水下机器人定位导航技术发展现状与分析
2022-04-08赵河明
范 刚,张 亚,赵河明,李 波
(中北大学 机电工程学院,太原 030051)
1 引言
自上个世纪中后期,无人潜航器(unmanned underwater vehicle,UUV)受到越来越多国家的重视,由于具有隐蔽性好,可搭载多种用途传感器、设备或武器,可执行如扫雷、反潜等特殊任务,效费比高,机动灵活,可回收再利用等优点,世界各国都在大力开展UUV的科研工作。UUV依照控制类型的不同,可以分为遥控操作潜水器(remote operated vehicle,ROV)以及自主水下潜器(autonomous underwater vehicle,AUV)2种。由于AUV不同于ROV,其与水面人员无脐带连接,导航定位完全依靠自主,且AUV自身的体积和能源储量有限,因此研究出耗能低、多目标、航程远、定位精度高的导航定位系统,对于AUV是否能胜任远距离多用途任务至关重要。
以下主要介绍UUV的几种基本导航方式,并着重列举出近些年国内外热点研究的几种组合导航系统,分析各自的系统原理,比较它们之间的优劣,提出了目前的技术难点和将来的研究方向。
2 水下机器人基本导航方式
2.1 惯性/航位推算导航
航位推算导航(dead reckoning,DR)是一种很常见的基本导航方式。其方法是依靠罗经和多普勒速度计(doppler velocity log,DVL)得到水下潜器的位姿、速度,然后对时间进行积分,推算出当前位置。
惯性导航(inertial navigation system,INS)应归类于航位推算导航。原理与航位推算导航相似,通过三轴陀螺仪、三轴加速度计和DVL得到潜器的旋转角速度、位姿方向和加速度,结合相关数据对时间进行两次积分,解算出潜器当前的位置。惯性导航系统可分为平台式以及捷联式2种,因捷联式相比于平台式而言,有着体积小、结构简单、方便维护等特点,被大多数惯导系统所采用。
1958年,世界上第一艘核潜艇美国“鹦鹉螺”号就搭载了当时较先进的惯导系统在北极连续潜航21 d,航程15 086 km,而误差仅有37 km。我国对于惯导系统的研究相对较晚,不过从1994年沈阳自动化所成功研制的第一台AUV“探索者”号,到2018年北京自动化控制设备研究所研发的深海型高精度惯性基组合导航系统,研究成果是相当可喜的,至此我国完全依赖于国外水下高精度导航设备的历史终于被打破了。
但是无论是DR或是INS,都会随着时间的累积而使得误差逐渐增大,从而偏离原来的目标位置。通过上浮至水面,获取卫星定位信号,虽然可以修正误差,但上浮、下潜所需的能量较大,这对于能源本就有限的水下潜器来说是不可取的。如何使用更多的辅助导航技术来修正随时间而积累的偏差,成为今后的重点研究方向。
2.2 水声学(SONAR)导航
由于水下电磁波的衰减极其严重,传播距离非常有限,对于长时间进行深水潜航的AUV来说水声导航系统因其在水中较电波、光波传播距离更长成为了目前比较主流的水下导航方式。
水声学导航的原理是通过计算AUV与声标之间声波信号的传输时间及其相位差来确定AUV与声标之间的相对位置,然后通过坐标转换得到AUV在大地坐标系上的位置信息。水声学导航大致可分为3类,即长基线(LBL),短基线(SBL)和超短基线(USBL)3种导航方式,具体取决于基线的长度、基阵的数量和布置位置(如图1)。

