双导航模式果园运输机器人设计与试验
2022-04-07毛文菊王小乐杨福增刘志杰汪宗阳
毛文菊 刘 恒 王小乐 杨福增 刘志杰 汪宗阳
(1.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100;2.农业农村部苹果全程机械化科研基地, 陕西杨凌 712100; 3.上海一坤电气工程有限公司, 上海 200233)
0 引言
苹果收获是一种季节性很强且劳动密集型的作业,该环节的作业量约占苹果生产所有作业量的40%[1-2],但收获过程的采后运输作业仍采用传统的人和运输车互相配合的方式[3]。果园生产逐步向现代化和智能化方向转变,研发适用于果园的运输机器人是果园现代化、智能化发展的必然趋势[4-5]。
自主导航技术是果园运输机器人智能化作业的关键。在果园运输机器人导航技术研究方面,MARK等[6]采用多层激光识别猕猴桃果树行的方法,实现了机器人行内直线行驶,但未体现地头自主转弯这一技术难点;MARCEL等[7]开发了轮式自主移动果园运输设备,该设备通过2D激光检测果树行两端设定的固定点获得果树行地头转弯信息,并根据这些信息规划固定路径实现自动导航,但在行间起步、停车时仍需要人工按键完成;国内学者[8-13]优化和改善了果园运输设备的机械性能,但对该类设备自主导航技术的相关研究未见报道。
本研究针对现有果园运输机器人导航模式单一,自主作业时无法实现任意点的起步、停车,智能化程度偏低等问题,设计一种双导航模式果园运输机器人,以实现行人引领导航和定点导航。以果农的安全为前提,机器人可以跟随果农在果园任意点起步、停车实现运输作业,一旦满载则可以自主行驶至目标点,由地头的果农卸果后再自主返回至果园内果农所在位置,开始下一轮的跟随运输作业,提高果园运输作业的智能化程度。
1 系统设计
1.1 硬件系统设计
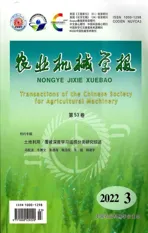
双导航模式果园运输机器人的整体硬件由行人引领导航模块、定点导航模块、控制模块、运动模块和动力模块等5个模块组成,其结构如图1所示。
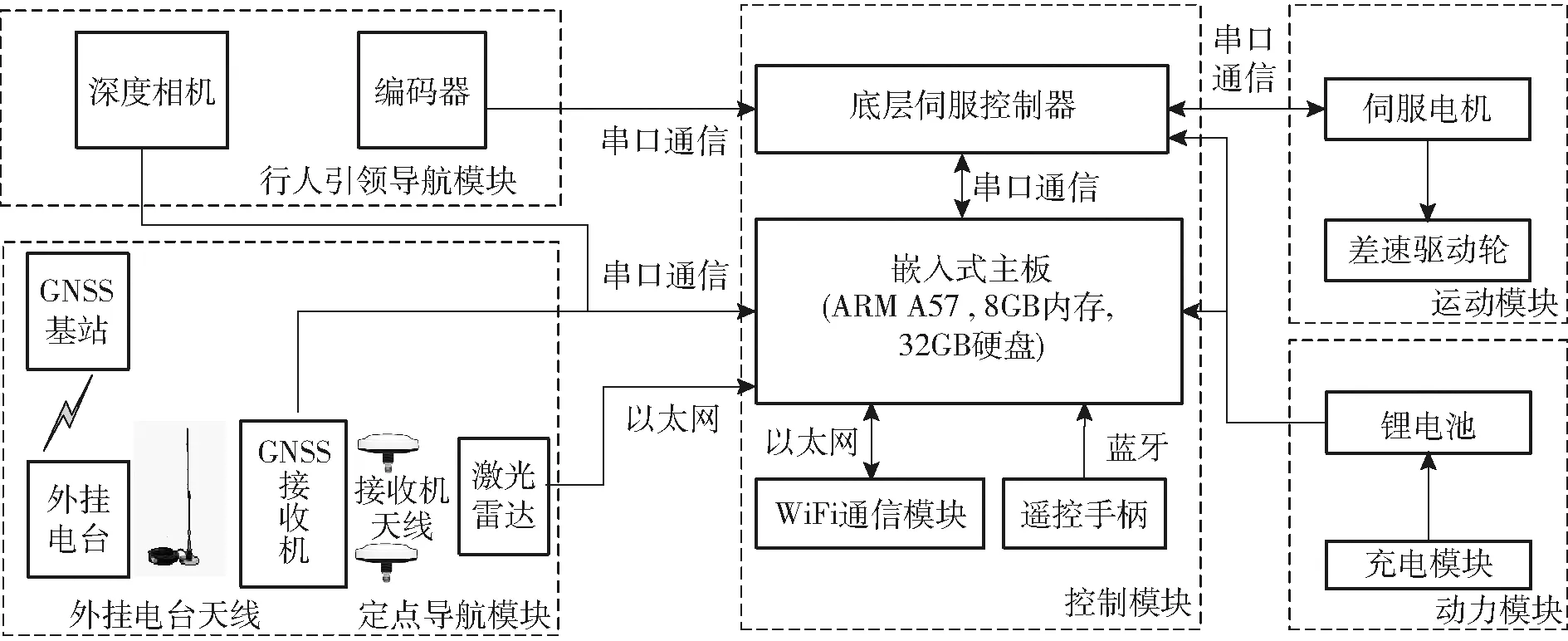
图1 机器人整体硬件结构图Fig.1 Overall hardware of robot
(1)行人引领导航模块
双导航模式果园运输机器人的行人引领导航模块由Intel RealSense D435i型深度相机和编码器构成。D435i型深度相机由1个红外点阵投射器、1个RGB相机和2个红外相机组成,其中红外点阵投射器补齐灯光,RGB相机采集彩色图像的信息,两个红外(Infra-Red)相机测量图像距离相机的深度信息,为机器人提供相机前方的图像信息和图像像素点距离机器人的深度信息。D435i深度相机架设在机器人中心正前方,激光雷达的下方。
