仿生扑翼飞行器风洞实验研究进展
2022-04-07张春华
付 强,张 祥,赵 民,张春华,贺 威✉
1) 北京科技大学自动化学院,北京 100083 2) 北京科技大学人工智能研究院,北京 100083 3) 中国兵器装备集团自动化研究所有限公司,绵阳 621000
仿生扑翼飞行器是以鸟类或昆虫等为原型设计的飞行器,其飞行方式与鸟类或昆虫类似,能仅仅通过机翼扑动来产生飞行所需的升力和推力,具有较好的运动敏捷性和较高的能量利用效率[1],在国防军事和民用领域有广泛的应用前景.仿生扑翼飞行器所处流场的雷诺数范围一般在2000~100000之间,在这一范围的气体流动中层流起主要作用,使得飞行器除产生较大的升力和力矩外,还会产生较大的空气阻力,其升阻比不到普通飞机的1/3[2].而且随着机翼的扑动,周围流场属非定常流动,故用传统的空气动力学方法很难做出准确解释.为了提高仿生扑翼飞行器设计的精细化程度,需要研究环境风速、扑动频率、翼型、迎角等对仿生扑翼飞行器气动性能的影响,为飞行器整体设计提供参考.仿生扑翼飞行器研究方法一般有气动计算、风洞实验和外场试飞三种方法[3].气动计算方法虽然应用广泛,但对于处理数值分析所必需的建模和仿真是一项巨大的挑战,在涉及流固耦合时更加明显,且仿生扑翼飞行器运动机理复杂,变量多且耦合性强,目前还没有精确且适用的计算模型;外场试飞的方法无法精确测量出飞行器复杂的气动力;风洞实验可以在完全相同或者大体相同的条件下,对所研究的问题进行模拟与观测,因此所得数据比较真实、可靠.所以对仿生扑翼飞行器进行风洞实验是非常必要的.
1 仿生扑翼飞行器专用风洞
1.1 风洞
风洞即指风洞实验室,是可以人为产生并控制气体流动的实验装置,它可以实时模拟飞行器飞行时周围气体的流动,目前已被认为是一种飞行器设计、制造的重要实验方法.研究人员可以在风洞内进行包括飞行试验、强度试验在内的多种实验,用来验证新机型或者设计方案的合理性,并可以度量气流对实体的作用效果、观察物理现象.随着现代工业的发展,风洞展示出越来越重要的地位,不只是在飞行器的研究方面,在建筑、风能等研究方面也有重要的应用.
风洞一般由洞体、驱动系统和测量控制系统组成.早期的风洞一般采用开口式结构,洞体也较为简单,仅包括加速气流用的收缩段、放置飞行器的试验段和风机段三部分,且由于当时主要采用机械式力平衡装置进行测力,只能将飞行器固定在测力装置上进行升阻力测试,这就需要通过改变风洞结构来改变飞行器迎角、来流速度等参数,如1922年奥地利科学家Katzmayr[4]通过调节在风洞口处设置的挡板来模拟机翼的周期性变化,1968年英国生物学家Pennycuick[5]通过调节试验段洞口的朝向来改变飞行器迎流角度.但随着对实验精度要求的提高,洞体结构变得越来越复杂,为了减小外界气流对试验段气流的干扰,洞体试验段由开口式改为了闭口式;为了提高气流均匀度,并降低气流湍流度,增加了稳定段并在稳定段内部增加了金属防风网.现在的风洞洞体一般由稳定段、收缩段、试验段和扩散段组成,如图1所示为北京科技大学的开口回流式低速风洞结构示意图,其中稳定段和收缩段起到提高气流均匀度和加速气流的作用;试验段是对模型进行观察和测量的部位;一些风洞的扩散段分为第一和第二扩散段,第一扩散段起到降低流速、减少能量损失的作用,第二扩散段可将气体引向风洞外或者引回到风洞入口处.
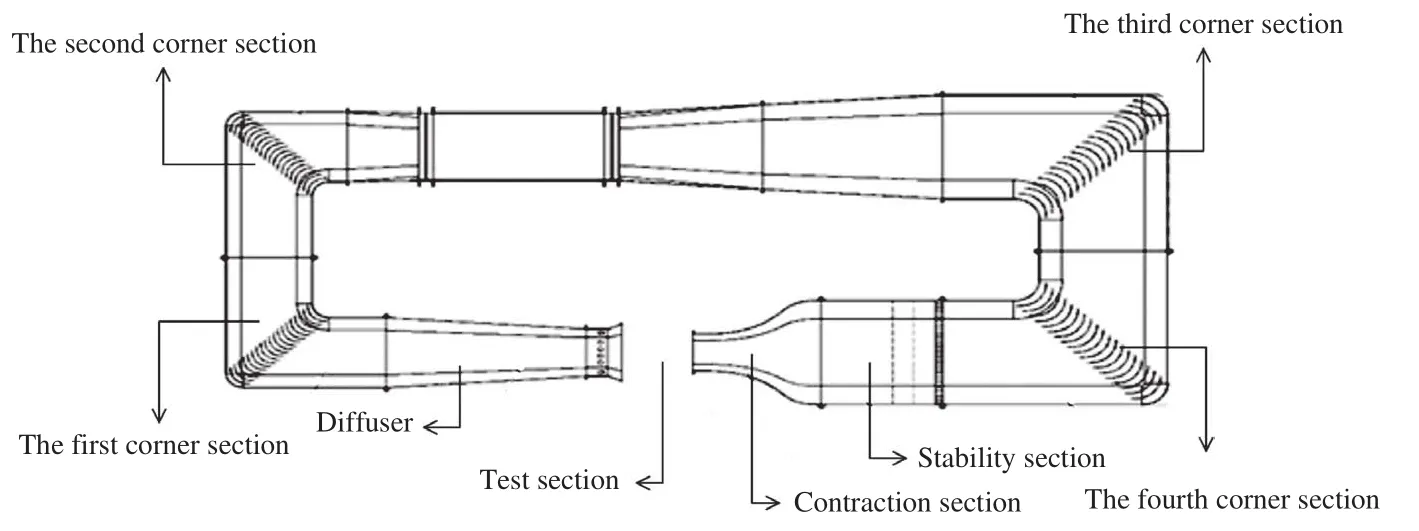
图1 开口回流式低速风洞结构示意图Fig.1 Wind tunnel structure of a flapping-wing aerial vehicle
风洞的驱动系统一般分两类,一类是由可控电机组和由它带动的风扇或轴流式压缩机组成;另一类是用小功率的压气机事先将空气增压贮存在贮气罐中,或用真空泵把与风洞出口管道相连的真空罐抽真空,实验时快速开启阀门,使高压空气直接或间接进入洞体.第一类驱动系统运转周期长,且气体流速的增大会使驱动功率急剧增大,所以多用于低速风洞.第二类驱动系统的工作时间一般是几秒到几十秒不等,且雷诺数较高,多用于跨声速、超声速和高超声速风洞.
