空调系统的改进型多变量内模解耦控制
2022-04-11朱其新
董 明,朱其新
(1.苏州科技大学 环境科学与工程学院,江苏 苏州 215009;2.苏州科技大学 机械工程学院,江苏 苏州 215009;3.苏州科技大学 江苏省建筑智慧节能重点实验室,江苏 苏州 215009)
变风量空调系统由于其在控制效果以及节能方面的优越性,在实际应用中受到了广泛的关注。然而,变风量空调系统控制复杂,具有多变量、非线性和强耦合等特点,使之不能充分体现其出节能的优势。例如,当系统在运行时,空调系统中的温湿度耦合回路就会产生相互的干扰,导致系统的控制效果不佳。因此要充分体现变风量空调系统的优越性就需要在系统解耦上做进一步的研究[1]。
文献[2-4]针对变风量空调系统控制的耦合问题,采用前馈补偿解耦方法进行解耦,并结合先进的控制方法来达到更好的控制效果,但利用解耦矩阵达到效果时,存在的复杂矩阵运算可能导致控制器难以实现。还有一些学者在控制回路中加入智能算法,如文献[5]通过模糊神经网络解耦控制器来削弱温湿度之间的耦合效应,但是智能算法计算复杂,并且在实际运用中不一定能取得理想的控制效果。文献[6]提出一种解耦内模控制的新设计方法,通过引入补偿项实现解耦控制。但对于高阶系统,常规内模解耦控制以及传统的滤波器不能满足性能要求。文献[7]提出利用模型的线性部分来计算转换和建筑热模型的非线性部分的特定稀疏模式,以获取降阶模型。然而这种方法获取的降阶模型与原模型之间的匹配性并不高。文献[8,9]利用遗传算法对模型降阶,由于遗传算法存在容易过早收敛的局限性,导致群体失去多样性。内模控制器需要设计滤波器以保证控制器的实现,文献[10]使用一阶滤波器来设计控制器,然后参数化为常规的PID控制器。但是常规的一阶滤波器并不适用于高阶的复杂系统,控制效果也会下降。文献[11]引入一种改进的Butterworth滤波器来提高系统的闭环控制性能,但是将改进的Butterworth滤波器应用于复杂的对象模型,极大增加了计算的难度。
本文通过变风量空调系统温度控制和湿度控制的耦合数学模型,使用改进型多变量内模解耦控制策略进行控制器的设计、仿真和性能分析研究。首先采用免疫遗传算法对模型进行降阶处理,简化对象模型;然后利用改进型Butterworth滤波器的内模解耦控制实现空调系统温湿度解耦,以达到更好的控制效果。
1 多变量内模解耦控制
1.1 内模控制
内模控制(IMC)是由Carcia和Morari在1982年提出的一种先进控制方法。由于内模控制具有设计简单、跟踪调控性能好、能消除外部不可预测干扰能力强、鲁棒性强等特点,因此不仅可以作为研究预测控制模型的基础,还可以在实际的工业过程控制中应用。
图1为内模控制(IMC)的结构。其中GIMC(s)为内模控制器;Gp(s)为控制对象;Gm(s)是控制对象的模型;R、Y分别为系统设定值和输出值;H为模型输出值;D是干扰输入;E为控制系统输出与模型输出的误差;U是控制器的输出,即被控对象的输入信号。反馈回路用来修正参考模型与对象之间的误差。

图1 内模控制原理图
1.2 多变量内模解耦控制器设计
多变量内模解耦控制的设计思路是让控制器同时起到解耦控制器和内模控制器的作用,从而可以不用单独设计解耦器,使得设计方法更加简单并且易于实际应用。图2是内模控制等效的单位反馈控制结构的原理图。

图2 内模控制等效原理图
由图2可知,反馈控制器GC(s)的传递函数为

内模控制系统的闭环传递函数为

在标称情况下且没有外界干扰时

系统输入R(s)与输出Y(s)间的闭环传递函数H(s)矩阵为

由此可知,要实现输入输出的解耦,就要将系统从输入到输出的闭环传递函数矩阵Gm(s)GIMC(s)设计为对角形式,就可以实现输入到输出一一对应的关系。
多变量内模控制器设计方法与单变量内模控制设计方法一致,使用最常用的零极点相消法设计内模控制器,设

其中,Gm(s)=Gm+(s)Gm-(s),Gm-(s)为Gm(s)中最小相位部分,即稳定且不包含预测项;Gm+(s)为Gm(s)中所有的右半平面零点和所有时滞项,本文对象不存在右半平面零点;F(s)为滤波器,以避免控制器出现不能物理实现。
根据求逆公式可得

