电动汽车单踏板动力控制策略优化
2022-04-12徐明毅
徐明毅
(武汉大学水利水电学院,湖北 武汉 430072)
1 研究背景
汽车工业现正处于从传统燃油车演变到新能源汽车的过渡阶段,单踏板制动技术作为应用在纯电动汽车上的新技术逐渐受到较多关注。单踏板制动技术通过将制动回收功能集成到加速踏板上,仅通过单踏板操作就可实现车辆的加速、减速和停车等车辆的状态控制。单踏板制动技术不仅满足了纯电动汽车制动能量回收功能,同时也降低了制动踏板使用频率,简化了驾驶操作,已被较多汽车企业采用,目前已有宝马i3、日产Leaf、雪佛兰Bolt以及特斯拉Model Y等车型采用单踏板制动技术[1-3]。
但是现阶段,采用单踏板技术的电动汽车并不是只有1个踏板,而是同时配备了刹车踏板,即仍需要刹车制动功能。虽然在正常驾驶情况下,单踏板足以完成大多数加速、减速操作,但在遇到紧急情况需要急刹时,驾驶者仍然需要刹车踏板来完成。因此,采用单踏板模式的电动汽车仍然属于双踏板车型,或者说,处于从双踏板汽车转变到单踏板汽车的过渡状态。同时,单踏板模式也引起不少争议,很多初次接触单踏板模式的驾驶者无法很好适应这套操作习惯,动能回收较难精准掌握导致了车辆产生强烈顿挫感,有人甚至质疑单踏板驾驶会造成一定的安全风险。
本文尝试分析现有单踏板模式的利弊,对改进动力控制及刹车操纵性能提出了优化思路和合理建议,以促进智能电动汽车的进一步发展。
2 现有单踏板模式的特点
传统自动挡汽车的驾驶常采用双踏板控制(手动挡车型会多一个离合器踏板)。制动踏板操纵制动力的大小主要用于减速、停车。加速踏板又称油门踏板,主要控制发动机的动力输出,用于车辆加速。二者功能相对单一且独立,操纵逻辑十分清晰。但新手司机易于将油门当作刹车误踩,从而出现交通事故。为安全起见,将2个踏板误操作同时踩下时,操作逻辑是制动优先,此时能够及时刹车。而如果刹车时误踩油门,此时油门踏板的加速度往往远高于正常被踩时的加速度,若在油门踏板处设置1个加速度传感器,当油门踏板加速度大于设定值时,制动执行装置即被启动,使误踩油门时会自动刹车[4-5],但此类防误踩装置由于会增加费用,故还未被广泛采用。
电动汽车为简化操作引入了单踏板模式,它将加速和制动集成在一个装置上,也就是说仅凭一个踏板基本就能控制加速和减速,这与传统汽车的驾驶模式不同。单踏板模式充分利用了电动汽车基本不需要变速箱,仅凭高转速、高扭矩的电机就能驱动车辆的特性。当驾驶者踩下油门踏板时,电机接收到加速指令,从而开始增强功率完成加速过程;而驾驶者松开油门踏板,电机则开始回收车辆动能,从而降低车速。单踏板模式不仅能够通过能量回收机制大幅提升车辆的续航能力,还有效减少了制动触发的次数和力度,降低了液压制动的负担,在一定程度上延长了制动系统的使用寿命。
根据结构和控制原理不同,再生制动有串联式和并联式之分[2]。串联式再生制动的主要特点为优先产生再生制动转矩,当再生制动转矩不满足制动需求时,不足部分由机械制动补充。而并联式再生制动是再生制动转矩和机械制动转矩相互独立,并将再生制动分为滑行回收和制动回收2个阶段。车辆处于滑行回收阶段时,只有再生制动转矩;当制动踏板开度增加,进入制动回收模式,此时再生制动转矩和机械制动转矩共同起作用。从理论上看,串联式再生制动使能量回收率高,但刹车控制弱,而并联式再生制动刹车控制强,但能量回收率降低。若要兼顾能量回收率和刹车控制强度,可在车速较高时优先使用再生制动以回收能量,且随着踏板行程逐步提高再生制动强度,在车速降到一定程度再生制动难以利用时,机械制动适时介入直至完全刹停。这种模式并非单纯的串联或并联,而是混合制动模式,即串联-并联-串联的模式,既能满足刹车强度逐渐增大的需要,又能尽量回收能量。由于这种理想情况系统控制较为复杂,还需要在实践中确定再生制动和机械制动的混合比例和介入时机,逐步调整优化。