风洞测量控制系统的作用是按预定的实验程序,控制各种阀门、活动部件、模型状态和仪器仪表,并通过天平、压力和温度等传感器,测量气流参量、模型状态和有关的物理量.随着现代计算机技术的发展,风洞测量控制系统已经由原来的人工测量和记录,发展为现在采用电子液压的测控系统,其实时性和准确度都有了质的飞跃.
基本上所有的风洞都是由以上三部分组成,但是不同用途的风洞在这三个方面又不尽相同.固定翼飞行器一般飞行速度比较快,所需风洞中的气体流速比较高,一般采用第二类驱动系统;而旋翼飞行器则由于其螺旋桨方向的问题,专用风洞一般采用自下向上吹风的方式;仿生扑翼飞行器专用风洞一般要求流场速度较低,但对流场品质要求较高.旋翼和仿生扑翼飞行器专用风洞多采用第一类驱动系统.
1.2 仿生扑翼飞行器专用风洞
仿生扑翼飞行器专用风洞根据试验段是否开放,可分为开口式和闭口式两种,开口式风洞试验段开放,洞壁干扰较小,但易受外界气流扰动,需要将操作间和实验间隔开,以减少外界气流对试验段气流的影响.根据扩散段是否将气流引回风洞入口处又可分为回流式和直流式风洞.如图2所示为北京科技大学开口回流式低速风洞,该风洞全长37 m,采用开口回流式结构,具备较低的稳定风速和较好的流场品质,可以满足对微型仿生扑翼飞行器的气动特性进行研究的要求.该风洞的主要参数如下:试验段口径为0.63 m×0.63 m;试验段长为0.7 m;可控风速范围为0.5~20 m·s-1;在常用风速范围内(1~20 m·s-1),流速稳定性系数≤0.5%;试验段气流偏角≤1°;试验段紊流度≤1%.

图2 北京科技大学微型飞行器专用风洞Fig.2 Special wind tunnel for a microair vehicle of University of Science and Technology Beijing
1.3 风洞配套实验装置
仿生扑翼飞行器与固定翼很大的不同在于,其在飞行过程中翅膀做周期性上下扑动.在自然界中,不同体型的鸟类或昆虫,其扑翼频率相差很大,气动特性表现也大不相同,所以在风洞实验中对扑翼频率进行控制非常必要.目前常用的频率测试方法是采用漫反射光电传感器,其基本原理基于光电效应,即在光照射在某种物质上时,该物质的电子吸收光子的能量而产生相应的光电效应.这种传感器的一大优点是可在不接触飞行器的前提下,测量到仿生扑翼飞行器的扑翼频率.如图3所示为欧姆龙VTE-18-4N4212漫反射光电开关.

图3 欧姆龙VTE-18-4N4212 漫反射光电开关Fig.3 OMRON VTE-18-4N4212 diffuse reflection photoelectric switch
为了测量全流场实时速度信息,在风洞实验中一般会采用PIV(Particle Image velocity measurement)系统,该系统通过在流场中布撒示踪粒子,并采用脉冲激光片光源射入到该流场中,通过多次曝光,得到粒子图像,之后通过对图像进行分析处理,得到流场速度分布图.该系统相较于皮托管测速,拥有诸多优点.首先皮托管测速采用接触式测量方法,其本身会对流场有一定干扰,其次皮托管只能对流场进行单点测量;而PIV采用非接触式测量方法,不会对流场造成影响,且其可对全流场进行瞬态三维测量.如图4所示为数字式粒子图像测速系统.

图4 数字式粒子图像测速系统Fig.4 Digital particle image velocimetry system
仿生扑翼飞行器在进行风洞实验时,其翅膀会进行上下扑动,为了在不干扰流场的情况下测量飞行器翅膀在飞行过程中的柔性形变,一般采用 DIC(Digital image correlation)系统.该系统采用两个摄像头,形成双目立体视觉来观察翼膜随迎角和流速等变化产生的形变量,是一种非接触式的光学测量方法[6-7].如图5为DIC系统在实验中的应用.

图5 DIC系统[6]Fig.5 Digital image correlation[6]
除高速摄像机外,往往还需要与飞行器专用风洞相配套的升阻力测试装置,1871年英国建造世界上第一台风洞的时候,就为其风洞配置了测量升力和阻力的天平[8].随着技术的发展,目前应变天平、磁悬挂天平、压电天平越来越多地被应用于升阻力测量中[9].目前经常使用的有二分量和三分量应变天平,二分量即指升力和阻力测量,三分量增加了俯仰力矩.除此之外,还有六分量应变天平,包括升力、推力、侧向力、滚转力矩、偏航力矩和俯仰力矩.仿生扑翼飞行器的气动力一般很小,最大能达到几百克,且会随着翅膀的周期性扑动做周期性变化,这就要求仿生扑翼飞行器专用测力装置有较好的量程精度且对气动力具有较好的动态响应.针对微型仿生扑翼飞行器,现多采用美国ATI公司(ATI industrial automation)的nano17系列六自由度传感器,如图6即为ATI公司的nano17力传感器,该传感器具有体积小、精度高,响应速度快和质量轻等优点,使用时只需根据自己实验所需,做一些简单的支撑件设计即可.

图6 ATI nano17Fig.6 ATI nano17
为了更直观地观察流场绕模型的流动现象,需要对风洞中的流场进行可视化.流场可视化方法包括实验显示方法和数值显示方法,实验显示方法是通过实验手段,把观察不到或不易观察到的流动现象进行显示,主要包括丝线法、烟线法和染色线法等方法;数值显示方法是通过计算然后用计算机图像进行可视化.上面讲到的PIV系统测量得到的全流场三维瞬态速度图,经过计算机处理后,即可作为数值显示方法用在风洞流场显示实验中.目前在清华大学、北京航空航天大学等学校的风洞实验中采用的方法都是烟线法.通常的做法是,使用一个由阀门控制的滴油系统,不断将不易燃的矿物油滴到金属丝上,然后给金属丝通电加热,油由于加热而产生烟雾,烟雾可以直观显示气流绕模型的流动状态.图7即为烟流法下显示的流场.
