含弹性适配器的运载器式潜射导弹分离研究
2022-04-08薛瑞娟张凌雲乐贵高
刘 冰,刘 科,薛瑞娟,张凌雲,乐贵高
(1.南京理工大学 机械工程学院,南京 210094;2.中国船舶集团公司第七一三研究所,郑州 450000)
1 引言
在现代导弹潜射技术中,从弹体有无附加保护角度分类,可分为湿式发射和干式发射2种。干式发射借助专门的运载器包裹形式完成水下运动和出水跨介质运动;在水面附近导弹与运载器实现分离动作,导弹转入空中飞行弹道,完成整个导弹水下发射过程。运载器出水时介质由水变为空气,并受海洋中风浪的强烈干扰作用,在气液交界面处作用时间短、变化快、变化因素多,飞行器外部力学环境急剧变化,容易产生剧烈的振动与冲击,带来出水载荷的特性不明确和飞行稳定性问题。弹筒分离阶段虽然时间历程很短,却赋予了导弹空中飞行的初始条件,直接影响导弹空中弹道的启控条件和稳定性,对潜射导弹成功发射至关重要。导弹的弹射点位置不同会造成导弹发射过程中最终离开运载器的姿态产生差异。若运载器出水初始姿态角小于90°,受力形态一般是非对称的。这种非对称力可引起飞行器姿态偏离设计状态。若冲出水面的飞行器无法达到预定的姿态指标,即使点火仍将导致失稳和发射失败。所以深入开展浮动平台水面分离特性影响研究非常必要。
刘曜计算分析了艇速对潜射导弹水中运行弹道的影响,对导弹与运载器水面分离弹道也进行了数值计算研究,但是没有考虑波浪、潜流和阵风对分离运动的影响。彭正梁采用势流理论计算水动力,对高速航行体与运载器水面分离过程进行了二维弹道仿真,但是所做的二维仿真分析研究没有考虑到弹器分离过程中导弹姿态角的变化。段崇一等建立导弹水下发射二维流场网格模型,基于二维不可压N-S方程,对导弹出管过程中不同时刻弹体的压力载荷分布进行解算,但是采用二维的网格模型,难以完全考虑导弹所处的真实环境。李晶对水动力环境下的两刚体相对运动过程进行数值仿真,计算得出潜射导弹发射的速度和姿态角变化,但是没有考虑弹器分离过程中适配器对分离过程的影响,也没有在弹器分离模型施加波浪的作用。顾媛媛采用切片法分析水面分离时浮筒和航行器的受力情况,利用MATLAB建立了浮筒与航行器分离的仿真模型,计算得到航行器的姿态变化,但建立的弹器分离模型不能准确计算分离过程中浮筒与流体的相互耦合作用,也没有考虑水面波浪的影响。张红军等用Mixture等模型和动网格技术,对考虑潜艇平动影响的导弹冷弹射出筒过程进行了三维非定常数值模拟。陆辰昱使用VOF方法比较分析了横向流速和单一的倾斜角度对运载器式潜射导弹分离的影响,没有涉及不同的弹射时机和出水角度对运载器式潜射导弹分离特性的影响,也没有考虑到适配器对弹射分离的影响。目前,有关弹射点位置和波浪对运载器式潜射导弹水面弹道弹射分离影响的研究未见报道,而且更多仅局限于二维的分离运动,没有充分考虑导弹发射过程中姿态角的变化,未能考虑液体表面边界条件,用流动的任何区域气体和液体模糊的处理,给计算自由液面的运动特性带来较大误差,而且没有考虑到导弹与运载器分离过程中适配器对分离过程产生的影响,缺少弹器动态分离过程中适配器的相互作用模型。
本文建立高精度VOF模型和六自由度耦合运动模型,对运载器出水过程中不同弹射起始高度、不同出水角度下运载器式潜射导弹水面分离的质心位移,姿态角及轴向速度等进行了三维仿真分析。本文提出的仿真方法具有较高的精度,所形成的高精度数值仿真方法以及潜射导弹水面分离研究特性结果,对工程应用具有良好的参考价值。
2 分离过程及计算模型建立
运载器从水下发射到出筒过程主要包括:以水面平均高度作为基准水面高度,运载器在基准水面高度以下1.5 m开始运动,在水中依靠初速和浮力迅速上升,当运载器以一定速度冲出水面至一定高度,达到分离时机,头罩首先分离,导弹助推发动机点火工作产生推力,运载器受到同样大小的反向推力,导弹与运载器间的锁定销被推力剪断,导弹沿着运载器筒体快速滑行,适配器相继脱离,最后导弹离开运载器。建立固定坐标系,运载器固定坐标系,航行体固定坐标系,位于初始时刻运载器顶端中心,位于运载器质心,位于航行体质心。沿着运载器中心轴方向,沿着航行体中心轴方向。运载器动坐标系及导弹动坐标系与固定坐标系之间的欧拉角为滚转角,俯仰角,偏航角。水面分离示意图如图1。运载器式潜射导弹采用单筒单弹结构。运载器的直径为0.7 m,长度为6 m,材料密度为1 656.46 kg/m;导弹直径为0.375 m,长度为3.9 m,材料密度为1 179.69 kg/m,航行体质心与头部顶点距离2.56 m,运载器质心距头部顶点3.3 m,适配器刚度为700 kN/m,阻尼系数为200 N·s/m。