编码器安装在机器人底盘驱动电机上,根据电机转速为行人引领导航模块提供机器人当前时刻的速度信息。
(2)定点导航模块
双导航模式果园运输机器人的CGI-410型定点导航模块(华测)由实时动态全球导航卫星定位系统(Real time kinematic-global navigation satellite system,RTK-GNSS)和RS_Lidar-16激光雷达(速腾)两部分构成。RTK-GNSS导航基于差分定位的原理,即基站通过电台和天线将定位经纬度定位坐标信息传递给移动站,移动站接收到RTK-GNSS的载波相位以及基准站的信息后进行及时处理,最后得到高精度的定位结果。其中移动站包括移动站接收机、RTK-GNSS双天线和外挂电台,移动站接收机安装在运输机器人装载箱下方,RTK-GNSS双天线分别架设在机器人正中心前后端,双天线连线的基线与真北方向的夹角为机器人当前航向角(方向)。所采用的CGI-410型 RTK-GNSS接收机内置MEMS(Micro-electro-mechanical system)陀螺仪与加速度计,可进行RTK-GNSS和惯性组合导航。即当移动站在苹果园中受果树等遮挡物影响丢失信号时,可采用惯性导航提供的姿态和位置信息,适用于运输机器人在果园自主导航。为保证该定位导航模块能进行组合导航,需要在空旷位置处对该定位导航模块进行“绕8字”校准后再使用。
激光雷达安装在机器人正中心前方,具有水平方向±180°,垂直方向±5°的扫描范围, 0.38°水平角分辨率,150 m测距量程和20 Hz的扫描频率,可实现对果园障碍物信息的高效获取,保证运输机器人定点导航的安全性。
(3)控制模块
双导航模式果园运输机器人的控制模块如图1所示,整个机器人由嵌入式主板进行控制,嵌入式主板采用ARM A57处理器,8 GB内存,32 GB硬盘。远程监控平台借助WiFi通信模块与嵌入式主板连接,可远程操纵运输机器人并监控其工作状态。此外,遥控手柄采用蓝牙与嵌入式主板通信,根据遥控按钮的方向和力度,向嵌入式主板发布调整底盘的转向和行驶速度指令。嵌入式主板通过串口向底层伺服控制器发送速度控制信息,底层伺服控制器通过串口通信的方式向嵌入式主板反馈底盘实时速度信息。
(4)运动及动力模块
双导航模式果园运输机器人的履带式底盘具有较好的地形适应性和越障能力以及转向灵活等优点。苹果园运输机器人采用履带式差速驱动的运动模式,左右驱动轮由独立的伺服电机进行控制,驱动轮与伺服电机之间连接有减速器,最大行驶速度为1.2 m/s。运输机器人工作时底层伺服控制器通过控制伺服电机的转速使运输机器人运动。
采用48 V锂电池为运输机器人提供动力,充电电源电压为220 V。
双导航模式机器人各模块硬件安装的3D示意图和实物图如图2所示,改装后运输机器人车身长1.175 m,宽0.835 m,高0.470 m,额定负载200 kg。