图1 3类声学定位导航系统示意图Fig.1 Schematic diagram of 3 kinds of acoustic positioning and navigation systems
3种导航方式各有利弊,LBL导航精度最高,但其基阵布设需花费大量的时间和成本,SBL和USBL则相对简单但其工作距离和精度都要比LBL小的多。表1为声学导航系统的分类及特点。

表1 声学定位导航系统分类Table 1 Classification of acoustic positioning and navigation systems
国外的声学导航系统发展相对较早,包括美国、法国、英国等国家已经生产推出系列化的产品,从军事应用到民品,种类多样,技术成熟。2013年,我国自主研发的载人潜器“蛟龙号”,利用LBL长基线导航系统,实现了静止状态下方差为2 cm的定位精度,标志着我国声学导航技术迈向了新的高度。
声学导航系统的误差来源主要有系统误差、声速误差、反射路径误差、噪声误差和测量误差等。如何有效的降低这些误差对信号的干扰,是以后声学导航研究所必须面临的问题。
3 水下机器人组合导航方式
3.1 SINS/SONAR组合导航方式
水声学导航系统必须在其基阵范围内才能够发挥作用,因而作用范围有限,而惯导系统的位置误差会随着时间的累计不断增加。为了实现远航程、高精度的导航任务,SINS/DVL/LBL组合导航应运而生。
SINS/DVL/LBL组合导航系统不仅会明显的降低惯导系统的时间累计误差,还会提高水下机器人的工作范围,使得水下机器人在保障导航精度要求的前提下,能够到达更远的距离。李旻等阐述了一种SINS/DVL/LBL组合导航系统,验证了SINS/DVL位置误差的可观性低,而LBL可为其提供准确的位置信息,进而提高位置误差可观性。法国iXblue公司生产的“ROVINS”纯惯导位置精度为0.1%TD,添加了USBL/LBL辅助导航之后,其位置精度三倍于USBL/LBL的位置精度性能。
复杂的水下环境造成了不可避免却对导航系统性能影响严重的干扰数据,对于数据的处理方面,张涛等阐述了一种利用UKF对多传感器数据进行融合处理的技术,表明UKF滤波精度确实是要高于EKF。赵俊波等在SINS/DBL/LBL组合导航系统中使用改进的变分贝叶斯滤波方法来代替经典的卡尔曼滤波方法,改善了由测量噪声和野值干扰所带来的滤波精度下降问题。朱兵等提出了一种联邦卡尔曼滤波算法,降低了测量噪声对导航精度的影响。
以上几种滤波算法,均能较好的改善导航系统性能。
在水下信标的设计方面,叶连凤等设计了一种水下定位信标装置,其定位距离最大可以达到1 200 m,定位精度优于5‰,工作最大水深为300 m,最长工作时间要大于24 h。王丽等将DBSCAN算法应用到信标定位中,并设计了水下信标阵的整体航路。
SONAR/DVL/LBL组合导航系统既解决了惯导系统随着时间误差累积的缺点,也提高了水声导航的作用范围,但其导航精度依然存在着不小的误差,如何通过技术手段来修正这些误差,是今后SONAR/DVL/LBL组合导航需要解决的问题。
3.2 SINS/SONAR/GNSS组合导航方式