图1 水面分离示意图Fig.1 Diagram of water surface separation
为研究复杂海情对运载器动平台分离特性的影响,共设立4组计算工况,具体计算条件如表1所示,分别进行弹射起始高度、初始俯仰角对动平台分离特性影响研究。工况1弹射起始高度为运载器头部出水面2 m,工况3弹射起始高度为运载器头部出水面4 m,与工况2弹射起始高度为运载器头部出水面3 m进行对比;工况4的初始倾斜角度为10°,与工况2的初始倾斜角度为5°进行对比。
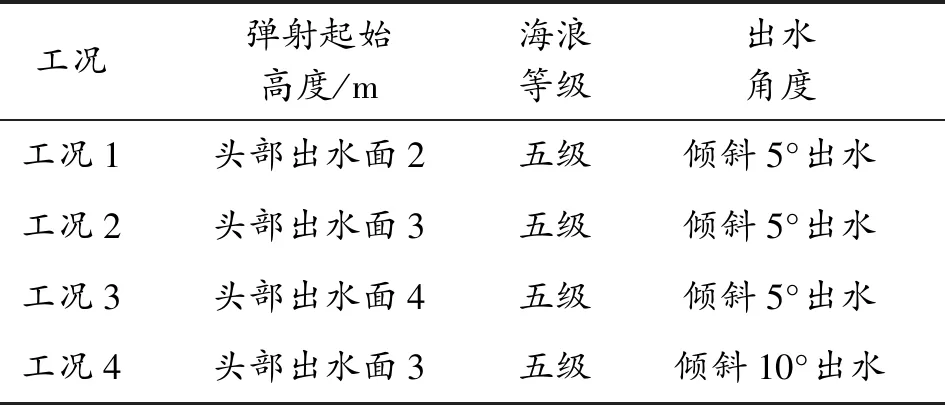
表1 计算工况Table 1 Computational conditions
3 数值模拟方法的建立
3.1 自由液面模型
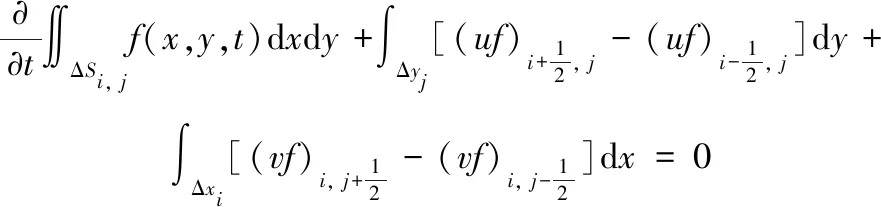
基于分数容积障碍网格法,建立笛卡尔坐标系下的三维不可压缩Navier-Stokes方程,形式如下:

(1)
式(1)中:是流体密度;是压力;,,是流体在时刻,在点(,,)处的速度矢量;是单位体积流体受的外力,若只考虑重力,则=;常数是运动粘度。
与标准-模型相比,RNG-湍流模型考虑了平均应变率的影响,能更好地处理高应变率及流线弯曲较大的流动,所以可以更精确地计算运载器出水过程波浪破碎的状况。RNG-模型的湍流产生项和耗散项分别表示为:
方程:

(2)
方程:

(3)
式(3)中:湍流黏性=RNG;模型常数RNG=0085,2RNG=168,RNG=RNG=0071 9。
3.2 VOF方法
对自由液面采用由Hirt提出的流体体积函数(VOF)进行求解。VOF方法利用计算网格单元中流体体积量的变化和网格单元本身体积的比值函数来确定自由面的位置和形状。若在某时刻网格单元中=1,则说明该单元全部为指定相流体所占据,为流体单元,若=0,则该单元全部为另一相流体所占据,相对于前相流体,则称为空单元;当0<<1时,则该单元为包含两相物质的交界面单元。采用VOF两相流计算模型,定义水为第一相、空气为第二相。在数学上通常假定任意函数(,),其定义为:

(4)
若不考虑剧烈的相变,根据连续性介质概念,函数随质点运动而保持不变,其随体导数为零,流体体积传输方程的形式为:

(5)
VOF方法的数值差分格式见式(6),在Δ,中对式(5)进行积分,其积分形式为:
(6)
3.3 FAVOR方法
FAVOR(fractional area/volume obstacle representation)网格处理技术能够在结构化的网格内定义独立复杂的几何体,即使模型很复杂也可以精确地描述外型,实现利用简单的矩形网格表示任意复杂的几何形状,避免了以往有限差分难以精确拟合物体边界的缺点。FAVOR方法可以计算网格表面的开放面积分数和开放体积分数,并基于这些参数重建几何结构。这种方法提供了简单而准确的方法,来表示域中的复杂曲面,而不需要贴体网格。
采用的FAVOR方法本质上是一种浸没边界方法,网格生成的工作量和难度远小于贴体网格方法,模型运动与背景网格无关,无论模型的运动幅度有多大,网格均无需划分。采用的FAVOR方法比ALE动网格方法更适用于求解大幅度运动的流固耦合问题,并且具有较高的精度。与传统的浸没边界法相比,FAVOR方法对边界的刻画精度更高,可用来精确模拟高雷诺条件的流动,在一定条件下弥补了贴体网格的不足。FAVOR方法能够准确计算界面面积,增强数值稳定性,计算沿固体边界的平流和应力,可以精确地计算得到固液交界面模型的相对运动。
3.4 六自由度运动模型
作用于高速航行体和运载器的外力和外力矩为和,则运动方程为:
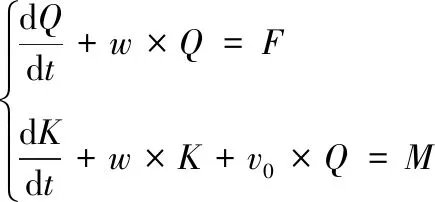
(7)
式(7)中:和分别为刚体的线动量和角动量;为旋转角速度;为线速度。
刚体运动的三维弹道方程组为:

(8)
式(8)中:、、分别表示运载器或航行体的角速度矢量在其动坐标系轴向上的分量;、、为流体附加质量,、为流体附加静矩,、、为流体附加转动惯量;右端项是作用在刚体上的合力与合力矩在各坐标轴上的分量。航行体受到的作用力包括:重力2,燃气发生器推力2,适配器约束内力2,下标为各道适配器的标号。运载器所受作用力包括:重力1,浮力1,流体惯性作用力1,流体粘性作用力1,适配器约束力1,燃气发生器反推力1,波浪扰动力1,流体惯性作用力项已包含在弹道方程的左端。
采用隐式数值算法计算物体运动并处理流体和运动物体之间的相互作用。潜射导弹密度比水更大,在与水面进行接触碰撞过程中产生很大的非线性力,附加质量也很大,采用隐式算法,计算运动的稳定性更好、收敛更快。动量对流采用显示的数值逼近算法,设置了最大时间步尺寸来维持数值稳定性,与隐式算法相比较具有更高的计算精度。
3.5 适配器作用力
在航行体发射出筒的过程中,适配器随着航行体一起向外移动,适配器的作用力可以分为阻尼力和弹性力。在航行体发射过程中,适配器的变形是非常微小的,认为适配器的变形在弹性范围之内,适配器的弹性力正比于变形量。阻尼力与适配器的阻尼系数和适配器节点的相对运动速度有关。
适配器作用力计算公式为:

(9)

3.6 计算边界条件
设置长12 m、宽7 m、高19.8 m的整体区域,液面在距网格区域底面高9.5 m处。采用六面体网格单元,使用包含2个网格块组合的嵌套网格,网格块1包含运载器及其周围流体区域,长3 m、宽2 m、高17.7 m,设置网格边长0.04 m,网格数量166.1万个,网格块2的范围占据整体计算区域,网格边长0.1 m,网格数量166.3万个,整体网格总数为332.4万个。在网格区域的左侧和右侧边界设置对称边界,前侧和后侧边界设置波浪来流和出流,下侧设置壁面边界,上侧设置压力出口边界。针对包含运载器及其周围流体区域的内侧网格块1进行网格无关性验证,网格无关性分析设置如表2所示,设置0.03 m、0.04 m、0.05 m等3种网格,得出3种网格工况初始倾斜角度为5°条件下筒弹分离时刻运载器的俯仰角,0.04 m网格尺寸与0.03 m工况运载器俯仰角比较接近并且网格数较少,所以选用0.04 m的网格尺寸,既能保证较高的计算精度而且计算工作量较小。边界条件类型如图2所示。网格无关性分析设置表如表2所示。
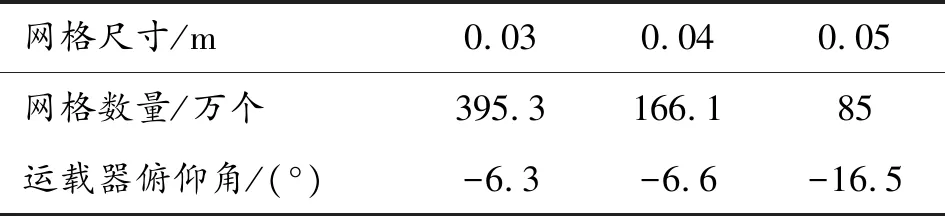
表2 网格无关性分析设置表Table 2 Grid independence analysis setting