图2 双导航模式果园运输机器人整体结构图Fig.2 Overall structure of dual navigation mode orchard transport robot1.RTK-GNSS定向天线 2.装载箱 3.履带底盘 4.屏幕 5.充电口 6.急停按钮 7.WiFi天线 8.RTK-GNSS定位天线 9.D435i深度相机 10.激光雷达
1.2 软件系统设计
双导航模式果园运输机器人的软件系统由命令交互层、信息处理层和执行层共3个模块构成,软件系统结构如图3所示。

图3 双导航模式果园运输机器人软件系统结构图Fig.3 Dual navigation mode orchard transport robot software system structure diagram
命令交互层是基于Linux系统的模式选择程序,可根据不同的需求选择运输机器人的工作模式,目前可选择的工作模式有两种:行人引领导航模式,根据设定的领航员手势命令,启动行人引领导航功能,即机器人会在视觉范围内跟随第一个向相机挥右手的行人行走;定点导航模式,机器人根据用户输入的目标点到达果园内任意位置。信息处理层为基于ROS (Robot operating system)的行人引领导航及定点导航程序,在行人引领导航模式下实时获取领航员目标点的信息并调整跟踪运动的速度,在定点导航模式下实时获取机器人位姿、障碍物信息并调整自主运动的速度。执行层为基于Linux系统的移动平台控制,将信息处理层向底层伺服控制器输出的速度信息,转换为电机转速信息,实现采后果实的自主运输。
2 自主导航功能实现原理
双导航模式果园运输机器人的自主导航功能主要通过软件系统的信息处理层模块来实现,该信息处理层模块的软件运行如图4所示。

图4 信息处理层软件运行流程示意图Fig.4 Information processing layer software operation flow diagram
在行人引领导航运输模式中有人体姿态估计、深度信息对齐、提取目标点和目标跟踪4个步骤,人体姿态估计借助了OpenPose[14]开源算法包获取人体实时运动姿态的骨骼关键点信息,缩短软件开发周期,节省开发成本;再通过骨骼关键点计算得到人体中心点,匹配中心点图像信息和深度信息,获取带有深度信息的目标点;最后利用比例-积分(Proportional integral,PI)控制实现目标跟踪功能。定点导航自主运输模式有D-A控制和障碍物判别2个步骤,机器人匀速朝目标点方向前进时,根据RTK-GNSS提供位姿信息不断调整到达目标点的方向,且根据有无障碍物时判别是否急停,最终输出机器人下一时刻的速度信息,直至到达目标点。
2.1 行人引领导航
在行人引领导航运输模式中,实时定位目标是顺利实现导航的核心难点,尤其在果园多人采摘场景下,机器人需要辨认出领航员。目前基于视觉的方法在领航员的定位以及多人环境中分辨领航人员方面具有很大的潜力[15],与其他视觉识别人体姿态算法相比,OpenPose[16]是基于深度学习的实时多人二维姿态估计算法,并以卷积神经网络为框架开发了开源库,能为实现运输机器人行人引领导航节省大量的开发时间。因此,本文行人引领导航模式的开发是将相机采集的RGB图像先通过OpenPose算法获得多人2D人体姿态估计后,利用深度信息对齐获取多人2D人体姿态图像的深度信息,再根据特征手势(挥动右手)在多人场景中提取出领航员姿态的中心点,最后根据该中心点的位置信息进行目标跟踪控制实现行人引领导航。
(1)人体姿态估计
OpenPose先通过卷积神经网络得到人体特征图,分别通过CMP (Part detection confidence maps)得到25个关节点(如颈、肩、腕、腰、膝、踝等)的置信度,PAFs(Part affinity fields)得到25个关节点在骨架中的走向(关节点位置和方向的2D矢量),即肢体的置信度。为减少计算量,利用贪婪分析算法(Greedy parsing algorithm),对置信度信息进行编码和存储,再采用图论法对关节点和肢体的置信度信息进行二分法匹配(Bipartite matching),并使用匈牙利算法(Hungarian algorithm)得到关节点和肢体最优化的匹配,即将同一个人的关节点连接起来,最终将每个人都拼接成由25个关节点组合而成的人体骨架。详细的实施步骤参见文献[14,16]。
(2)深度信息对齐
通过人体姿态估计输出的是多个人的RGB彩色图像信息,由于D435i相机采集RGB彩色图像与Infra-Red红外图像的镜头位置不同,所以这两者数据的空间坐标系是不同的,需要将RGB的图像彩色视频流与Infra-Red图像的深度流对齐得到RGB彩色图像像素点的深度信息。即通过颜色流和深度流不同的分辨率,获取深度信息的深度比例单位,删除图像中深度距离超过最大值的像素,根据颜色和深度的框架集,将深度框与颜色框对齐,获取对齐的帧并验证两帧是否有效,最后用该信息渲染图像。
(3)提取目标点
通过在人体姿态估计中得到的多个由25个关节点组合而成的人体骨架,经过深度信息对齐后,多个25个关节点组成的人体骨架RGB图像具备了深度信息。如图5a所示,其中第2、3、4个骨架关键点分别为人体的右肩、右肘和右手腕,第1、5、6骨架关键点分别为人体的脖颈、右髋和左髋。当在图像中出现多个人时,设置第1个在视觉相机识别范围内并抬起右手挥动的人为运输机器人跟踪目标。然后提取该组人体骨骼的重心关键点1、5、6,并在1、5、6这个三角形中寻找重心点作为目标点,最后输出目标点的当前位置信息