其中,adjGm(s)是Gm(s)的伴随矩阵,detGm(s)是Gm(s)的行列式。
传统的内模控制器设计中一般采用形式较为简单的低通滤波器:

该低通滤波器只有一个可调参数λ,这就使得控制器在灵活性和控制效果上很难得到保证。虽然一阶滤波器(n=1时)在反馈滤波器中效果最好,但是阶次的上升会导致控制效果的下降,且一阶滤波器不能使高阶系统的传递函数正则。基于此本文内模解耦控制器使用改进型Butterworth滤波器。
1.3 改进型Butterworth滤波器设计
标准型Butterworth滤波器是具有最大平坦幅度响应的全极点均匀配置的一种低通滤波器,但是标准型Butterworth滤波器在n增大时,极点会越来越靠近虚轴,从而使系统越不稳定。针对这个问题,采用改进Butterworth滤波器,将虚轴与最近的极点的夹角控制在(0,π/2)范围内变化,其他极点均匀分布在左侧圆弧上,每两个相邻极点的相位差是(180°-2θ)/(n-1)。通过极点分布的位置可以得到改进型Butterworth传递函数[12-14]为
图3为改进型Butterworth滤波器的极点分布图。改进型滤波器包含3个可调参数:阶次n、截止频率wc和夹角θ。当夹角θ、截止频率wc不变,滤波器的阶次n变大时,系统响应速度变慢,上升时间长,但超调量减小,系统更加稳定。当阶次n、截止频率wc不变,夹角θ变大时,振荡频率wd=wccosθ增大,阻尼比ξ=cos(90-θ)减小,上升时间变短,超调量变大。因此在进行参数调整时,要同时考虑到系统的快速性以及稳定性。
由上可得,内模控制器的传递函数为

式中,f*为改进型Butterworth滤波器的传递函数。
2 基于免疫遗传算法参数优化
2.1 遗传算法
遗传算法(Genetic Algorithm,GA)是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,是一种模拟自然进化过程寻找最优解的方法。遗传算法中的目标函数可以是不连续的,离散的,这使得遗传算法在处理实际问题时更加实用,且适用范围更加广泛[15-16]。但是遗传算法作为一种优化方法也存在容易过早收敛的局限性。在遗传算法运行的过程中,种群中适应值较大的个体的数量会逐渐增加,随着算法的运行,适应值较大的个体会越来越多,使得整个群体失去多样性,也就是所谓的“早熟”现象。
2.2 免疫遗传算法
为了改变遗传算法“早熟”的现象,采用免疫算法与遗传算法结合,组成免疫遗传算法(Immune Genetic Algorithm,IGA)。免疫遗传算法是基于生物免疫机制提出的一种改进遗传算法,作为一种仿生自寻优随机算法,具有并行计算、全局收敛等特点。与普通的遗传算法相比,免疫遗传算法具有免疫记忆功能,可以加快搜索速度,提高总体搜索能力,避免陷入局部解[17]。
免疫遗传算法是模仿生物体免疫系统抵抗病菌的机制运行的[18]。该方法包含以下步骤:抗原识别,初始种群生成,计算个体适应度,抗体的交叉变异,抗体亲和力计算,种群更新,记忆单元的产生等。其中,将需要优化的目标函数们和约束条件视为抗原,相应的解集视为抗体,目标函数与解之间的匹配程度对应于抗原与抗体之间的适应值,每对解之间的相似性对应于每对抗体之间的浓度。IGA的计算过程的流程见图4。

图4 免疫遗传算法流程图
免疫遗传算法参数优化步骤:
(1)参数编码:随机产生初始抗体,采用实数编码对初始抗体进行编码,因为实数编码相较于二进制编码运行效率更高且不会导致搜索空间扩大。
(2)计算适应度函数:同时考虑将时域和频域性能指标来进一步提高模型拟合程度。时域指标:本文采用的时域指标为误差平方积分(ISE),即

式中,y(t)为原系统模型的时间输出响应,y~(t)为近似模型的时间输出响应。
频域指标:

式中,w为采样频率,N是迭代次数;G(jw)为原系统模型的频域输出响应为近似模型的频域输出响应,∠G(jw)为原系统模型的相角为近似模型的相角。α、β为设定的权重,满足α+β=1。
时域性能指标和频域能量指标同样重要,因此时域和频域能量指标的权重相等。因此,本文的适应度函数设计如下

(3)演变记忆细胞:抗体细胞适应值高的通过记忆功能保留下来,计算每一个体适应度函数值,确定种群最优适应度值,若搜索的适应度值小于最优适应度值,则免疫记忆开始重新搜索最优值;否则将当前群体中适应值高的个体加入记忆细胞中。
(4)维持多样性:计算当前适应值相近的个体浓度(即相近个体数与群体总数的比值),浓度高,则减小该个体的选择概率(抑制);反之,则增加该个体的选择概率(促进),以此保持群体的多样性。