图2 边界条件类型示意图Fig.2 Boundary condition type
3.7 模型验证
根据上述自由液面模型,对含旋转角速度的标准台球入水过程进行数值模拟,将数值结果与实验对比,验证数值方法精度和有效性。标准台球直径=0.057 2 m,质量170 g,初始入水速度为=5.45 m/s,并且以=199 rad/s的角速度旋转。图3给出了计算速度云图与实验高速摄影的对比。台球入水具有初始的旋转角速度,既包含平动也包含转动,可以说明6自由度模型的可靠性。
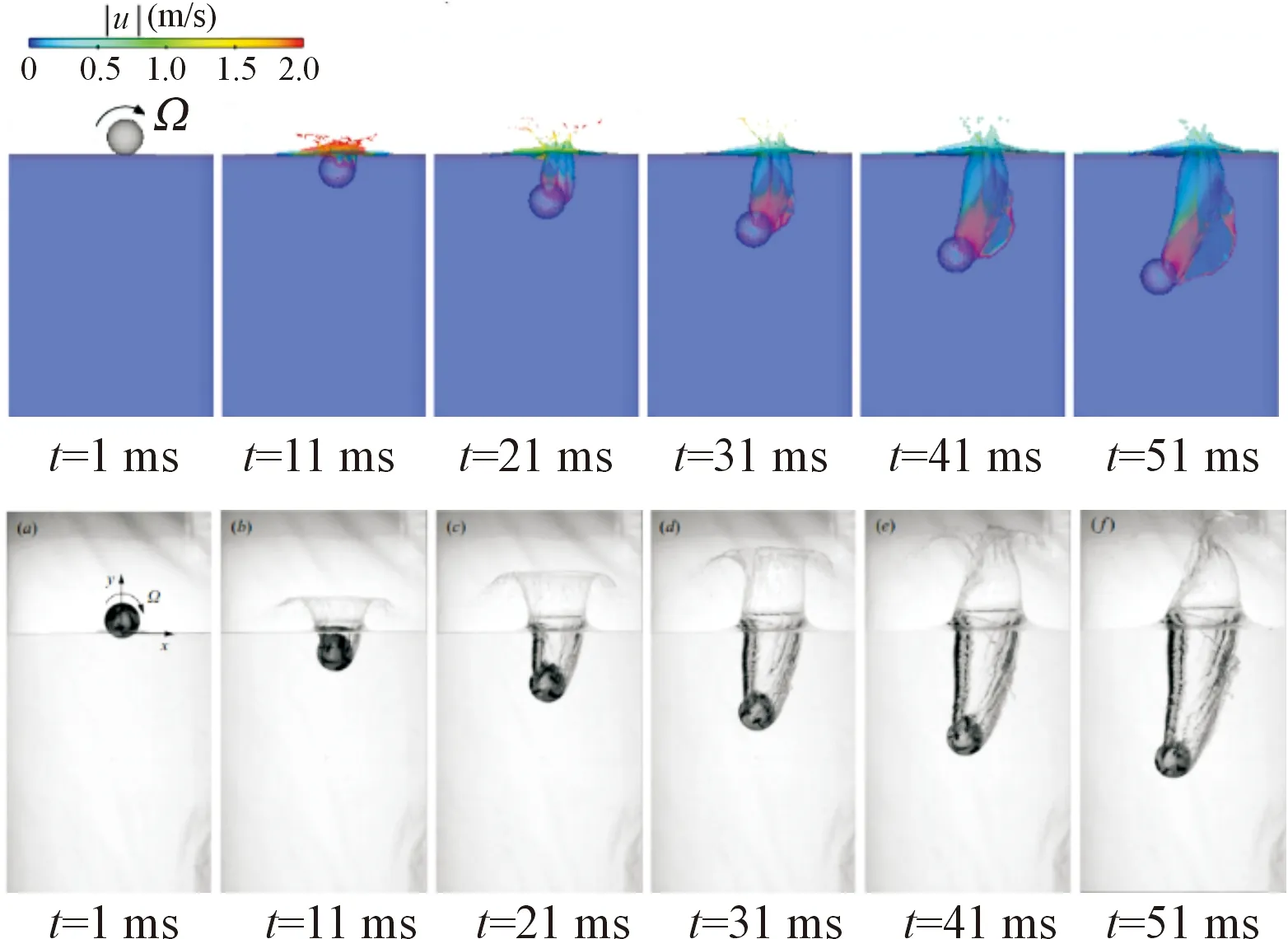
图3 速度场计算结果与实验高速摄影图像Fig.3 Calculated results of velocity magnitude and high-speed photographs
图4分别表示了台球入水过程中质心运动轨迹和竖直方向位移的计算值和试验值。由图4可以看出,质心运动轨迹和竖直方向位移的计算值与试验值较为吻合,所以仿真模型具有较高的精度。

图4 质心运动轨迹和竖直方向位移曲线Fig.4 Trajectory of mass center and vertical displacement
4 计算结果及分析
4.1 弹射起始高度对分离特性的影响研究
选取不同的弹射起始高度,开展跨介质运动仿真,并且考虑导弹发射过程中适配器运动过程,得出弹射起始高度对海面分离的影响规律。这里选取弹射起始高度为运载器的头部高出水面2 m、头部高出水面3 m和头部高出水面4 m,海浪的浪级都是5级,出水速度都是9 m/s,初始倾斜角度均为5°,且初始俯仰角速度也均为5°/s的3种不同工况(见图5),也就是工况1、工况2、工况3进行对比。得出3种发射状态下运载器和导弹在、、轴的坐标随时间的变化曲线。

