大半径电涡流的金属目标探测性能研究
2022-04-08王晨斌郭文超高伟涛马铁华靳书云
王晨斌,郭文超,高伟涛,马铁华,靳书云
(1.中北大学 电子测试技术国家重点实验室,太原 030051;2.中北大学 电气与控制工程学院,太原 030051;3.华北计算机系统工程研究所,北京 100083)
1 引言
金属移动目标探测一直以来都是航天航空、导弹防御、军事作战领域的重要课题。当前针对金属弹头、无人机、车辆等移动目标探测受被测目标速度、姿态、红外特性以及距离等因素影响,大多采用多传感融合的复合探测技术,以弥补单一探测单元在精确性和鲁棒性上的不足。针对弹头、无人机等飞行目标的复合探测过程中,常用的激光、红外、毫米波雷达等探测环节具有较强的辐射特性和功耗,应用于移动平台时具有较大的限制条件,而大半径电涡流传感器具有更强的隐蔽能力和较弱的辐射特征。在应用于移动平台的金属飞行体探测过程中,使用红外阵列和电涡流的复合探测方法可极大地减少系统成本、功耗和辐射特性。随着基于电磁场的金属探测技术的发展,前人利用电磁信号,围绕金属移动目标探测技术不断研究。通过对电涡流传感器输出信号进行降噪处理,成功将电涡流传感器应用于火箭滑橇的位移测试中,操作简单、价格便宜、性能可靠。设计励磁均匀性较好的励磁线圈搭配其他类型传感器可有效进行高速小目标飞行姿态识别,能够直观准确地显示金属探测及定位数据。因受到测量范围的影响,电涡流传感器主要应用于较短距离位移或振动测试、金属器件裂纹及厚度检测。涡流传感器在检测物体运动特征时,测量精度高,鲁棒性强,输出信号不受环境因素影响。针对电涡流传感器的应用场景进行结构设计和模型仿真扩展了电涡流传感器的线性范围,从理论上分析了线圈内径和厚度对线圈磁感应强度的影响,对线圈匝数、励磁电流强度等因素进行了分析并提出优化方案。
