图元标绘包括平面图元、立体图元及特殊图元等的标绘;态势标绘包括军标标绘及军标推演。系统可以对已完成的态势信息保存及重新加载。
(5)空间数据处理
空间数据处理实现空间量算及空间分析功能。空间量算完成点位信息及距离、面积等测量;空间分析完成通视、坡度等分析。
(6)快速定位模块
快速定位模块实现系统中位置信息查询,可以快速定位至地图中任意位置。系统可以对已完成快速定位信息保存及重新加载。
(7)插件模块
插件模块实现快速的软件维护模式,包括插件管理、通信管理及界面布局管理三个子模块。插件管理完成插件配置信息的获取及判定,插件的加载及卸载等;通信管理完成主程序与插件与插件之间的通信;界面布局管理完成工具栏、功能栏等的布局。
6 数据预处理
为了数据在EV-Globe5场景中高效加载和快速展示,需要对数据进行预处理。数据预处理包括对遥感影像数据、数字高程数据及矢量地理信息数据等。遥感影像数据可以直接加载至EV-Globe5平台中,但是,如果遥感影像数据过大为GB级别或者TB级别,EV-Globe5三维场景中加载与显示遥感影像数据的效率会下降。
遥感影像数据、数字高程数据及矢量地理信息数据预处理方法相似,此处只对遥感影像数据预处理进行描述。遥感影像数据的预处理流程如图4所示,主要包括加载影像数据、设置影像数据输出类型、加载背景数据、设置影像数据输出路径和影像数据缓存生成。

图4 数据预处理流程
(1)加载影像数据:遥感影像数据预处理数据格式支持Erdas、Img及Tif;
(2)设置影像数据输出类型:输出类型有两种方式,一种是瓦片文件,一种是库文件。瓦片文件是以行列号命名的栅格影像瓦片文件;库文件是将数据输出至DB库中;
(3)加载背景数据:背景数据是一组由EV-Creator生成的缓存数据,主要用于弥补在处理栅格数据时产生的不完整瓦片,增加栅格数据在EV-Globe5三维场景中的显示效果;
(4)设置影像数据输出路径:设置需要输出预处理遥感影像数据文件的路径;
(5)影像数据缓存生成:参数设置完成后,生成遥感影像预处理数据。
7 系统软件设计与实现
7. 1软件设计
软件设计如图5所示。系统软件由运行在航路规划席位的航路规划软件和运行在数据综合处理席位的数据综合处理软件两部分组成。

图5 系统软件设计
航路规划软件在EV-Globe平台的支持下,通过调用卫星影像数据、数字高程数据等信息,构建虚拟的三维地理环境。在试验试飞过程中,通过数据综合处理软件进行上下行数据通信,完成无人直升机模型驱动、模型特效展示等操作的可视化。EV-Globe平台主要为航路规划软件提供卫星影像数据、数字高程数据及矢量地理信息等。航路规划软件包括航线规划、航线管理、实时显示及其他相关模块。
数据综合处理软件主要完成上下行数据的实时接收和处理,与航路规划软件采用UDP协议进行通信,接收航路规划软件的遥控数据并组帧发送给地面数据终端,同时接收数据链飞行遥测数据并向航路规划软件转发实时转发。数据综合处理软件包括通信管理、综合管理、数据管理及其他相关模块。
7.2 软件实现
航路规划软件通过读取配置文件对系统进行初始化,加载地图、场景等要素,同时加载态势等信息。通过接收数据综合处理软件发送的遥测数据,更新无人直升机的位置及姿态信息。同时,航路规划软件发送控制信息至数据综合处理软件。
数据综合处理软件接收航路规划发送的航线加载数据及其他控制信息数据,完成组帧后发往无人直升机平台。同时,数据综合处理软件接收实时遥测数据并转发至航路规划软件。
8 应用
在某项目中,应用基于EV-Globe5平台进行开发。在Windows环境下采用Qt5.5.1进行软件开发,将含有放大、缩小、及飞行定位等功能的工具栏布署在界面右侧,将含有影像地图、航线规划等功能的功能栏布署在界面下方。
实践表明,基于EV-Globe5的无人直升机航路规划软件系统三维场景显示效果好、响应速度快,运行稳定,能够满足无人直升机航路规划的需求。
9 结束语
无人直升机在军民领域使用的越来越多,在军事领域,可用于作战、侦查、监视等;在民用领域,可用于灾害救援、街景拍摄、监控巡查、环保监测、电力巡检、农业植保等方面。航路规划是无人直升机使用过程中重要的功能之一,航路规划软件系统与用户进行人机交互,直接影响用户对整个系统的认可度。
本文从系统需求出发,对无人直升机航路规划软件系统进行了设计与实现。系统利用二三维一体化技术,将遥感影像数据及数字高程数据等数据进行管理及显示,使得操作员能身临其境的了解航路的变化。
在三维平台方面,国内外有多种平台可以使用,国外的有GoogleEarth、SkyLine等,国内的有EV-Globe、GeoGlove等。EV-Globe是国内较优秀的三维平台,相对国外GoogleEarth等发展较早产品,在平台功能、界面设计等方面还有一定差距,但是随着团队的不断更新维护,用户群的不断扩大,其功能越来越强大,对国内三维GIS的发展起到促进作用。