图5 工况1(a),工况2(b),工况3(c)分离状态图像Fig.5 The image of separating state in working condition 1 (a),2 (b)and 3 (c)
质心位置
图6和图7表示运载器和导弹的位移沿轴、轴、轴的变化,给出了工况1、工况2、工况3的位移。
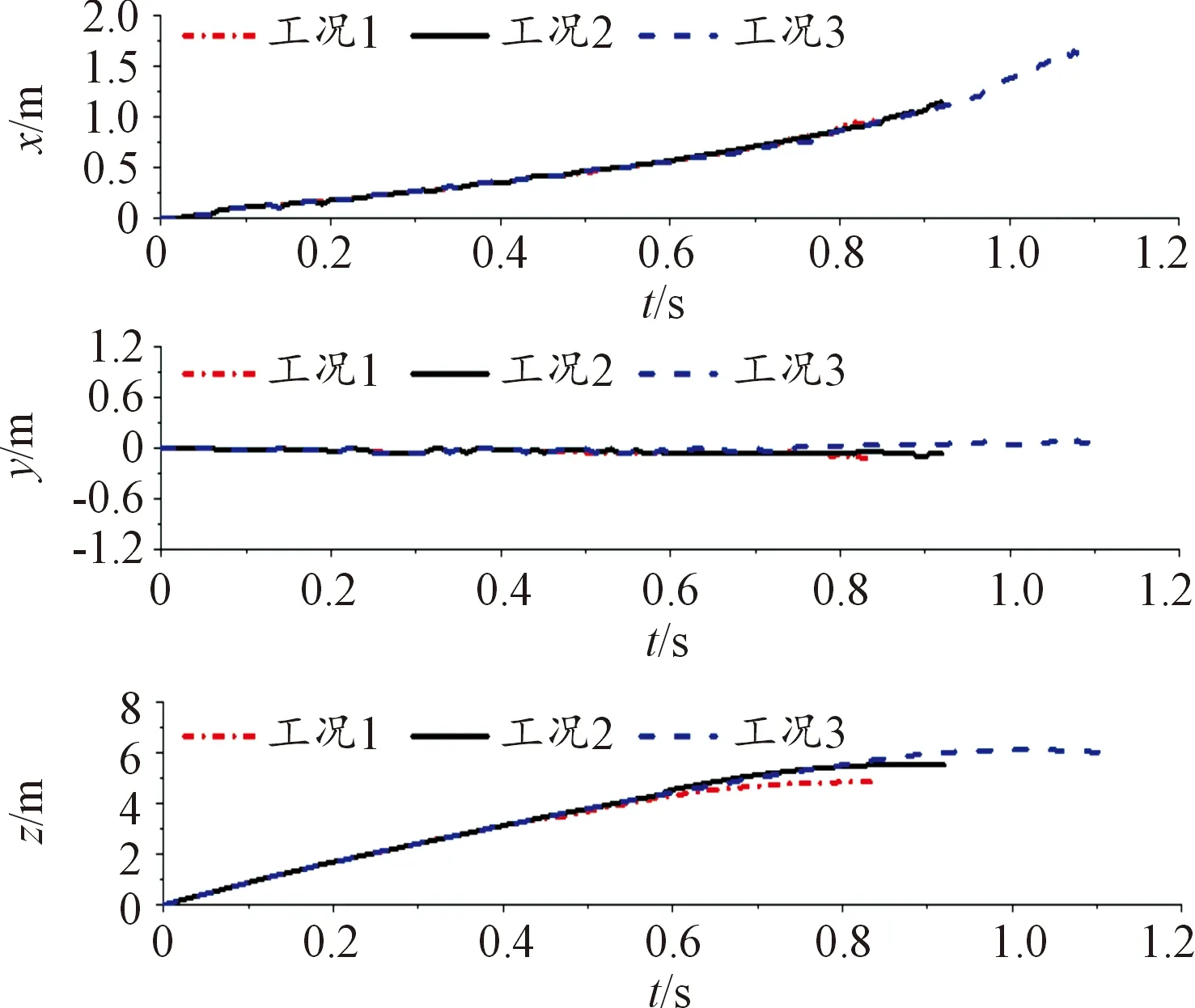
图6 工况1、工况2、工况3运载器位移曲线Fig.6 Displacement of launch tube in working condition 1,2 and 3
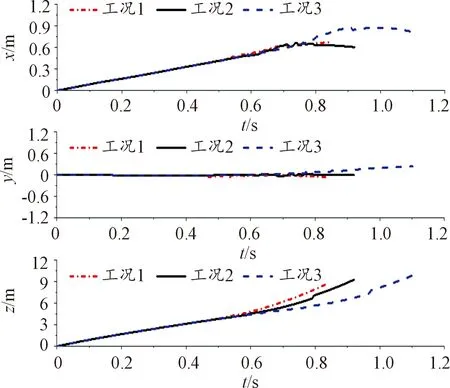
图7 工况1、工况2、工况3导弹位移曲线Fig.7 Displacement of missile in working condition 1,2 and 3
由图6、图7可知,工况3运载器在方向位移最大,工况1运载器在方向位移最小。工况3导弹在方向位移最大,工况1和工况2导弹在方向位移基本相同。这3种工况运载器和导弹在方向有轻微波动。工况3运载器在方向位移最大,工况1运载器在方向位移最小。而且3种工况运载器在发射过程中始终沿方向运动。工况3导弹在方向位移最大,工况1导弹在方向位移最小。
姿态角
图8和图9是出水过程运载器和导弹的姿态角曲线,给出了工况1、工况2、工况3的姿态角。
由图8、图9可知,在俯仰角、偏航角、滚转角这3个姿态角里,俯仰角和偏航角对导弹能否成功发射的决定性更大。3种工况运载器和导弹俯仰角都由5°逐渐减小,工况1运载器最后的俯仰角为-3°;工况2运载器最后的俯仰角为-66°;工况3运载器最后的俯仰角为-11°,表明工况3运载器的俯仰角的变化程度大于工况2,工况2运载器的俯仰角的变化程度大于工况1。3种工况导弹俯仰角由5°逐渐减小,工况1导弹最后的俯仰角为-33°;工况2导弹最后的俯仰角为-44°;工况3导弹最后的俯仰角为-89°,表明工况3导弹的俯仰角的变化程度大于工况2,工况2导弹的俯仰角的变化程度大于工况1。3种工况运载器和导弹偏航角波动范围不超过3°,表明这3种工况运载器和导弹偏航角的变化都比较小。3种工况运载器的滚转角从0°逐渐增大,工况3运载器的滚转角为254°,比工况1和工况2的滚转角更大,工况1和工况2的滚转角基本相同。工况3导弹的滚转角变化程度大于工况2,工况2的导弹滚转角变化程度大于工况1。工况3运载器和导弹姿态角变化幅度大于工况2,工况2运载器和导弹姿态角变化幅度大于工况1。弹射起始高度越高,运载器和导弹姿态角变化幅度越大。