在此引入经过优化的电涡流探测单元,提出一种基于电涡流传感器的金属移动目标探测方法,通过优化的电涡流线圈模型,针对不同距离来袭的金属移动目标所产生的不同涡流电信号,在有效探测范围内,根据不同的响应电流,判断金属移动目标移动特征。致力于寻找和设计合适的电涡流模型以在小功率情况下,提高系统整体性能,针对电涡流探测距离较近的问题,改进涡流线圈参数,以提升其探测性能。
2 金属移动目标探测原理
探头线圈通以高频振荡电流后,在探头线圈中产生交变磁场,金属移动目标经过电涡流传感器的有效探测范围时,在金属移动体表面产生感应涡流,产生感应磁场。与的磁场方向相反,由于的存在,会导致探头线圈闭合面的磁通量和探头线圈的等效阻抗发生变化,原理图如图1。
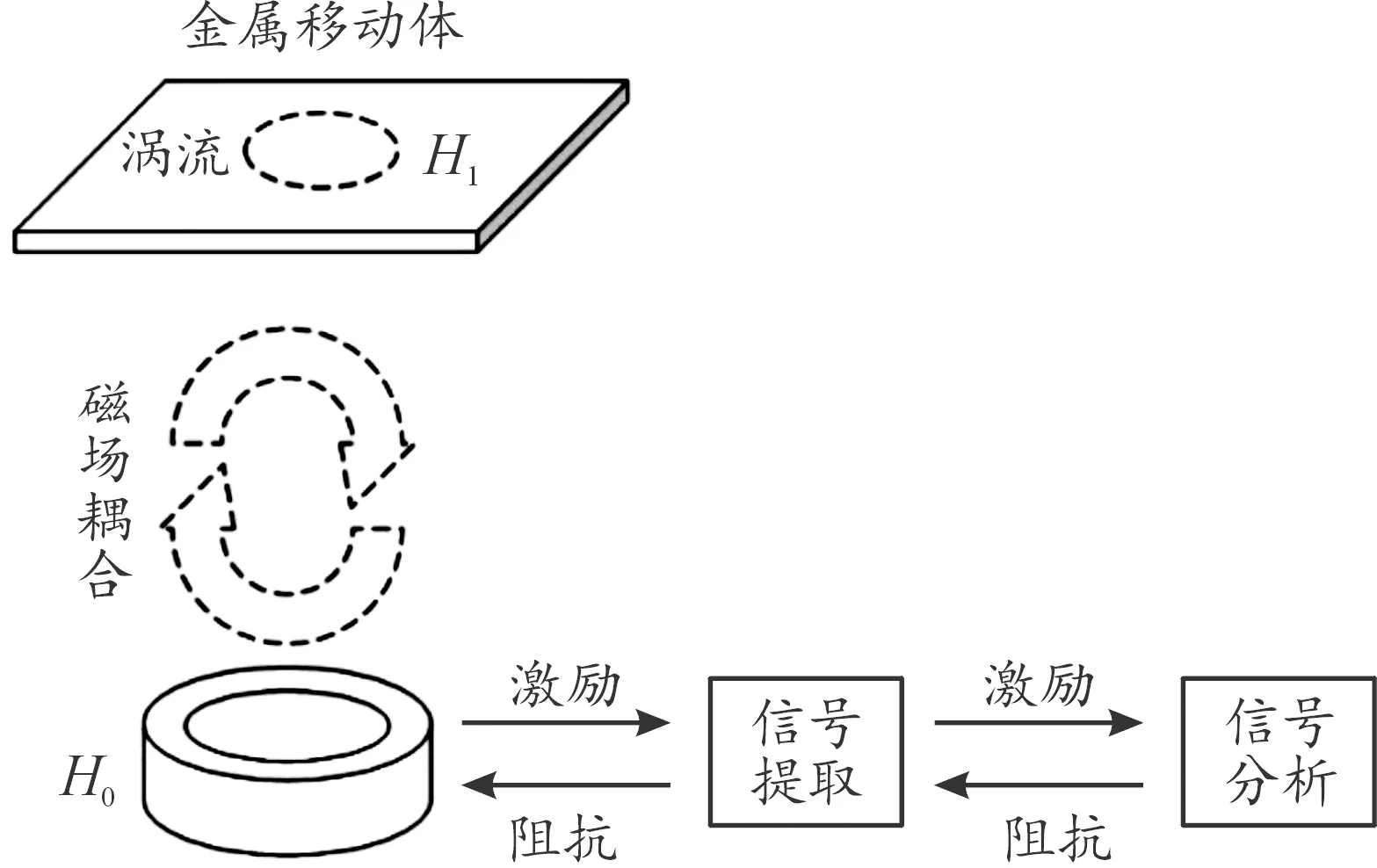
图1 电涡流检测原理图Fig.1 Schematic diagram of eddy current testing
应用电涡流传感器可以很好地弥补多传感融合的金属移动目标探测过程中信号不连续、红外特征强、隐蔽能力弱等缺陷,然而传统涡流传感器探测范围无法满足金属移动目标检测需求,我们针对电涡流探测存在的问题,在建模仿真的基础上,从探头线圈的几何参数优化来提高电涡流传感器的实际测量范围,达到在较远距离探测金属移动目标的效果。总体设计流程如图2所示。

图2 总体设计流程框图Fig.2 Overall design flow chart
3 电涡流探测结构优化
为实现可在移动平台上搭建复合探测系统,满足低成本、低功耗要求,同时要求线圈外直径不超过0.3 m,探测距离要求0.5 m以上。考虑在相同供电功率的情况下,增大电涡流线圈半径,以满足探测距离要求;电涡流探测结合电桥电路,可良好地提高电涡流信号响应灵敏度,保证灵敏度要求;在小功率供电的情况下,可减少线圈直径,提高线圈匝数。
