深圳地铁2号线列车自主化牵引系统在列车自动运行模式下冲标问题分析
2022-04-11曾凡飞张佳波刘天宇张新宇
曾凡飞 张佳波 刘天宇 张新宇 邸 峰
(中车青岛四方车辆研究所有限公司, 266111, 青岛∥第一作者, 高级工程师)
深圳地铁2号线(以下简称“2号线”)全长35.7 km,共设29座车站,车辆为A型车,采用4动2拖的6节编组形式。列车在正线运营时采用ATO(列车自动运行)模式,由信号系统全程控制列车的起动加速、惰行及制动停车,在不触发ATP(列车自动防护)紧急制动功能的前提下,可实现精确对标停车[1-2]。
2号线车辆的牵引设备除T 240车采用自主化牵引系统外,其他车辆均采用庞巴迪牵引系统,所有车辆的网络及制动系统保持一致。T 240车从2017年载客运营以来, ATO模式对标正常,鲜有冲标或欠标的情况发生。但在2020年4月信号厂家更新程序后,T 240车第1次上线载客运营就在海上世界站、侨乡站、东角头站等车站发生冲标现象,且冲标距离均超过50 cm,导致站台门、车门均未能及时打开。但是,经过同样信号厂家更新后的庞巴迪牵引系统车辆并未发生冲标现象。经了解,在此次信号更新前,个别车辆偶尔出现过冲标、欠标现象,针对此情况,信号厂家对相关控制参数进行了试验并优化,但全程试验采用装有庞巴迪牵引系统的车辆进行,所有与车辆相关的控制参数都是基于庞巴迪牵引系统特性确定。车辆的网络及制动系统在此期间均未升级,因此,初步判定车辆冲标是由于不同制造商生产的牵引系统在性能上有所差异导致。
本文以T 240车冲标为实例,分析了ATO对标停车的基本原理,重点对牵引系统可能引起对标不准的原因进行了深入剖析,并提出相应的整改措施。
1 ATO对标停车的基本原理
图1为ATO模式控制模型示意图。ATO系统根据反馈得到的车辆实际速度、实际减速度及车辆所处位置等信息,将计算出不同级位的制动指令通过网络传输给车辆。车辆根据制动指令值,计算出此时所需的总制动力,由电制动或空气制动执行总制动力,从而实现对车辆的减速控制。
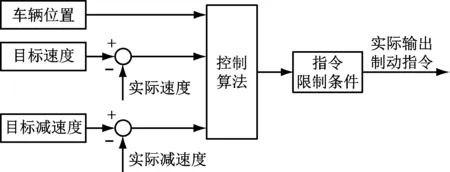
图1 ATO模式控制模型示意图Fig.1 Schematic diagram of ATO mode control model
ATO会针对每个站点设置1条列车运行控制曲线。在理想情况下,车辆的实际速度完全跟随设置的目标参考速度。为了实现此目标,通常信号系统在建立ATO控制模型时,将整个过程分为参考速度控制、减速度控制、牵引指令和制动指令计算3个部分[2-3]。其中:参考速度控制指通过设置车辆目标速度,并与车辆实际速度进行对比,控制两者间的差值,从而使得车辆实际的运行状态可以跟随上目标速度;减速度控制的目的是通过闭环控制去校正因线路坡度、运行阻力、车辆对指令的响应速度及制动性能差异等因素引起的车辆目标减速度与实际减速度偏差;牵引指令和制动指令计算指在指令最终输出前,综合考虑车辆冲击率限制及牵引、制动模式转换次数等实际的运用需求,计算生成可用且满足运营要求的车辆控制指令。