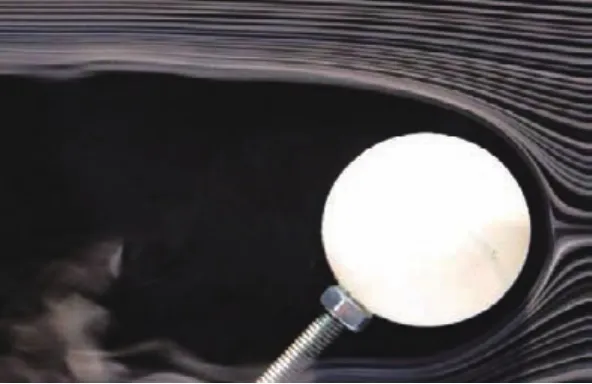
图7 烟流法下显示的流场Fig.7 Flow field under the smoke flow method
2 国内外仿生扑翼飞行器风洞实验研究进展
国外在仿生扑翼飞行器的研究方面起步较早.在仿鸟扑翼飞行器的研究方面,2011年,德国Festo公司研制的SmartBird,采用双段翼,翅膀采用碳纤维做支撑,翼膜为聚氨酯泡沫蒙皮,空气动力效率高达80%[10],在一定程度上验证了双段翼较单段翼具有更好的气动特性.在仿昆虫扑翼飞行器的研究方面,代尔夫特理工大学研制的Delfly Nimble[11],采用四翼X翼型,搭载了立体视觉感知系统[12],拥有悬停能力.哈佛Robert J.Wood教授领导的哈佛大学微机器人实验室研究人员设计的RoboBee能从一开始的受控飞行到学会游泳和停歇再优雅地浮出水面.最近该微型飞行器又取得了新的重大突破:改进后的RoboBee X-Wing[13]长5 cm、重259 mg,其中本体的质量只有90 mg,其余为电池和电子设备的质量.
我国关于鸟类和昆虫的仿生研究起步较晚,研究单位主要有西北工业大学、哈尔滨工业大学和北京科技大学等.现在国内越来越多的科研院所对这方面的研究表现出了浓厚的兴趣,我国在仿生扑翼飞行器的研制方面也做出了不少成果.在仿鸟扑翼飞行器的研究方面,西北工业大学宋笔锋教授团队Yang等研发了一款名为Dove的仿生扑翼飞行器[14],其机身质量不到300 g,但续航时间超过了20 min,并且具有一定的抗风能力;北京科技大学的USTBird仿鸟扑翼飞行器[15]采用两个独立的舵机,能够实现两侧机翼的独立控制,完成滑翔、盘旋等不同的飞行动作,实现15~20 min持续飞行;哈尔滨工业大学深圳研究生院自主研制了一款“凤凰”仿生扑翼飞行器[16],该飞行器翼展2 m,质量仅约 670 g,飞行速度可达 3~8 m·s-1,且具有优良的抗风能力;在仿昆虫扑翼飞行器研究方面,北京科技大学贺威教授团队研发的USTButterfly仿蝴蝶扑翼飞行器,质量仅为90 g,能够模仿蝴蝶的飞行方式进行飞行;北京航空航天大学Zhang和Sun[17]提出了全层流假设,对飞蛾、果蝇和蜜蜂等8种昆虫进行数值模拟研究,在此基础上探索了微型飞行器的飞行原理.
与固定翼和旋翼飞行器相比,影响仿生扑翼飞行器飞行的因素包括扑动频率、飞行迎角、翼型和尾翼形状等.目前受非定常气动设计优化理论与方法不足的影响,现有研究主要是通过风洞实验研究扑动运动参数或形状外形参数对气动性能的影响,以此获得气动特性随设计变量不同的变化规律,并据此来确定仿生扑翼飞行器的设计参数范围.目前风洞被认为是一种飞行器高速发展必不可少的设备,我们要想深入研究仿生扑翼飞行器的飞行机理、研制出更加可靠稳定的仿生扑翼飞行器,进行相应的风洞实验必不可少.在做相应的风洞实验之前,有必要对前人所做的风洞实验进行总结和分析.在2.1、2.2和2.3中,本文将仿生扑翼飞行器风洞实验分为仿鸟扑翼飞行器风洞实验和仿昆虫扑翼飞行器风洞实验两部分进行介绍.
2.1 仿鸟扑翼飞行器风洞实验
仿鸟扑翼飞行器由于其体积较大,载重也相对较大,对携带的电池和机载摄像头等设备的要求不是那么苛刻,因此仿鸟扑翼飞行器是目前仿生扑翼飞行器的研究热点,国内外都有很多机构对此进行了深入的研究.
鸟类的翅膀具有非常复杂的结构,如图8为信鸽的翅膀羽毛结构,由飞羽、覆羽、肩羽、羽干和翼角组成[18].鸟类在飞行时翅膀还具有非常复杂的动作,一般鸟类在扑动翅膀飞行时,都伴随着翅膀完全展开、收拢等动作,且鸟类在不同飞行状态时翅膀扑动频率相差很大.但是仿鸟扑翼飞行器的研制目前还处于初级阶段,还不能做到完全模仿鸟类飞行时的所有动作.目前的研究内容主要关注于如何为飞行器提供更高的升力和推力,包括翅膀的形状与翼型、扑动机构的扑动频率、飞行时的迎角等对飞行器升力和推力的影响,以及在负载能力和电池效率没有得到明显提升的前提下,如何提高飞行器的续航能力.
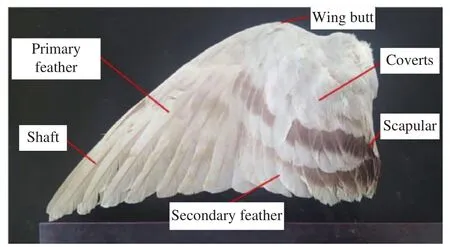
图8 鸟类翅膀结构Fig.8 Structure of a bird wing
2.1.1 迎角、扑翼频率、来流速度对飞行器气动特性的影响
经研究发现,扑翼频率、飞行迎角、来流速度等对仿鸟扑翼飞行器飞行的升力和推力都有很大影响.太高的扑翼频率不利于提高飞行器续航,过低的扑翼频率又可能使得升力不够,而且扑翼频率的确定关系着驱动结构的设计和电机的选型;飞行迎角和来流速度的选择也会影响飞行器的稳定飞行和续航,所以有必要对这三个影响飞行器气动性能的因素进行实验研究.熊超和宋笔锋[3]利用西北工业大学的微型飞行器专用风洞对这三个方面进行了研究.实验采用40 cm翼展的平面机翼,机翼面积为303 cm2,根弦弦长8 cm,整个飞行器重30 g.实验采用控制变量法对扑翼频率、飞行迎角和来流速度三个因素逐个进行了实验研究.该实验所用风洞设备为当时国内唯一的微型飞行器专用风洞,该风洞采用直流式结构,全长只有700 mm,试验段口径为500 mm×500 mm,具有较低的湍流度和较大的风速变化范围.风洞力测量设备采用了西北工业大学自研三分量天平,X轴分量量程为3 N,Y轴分量量程为5 N,俯仰力矩量程为1.5 N·m,该天平在设计时便充分考虑了仿生扑翼飞行器对天平和支撑的刚度要求以及应变梁的输出灵敏性,材料采用了美国进口的预应力超硬铝,并考虑到与模型连接的方便和可靠,将天平和支撑做成了一个整体.经试验测试,该天平具有良好的动态响应性能和较高的精度.另外本试验配置了齐全的采集和控制设备,具有自动调节飞行器迎角、流场风速以及数据的实时采集等功能,图9为熊超和宋笔锋[3]实验所用仿生扑翼飞行器.实验的目的是确定升力、推力随这三个影响因素的变化规律,从而更好地指导以后的飞行器设计.实验最终表明迎角和来流速度是影响升力的主要因素,而扑动频率是影响推力的主要因素.