现有的单踏板制动技术的控制原理如图1所示。在某一车速下,加速踏板在滑行区间时,电机不输出转矩或输出较小转矩,此时车辆为滑行状态。当加速踏板在滑行区间深踩踏板时,车辆进入驱动状态,电机产生驱动转矩使车辆加速。当松开加速踏板时,车辆进入制动回收区间,电机产生制动回收转矩,车辆除受到滚动阻力和空气阻力外,还受到电机制动阻力。

图1 现有单踏板动力控制策略
驾驶者一旦熟悉了“单踏板”模式,在拥挤的城市路况下驾驶疲劳感将大大减小。此外,“松踏板即刹车”的特性可让刹车介入时间早于传统车辆,减少反应时间,提升行车安全性。在“单踏板”驾驶模式的普及过程中,尽管短期内会有一些不适应,但其最终目的是更加简化的操作逻辑,让驾控愈加轻松智能。这与“双踏板”自动挡车型代替“三踏板”手动挡车型的经历有些相似,因为智能化、简约化的趋势是不可逆转的科技发展潮流。
但是现有电动汽车的单踏板模式仍然不够完善。从表面上来看,单踏板模式确实是大幅减少了驾驶者在加速踏板和制动踏板之间来回切换的次数,但是对于没有接触过单踏板模式的驾驶者而言,踏板开度控制并不好把控。因此单踏板模式虽然在正常情况下足以完成大多数加速和减速的操作,但是在紧急情况下驾驶者依然需要踩下刹车踏板来完成紧急制动。从这个意义上说,现有的单踏板模式并不完整,还需要增加刹车踏板来实现完整功能,这也是现有电动汽车的真实选择。
传统燃油车没有“松踏板即刹车”的能量回收概念,在驾驶传统汽车遇到紧急情况时,驾驶者会潜意识地踩下刹车踏板,由此导致的一条安全原则,即驾驶者在不需要踩油门时将右脚放在刹车踏板上。这一原则不仅能够让驾驶者在紧急情况下能够第一时间踩下刹车踏板,并且还能避免出现“油门当刹车”的误操作。电动汽车的单踏板模式违背了这一条安全原则,容易引发安全问题。虽然单踏板模式也有刹车踏板,但在紧急情况下必须首先将脚从油门踏板切换到刹车踏板上,使动作复杂化了,从而失去了宝贵的制动时间。一个长期将脚放在一个踏板上的驾驶者,平时很少有“事故演习”的机会,在紧急情况下很容易直接踩下踏板,酿成“油门当刹车”的事故。从这个意义上来说,单踏板模式存在着安全隐患,在平时可将单踏板当作刹车使用,但在紧急情况下又不能当作完全的刹车使用,这增加了出现事故的可能性。
3 现有单踏板模式的改进
从以上分析可以看出,现有电动汽车的单踏板模式使驾驶操作更加便利,在将油门踏板改造为单踏板后,踩下踏板可以加速,松开踏板可进行再生制动减速,但紧急情况下驾驶员可能潜意识猛踩踏板意图刹车,而此时反而为加速状态,从而导致事故。综合来看,现有的单踏板模式没有实现完整功能,踩下是加速,放开是轻刹,急刹却没有,急刹还是要把脚切换到刹车踏板上,这不是完整的单踏板模式,会带来突发切换失误导致的事故隐患。
因此,现有的单踏板模式处于较为矛盾的状态,要么重安全、轻舒适,这样将不停在加速、刹车踏板之间切换,即为双踏板的控制逻辑,发挥不出单踏板的便捷优势,要么重舒适、轻安全,在遇到突发情况时,要完成抬脚、挪脚、踩下的连贯动作,增加了出错概率。要化解安全性和舒适性之间的矛盾,需要转变一下思路,即将现有的单踏板模式改造为在刹车踏板上实现。