图8 工况1、工况2、工况3运载器姿态角Fig.8 Attitude angles of launch tube in working condition 1,2 and 3
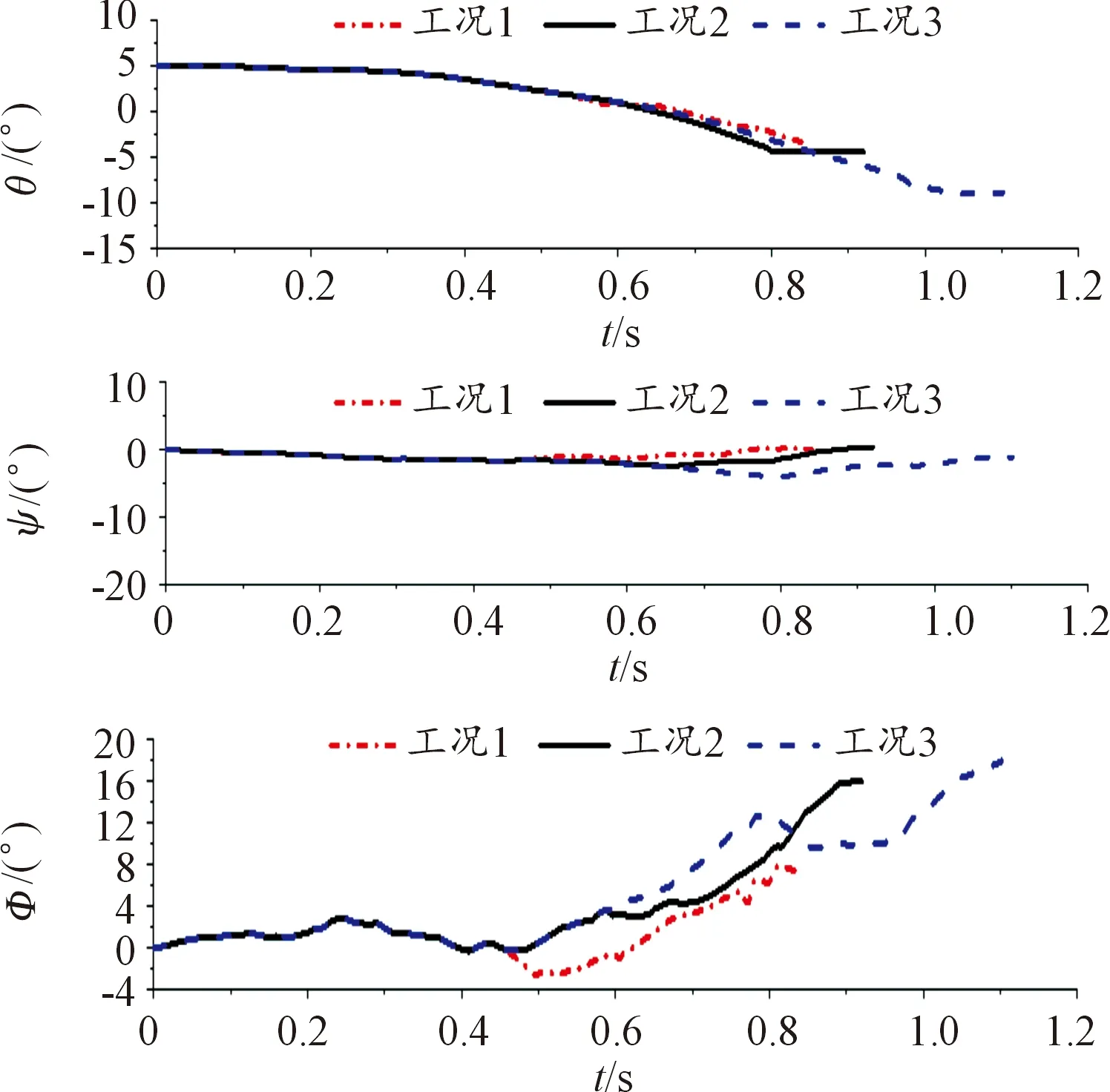
图9 工况1、工况2、工况3导弹姿态角Fig.9 Attitude angles of missile in working condition 1,2 and 3
轴向速度
图10表示出水过程运载器和导弹轴向速度,给出了工况1、工况2、工况3的轴向速度。
由图10可知,3种工况运载器的初始速度为9.5 m/s,从平均水面以下1.5 m开始运动,当运动到平均水面的出水速度为9 m/s。在整个发射过程中,运载器轴向速度逐渐减小。工况1运载器0.46 s开始受到弹射力的作用,工况2运载器0.59 s开始受到弹射力的作用,工况3运载器从0.77 s开始受到弹射力的作用,3种工况运载器轴向速度最后减小至-1.5 m/s。在整个发射过程中,3种工况导弹轴向速度先略微减小,在施加弹射力以后速度逐渐增大,并且最后增大到20 m/s左右满足出筒速度要求。3种工况施加弹射力以后导弹的加速度基本相同。