式中:α、β为区间[0,1]中的随机数;Fi(i)为个体适应度值;C为抗体浓度。
(5)交叉和变异操作
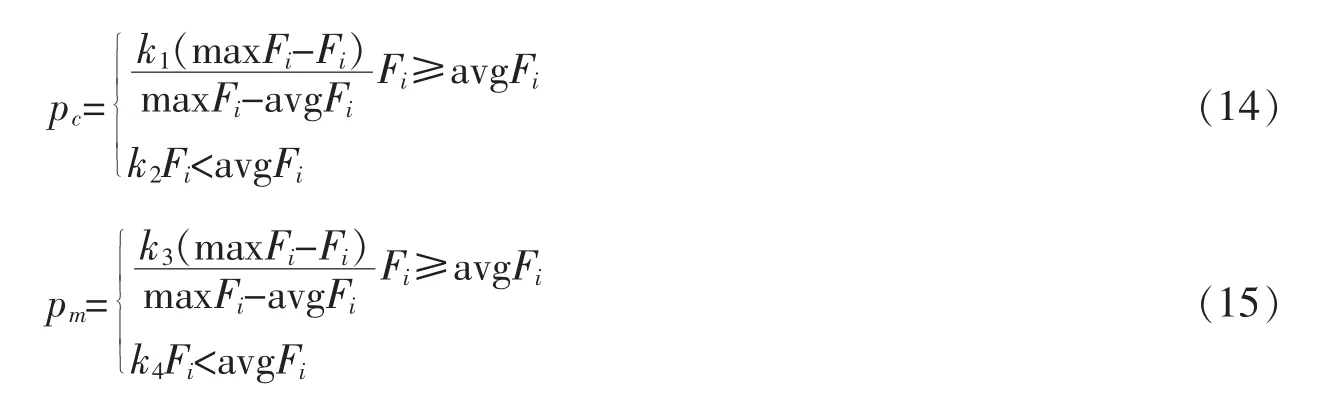
式中,pc、pm分别表示交叉概率和变异概率,k是根据经验给定的参数,k1,k2一般在[0.5,1]之间取值,k3,k4一般在[0.1,0.5]之间取值;maxFi为最大适应值,avgFi为平均适应值,Fi为种群中任何一个抗体或抗原的适应值。
(6)算法终止
对产生的新一代群体重新进行评价、选择、交叉和变异等操作,如此循环往复,使群体中最优个体的适应值和平均适应值不断提高,直至最优个体的适应值达到规定数值,或最优个体的适应值和群体的平均适应值不再提高,则迭代过程收敛,算法结束。
根据文献[19]得到空调系统温湿度传递函数矩阵为

经免疫遗传算法优化模型参数后得到降阶后的一阶模型为

为了验证免疫遗传算法降阶的有效性,通过Simulink平台设置对比实验进行仿真验证。单位阶跃信号下原始模型与基于免疫遗传算法的近似模型的输出曲线的对比如图5所示,从图中可以看出原始模型与降阶模型可以很好的匹配,故可以用降阶模型代替原始模型。
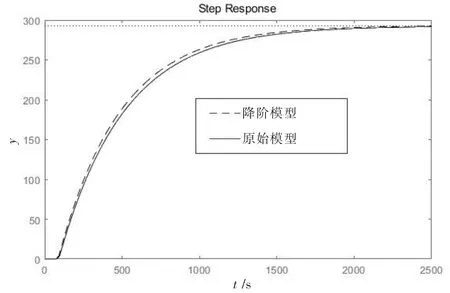
图5 原始模型与降阶近似模型的响应曲线
3 仿真研究
根据式(6)和式(9),得到内模控制器的传递函数为

考虑到系统的快速性与稳定性,将改进型Butterworth滤波器阶次n=4,滤波器的时间常数λ0=1/ωc=2,最靠近虚轴的极点所在半径与虚轴之间的夹角θ=60°。由式(8)可得