经过MATLAB仿真分析,得出线圈优化参数,在线圈匝数、内半径以及厚度不变的情况下,改变外半径的值,做出不同外半径情况下的轴向磁感应强度与距离之间的关系曲线,结果如图3所示。
图3中,代表线圈的外半径,分别对外半径为0.15 m、0.14 m、0.13 m、0.12 m和0.11 m的线圈进行仿真。空心线圈的轴向磁感应强度与距离的变化关系受外半径的影响较大,在检测距离小于0.1 m时,外半径小的线圈轴向磁感应强度大,但是轴向磁感应强度衰减快,线圈外半径越大,在近距离处磁感应强度越小,轴向磁场衰减慢。检测距离大于0.1 m时,外半径大的线圈轴向磁感应强度大于外半径小的线圈的轴向磁感应强度,即外半径大的线圈敏感范围大于外半径小的线圈的敏感范围。对于远距离目标探测,线圈外半径越大,轴向磁感应强度越大,敏感范围越大,灵敏度越高,线性范围更大。
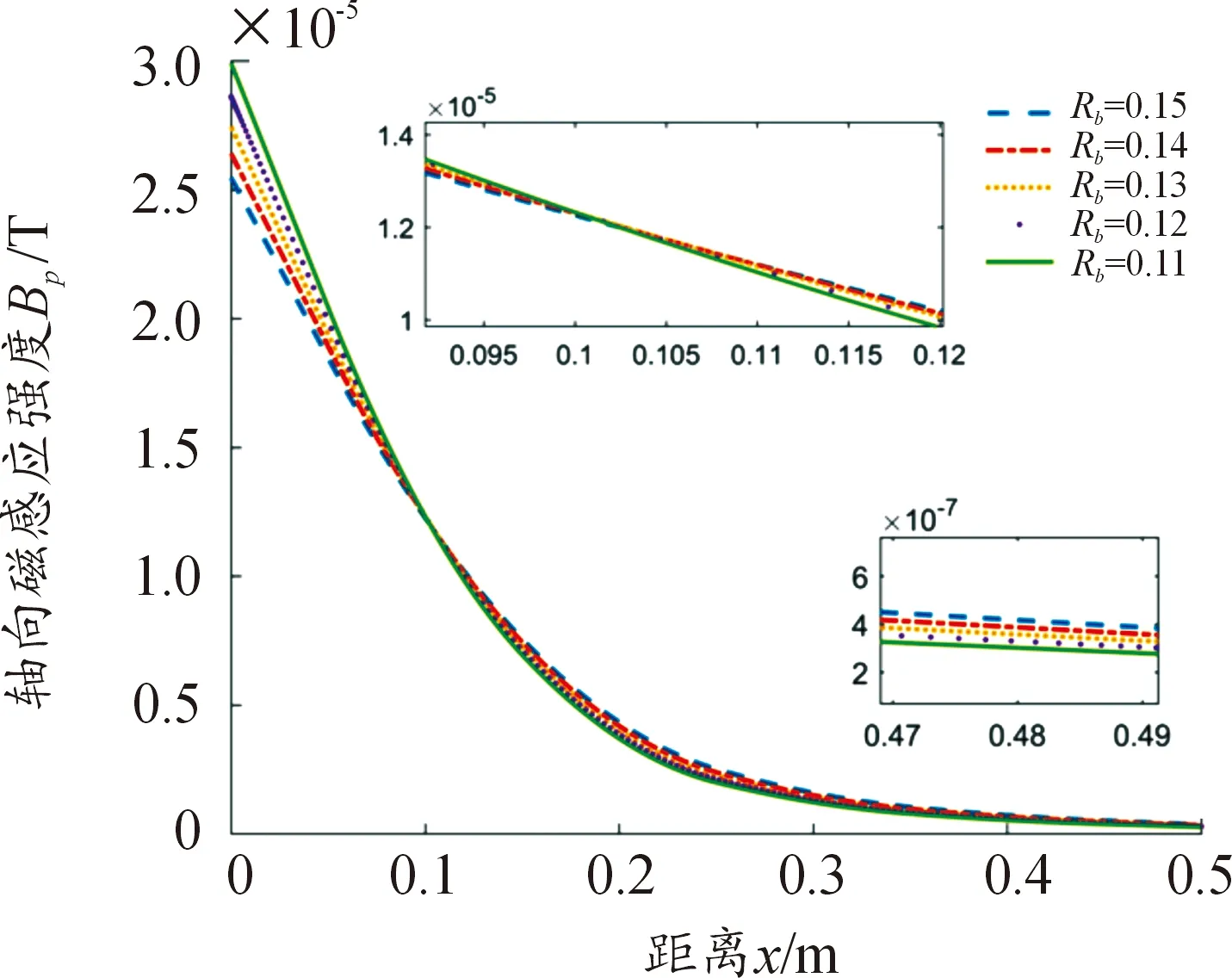
图3 外半径不同的线圈Bp-x曲线Fig.3 the curve of Bp-x with different outer radius
通过电涡流模型仿真分析得出:线圈内半径和厚度对电涡流传感器远距离探测性能影响较小,而线圈外半径对电涡流传感器的探测距离与探测性能有直接影响。基于仿真分析设计电涡流传感器线圈,为满足可在移动平台上安装复合探测系统,要求线圈直径不超过0.3 m,兼顾低成本低功耗,线圈设计外半径为150 mm,内半径140 mm,厚度5 mm,并使用0.1 mm漆包线绕制线圈。
3.1 优化电涡流信号采集
电涡流传感器的被测参数的变化可以转换成线圈的品质因数、等效阻抗和等效电感的变化。通过转换电路将这些参数的变化转变为电参量的变化进行输出。使用直流电桥法设计电涡流的信号采集电路。电桥法可以将微弱的电阻变化转换为电压变化,是一种精度很高的测量方式。设计的电涡流信号采集电路如图4所示。