图10 工况1、工况2、工况3运载器和导弹轴向速度曲线Fig.10 Axial speed of launch tube and missilein working condition 1,2 and 3
4.2 动平台初始倾斜角度对分离特性的影响研究
选取典型的发射倾斜角度,此次研究针对出水姿态角接近垂直的运载器,因此分别选取初始倾斜角度为5°和10°的2种不同工况(见图11),也就是工况2和工况4进行对比,海浪的浪级都是5级,出水速度都是9 m/s,且初始俯仰角速度也均为5°/s,得出初始发射倾斜角度对分离特性的影响规律。
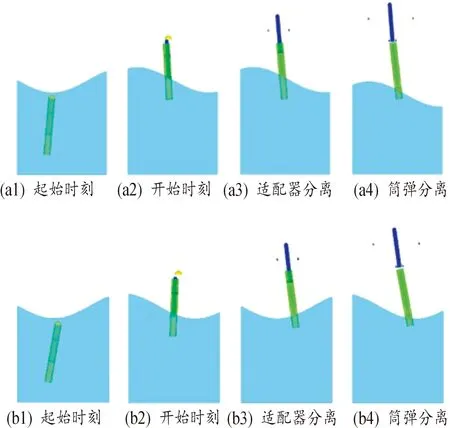
图11 工况2(a),工况4(b)分离状态图像Fig.11 The image of separating state in working condition 2 (a)and 4 (b)
质心位置
图12和图13分别表示运载器和导弹的位移沿轴、轴、轴的变化,给出了工况2和工况4的位移。
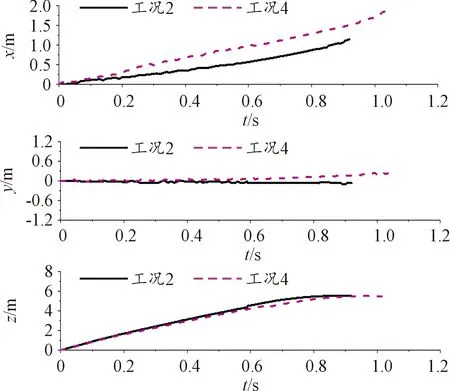
图12 工况2、工况4运载器位移曲线Fig.12 Displacement of launch tube in working condition 2 and 4
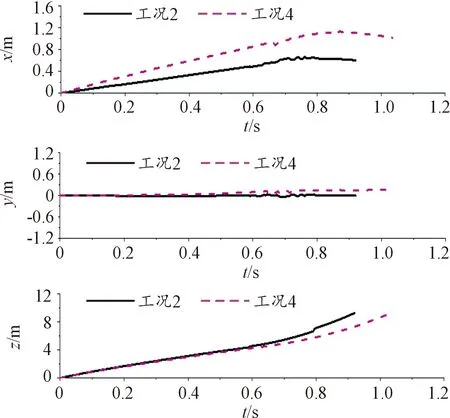
图13 工况2、工况4导弹位移曲线Fig.13 Displacement of missile in working condition 2 and 4
由图12、图13可知,工况4比工况2运载器在正方向有更大的位移,工况4比工况2导弹在正方向也有更大的位移,工况2和工况4运载器和导弹在方向有轻微波动,工况4比工况2运载器和导弹在正方向位移略微更大,工况2和工况4运载器和导弹在方向位移也基本相同。
姿态角
图14和图15表示出水过程运载器和导弹姿态角,给出了工况2和工况4的姿态角。
由图14、图15可知,在俯仰角、偏航角、滚转角这3个姿态角里俯仰角和偏航角对导弹能否成功发射的决定性更大。工况2和工况4运载器和导弹偏航角波动范围不超过25°,表明工况2和工况4运载器和导弹偏航角的变化都比较小。工况2运载器俯仰角从5°逐渐减小至-66°;工况4运载器俯仰角从10°减小至-106°,表明工况4比工况2发射过程中运载器俯仰角的变化幅度更大。工况2导弹俯仰角从5°逐渐减小到-44°;工况4导弹俯仰角从10°减小到-79°,表明工况4比工况2发射过程中导弹俯仰角的变化幅度更大。工况2运载器的滚转角从0逐渐增大到16°,工况4运载器的滚转角从0增大到12°,工况2导弹滚转角从0增大到16°,工况4导弹滚转角从0增大到152°,表明工况2和工况4发射过程中运载器和导弹滚转角变化基本相同。整体来看工况4比工况2发射过程中运载器和导弹的姿态角变化更大。