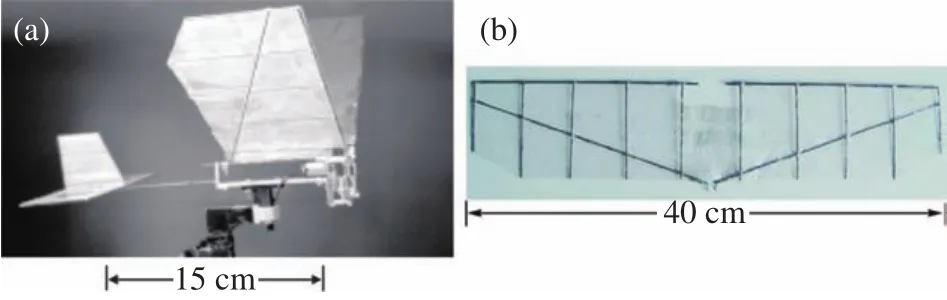
图9 熊超和宋笔锋所用仿生扑翼飞行器和实验机翼.(a)实验用仿生扑翼飞行器;(b)实验机翼[3]Fig.9 Flapping-wing aerial vehicle and the experimental wing used by Xiong C and Song B F: (a) experimental flapping-wing aerial vehicle;(b)experimental wing[3]
昂海松等[19]也对扑翼频率、飞行迎角和来流速度进行了实验研究.实验风洞为南京航空航天大学低紊流度风洞,该风洞采用回流式结构,试验段口径也相对较大,达到0.75 m.实验中力测量设备采用了南京航空大学自研的精微六分量天平,该天平力测量相对误差小于0.06×10-2N,力矩测量相对误差小于0.2×10-2N·cm,该实验数据采集系统采用了高速数据采集卡,最高采集速度可实现每秒采集20000点.另外,熊超和昂海松在实验中使用的飞行器略有不同,昂海松在实验中使用的飞行器翼展略小于熊超在实验中使用的飞行器的翼展,翼展长度为34 cm,且翼尖处为1/4圆形,如图10所示.文献[3]和文献[19]在给出的最终结论上稍有出入,这两篇文献的结论如表1所示,文献[3]和文献[19]实验结论的不同可能来自于实验所用飞行器的不同,也可能是实验参数不同导致的.比如文献[3]测量扑翼频率对升力、推力的影响时,采用的迎角为6°,来流速度为7 m·s-1,而后者采用的迎角为7.5°,来流速度为5 m·s-1.当然也有可能是其他因素,比如文献[3]和文献[19]所用的仿生扑翼飞行器翼型不同.

表1 熊超团队和昂海松团队实验结果展示Table 1 Experimental results of Xiong C’s team and Ang H S’s team
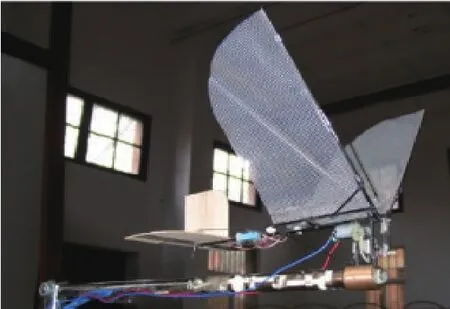
图10 昂海松等实验所用扑翼飞行器[19]Fig.10 Flapping-wing aerial vehicle used by Ang H S’s team[19]
对于两个团队研究成果的差异可能来自于试验时迎角或来流速度不同的猜想,在伊朗谢里夫理工大学2011年的一项实验中得到了验证[20].该实验的内容和上述两个团队的实验内容一致,均为探索扑动频率、迎角和来流速度对飞行器气动性能的影响,但文献[20]对于每个影响因素的研究都做了多项实验,比如在研究扑翼频率的影响时,文献[3]和文献[19]都只做了迎角和来流速度固定为某个值时的一组实验,但文献[20]却做了迎角和来流速度不同组合的多个实验,这就使得伊朗研究团队的实验更加全面深入.图11展示了伊朗研究团队所设计的机翼结构和完成后的机翼平面图.图12为伊朗团队实验所用的仿生扑翼飞行器和扑翼系统在风洞试验段中的示意图.
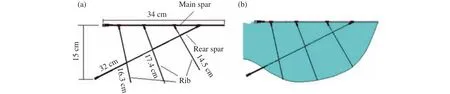
图11 仿生扑翼飞行器翼肋及机翼形状平面图.(a) 翼肋结构;(b)机翼形状平面图Fig.11 Plan view of wing rib and wing shape of bionic flapping-wing aerial vehicle: (a) structure of the wing rib; (b) schematic of the planform view of the wing shape

图12 仿生扑翼飞行器整机及扑翼系统示意图.(a)仿生扑翼飞行器整机;(b)开放试验段风洞中的扑翼系统[20]Fig.12 Schematic of the whole bionic flapping-wing aerial vehicle: (a)the whole bionic flapping-wing aerial vehicle; (b) flapping wing system in the open test section of a wind tunnel[20]
文献[20]研究发现平均升力随迎角呈线性关系增长,随来流速度呈二次函数关系增长,而与扑翼频率弱相关.在扑翼频率对推力影响方面,平均推力值随扑动频率的增加呈二次函数变化,在不同的迎角下总体趋势不变.在扑翼频率对升力影响方面,要分低频和高频来看.对于低扑翼频率,升力随扑翼频率的变化可以忽略不计;对于高扑翼频率,扑翼频率对升力的影响不如来流速度对升力的影响大,扑翼频率的增加只能较小地增加升力.在低攻角时,升力随扑翼频率的增大而减小,基本呈扑翼频率的二次方变化.