2 列车在ATO模式下冲标的可能原因
2.1 响应不及时
ATO模式下,信号系统为施令者,车辆的牵引、制动系统为命令的最终执行者。在进行模式转换、需求减速度变换时,信号系统需将相关信息发送给网络,网络再发送给车辆的牵引系统。牵引系统接收到信息后,按照冲击率限制输出电制动力。由于各系统间的传输延时及各系统的执行周期延时,导致信号需求与车辆实际输出存在一定的响应延时。为此,信号系统的ATO列车控制模型中设置了估算车辆减速度a2,用于闭环控制。将a2滞后于需求减速度a1的时间设为Td,Td根据信号系统与车辆匹配试验确定,如图2所示。
当车辆实际减速度响应延时小于Td时,信号系统认为车辆已跟随上需求减速度,不需要调节;反之,则认为车辆并未达到需求减速度,需要对需求减速度进行调节。若停车距离长,在经过几个调节周期后,实际减速度可逐渐跟随上估算减速度,此时可较准确对标。但当停车距离不够长时,实际减速度在未跟随上估算减速度时就已到达停车区域,此种情况极易引起对标不准,如图3所示。
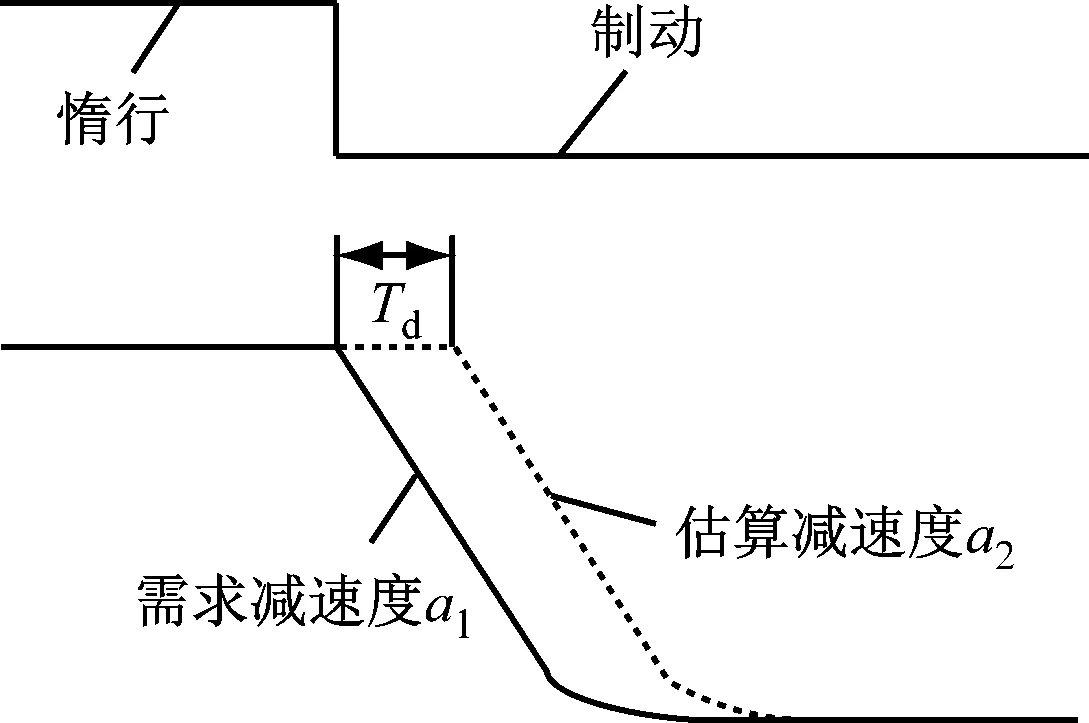
图2 信号系统估算车辆减速度示意图Fig.2 Schematic diagram of vehicle deceleration estimated by signaling system
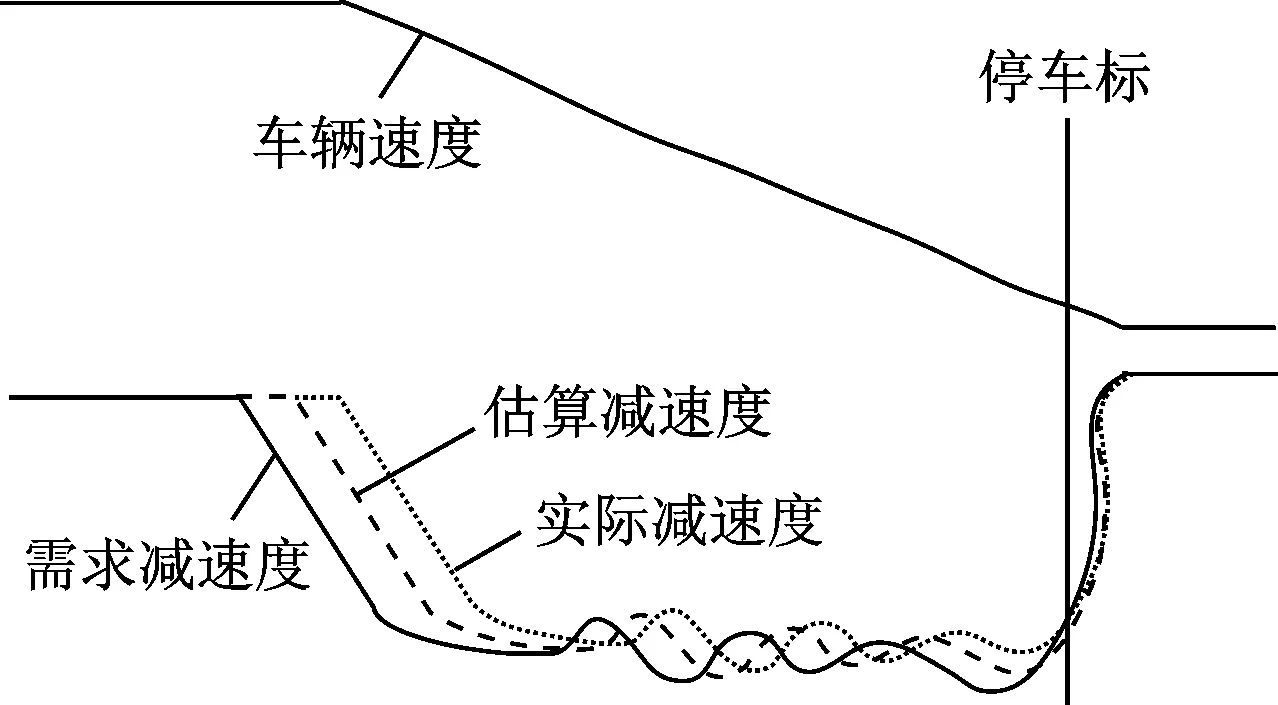
图3 实际减速度响应滞后引起冲标示意图Fig.3 Schematic diagram of stop mark exceeding caused by actual deceleration response delay
2.2 减速度不匹配
由于电流采集、转速采集及系统控制等误差,牵引系统实际输出的电制动力与理论值间会存在一定偏差,电制动力的不一致最终将反应到车辆减速上。另外,车辆的轮径差也会引起电制动力偏差。整车的电制动力与电机转矩、轮径的关系如下:
Fa=2nkTm/(DηB)
(1)
式中:
Fa——整车电制动力;
n——整车牵引电机个数;
k——齿轮传动比;
Tm——电机输出转矩;
D——车轮直径;
ηB——制动工况齿轮传动效率。
车辆的长时间运营会导致各个轴轮径值存在一定的差异,但只要轮径值在合理范围之内,通过实际轮径值调节电机输出转矩,则可使得整车电制动力在不同轮径下保持一致。然而,轮径值计算通常由参考轮径、参考速度及自身电机转速等参数校验得到,参考轮径输入错误或校验出错均会引起校验轮径值偏离实际值,进而导致输出的电制动力不准确。
在同一需求下,由于空气制动力与电制动力存在差异性,在部分牵引逆变器被切除的情况下,整个制动过程由电制动、空气制动两者混合进行制动,此种情况也会导致车辆减速度与理论值不能完全匹配[4]。
以上几种情况都可能引起制动减速度偏差。当该偏差大于信号系统允许的最大偏差时,信号系统即使持续采取调节措施,也会引起车辆冲标,如图4所示。