SONAR/INS导航系统虽然可以较精确的提供AUV的导航定位信息,但声标的位置定位工作是比较繁琐的,尤其对于未知海域来说,并没有足够的条件来进行声标、基阵的定位工作。利用全球卫星导航系统(GNSS)对海上浮标进行自主定位,AUV通过接收、处理海上浮标的声波信号,结合惯导系统和测深传感器最终确定自身的位置,从而较好的解决上述问题。
GNSS中美国全球定位系统(GPS)的空间信号精度为0.52 m;欧洲伽利略系统(Galileo)的空间信号精度为0.25 m;俄罗斯格洛纳斯系统(GLONASS)最高能达到0.03m的地面增强服务;我国的北斗卫星导航系统(BDS)定位精度优于10 m,测速精度优于0.2 m/s,授时精度优于20 ns并且在亚太地区的精度数据更加优秀。以上4种卫星定位系统均能较好的满足对海上浮标的定位需求。
卫星定位系统主要由不在同一平面的4颗定位卫星、地面基站和水面定位设备而组成,通过计算建立的数学模型,得到设备当前的位置信息。国内外研究人员对于SONAR/INS/GNSS组合导航系统都做了相应的研究。Youngberg等提出了一种SONAR/INS/GNSS组合导航方案,利用两个浮标接收GPS信号,获得其在大地坐标地上的位置,并且利用GPS相互通信,确定二者之间的距离差值,然后通过声学导航系统为水下多个目标提供位置信息。李士刚等对借助BDS和智能浮标为水下平台提供导航定位进行了实验验证,结果显示浮标阵内定位精度最高为4.5 m,边缘处的最低定位精度是7.7 m。在信标的定位精度方面,张丹等通过计算和仿真证明GPS对信标的定位存在一定误差,但不超过两米。王秉洲等利用SINS/SONAR/GPS设计了一种小型无缆水下机器人组合导航装置,可实现较长距离的导航任务。以上中外研究成果证明,通过浮标利用GNSS可以更好的提高水下定位导航精度,丰富了水下定位导航方式。
利用GNSS为AUV提供辅助导航实质上是地面导航通讯功能向水下的延伸。而如何将水下的信息通过GNSS传至地面指挥中心,形成陆海空全方位一体化的导航通讯系统,就需要依靠水下通信系统来完成。水下通信大多是结合GNSS形成与地面控制人员的联系,不仅可以将水下潜器的位置信息、获取的数据传送予地面/水面控制人员,还可以将控制人员的指令传达至水下潜器,以达到更好的定位导航和路径规划效果。由于电磁波在水中的衰减问题严重,最长的通信距离也只有百米左右,蓝绿光波虽然传播距离略长,但难以突破千米量级。传播距离至上千公里,通信速率可达10~100 bps的水声通信成为当前深海通信的唯一选择。
水下通信网络大致由水下节点、水面浮标、通信卫星节点和岸上基站等组成。目前美国已经实现了对水下100 m左右深度的激光通信。2001年,一种为高纬度地区和冰下作业而设计的ALTEX AUV完成了首次北极极地实验,它所搭载的通信系统通过冰上浮标和GPS实现了与地面考察人员的数据通信。Frédéric Mosca等设计了一种新型声源,采用中心频率为500 Hz,带宽为100 Hz的调制解调器,利用“被动时间逆转过程”实现了1 000 km范围内100 bit/s的远程通信。