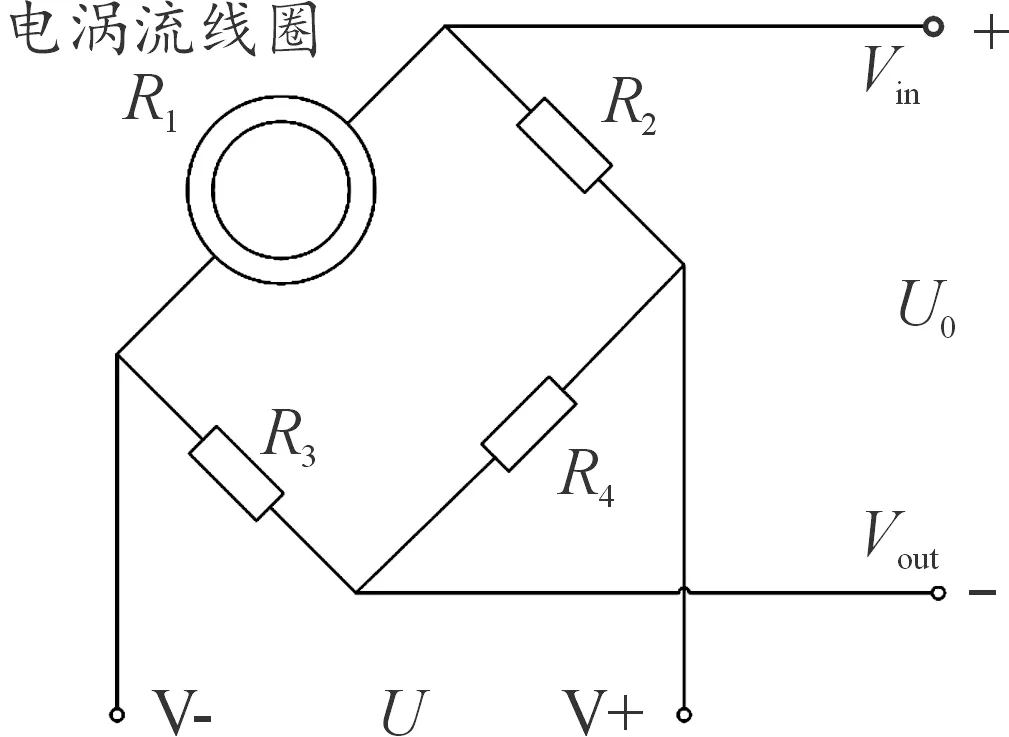
图4 电涡流信号采集电路图Fig.4 Eddy current signal acquisition circuit
图4中把绕制的线圈当做电桥的一个桥臂,另外3个臂使用固定电阻,把电涡流线圈非电量的变化转换为电量的变换(即电桥的输出)。采用直流激励作为电桥输入,当电涡流线圈所产生的均匀磁场有轻微扰动时,产生的电动势使得线圈两端的电势差发生变化,即产生输出信号,通过电桥电路成倍放大。
在电桥中,电涡流线圈可视作可变电阻,其变化量为Δ。、、为固定电阻,为输出电压,初始状态下,电桥处于平衡状态,当电涡流线圈存在变化量Δ时,电桥输出电压为
(1)
3.2 信号放大及滤波电路优化
经过实验测试,放大滤波电路设计中采用先放大后滤波的方式更适合本文信号的检测。上述的电桥输出的电压在毫伏级别,故需进行相应的放大将信号放大已完成后续操作,该仪表放大器的放大倍数为

(2)
设计的放大电路如图5所示。
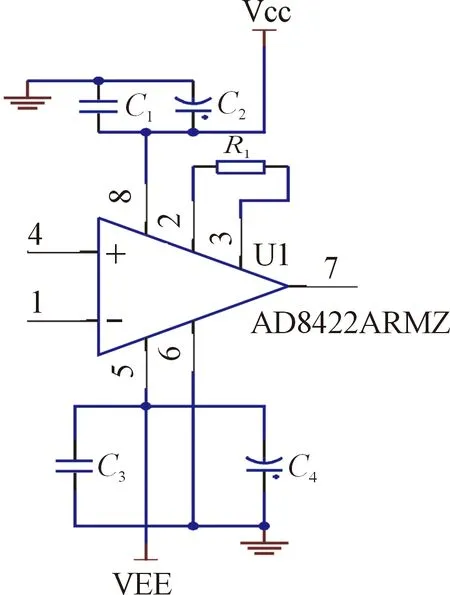
图5 放大电路图Fig.5 Amplifier circuit
图5中,为增益调节电阻。滤波器选择压控电压源二阶滤波电路,如图6所示。

图6 滤波电路图Fig.6 Filter circuit
图6中、和、组成RC网络,形成二阶滤波电路。
3.3 比较电路
如图7所示,比较电路中电压比较器LM393与、、构成比较电路。、、为参考电压(阈值电压)设置部分。通过调节的值来达到控制参考电压的目的。LM353在此电路中作为跟随器使用,可以起到缓冲、隔离以及提高带载能力的作用。