图5 行人引领导航原理图Fig.5 Pedestrian led navigation schematic

(1)
式中xtargert——机器人实时观测到的目标点横坐标
ytargert——机器人实时观测到的目标点纵坐标
x1、x2、x3、x4、x5、x6——人体骨架关键点1、2、3、4、5、6的横坐标
y1、y2、y3、y4、y5、y6——人体骨架关键点1、2、3、4、5、6的纵坐标
(4)距离-方向(Distance-angle,D-A)目标跟踪控制

(2)
(3)
式中vt——编码器测量的机器人t时刻线速度
ωt——编码器测量的机器人t时刻角速度
vo——机器人行驶时设置的初始线速度
ωo——机器人行驶时设置的初始角速度
Δt——时间差
(4)
式中rmin——目标跟随距离
θj——从开始到时刻t机器人旋转角度
kpv——运输机器人PI控制器的线速度比例增益
kpω——运输机器人PI控制器的角速度比例增益
kiω——运输机器人积分控制参数
运输机器人t+1时刻目标跟踪的运动距离和角度计算式为
(5)
式中 Δxt+1——t+1时刻目的点的横坐标
Δyt+1——t+1时刻目的点的纵坐标
上述行人引领导航功能算法的实现流程如图6所示。

图6 行人引领导航功能实现流程图Fig.6 Implementation flow of pedestrian led navigation function
2.2 定点导航
目前RTK-GNSS导航定位技术在大田中的应用已经基本成熟[17-18],实现了复杂农田环境下农业机械自动导航[19],田间试验作业精度可达到厘米级[20]。随着卫星定位精度的不断提高,有学者尝试将该技术应用在果园环境中,如熊斌等[21]研制的BDS果园施药机,ZACHARY等[22]研制的果园自动收获作业,试验结果表明基于RTK-GNSS的机器人能满足果园作业要求。考虑到果园遮挡对RTK-GNSS定位精度有一定的影响,从而影响运输机器人定点导航的精度,本文根据JJF 1118—2019《全球定位系统(GPS)接收机(测地型和导航型)校准规范》,在果园中对运输机器人CGI-410型定位导航模块的精度进行测量,在机器人距离基站5~50 m的试验区内,每间隔5 m选取差分定位点测量点,每次测量时间间隔30 min,如图7所示,测试结果表明:在果园试验区基于CGI-410型定位导航模块的果园运输机器人静态定位漂移不明显。因此,本文设计运输机器人在果园定点导航的位姿信息由CGI-410型定位导航模块直接提供。