由于水下环境复杂多变,海水声波的吸收衰减、海水的多经效应、多普勒频移大、水声信道的时变性以及环境噪声的叠加影响,水声通信需要攻克的这些技术难点是未来研究的主要方向。同时,水声信道的信号与GNSS信号都存在着受到外界恶意干扰的情况,如何让水下机器人自动识别干扰信号,自主进行航线修正也是此类组合导航方式所要面临以及必须解决的问题。
3.3 结合地球物理的组合导航方式
惯性/航位推算导航和SONAR/INS/GNSS组合导航存在误差随时间发散、隐蔽性差等缺点。地球物理导航因具有精确度高、隐蔽性好、不受外界干扰等特点,可以很好的弥补前述导航方式的不足。
地球物理导航系统主要由惯性导航单元、地球物理测量单元和数据匹配算法单元组成。惯性导航单元负责提供初始位置和工作范围的限定,地球物理测量单元主要提供AUV实时测量数据,数据匹配算法单元主要是将测量数据与地球物理数据库做匹配从而获得AUV的实时位置信息。地球物理导航的系统工作流程如图2所示。

图2 地球物理导航系统工作流程框图Fig.2 Geophysical navigation system workflow block diagram
地球物理导航大致可分为地形、重力以及地磁匹配导航,三者原理相似,其中研究人员对于地形匹配导航系统的研究较多。Ingemar Nygren在他的博士论文中提出了一种水下机器人定位方法,该方法借助声呐和海底地形图确定AUV的绝对位置。验证了伪波峰位置的似然函数收敛到一个高斯概率密度函数时,测量的波束数目会趋于无穷大。Meduna D K等使用地形相对导航技术(terrain relative navigation,TRN)在海中进行了导航实验,其导航精度达到了5~10 m,远超于航位推算导航的5%~25%观测精度,TRN/AHRS组合导航完全能够达到甚至超越水声学导航的精度,并且证实了高性能TRN可以使用低成本传感器来代替原来的高精度惯导系统和高品质声呐(如多波速回声测深仪)。韩月等对于地形辅助定位提出了一种改进的粒子滤波算法,以减少粒子多样性的损失来提高系统的定位精度。
对于其他2种地球物理导航方式,刘念等使用TERCOM和UKF进行重力梯度辅助导航,修正INS的累积误差,以达到提高导航精度的作用。葛锡云等利用地磁对INS系统进行辅助导航,仿真结果表明,500 s内的位置精度相比于纯INS系统提升了4倍,误差小于1 m。
地球物理导航的关键是获得先验地球物理数据库,而无论是国外还是国内对此数据的收集都是非常有限的,这也是制约地球物理导航的重要原因。如何获得精确、大量的地球物理数据库,并且设计高效、快速的算法来处理匹配数据是今后此方法研究发展的方向。
3.4 多UUV协同导航方式
在广阔无际的海洋中,想要依靠单独的UUV来完成任务,是很困难的。为了执行大范围、多任务、多目标的潜航任务,多UUV协同导航为此提供了可能。多UUV协同导航能够有效的降低惯导系统的精度误差,并且提高多个UUV的智能性和效率,完成单个潜器很难完成的任务。
多UUV协同导航按其结构方式不同,可分为2种,即并行式以及主从式。主从式相比于并行式成本更低,精度也较高,从而成为了多UUV协同导航的主流方式。Allotta等就设计了一种主从式多UUV协同导航系统,将多个AUV配备低成本惯导单元和深度传感器,其中只有一个具有高精度DVL,利用配备DVL的主AUV确定其他从AUV的位置,并且通过GPS与母舰通信,获得各个AUV的具体位置。