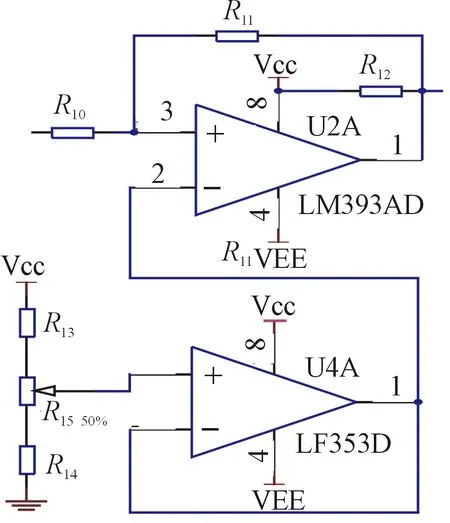
图7 比较电路图Fig.7 Comparison circuit
将上述信号采集电路、放大及滤波电路,以及比较电路进行联合仿真,在仿真中使用可变电阻替代电涡流线圈,调节可变电阻器的阻值,表示电涡流线圈在检测到金属移动目标时线圈阻抗的变化,电路仿真输出图如图8。
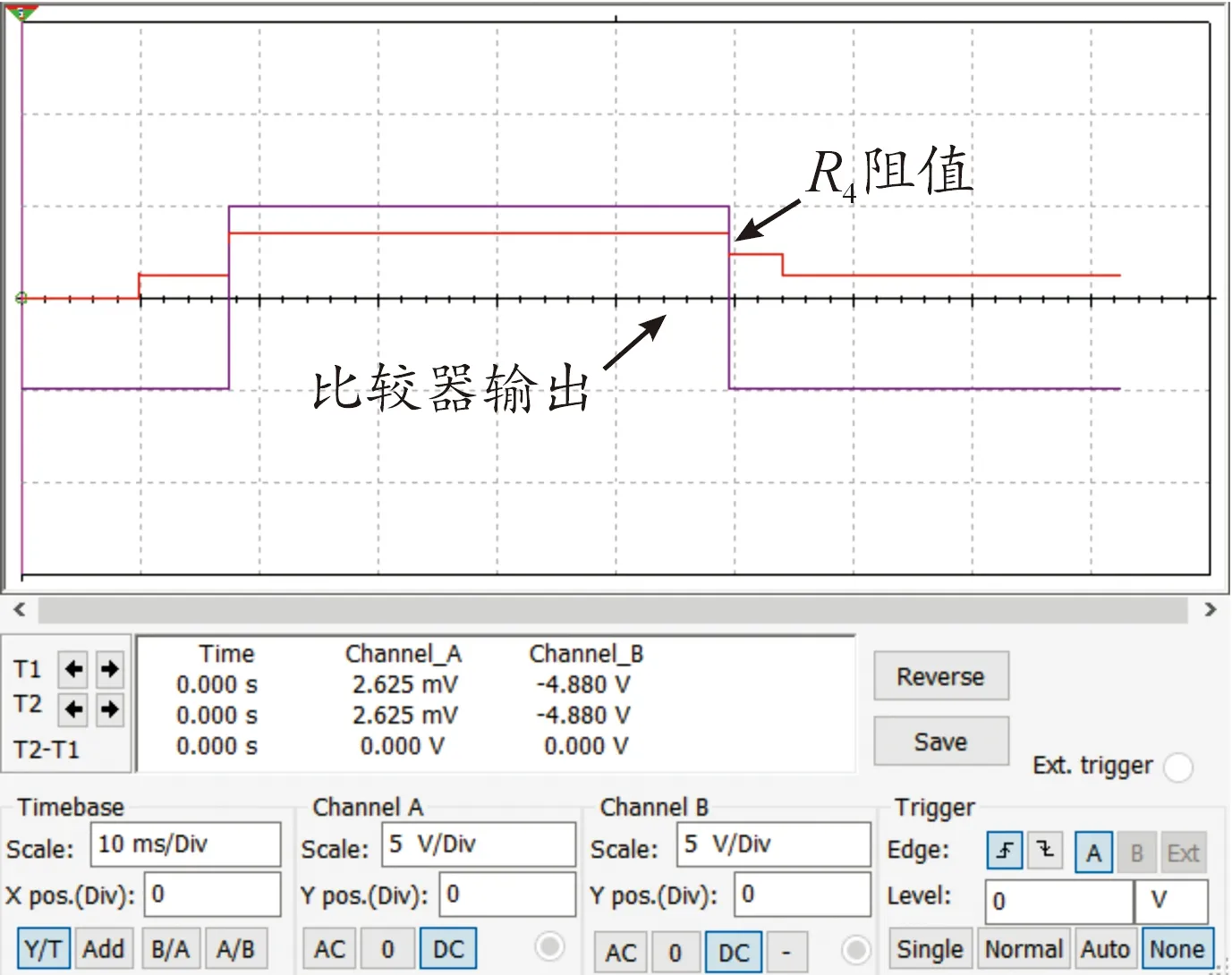
图8 优化电路仿真输出图Fig.8 Optimized circuit simulation output diagram
由图8可知:初始时刻,比较器输出为低电平,电桥处于平衡状态,经过放大器后输出信号近似为0;随着可变电阻阻值的变化,经放大器输出的信号变大,当达到响应阈值时,比较器翻转,输出高电平信号,即电涡流传感器输出响应信号。
4 金属移动目标模拟实验及分析
选择探头线圈的外半径为 0.15 m,内半径 0.14 m,厚度0.005 m,进行多种类型金属移动目标模拟探测实验,分别利用磁铁和30 cm×30 cm×4 mm匀制铁板模拟金属移动目标运动,借助数字采集仪获取电涡流探测信号。
4.1 电涡流线圈探测移动磁铁
使用磁铁作为被测物体(磁铁相比金属目标有更强的磁感应强度,更利于被电涡流线圈检测)靠近探测装置,验证电涡流线圈对具有大量剩磁移动目标的探测效果,实验结果如图9所示。
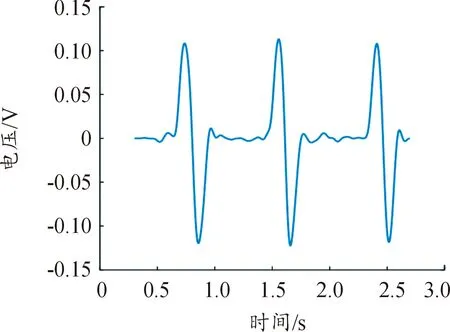
图9 线圈50 cm处信号响应曲线Fig.9 Signal response diagram at 50 cm of coil
由图9可知:在距离线圈50 cm处在线圈的探测范围内,被测物体3次经过线圈的探测范围,波形出现3次振荡,每次振荡对应磁铁每一次经过线圈的探测范围。每个震荡周期对应被测物体穿过线圈探测范围的时间;峰值被测物体导致的线圈磁通量变化的最大位置。