2.1.2 尾翼对飞行器飞行性能的影响
鸟类在飞行过程中,通过尾部快速连续移动以保持飞行稳定性,特别是进行俯仰控制.没有它,鸟类几乎不能飞行.在变速风洞中对训练有素的喜鹊和鸽子进行的飞行运动学研究表明,它们的肌体俯仰角和尾翼展开角随飞行速度的增加而减小[21].对家燕的飞行运动学记录表明,尾翼展开角和尾翼俯仰角随飞行速度的变化而变化[22].鉴于鸟类尾翼的重要作用,对仿鸟扑翼飞行器尾翼的研究显得十分重要.
国内方面,熊超[23]在其一项研究中通过对西北工业大学自研飞行器进行有尾翼和无尾翼两种状态的一系列风洞实验和数值计算,总结了尾翼对仿生扑翼飞行器的若干作用.具体来说,包括影响升阻力大小、全机气动焦点的后移和减小飞行时的一些动态特性(飞行时机身的一些沉浮和俯仰运动特性),该研究指出尾翼可以减小20%以上的竖直方向的位移和迎角变化.
此外,李喜喆[24]在风洞中,通过调整尾翼与机身的夹角,得到了尾翼压强分布图,分析了尾翼与机身夹角和升力系数的关系.研究人员发现随着尾翼与机身夹角的逐渐增大,尾翼所产生的升力系数与夹角接近线性增长关系.黄灿等[25]研究了尾翼形状、张开角度及材料柔性三个方面,图13展示了黄灿实验用的椭圆形和燕尾形尾翼.实验结果发现椭圆形和燕尾形尾翼具有更大的力矩,而形状越接近三角形,所受力也越大;张开角度越大,椭圆形尾翼和燕尾形尾翼的力和力矩都增大,但椭圆形尾翼随角度变化更为均匀;随着柔性变形度增大,各个力都减小,但柔性程度对燕尾形尾翼的影响更大.
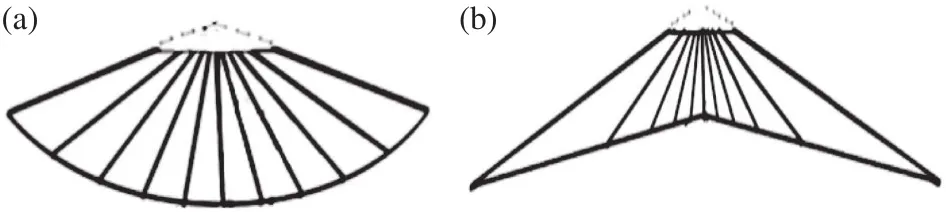
图13 椭圆形和燕尾形尾翼.(a)椭圆形;(b)燕尾形[25]Fig.13 The oval and dovetail tails: (a) oval tail;(b) dovetail[25]
国外也有一些机构进行了尾翼对飞行稳定性的影响的研究[26-28],Lee等[26]用自研仿生扑翼飞行器研究了尾翼对提高仿生扑翼飞行器纵向飞行稳定性的作用,所用仿生扑翼飞行器如图14所示.研究发现:(1)尾翼降低了机体俯仰角的振幅;(2)尾翼使仿生扑翼飞行器向前飞行的平均速度有所增加.结论(1)表明尾翼可以改善仿生扑翼飞行器纵向稳定性;结论(2)提醒我们除了可以通过改变扑翼频率来实现起飞、加速和着陆控制,还可以通过调整周期性尾翼运动的相位来控制起飞、加速和着陆时的平均速度,从而提高稳定性.
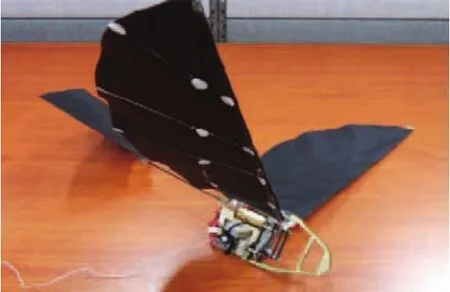
图14 试验用仿生扑翼飞行器整机图[26]Fig.14 The whole bionic flapping-wing aerial vehicle for testing[26]
2.1.3 翅膀翼型对飞行器气动特性的影响
众所周知,真实鸟类的翅膀在飞行时并不是一个完全平直的形状,而是有一定的弧度,并且翅膀在靠近翼根处会向前凸起一定的角度.这两个特点是否对鸟类能够平稳飞行起到作用?起到的作用又有多大?同时,如果把这两个特点应用到仿生扑翼飞行器上,是否会对飞行器的气动性能起到影响?这些都是亟待研究的问题.机翼是产生升力的主要部件,早在1910年,俄罗斯航空之父Zhukovsky就对机翼的翼型进行了研究,发现了翼型对机翼的升阻比特性有着重要的影响[29];Ashraf等[30]研究了不同厚度和弧度的翼型对推进性能的影响;Unger等[31]对海鸥的翼型剖面进行了研究.如今,各个航空发达的国家,如美国、德国、英国等均建立了自己的翼型数据库,而我国至今没有自己的翼型数据库,但是在翼型方面的研究我们从没有停下过脚步.蔡常睿[32]设计制作了一组仿信鸽的翅膀,该组翅膀截取了从翼根10%半翼展位置到翼尖90%半翼展位置的9组翼型模型,用来研究翼型对飞行器的气动性能的影响.图15展示了蔡常睿截取的9组翼型.实验中对比得出了雷诺数在7×104和8×104两种情况下,攻角为4°时不同翼型的升阻比情况,同时分析了单个翼型在不同攻角时的升阻比.