为了验证本文解耦策略的有效性,采用MATLAB对其进行仿真。文中以夏季工况为例,设定房间温度为23℃,相对湿度为60%。仿真结果如图6和图7所示,空调系统的室内温度和相对湿度之间的强耦合现象能够有效地实现解耦,室内温度在350 s时可以达到稳定,相对湿度在200 s时达到稳定状态。由于空调系统存在很多外部的干扰,会使室内温湿度发生变化,为此在温湿度控制回路的600 s处分别加入2℃和10%的扰动,模拟室内人员流动以及设备开启引起的负荷变化。在加入扰动后,温度回路可以在150 s内达到设定值,相对湿度回路也可以在120 s内达到稳定。因此当存在外部扰动是系统也可以迅速应对并达到设定值。
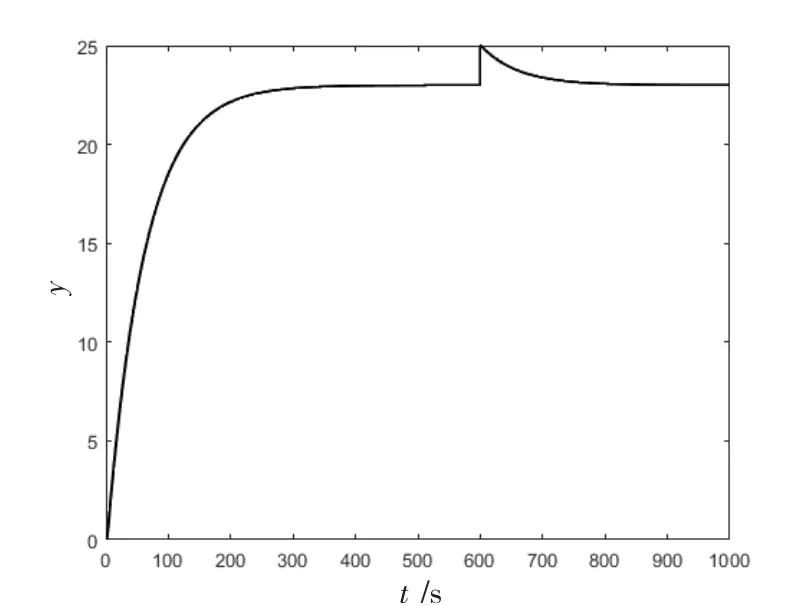
图6 室内温度控制回路

图7 相对湿度控制回路
另外,为了验证基于免疫遗传算法模型降阶的多变量内模解耦控制的有效性,将本文的解耦控制器与传统PID控制器进行对比仿真验证,室内温度和相对湿度控制回路的控制效果如图8和图9所示,并对仿真结果的性能指标进行对比,如表1所列。
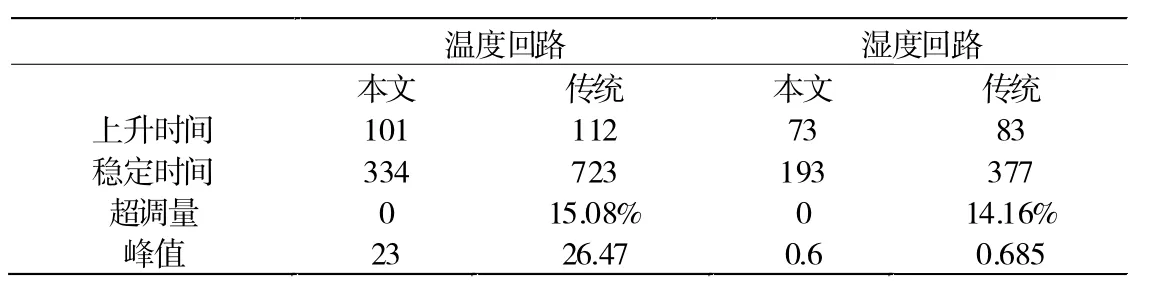
表1 两种控制的性能指标对比

图8 室内温度控制回路对比

图9 相对湿度控制回路对比
从仿真结果以及控制性能指标可以看出,本文的控制方法的上升时间都低于传统的PID控制,温度、湿度控制回路达到稳定的时间都有很大程度的提升,并且本文的控制方法没有超调,而传统的PID控制温湿度控制回路都有超过14%的超调量。
综上所述,基于免疫遗传算法模型降阶的内模解耦控制的温湿度解耦效果明显优于传统的PID控制,而且文中使用的基于改进Butterworth滤波器的内模控制器在调节时间和超调量等控制效果上也都优于传统PID控制器。
4 结语
变风量空调系统因其巨大的节能潜力,越来越多地应用在各种大型智能建筑中,但是系统中温湿度的耦合性是影响其控制效果的重要因素。因此,本文提出了一种改进型多变量解耦内模控制,将改进型Butterworth滤波器应用在多变量内模解耦控制器中。此外,利用免疫遗传算法降低模型的阶数,使得改进滤波器的内模解耦控制更易于计算和实现。仿真结果表明,采用免疫遗传算法和改进型Butterworth滤波器可以很好地实现变风量空调系统的温度和湿度解耦。与传统PID控制相比,它在响应时间、超调量和抗干扰能力等方面具有明显的优势。然而,空调系统中存在着许多高阶系统,这些复杂的空调系统将是未来研究的重点。