由图10可知:被测物体距离电涡流线圈越近,电涡流线圈输出信号越强,且被测物体速度的变化引起了输出信号幅值的变化。被测物体切割电涡流线圈的磁感线的速度不同而导致磁通量的变化率不同,导致感生的电动势不同,故产生幅值不一的信号。
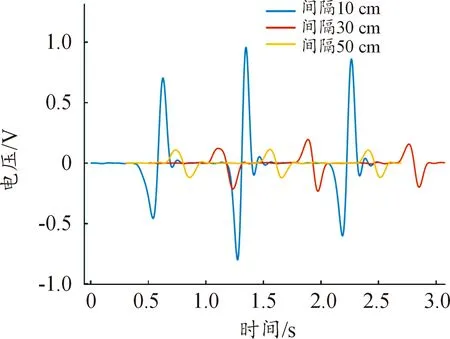
图10 不同距离处电涡流信号响应曲线Fig.10 Response diagram of eddy current signal at different distances
实验中信号从电桥的输出端进行采集,滤波操作在MATLAB中进行,数字采集仪的采样频率为1 kHz,数据处理中采用巴特沃斯低通滤波器,截止频率为20 Hz。
实验对磁铁移动引起电涡流线圈输出信号的影响的研究,研究表明:磁铁移动切割电涡流线圈产生的磁感线,使得电涡流线圈输出信号;信号的周期对应磁铁穿过电涡流线圈探测范围的时间,信号的幅值受到距电涡流线圈距离以及磁铁运动速度的影响。且磁铁运动速度越快,其磁通量变化越快,从而产生更高的感应电动势。
4.2 电涡流线圈探测移动匀制铁板
实验使用移动金属物体(30 cm×30 cm×0.4 cm的匀制铁板)作为被测物体来观察电涡流线圈的输出信号。被测物体相较磁铁,不具有磁性,但是带有一定的剩磁。金属板初始运动距离线圈50 cm,横向进入线圈的探测范围,步进20 cm,实验结果如图11所示。
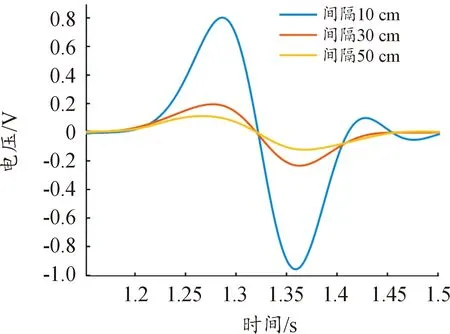
图11 被测物体在不同距离电涡流线圈响应曲线Fig.11 Response of eddy current loop of measured object at different distances