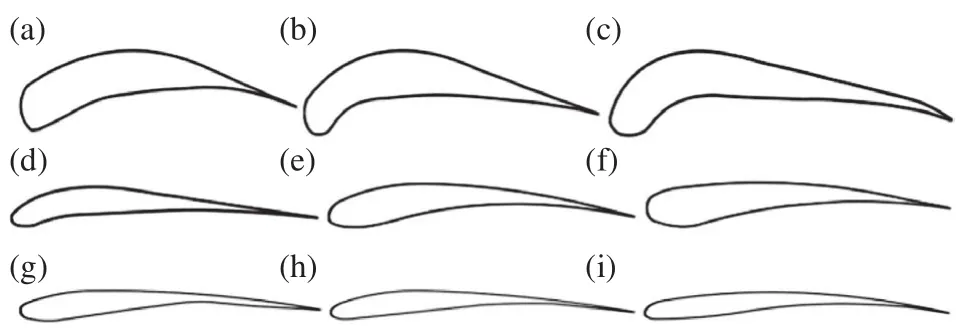
图15 翼展处的翼型截面图.(a)10% 翼长;(b)20% 翼长;(c)30% 翼长;(d)40% 翼长;(e)50% 翼长;(f)60% 翼长;(g)70% 翼长;(h)80% 翼长;(i)90% 翼长[32]Fig.15 Airfoil section at wingspan: (a) 10% chord; (b) 20% chord; (c)30% chord; (d) 40% chord; (e) 50% chord; (f) 60% chord; (g) 70% chord; (h) 80% chord; (i) 90% chord[32]
史继拓等[33]通过观察海鸥翅膀,发现海鸥翅膀前缘向前具有一定的凸起,向上具有一定的弧度.具体结构如图16所示.为了探究这两点对扑翼飞行器气动特性的影响,他们设计制作了三款翅翼:仅前凸翼型、仅上弯翼型和既前凸又上弯翼型,采用三维扫描和逆向工程技术重建了翅翼模型.打印制作后,经过一系列风洞吹风实验,比较分析了三款翅翼翼型机翼表面流场特征以及气动参数变化.研究发现,完全构型仿生机翼(既前凸又上弯的机翼),其升阻比和升力系数都高于仿生翼型平直机翼(仅前凸的机翼),且翼型仿生机翼(仅上弯的机翼)的升阻比都基本在机翼攻角为3°时达到最大值.这与邵立民等[34]在风洞实验中关于翼型弯度对机翼升力、阻力系数的影响结果一致.邵立民等[34]的研究成果中显示,在低速情况下,带弯度翼型机翼升力系数普遍比平板机翼大60%.目前国内大多数飞行器都还是采用仿生翼型平直机翼,蔡常睿[32]和史继拓等[33]的研究成果为仿生飞行器的性能提升和机翼的翼型设计都指明了一条道路.未来应该有越来越多的仿生扑翼飞行器采用翼型仿生机翼,用以提升飞行器的性能.

图16 具有上弯和前凸特征的海鸥翅膀Fig.16 Wings of a seagull characterized by upper bending and anterior protrusion
此外,在仿鸟扑翼飞行器风洞实验方面还有很多研究成果,如邵立民等通过风洞实验[34]研究了机翼平面翼面形状对飞行器气动特性的影响,张亚锋等[35]研究了扑动幅值角对仿生扑翼飞行器气动特性的影响,李康康和陈巍巍[36]研究了不同的扑翼刚度和扑翼频率的组合对仿生扑翼飞行器升力和推力的影响,石成明等[37]、Warkentin和DeLaurier[38]都通过风洞实验研究了串列翼对扑翼飞行器推进性能的影响,付鹏等[39]研究了小范围内扑翼频率和扑翼幅度对推力和功率的影响等.
2.2 仿昆虫扑翼飞行器风洞实验
虽然现在对仿鸟扑翼飞行器的研究依然是一个热点,但是随着微动力与能源系统的研究,人们已经对仿昆虫扑翼飞行器展现出了越来越高昂的热情,特别是昆虫的飞行雷诺数和微型仿生扑翼飞行器的飞行雷诺数相当,使得仿昆虫扑翼飞行器很可能成为仿生飞行器领域的下一个领军者.自从“蜜蜂悖论”现象出现以来,研究人员对小型昆虫的结构、运动学和空气动力学方面表现出了浓厚的兴趣.特别是昆虫具有的悬停能力以及极小的体积,都使得其在执行任务时具有更好的侦察和隐蔽能力.
昆虫与鸟类的主要区别在于翅膀.昆虫可以携带接近于两倍自身体重的物品飞行[40],金晓怡等在一篇研究中就指出这一现象可能与其翅翼的结构密不可分[41].首先昆虫的翅膀不像鸟类一样拥有厚厚的羽毛和复杂的结构,昆虫的翅膀一般分翅脉和翅膜两部分,翅脉做支撑,翅膜相当于蒙皮[42],有些昆虫还会有毛发状的翅翼结构,甚至拥有多对翅膀,图17为某类昆虫翅膀的结构.有学者对昆虫翅膀进行研究发现,其翅膀是变刚度的柔性体[43].
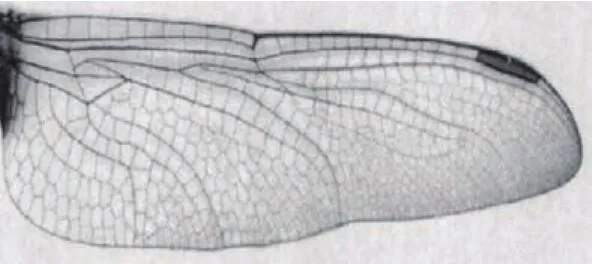
图17 昆翅的结构Fig.17 Structure of an insect wing
由于昆虫体积太小,导致仿昆虫扑翼飞行器对能源和控制器的要求极为苛刻,微型的仿昆虫扑翼飞行器的实验研究难度很大.虽然美国哈佛大学的微型机器人实验室采用压电驱动经过多年研究,成功制作了一款翼展3 cm、高2.4 mm的微型仿昆虫扑翼飞行器[44],但是受负载、微动力与能源系统研究的限制,目前仿昆虫扑翼飞行器实验研究的对象多是蝴蝶和蜻蜓这类稍大些的昆虫.另外,仿昆虫扑翼飞行器的尺寸不是1∶1复刻自然界中的蝴蝶和蜻蜓,往往都是形状相似,而尺寸则是放大了数倍,用来研究其翅膀形状和扑翼频率对于扑翼飞行器气动特性的影响.本节也将着重介绍仿蜻蜓、蝴蝶等昆虫的仿生扑翼飞行器风洞实验.
2.2.1 翅膀形状对飞行器气动特性的影响
自然界中,各种飞行昆虫如蝴蝶、蜻蜓等翅膀形状千差万别,而他们所具有的飞行特征也千差万别.比如,蝴蝶飞行只需很小的扑翼频率就可以飞行,而蜻蜓则要达到更高的扑翼频率才能够使其正常飞行,这之间的差异,是不是由其翅膀形状的不同而导致的?如果是,翅膀形状又对飞行器的气动性能有多大影响?