图14 工况2、工况4运载器姿态角曲线Fig.14 Attitude angles of launch tube in working condition 2 and 4
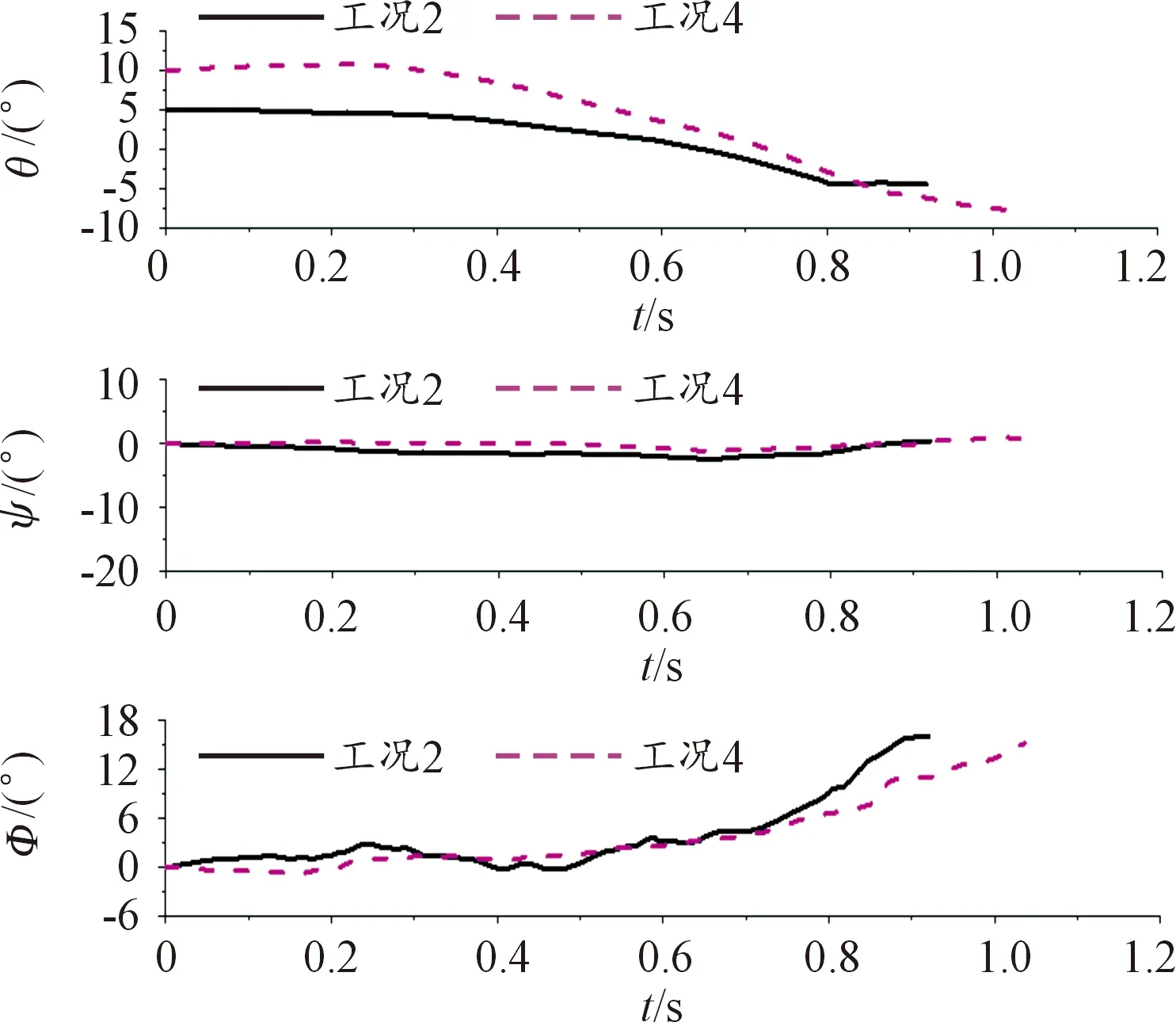
图15 工况2、工况4导弹姿态角曲线Fig.15 Attitude angles of missile in workingcondition 2 and 4
轴向速度
图16表示了工况2和工况4运载器和导弹轴向速度曲线。
由图16可知,运载器轴向速度逐渐减小,不施加弹射力时2种工况运载器轴向速度先略微减小,在施加弹射力以后,2种工况运载器轴向速度最后减小至-0.5 m/s。当不施加弹射力时,2种工况导弹轴向速度先略微减小,在施加弹射力以后,2种工况导弹轴向速度在推力作用下最终都增加到20 m/s左右满足出筒的速度要求。弹射过程中工况4运载器轴向速度减小趋势慢于工况2,工况4导弹轴向速度增大趋势慢于工况2。

图16 工况2、工况4运载器和导弹轴向速度曲线Fig.16 Axial speed of launch tube and missilein working condition 2 and 4
出水倾斜角度优化分析
进行倾斜角度对运载器式潜射导弹分离影响的优化分析。设置出水时刻导弹的倾斜角度为3°,仿真计算得出相应的筒弹分离时刻导弹俯仰角为0.82°。由于出水时刻倾斜角度5°相应的筒弹分离时刻导弹俯仰角为-4.4°,所以筒弹分离时刻导弹俯仰角为0对应的出水时刻倾斜角度在3°~5°。设置出水时刻导弹的倾斜角度为3.2°仿真计算得出相应的筒弹分离时刻导弹俯仰角为0.1°接近为0,导弹接近垂直弹射离开运载器,又设置出水时刻导弹倾斜角度3.3°进行仿真计算得到筒弹分离时刻导弹俯仰角为-0.4°,所以最优的出水倾斜角度应该是3.2°。
5 结论
本文对不同弹射位置、出水角度的运载器式潜射导弹分离特性进行了数值模拟分析,得到以下结论:
1)建立了一套复杂水动力环境下的运载器式潜射导弹出水分离仿真方法,计入运载器跨越水气介质交界面的影响,添加了潜射导弹出水过程的惯性力、粘性力和波浪扰动力的因素,综合考虑适配器在筒弹分离过程的影响,能够模拟运载器和导弹从水下发射到筒弹分离结束的完整过程。
2)各种工况下运载器和导弹在方向和方向有较大的位移,在方向有轻微的晃动,各种工况下运载器和潜射导弹的姿态角和轴向速度的变化稳定性较好,证明了这种分离方式的合理性。
3)发射过程中比较工况1、工况2、工况3,弹射起始高度距离水面位置越大,运载器和导弹的位移和姿态变化更大,其中俯仰角增加比较明显。
4)比较工况2、工况4,倾斜10°出水比倾斜5°出水在发射过程中运载器和导弹的位移和姿态角,发现俯仰角的变化更大,而且运载器和导弹轴向速度减小趋势更慢,最优的出水倾斜角度是3.2°。