有轨电车线路槽型轨自动清洁系统研究*
2022-04-11谢勇君林泽楠李海建李进桂黄衍铭黄晓杰
谢勇君 林泽楠,2 李海建,3 李进桂 黄衍铭 黄晓杰
(1. 暨南大学轨道交通研究院, 519070, 珠海; 2.华南理工大学自动化科学与工程学院, 510641, 广州; 3. 桂林电子科技大学机电工程学院, 541004, 桂林∥第一作者, 副教授)
0 引言
有轨电车的线路大多采用埋入式的槽型轨,轨道铺设于城市道路的中间或两旁,和沿线道路上的其他车辆共享路权[1]。由于有轨电车轨道凹槽的特殊结构,树叶、砂石、泥土等异物容易堆积粘附在槽型轨内部,甚至会对槽型轨造成腐蚀。
在国外,德国Zweiweg公司设计的轨道清洁车使用高压水装置对槽型轨内的异物进行清洁,但该产品设计距今较久,已无法满足有轨电车轨道的清洁要求。英国的JOHNSTON、美国的ELGIN等公司设计的清洁车能够对公路进行清洁作业,但并不是针对有轨电车的槽型轨道清洁而设计的,因此也无法满足有轨电车槽型轨的清洁要求。
在国内,目前针对有轨电车槽型轨内异物的处理目前仍以人工手动清洁为主,该方式耗时、耗力、效率低、扬尘污染较为严重,并不适合有轨电车可持续发展的要求。文献[2]设计了一种有轨电车槽型轨清洁装置,该装置可将槽型轨中污物松动,利用滚刷将污物扫起后经由吸尘器吸走。文献[3]设计了轨道专用的清理维护车,该清洁车可利用铲刀进行清污,但铲刀会对轨道面产生不可逆的机械性损伤。
利用高压水流对有轨电车槽型轨内粘附的垃圾进行冲洗,并利用负压装置吸走污水和异物,可达到较好的清洁效果,也可以避免与轨道槽直接接触,对其造成无法修复的磨损。文献[4-5]为了获得高压水射流对有轨电车槽型轨轨面的最佳清洗效果,利用计算流体动力学分析软件FLUENT,对水射流的清洗过程进行了模拟仿真,得出在指定的条件下射流的最佳靶距为10~15 cm、最佳入射角为25°的结论。文献[6]设计的槽型钢轨清洁车装满水后只能清洗6 km长度的轨道。文献[7]研制的轨道清洁车由多个系统组成,利用水流冲洗或负压对污物进行抽吸。上述利用高压水或负压对槽型轨的清洁方式是粗放型的清洁方式,即使部分轨道槽内并没有垃圾等异物,清洁车在工作过程中均使用水流来冲洗轨道,这样既造成了水资源的大量浪费,又使得清洁车的工作里程较短,需要不断补充清洁水源。
此外,目前关于轨道异物清洁的研究(包括轨面提取、轨道异物识别等)大多与工字轨相关,针对槽型轨内异物识别的相关研究较少。为解决现阶段国内有轨电车轨道清洁装备技术落后的现状,本文研发了一套适用于有轨电车槽型轨的自动清洁系统。
1 自动清洁系统设计方案
1.1 自动清洁系统的工作流程设计
本文研发的有轨电车槽型轨自动清洁系统在工作时首先打开清洁车上轨道槽吸口,吸走轨面上普通的灰尘、沙子,接着通过清洁车上的车载高速摄像头获取槽型轨道的实时图像。该系统的工作流程如图1所示,当槽型轨异物快速检测算法检测到槽型轨中有异物存在时,上位机和PLC(可编程逻辑控制器)将自动调用清洁车上的高压水流,配合吸口实现对异物的自动清理。
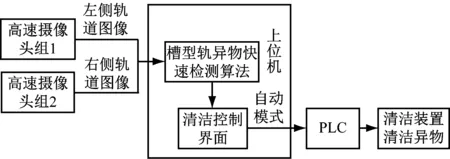
图1 有轨电车槽型轨自动清洁系统工作流程图Fig.1 Operation flow chart of the automatic cleaning system for the grooved track of tram
1.2 公铁两用槽型轨清洁车的总体结构
将该自动清洁系统应用于公铁两用槽型轨清洁车[8](以下简称“清洁车”),其总体结构如图2所示。
如图3所示,有轨电车大多采用埋入式槽型轨道[1],其特殊的结构增加了清洁车在快速移动下对异物的检测与清理的难度。为获得清洁车以20 km/h的速度行驶过程时槽型轨的图像,本文设计一款专用的高速摄像头夹具,以辅助固定高速摄像头。该夹具安装在清洁车底盘内(见图2的位置5),共有2个移动自由度和2个旋转自由度,可方便高速摄像头调焦,适用于各类清洁环境。夹头部分的橡胶垫可增大夹具与摄像头间的摩擦力,也能起到一定的缓冲减震作用,并有效减轻清洁车在工作过程中产生的摄像机抖动。