国外Muniappan等[45]对平面翅膀形状对飞行器气动特性的影响做了研究,实验所用风洞设备为开口式结构,试验段口径仅为350 mm×350 mm.实验采用了一种基于应变片,可同时测量升力和推力的天平,整个天平采用“倒L”结构,升力的测量可以由天平弯道处的应变计算出来.该天平采用的电路设计可以消除弯道附近的轴向推力的相互作用,但是无法消除支架根部升力和推力的相互作用,但是由于升力可测,所以推力可以由计算得出.实验中全部采用仿生翼面形状.如图18所示即为文献[45]实验用的机翼形状,包括蜻蜓、蝴蝶、蜂鸟和鸽子四种翼面形状.实验中的四对翅膀不仅翼面材料和支撑材料相同,而且四对翅膀的翼面面积也相同,最后又通过一种巧妙的方法消除了展弦比(Aspect ratio, AR)对气动力的影响,具体方法为:首先通过实验研究了展弦比对仿生扑翼飞行器气动力的影响,其次通过实验数据对定常空气动力学中展弦比对飞行器气动力影响的公式进行了改进,得到了展弦比对仿生扑翼飞行器气动力影响的经验公式,之后用该公式对四种翼面形状对气动力的影响结果进行了修正,消除了展弦比对气动力的影响.文献[45]研究结果显示,在一个较高的频率上时,昆虫形状的翅膀似乎比鸟类形状的翅膀在升力的表现上更好,并对造成这种现象的原因进行了分析:与固定翼飞机机翼相比,昆虫的翼根弦比翼尖弦小很多,而鸟类的翼根弦比翼尖弦要大,昆虫的这种翅膀形状,使它们具有较高的气动弹性、较小的颤振和发散速度,也使得在相同展弦比和机翼面积的情况下,其升力比刚性机翼更大.
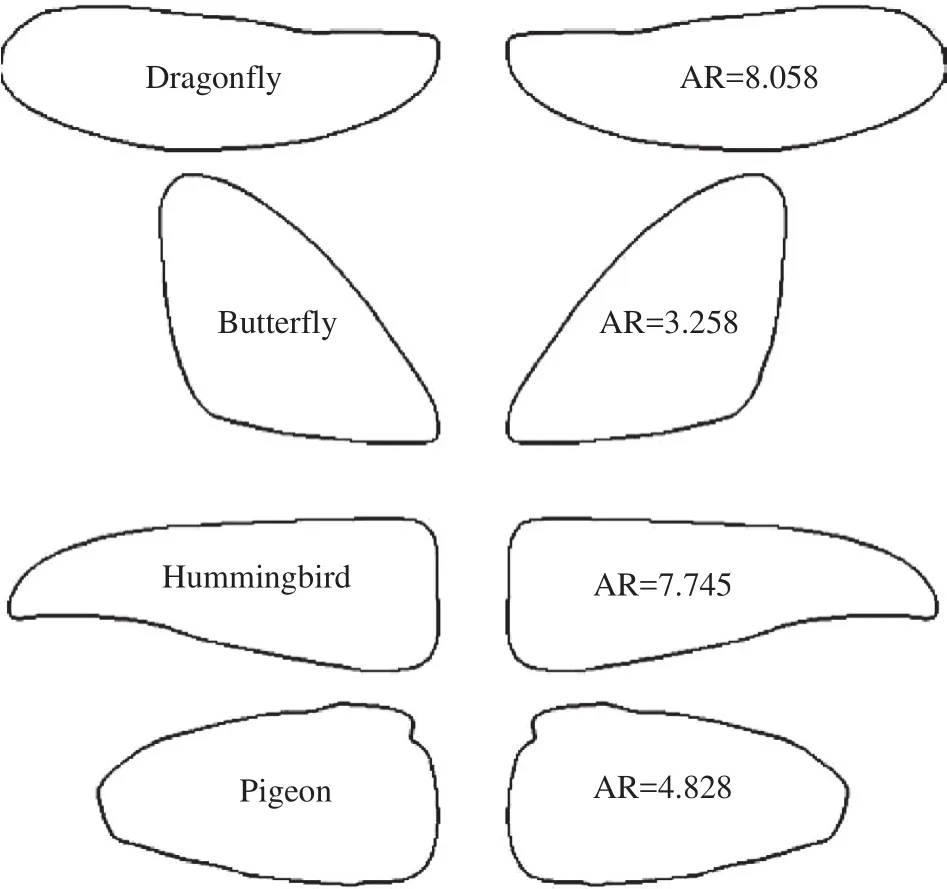
图18 实验所用4种翼面形状Fig.18 Four wing shapes used in the experiment
2.2.2 昆虫四翼结构对飞行器气动特性的影响
昆虫拥有独特的多翼结构.微型飞行器需要在极小的体积下提供尽可能大的升力,昆虫独特的多翼结构可能会为飞行器提供更高的升力.现在已经有很多采用多翼结构的仿生扑翼飞行器被研制出来,也表现出了良好的飞行性能,例如Ryu等组装的一款已经商用的仿生扑翼飞行器[46]和Robert J.Wood领导的团队中Chen等开发的RoboBee[13],两者都是采用的四翼X翼型.后者到目前为止已经推出了多款改进版飞行器,如图19为他们最新推出的RoboBee X-Wing,此时的RoboBee丢掉了电源线,通过太阳能电池提供动力,只要有光源,就能持续不断地飞行.

图19 RoboBee X-WingFig.19 RoboBee X-Wing
国内外都有团队对四翼结构进行研究.国内的研究团队详细分析了四翼扑翼飞行器的扑动初始角、扭转角、扑动频率、风速、机身迎角和机翼柔性等在不同取值下的推力、升力系数的变化规律,最后得出了试验用扑翼飞行器的最佳运动参数[47].国外的日本千叶大学研究团队研究了昆虫的独特四翼结构[48],图20展示了他们实验中所用的四翼结构的扑翼飞行器,飞行器各零件质量已在图中标出,整机质量小于3 g.该团队首先对影响四翼微型飞行器气动特性的因素进行了研究,之后对四翼和两翼飞行器进行了对比.他们设计制作了一个双翼翅膀和一个四翼翅膀,两者均采用聚乙烯材料,四翼飞行器采用X型扑翼结构.研究结果显示,在实际飞行中,俯仰角度大于40°时,四翼飞行器能够产生两倍于两翼飞行器的升力.