电涡流线圈输出信号的周期对应金属板经过电涡流线圈探测范围的时间,输出信号的幅值受到目标距离电涡流线圈距离远近以及在移动被测物体过程中速度的影响。取被测物体距线圈50 cm处响应信号进一步的分析,响应信号波形如图12所示。
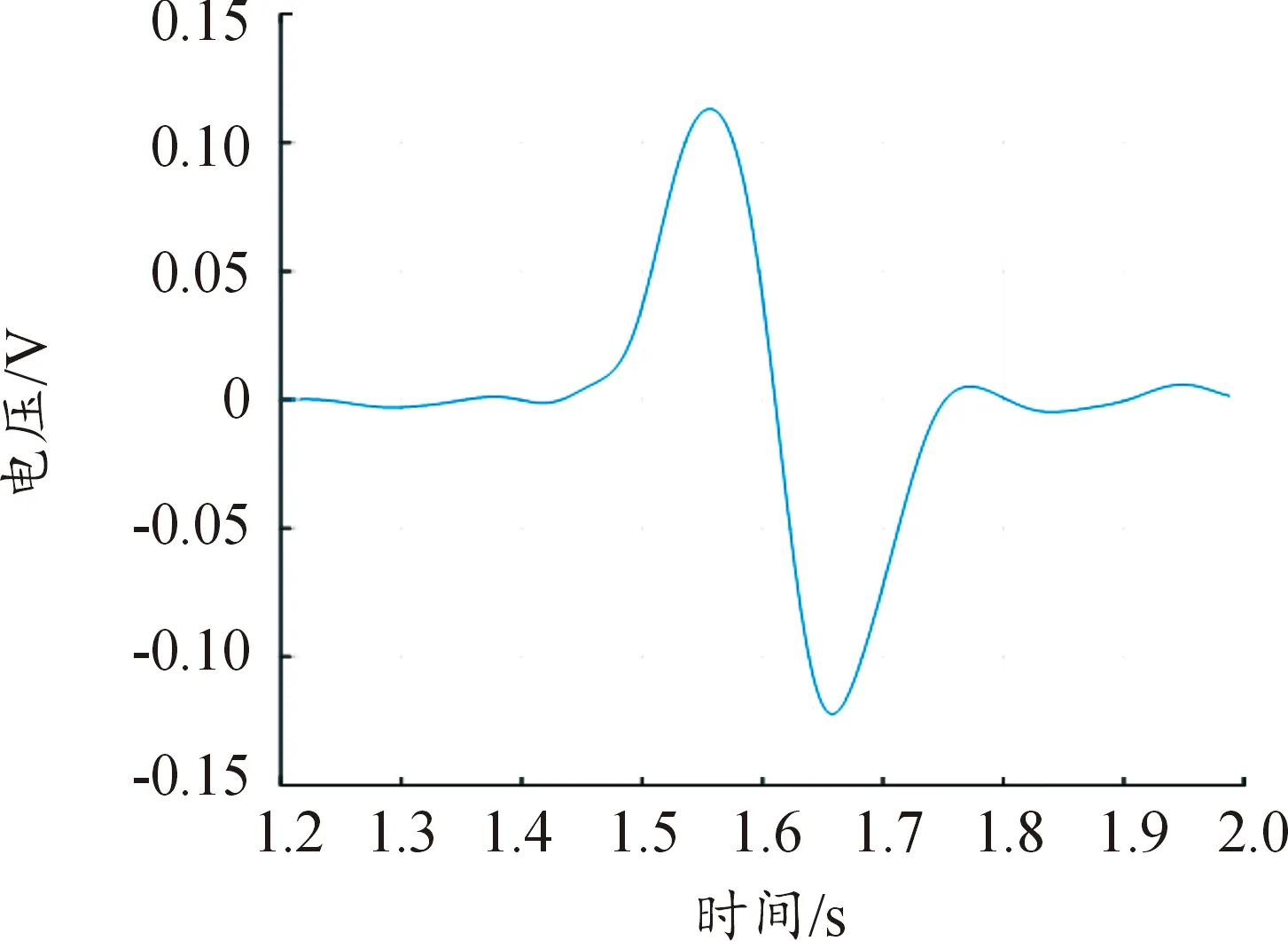
图12 被测物体距电涡流线圈50 cm的响应信号波形Fig.12 The distance between the object and the vortex streamline circle is 50 cm
由图12可知:被测物体距电涡流线圈50 cm处移动时,电涡流线圈输出信号的周期为0.29 s,从而可以求出被测物体移动的速度。电涡流传感器产生的静态磁场的有效范围为80 cm,故可认为被测物体进入时即进入电涡流线圈的探测范围,离开时即离开电涡流线圈的探测范围。在假设成立条件下,可求得被测物体在电涡流线圈的探测范围内的平均速度为2.7 m/s。
波峰和波谷的值不相等,有2种可能的影响因素:
1)在被测物体进入电涡流线圈的探测范围时,其运动速度<,在被测物体离开电涡流线圈的探测范围时,其运动速度>;
2)被测物体移动进入电涡流线圈的探测范围时,在标注的距离电涡流线圈50 cm处,金属板离开电涡流线圈的探测范围时,产生的微小偏差。
由于被测物体在运动过程中的姿态位置的微小改变以及振动影响,在信号采集过程中会出现噪声波纹,可能会影响信号响应准确性,造成响应延迟或虚警。
可对滤波电路进行针对性调整提高滤波效果,或提高信号响应阈值,降低虚警率。
4.3 匀制铁板垂直进入线圈探测范围