图4 减速度偏差引起冲标示意图Fig.4 Schematic diagram of stop mark exceeding caused by deceleration deviation
2.3 车辆滑行
雨、雪、霜、雾、落叶等外界条件均会使轮轨间的可用黏着降低。当输出制动力大于最大可用黏着力时,车辆将发生滑行。为防止滑行进一步加深,需快速降低制动力,以恢复黏着[5]。与制动系统相比,牵引系统检测更为灵敏、动作更迅速。通常在黏着降低时,牵引系统比制动系统更先检测到车辆的滑行状态并进行调节,同时发送滑行标志位给制动系统,防止制动系统因电制动力不足而进行空补。当滑行标志位时间超过3~5 s时,空气制动切除电制动进行停车。这样做的目的在于在空气制动模式下所有轴均可施加制动力,而电制动只能在动轴上施加制动力,车辆要得到同样的减速度,空气制动较电制动黏着需求更小。在相同的黏着条件下空气制动距离更短,制动更安全。
但在ATO模式下,信号系统并不知道轨面的具体情况。即使轨面条件恶劣,信号系统依然按照正常模式进行制动停车,在预留制动距离不足时也会引起冲标现象,如图5所示。
2.4 低速停车过程中电制动和空气制动间的配合不平滑
异步牵引电机由于转差率的存在及低速转矩的控制精度问题,在低速停车过程中需电制动和空气制动互相配合(以下简称“电空配合”)。当车辆速度减小到一定值时,网络或牵引系统将发送电制动衰退指令。由于牵引系统较制动系统响应快,牵引系统在得到电制动衰退信号后延时几百毫秒后(具体延时时间由试验效果确定)退出,空气制动接收到衰退信号后立刻按照固定斜率增加制动力。