遵循“安全第一,刹车优先”的原则,将单踏板模式合并到刹车踏板上,这样轻踩踏板为轻刹,重踩踏板为急刹,松开踏板为加速,操作方向与现有的单踏板模式正好相反,优点是用单踏板实现了加减速的完整逻辑,可从操作原理上杜绝误踩踏板导致加速的可能性,达到既操作简便又安全可靠的目的。这样定义的单踏板首先是刹车踏板,安全性得到满足,由于无需挪脚,舒适性也得到了保证。
改进的单踏板动力控制策略如图2(a)所示,踏板行程定义如图2(b)所示。在某一车速下,单踏板在踏板行程中部的滑行区间时,电机不输出转矩或输出较小转矩,此时车辆为滑行状态。通过滑行区间轻踩踏板时,车辆进入制动回收区间,电机产生制动回收转矩,在进一步深踩踏板时,在能量再生制动的同时,机械制动介入,刹车强度继续增大,直至车辆刹停。从刹停位置逐渐松开踏板时,由于车速为零,没有再生制动,而机械制动逐渐减弱至零,踏板又回到中部位置,但由于踏板行程方向相反,此处设定为蠕行区间,电机输出较小动力,使车辆进入蠕行状态,此时若要刹停车辆,只需略微踩下踏板即可,这便于车辆在慢速状态下的即时控制。从踏板中部位置继续抬起,车辆进入驱动状态,电机产生驱动转矩使车辆加速。踏板松开越多,则动力输出越大,但完全松开时,电机动力输出停止,车辆保持滑行状态。在踏板的加速区间,判断踏板的行程方向,若从松开状态转变为踩下状态,则动力输出立即停止,即进入滑行状态,此时车辆在滚动阻力和空气阻力等作用下自然减速,该控制策略如图2(a)所示。可以看到,结合踏板的行程区间和行程方向,可定义单踏板的动力控制逻辑,使加减速的操作幅度较小,减轻驾驶者的操作强度。
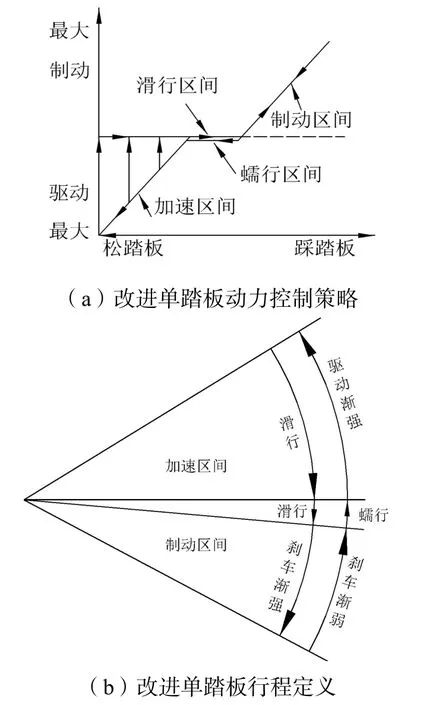
图2 改进单踏板动力控制设计
以上单踏板动力控制改进方案虽然优点明显,即控制逻辑完整,操作十分简便,但也有不足:对操作的精细度要求提高,使用初期可能不太习惯。为了保持使用习惯以便自然过渡,可将原有的刹车踏板保留,而将油门踏板改造为刹车优先的改进单踏板模式,踩下为刹车,抬起为加速,并结合踏板行程方向进行智能判断。在加速区间内抬起踏板为驱动,而反向操作不会发生作用,只使车辆保持滑行。为进一步增强安全性,还可将加速区间设置为迟滞区,即在该区间内短暂停留后才进行加速,而直接放开踏板,则快速通过该区,使车辆在踏板不受力时保持滑行。这样提高驱动作用的难度,可满足潜意识猛踩踏板即为刹车的安全优先准则。当然,要设计出符合人机工程学的单踏板操纵机构,达到智能判断准确可靠,迟滞时间合理可行,反馈力度清晰可控[6],还需要在实际应用中不断优化。
从长远来看,电动汽车的单踏板控制仍然是一个过渡方案,从三踏板(油门、刹车、离合)到双踏板(油门、刹车),再到单踏板(油门刹车合二为一),直到全自动驾驶的无踏板、无方向盘,将随着科技进步不断演进。如2021-07-17,百度无人驾驶网约车在广州黄埔区正式面向公众全面开放,使广州成为百度无人驾驶网约车在中国的第4个试运营城市,并计划在未来3年内陆续扩展到30个城市,为共享出行提供应用典范。可以预见,在智能技术加持下,汽车进化之路将不断加速。
4 结论
电动汽车的单踏板模式将加速和制动合成在1个踏板上,提高了操作便利性,是汽车动力控制的发展方向,但现有的单踏板动力控制方案存在不足,即控制逻辑不完整,还必须保留刹车踏板,同时在紧急情况下由于切换失误,容易导致“油门当刹车”的安全问题。
对现有的电动汽车单踏板模式稍加改进,将刹车踏板改造为单踏板,踩下为刹车,抬起为加速,可在单踏板上实现加速和刹车的完整逻辑,另外还可杜绝误踩踏板导致加速的可能性,达到既操作简便又安全可靠的目的。
实用的单踏板操作模式是从人工到自动的汽车驾驶方式转变的合理过渡,必将加速推进汽车交通的进化之路,使人们出行更加清洁低碳、安全便捷。