为检测电涡流法向测量范围,使用匀制铁板在距电涡流线圈5.5 m处,以2.76 m/s(传送带标定速度,由于总存在响应时间延迟,若速度过快,易导致距离计算误差过大)的匀速垂直接近电涡流线圈,至距线圈10 cm处反向离开,电涡流响应信号波形如图13所示。

图13 被测物体垂直靠近电涡流线圈的响应信号波形Fig.13 The measured object is vertically close to the eddy current coil
由图13可知:被测物体垂直进入电涡流线圈的探测范围,在1.8 s时被电涡流线圈探测到,即被测物体距电涡流线圈为54 cm时,电涡流线圈检测到金属目标。
当被测物体从不同的方向靠近电涡流线圈时,电涡流线圈都可以对被测物体进行有效的探测,经过实验验证,在被测物体垂直于电涡流线圈并靠近时,在被测物体距离电涡流线圈54 cm时,电涡流线圈能够采集到信号输出,以此可作为下一步工作的启动信号。
经过电路测试,电涡流线圈的响应时间<10 μs,调理电路的响应时间为0.35 ms,电涡流线圈的探测距离为54 cm。若炮弹速度1 000 m/s,约在电涡流传感器的探测范围内飞行0.4 ms,而整个电涡流探测部分的响应时间总和约为0.36 ms。涡流探测部分的响应时间小于炮弹在电涡流传感器探测范围内的飞行时间,故所设计的电涡流探测部分可以完成对金属飞行体的探测并完成响应。
5 结论
提出了一种基于电涡流传感器的金属移动目标探测方法,在金属目标检测方面具有低成本、低功耗、高灵敏度等特点,通过Maxwell电磁场仿真以及电路仿真对电涡流线圈结构和电路结构进行优化,并进行模拟探测实验。实验表明,相比于同等功率的传统电涡流传感器,经优化的大半径电涡流传感线圈的探测距离显著提升,响应精度得到有效提高,在高速目标探测过程中亦可达到有效响应,具有实用价值,将进一步应用于针对金属移动目标、无人机、车辆的多传感融合探测实验中。