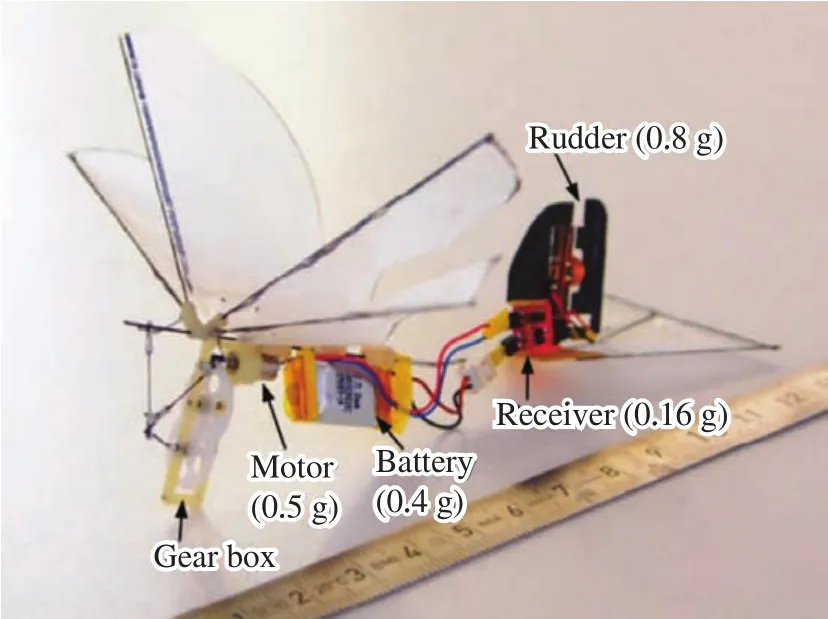
图20 千叶大学四翼扑翼飞行器[47]Fig.20 Chiba University’s four-wing flapping-wing aerial vehicle[47]
2.2.3 翼膜材料、厚度等对飞行器气动特性的影响
除了对昆虫翼膜结构的翅膀形状、数量进行研究外,Yang等[49]还对翼膜厚度、材料、刚度对飞行器的影响进行了实验研究,图21为文献[49]试验中所用翅膀的翼型轮廓.实验对不同材料、不同厚度的翅膀进行了风洞实验,并成功利用实验结论对他们已有的扑翼飞行器“金探子(Golden snitch)”进行了改进.经过改进后的扑翼飞行器不仅性能优于原来的扑翼飞行器,而且续航时间从原来的6 min提高到了8 min.这从一定程度上证明了翅膀采用不同的厚度和材料的组合,可能会对飞行器的性能有影响.

图21 翅膀设计轮廓[48]Fig.21 Contour of a wing design[48]
除此之外,金晓怡等[41]也研究了昆虫的柔性翅结构对仿生扑翼飞行器气动性能的影响.其所用风洞为低速小型风洞,该风洞需要通过手持风速仪测量试验时真实风速,并通过人工手动调节到准确风速,测量柔性翅翼形变所用设备为高速摄像机,并配备了实时频率测试仪.整个实验所用翅翼的前缘梁和翼脉由竹篾制作而成,前缘梁所用竹篾较粗,刚度比较大,而翅脉所用竹篾较细且截面积逐渐变小,以达到变刚度的效果.其实验结果表明翅的柔性变形对昆虫飞行高升力有贡献,柔性翅较之刚性翅能够为飞行器提供更大的升力.图22为该团队设计的变刚度翅膀.
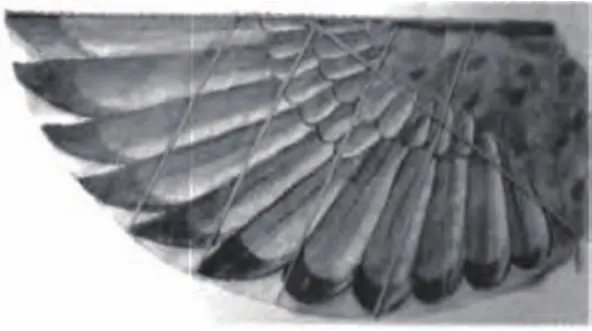
图22 变刚度翅膀[39]Fig.22 Variable stiffness wing[39]
此外,对仿昆虫扑翼飞行器的风洞实验研究还有很多,如Okamoto等[50]通过两种不同类型的风洞实验研究了蜻蜓翅膀的弧度、厚度、表面粗糙度和前缘锐度对机翼气动特性的影响,Vogel[51]通过风洞实验研究了果蝇翅膀升力和阻力随攻角和速度的变化,张福梁[52]通过风洞实验分析了蝇类扑翼产生高升力的原因.
此外,国内外还有团队对鸟类或者昆虫翅膀表面的微观结构对飞行器气动性能的影响进行了研究,包括清华大学团队对鸟羽减阻的研究[53],国外的 Hord和Liang Y[54],Kim 等[55],Levy和Seifert[56]对典型蜻蜓翅膀的独特波纹翼型剖面的研究.
3 结论
本文从仿鸟和仿昆虫两方面详细介绍了有关仿生扑翼飞行器的风洞实验,重点讨论了飞行器各几何参数和飞行参数对仿生扑翼飞行器气动特性的影响,对仿生扑翼飞行器风洞实验有了基础认识.当前,仿生扑翼飞行器正处于加速发展的重要阶段,研究人员希望通过风洞实验对仿生扑翼飞行器拥有更加全面的认识.过去几十年,风洞在固定翼和旋翼飞行器的研发中扮演了重要角色,特别是对早期飞行器的研究方面起到重要作用.仿生扑翼飞行器作为一种新型飞行器,与其他种类飞行器研究体系存在差异,现有的研究理论应用在仿生扑翼飞行器上时存在诸多困难,风洞实验是较为真实有效的研究手段,但是目前针对仿生扑翼飞行器的风洞实验研究还缺乏系统性.基于此,在对仿生扑翼飞行器风洞实验更进一步的深入研究中,本文建议可以考虑以下几个方面:
(1)对翅膀的蒙皮材料以及如何模仿鸟类的羽毛结构进行研究.现有的仿生扑翼飞行器一般都是采用聚酯薄膜做蒙皮,蒙皮表面光滑,无任何其他涂层.但现实中的鸟类翅膀表面往往具有凹凸不平的沟壑,且有羽毛覆盖.Festo的仿狐蝠飞行器BionicFlyingFox的表面就采用了气密薄膜和氨纶织物的组合物,整个蒙皮表面都布满了蜂窝结构,达到了很好的飞行效果.
(2)多段翼飞行器的研究.真实的鸟类飞行时都不只是单段翼的上下扑动,一般都是可折叠的多段翼结构.为了使扑翼飞行器拥有更高的仿生度,更好地模仿鸟类飞行,未来的仿生扑翼飞行器的研究很有可能会更倾向于多段翼或者主动变形机翼的研制.多段翼的各段翼之间的夹角以及展开与收拢等动作对飞行器气动特性的影响,都值得通过风洞实验进行更深一步的研究.
(3)尾翼对飞行器气动性能的影响.鸟类的尾翼具有多种作用,但是目前关于仿生扑翼飞行器的尾翼的研究还没有得到足够的重视,大多数风洞试验还是对飞行器的翅膀进行研究.要想提高仿生度和飞行器性能,尾翼的面积、形状等对飞行器气动性能影响的风洞实验研究应该得到重视.
(4)多翼飞行器研究.目前越来越多的研究者开始关注仿昆虫扑翼飞行器,仿昆虫的多翼扑翼飞行器展现出相对于单翼扑翼飞行器更加优良的气动特性.其中在研究多翼飞行器翅膀布局时,需要考虑很多变量,如双翼之间的间隙距离、各翼的相位角、甚至是在恶劣条件下机翼的耐久性等,都需要通过风洞实验来得到相关数据.