针对多UUV间的协调控制方面,牟春晖等设计了一种协调路径跟踪控制器,使得多UUV间的协调达到更好的效果。胡长清等通过建立滤波的状态方程和观测方程,利用INS和GNSS融合多种导航信息,提升了多UUV间的定位导航精度。Chen S等针对无领导多AUV系统和前导跟随多AUV系统,提出了2种新的容错控制技术,使得每个AUV与其相邻的AUV交换信息,即分布式共识控制策略来容忍多个AUV系统的信息传输故障。
另外,在控制算法方面,卢健等提出了一种序贯EKF协同导航算法,较好的提高了协同导航系统的定位导航精度。Sahu等提出了一种多AUV的集群控制算法,这种基于模糊人工势函数的模糊植绒控制算法要优于数学势函数的控制器性能,对多UUV的合作运动控制提供了有效的所需路径。
多UUV协同导航对于各个潜器的协调控制和个体间的通信要求较高,如何协调好每个个体的路径规划并且保持它们之间的通信顺畅是今后需要重点研究的方向。
3.5 结合人工智能的水下定位导航方式
近年来,人工智能与大数据技术的迅猛发展为水下定位导航提供了新的思路与方向。以模拟自然界为核心思路的人工智能算法,在目标识别定位、路径规划、改善定位精度等方面都得到了广泛的应用。
在目标识别定位方面,李昱等设计的一种基于卷积神经的水下识别系统识别率能够达到99.18%。美国Scripps海洋研究所与中科院声学所的研究人员通过对一组50层的深度残差卷积神经网络进行训练,实现了在未知海洋环境中83.8%的深度距离估计误差小于10 m,88.8%的声源定位距离误差小于1.5 km。徐凤强等设计了一种基于反馈机制融合USBL的多信息分析算法,并成功应用到海产品的智能抓取中。董鹏等利用YOLOv3目标检测算法在任务范围区域实现了目标的检测与定位。
对于未知海域的定位导航问题,张扬等就提出了一种基于ORB—SLAM2的水下定位算法,应用视觉SLAM通过相机在测量所处环境数据的同时,估计自身所在位置并绘制出周边环境的地图,用以后续的定位导航,并通过海试验证了此算法用于水下定位确实是可行的。
随着人工智能的迅速发展,其在水下定位导航的应用也将更加广泛。如何将人工智能技术与水声通信结合进行任务目标改变时路径的自主修改,如何配合远距离航程的AUV实现最后一段距离的目标定位是未来远航程、多目标、高精度定位导航的发展方向。
对水下机器人各类定位导航方式的特点进行总结和比较,如表2所示。
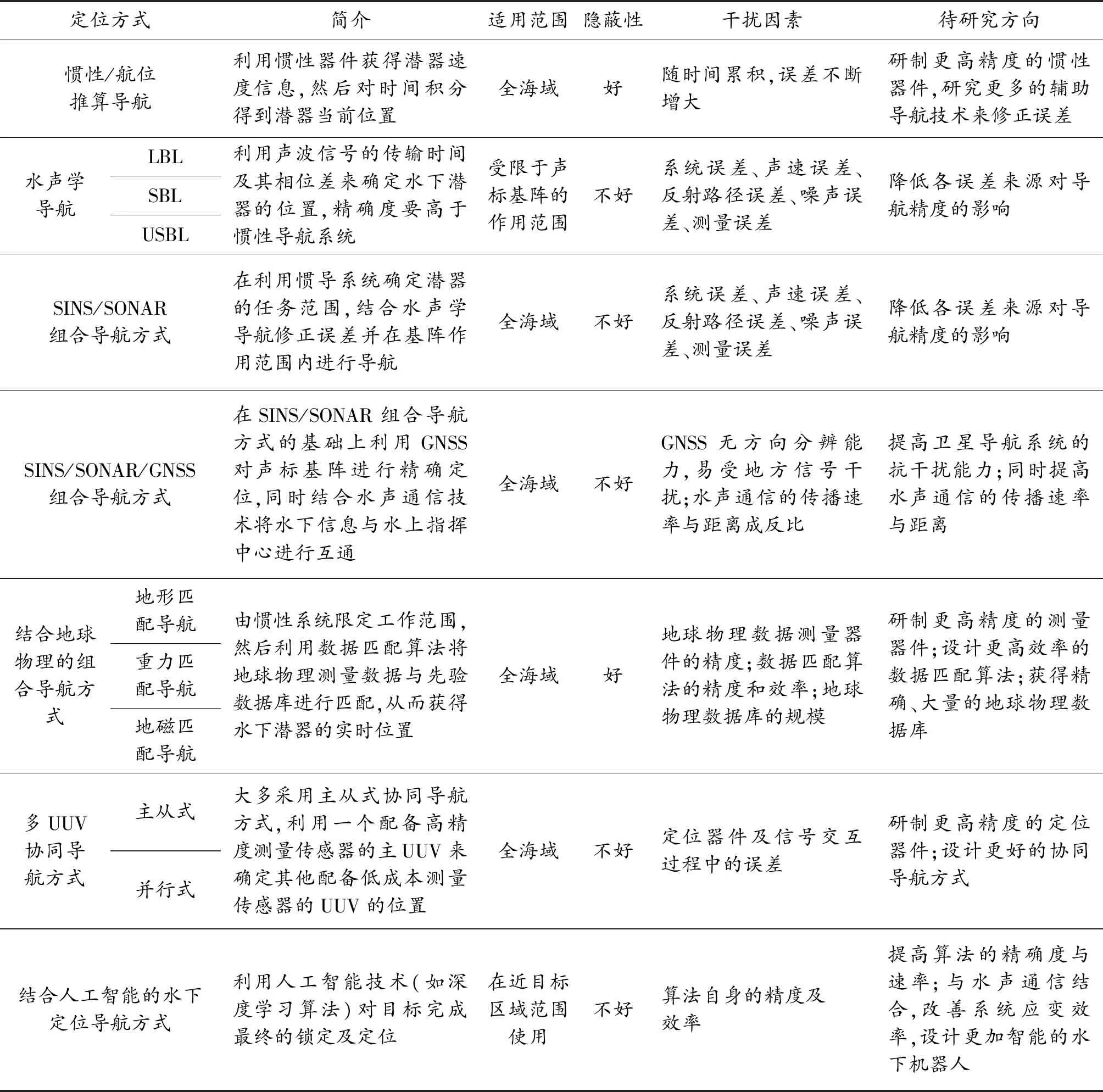
表2 水下机器人定位导航方法Table 2 Comparison of positioning and navigation methods for underwater robots
4 结论
本文根据近年来国内外对于水下机器人定位导航的研究成果,总结、分析了几种典型的水下定位导航方法,并结合如水声通信、人工智能等新技术的发展,展望了水下定位导航技术新的发展思路和方向。
今后水下定位导航的研究热点将会在以下几个方面:
1)提高数据滤波处理质量,设计鲁棒性更强的滤波算法。
2)设计高精度、低成本的测量传感器,提高水下机器人定位导航系统性能。
3)融合GNSS与水声通信,让地面人员对水下情况了如指掌,增强水下机器人位置的可观测性,提高水声通信的传输距离和速率。