注:1——主车体; 2——前置低压降尘水路; 3——前置刷盘; 4——前变轨导向装置; 5——高速摄像头夹具; 6——低压隔膜水泵; 7——高压柱塞水泵; 8——洗车枪; 9——后变轨导向装置; 10——中间轨面负压吸口; 11——轨道槽清洗装置; 12——轨道槽吸口; 13——轨道槽高压水路; 14——污水箱; 15——液压泵与油箱; 16——风机; 17——柴油副发动机; 18——清水箱; 19——警报器。

图3 槽型轨道结构示意图Fig.3 Structure of the grooved track
1.3 槽型轨道异物快速检测算法
针对传统帧间差分法不能检测出完整目标、易产生空洞现象、对运动缓慢的物体不敏感等局限,为了匹配清洁车较快的行驶速度,本文提出了槽型轨异物的快速检测算法,其计算流程如图4所示。
1.3.1 步骤一:图像预处理
为降低车载左、右轨道摄像头采集得到的视频序列帧中背景光照、行车振动等因素的干扰,自动清洁系统用高斯滤波器和中值滤波器进行图像数据的平滑减噪,以减小高分辨率图像带来的图像噪声干扰。在此基础上进一步将视频帧数量减少至原始视频流的1/10,并转化为灰度图,以提高检测算法的处理速度。
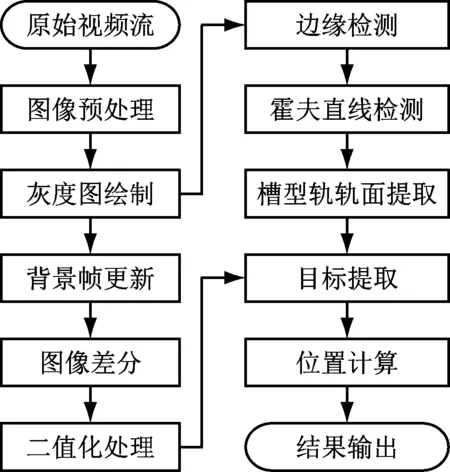
图4 槽型轨异物快速检测算法计算流程图Fig.4 Calculation flow chart of grooved track foreign object rapid detection algorithm
1.3.2 步骤二:提取槽型轨轨面
首先,使用Canny算法对灰度图进行轨道边缘检测,包括采用Sobel算子计算图像的梯度幅度和方向,对梯度幅度应用非极大值抑制来细化边缘,用双阈值算法检测和连接边缘以得到图像轮廓。接着,通过概率霍夫变换算法检测出图中存在的直线线段并进行筛选,最终分割出槽型轨轨面。
1.3.3 步骤三:异物检测
采用背景自动更新的背景差分法对槽型轨中的异物进行检测。根据式(1)计算差分图像,背景帧的更新策略如式(2)所示。
At(u,v)=|It(u,v)-Bt(u,v)|
(1)
(2)
式中:
At(u,v)——差分图像函数;
It(u,v)——当前帧图像函数;
Bt(u,v)——背景帧图像函数;
u、v——分别表示图像帧中水平方向、竖直方向的像素点;
t——图像帧序号;
α——图像帧的更新率。
试验表明,当α取0.2时考虑了像素点时空之间的关联性,能够有效检测出槽型轨的图像序列中变化不够明显的异物目标,并且可以防止运动中的目标突然消失。
1.3.4 步骤四:目标提取
设定二值化处理的阈值θ(θ=40),对差分图像进行二值化处理,得到的二值化图Tt(u,v)如式(3)所示,并与步骤二中提取出的槽型轨轨面进行相与运算,初步提取出槽型轨中异物的图像。为缓解空洞效应的影响,采用形态学滤波的方法对异物图像进行进一步的处理,以得到目标结果。
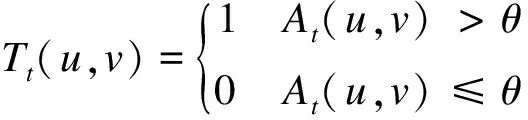
(3)
1.3.5 步骤五:计算异物位置
通过提取到的目标物体的中心距离计算出异物的质心在图像中的坐标,进一步结合清洁车的实际运行速度,计算出异物与轨道槽负压吸口及高压水喷嘴之间的实际距离。
通过上述5个步骤可实现槽型轨内异物实时位置的获取。当异物进入高压水喷嘴和轨道槽负压吸口清洁范围之内时,可对异物进行清洁。
1.4 清洁装置的自动控制
工控机对检测算法识别到的异物位置信息进行处理,向清洁车上的PLC发送控制信息,控制电磁离合器、电隔膜泵、电磁阀等工具调用清洁装置进行清洁作业。
清洁装置控制模块包括低压水降尘、高压水冲洗、负压吸污、扫盘洗刷等4个子系统,其中:低压水降尘子系统分为前置扫盘降尘水路、左右槽型轨间轨面降尘水路及污水箱内降尘水路,均由电隔膜水泵带动;高压水冲洗子系统由轨道槽冲洗水路、污水箱内清淤水路及高压水冲洗枪组成;负压吸污子系统中,风机负责抽吸左、右槽型轨之间的污水及轨道槽负压吸口处的污水;扫盘洗刷子系统中,液压马达负责控制扫盘装置,对左、右槽型轨之间的轨面进行清洁。
考虑高压水泵流量与轨道面清洗工况等因素,在保证最佳清污效果下最大化节约水资源,对高压水喷嘴、风机吸口进行设计[7],喷嘴出口水流速度的理论计算式如下:
(4)
式中:
p——喷嘴的入口压力;
v——水流速度;
λ——喷嘴出口水流速度系数。
如图5所示,利用FLUENT软件对水射流的清洗过程进行了模拟仿真,得出结论如下:在工作压力为6 MPa、喷嘴出口直径为1.6 mm时,设置靶距为10~15 cm,入射角为25°,高压水射流能达到最佳清污效果。