图5 因车辆滑行引起冲标示意图Fig.5 Schematic diagram of stop mark exceeding caused by vehicle sliding
理论上在电空配合的整个过程中,整车制动力(电制动力加空气制动力)保持不变。但延时时间设置不恰当、制动力上升/下降的斜率不一致,以及空气制动力与电制动力的差异性,都可能使得整车制动力在电空配合过程中产生波动。车辆实际减速度随之发生波动,当波动范围大于信号系统允许限值时,认为此时车辆减速度大于需求值,进而采取减小制动需求的调节措施也会引起对标不准,如图6所示。

图6 低速电空配合引起冲标示意图Fig.6 Schematic diagram of stop mark exceeding caused by electro-pneumatic braking at low speed
3 案例列车冲标的原因分析及整改措施
根据以上牵引系统引起冲标的几个原因,逐条对案例车辆进行查找分析。查看当天冲标时刻网络数据,T 240车并未发生滑行,首先排除因滑行引起冲标;各轴轮径校验值与实际测量值间的差异小于1 mm,在合理范围之内;而且,牵引电机组合试验时所有速度点转矩波动范围均在±5%以内,亦满足要求。如图7所示,以2号线的海上世界站为例,分析信号冲标站点的停车数据。低速电空配合下车辆减速度波动较小,满足需求,但在惰行转制动时,车辆实际减速度滞后于信号估算减速度,响应不及时,信号随即进行大幅度调节。

图7 T 240车在2号线海上世界站冲标的波形图Fig.7 Waveform diagram of train stop mark exceeding at Sea World Station of Metro Line 2
由图7可知,响应不及时是T 240车对标不准的关键问题。在信号程序升级时,依据庞巴迪牵引系统特性对延时时间及减速度偏差限值做了调整,调整后的要求更加精细、严苛。分析T 240车的自主化牵引程序,查找出响应不及时的原因为:①自主化牵引系统冲击率限制始终为0.75 m/s3,但信号在ATO模式下冲击率限制增大到0.90 m/s3;②自主化牵引系统回到惰行模式后电机不带励磁、封锁逆变器脉冲,当惰行转制动时,需重新励磁并增加制动力,由此导致响应速度较慢。
同时发现自主化牵引系统对电制动力进行了20个级位划分,若需求制动力在5%范围内变化,牵引系统不做响应。由于信号系统在ATO模式下为无级位调节,需求制动力在最大限制范围内均可能出现,实际减速度与需求减速度可能不匹配,因此级位划分也是引起冲标的一个原因。
针对自主化牵引系统在惰行转制动时响应速度问题,本文分别在带励磁与不带励磁两种工况下进行了对比试验,如图8所示。
由图8可知:与惰行带励磁工况下相比,惰行不带励磁工况下制动力上升阶段实际输出的制动力较小,车辆实际减速度响应较慢,从接收到制动信息到车辆开始真正减速,延时约为0.3 s。因此,针对此次信号升级后T 240车冲标采取的措施有:① 对自主化牵引系统进行程序升级,将ATO模式下冲击率限制增大到0.9 m/s3;② 车辆在惰行时牵引电机依然保持带励磁工况;③ 取消电制动力的级位划分。

a) 带励磁试验下的波形

b) 不带励磁试验下的波形图8 带励磁与不带励磁2种试验工况下牵引系统惰行 转制动的波形对比
4 试验验证
自主化牵引程序升级后,将T 240车在正线上进行了试验验证,本文选取之前发生冲标过的海上世界站,对整改后列车对标情况进行波形分析,如图9所示。由图9可知:T 240车在惰行转制动过程中,实际减速度与信号估算减速度几乎重合,响应

图9 整改后T 240车在2号线海上世界站的对标波形图
及时;实际减速度波动减小、跟随性良好;信号调节幅度较小;车辆运行平稳,对标准确。T 240车在空载试验及后续载客运营过程中,采用ATO模式对标,均满足停车精度±30 cm的要求。
5 结语
列车在ATO模式的对标涉及信号系统,以及车辆系统的网络、牵引、制动等多方面,与线路条件也存在一定的关系。任一系统出现问题,或系统之间的配合不恰当,均会引起对标不准的现象。此现象存在一定的随机性,通常只是在某个或几个车站出现,其原因较复杂。每条线路在运营过程中或多或少都遇到过该类问题,如想在前期设计阶段根本上解决该问题,难度较大。只能尽量将以往线路出现的问题进行总结,在线路开通前的试验阶段进行充分的匹配试验,以减少后期正式运营时列车冲标、欠标的发生。
本文以牵引系统为对象,对牵引系统可能引起对标不准的几个原因进行了深入剖析。针对案例列车冲标现象进行问题查找分析,并对解决措施进行了相关试验验证,对ATO模式下列车对标不准分析有一定的参考作用。