图5 高压水射流清洗仿真模型界面截图
工作人员可通过清洁车上面的物理控制面板或上位机软件界面上的按钮手动控制相关清洁装置工作,也可设置清洁车采用自动清洁模式,即检测到有异物时清洁车自行进行清洁。
在自动清洁模式下,轨道槽负压吸口下降至工作高度并打开风机,启动轨道槽吸口吸污。高速摄像头实时获取左、右槽型轨道的图像后,通过检测算法程序快速识别出槽型轨内有无异物,并对异物位置进行准确定位。若检测到轨道槽内有异物,自动清洁系统将关闭回水回路,打开高压水回路冲射轨道槽,污物将经由轨道槽吸口吸走;若没有检测到有异物,自动清洁系统将关闭高压水回路,不做清洁。自动清洁模式的工作流程如图6所示。
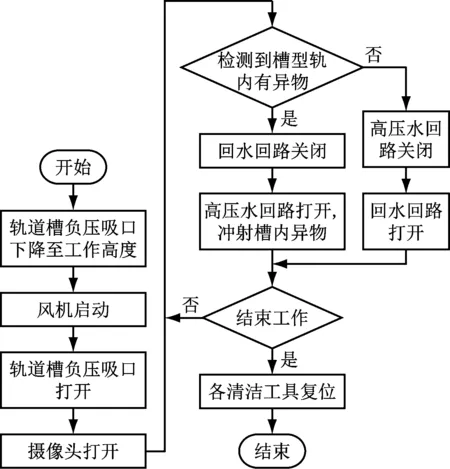
图6 自动清洁模式的工作流程图Fig.6 Operation flow chart of automatic cleaning mode
2 试验结果分析
本文通过清洁车对存在异物的槽型轨进行清洁试验,使用WP-UF500高速摄像头获取清洁车快速行驶过程中的轨面图像。从图7可以看出,本文提出的槽型轨异物快速检测算法能够检测出槽型轨道内的泥土、砂石、树叶等异物。经计算,本次试验目标检测的成功率超过92%,处理每帧图像的平均耗时为31.6 ms。由此可认为:本文提出的自动清洁系统具有较高的实时性和准确性,可满足清洁车20 km/h的清洁速度,远高于传统的人工清洁速度(4~5 km/h)。

a) 轨面上异物实图

b) 异物的检测效果图图7 采用自动清洁系统进行试验的检测效果Fig.7 Detection effect of adopting automatic cleaning system for tests
根据水射流仿真的结果调整轨道槽的清洗射流喷嘴,将射流靶距设为10 cm、入射角设为25°,清洁车在运行过程中对槽型轨进行清洁,达到了良好的清洁效果,如图8所示。

图8 槽型轨清洁后的实际效果Fig.8 Actual effect of grooved track after cleaning
3 结语
本文通过对有轨电车槽型轨自动清洁的关键技术进行研究,所提出的槽型轨异物快速检测算法能够准确地提取槽型轨的轨面图像,对槽内异物检测的成功率高、检测时间较短,能够满足清洁车以20 km/h速度行驶过程中获取异物位置并对其进行清洁的需求。自动清洁系统在有轨电车槽型轨中得以应用,既可提高槽型轨道内异物的清洁效率,又有利于降低腐蚀性垃圾对槽型轨的污染,减少导电物对有轨电车正常运行的影响,有助于推动有轨电车行业的发展。
本文克服了传统人工手持工具清洁槽型轨道效率低下、成本较高的不足,解决了普通清洁车工作时全程喷水冲洗槽型轨浪费大量水资源、清洁车因耗水严重导致清洁里程较短等问题。
经过多次的试验测试,该自动清洁系统的硬件和软件均能够协同稳定地工作,但轨道槽清洗装置还无法实现对道岔的全方位清洁,因此,进一步提高槽型轨中异物检测成功率及槽型轨道的清洁效率,将是有轨电车槽型轨自动清洁系统优化的重点。