图7 基于CGI-410型定位导航模块的果园运输机器人静态定位漂移测试结果Fig.7 Static positioning drift test results of RTK-GNSS-based orchard transport robot
目前基于RTK-GNSS的割草机器人[23]、喷药机器人[24]、巡检机器人[25]导航时,其作业路径通常是固定的,即机器人以作业轨迹为追踪对象,沿着设定好的路径行走,并在路径两端停车。但机器人的位置会根据果园内果农实际作业情况发生变化,从而导致运输机器人作业时的停驶点不同,作业路径无法固定。如图8所示,果园内有多个不同的停驶点,果园内果农可随意按照箭头运动,机器人根据果园内果农运动的方向,停驶在不同停驶点上(如3、5、7、10),再从这些不同的停驶点返回至地头1时,会使机器人有4种不同长度的行驶路径(如行驶路径1、2、3、4)。而果园环境无法大规模铺设类似于植物工厂物流搬运机器人[26]行走的轨道。因此,为保证运输机器人作业时到达给定的任意目标点,本文以目标点为追踪对象,运输机器人基于RTK-GNSS导航采用距离-方向(Distance-angle,D-A)跟踪控制的方法,输入由RTK-GNSS静态时测得的目标点经纬度信息后,先后计算当前点和位置点的方向差和距离,并以该方向差和距离与设定阈值的关系为判断条件,使机器人到达给定的任意目标点,并在导航过程中加入障碍物判别的步骤,避免碰撞行人。
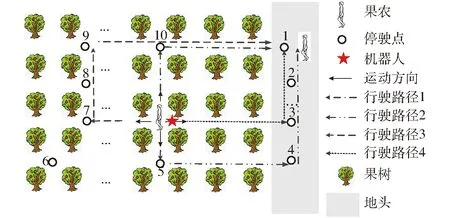
图8 运输机器人在果园作业场景示意图Fig.8 Schematic of transport robot operating in orchard
(1)距离-方向(Distance-angle,D-A)控制
如图9所示,用RTK-GNSS测量提供的世界大地坐标建立坐标系BOL,运输机器人在该坐标系上的位置点坐标唯一,点坐标由经度坐标B和纬度坐标L组成。先通过经纬度坐标计算目标点和机器人当前位置点连线与正北方向的夹角θtarget,并根据θtarget与当前位置点在正北方向夹角θtarget(由RTK-GNSS根据机器人实际情况测量得到)角度差的绝对值θ,调整机器人的角速度(设定机器人逆时针旋转方向为正),使机器人当前位置点方向与目标点所在方向一致。其中目标点与当前位置点连线与正北方向的夹角θtarget的计算式为
图9 定点导航距离-方向(Distance-angel,D-A)控制原理图Fig.9 Distance-angel (D-A) control schematic for fixed-point navigation
(6)
式中Btarget——目标点的经度坐标
Ltarget——目标点的纬度坐标
Bcurrent——当前位置点的经度坐标
Lcurrent——当前位置点的纬度坐标
式(6)的4个方程分别对应图9a、9b、9c、9d。
再参考文献[27]中的两点经纬度坐标间距离求解公式(该公式将地球视为一个正球体,多用于无法进行大运算量的场合中),计算机器人当前位置点与目标点之间取整后的距离S
(7)
式中 []——取整函数
式中6 378 137为地球半径,单位m。为减少UTM坐标转换的计算量,提高程序运行速度,在计算机器人的距离和方向差信息时均采用RTK-GNSS提供的经纬度信息直接计算。
定点导航时分别以目标点方向θtarget与当前位置方向θcurrent差值绝对值θ,当前位置点与目标点之间的距离S(以机器人车身长度为参考,设定S判断阈值为1 m),先后作为定点导航时输出角速度和线速度的判定条件。根据表1执行定点导航参数设定规则,当角速度ω为正时,机器人逆时针旋转,角速度ω为负时,机器人顺时针旋转。
如表1所示,先计算目标点方向θtarget与当前位置方向θcurrent的角度差绝对值θ,当|θtarget-θcurrent|≤1°时,角速度ω为0 rad/s,当|θtarget-θcurrent|>1°时,判断机器人转动的方向,机器人按照设定的角速度参数行驶,使机器人当前位置点与目标点方向的角度差|θtarget-θcurrent|≤1°。再计算位置点与目标点之间的距离S,当S≤1 m时,机器人线速度v为0 m/s,当机器人S>1 m时,机器人按照设定的线速度v开始行驶。若在运输机器人追踪目标点的过程中,出现|θtarget-θcurrent|>1°时,则采用角速度参数修正方向,直至运输机器人到达目的点。

表1 定点导航参数设定规则Tab.1 Fixed-point navigation parameter setting rules
(2)避障
为减少安全隐患的发生,获取激光雷达垂直方向±3°,水平方向±90°,扫描距离在[0.15 m, 50 m]的信息,并将该范围划分为多个等分区域。如图10所示,当等分区域中任何一个区域内有物体(红色星号)遮挡,则雷达扫描距离小于1 m即判定存在障碍物,输出速度为0 m/s,机器人急停;反之机器人继续行走。

图10 避障原理图Fig.10 Obstacle avoidance schematic
3 果园运输试验
3.1 果园环境
选取位于陕西省渭南市白水县杜康镇西北农林科技大学白水苹果实验站西400 m处非标准果园,该果园的面积约1 hm2,果园内种植了14行生长15年左右的红富士苹果树,苹果树行间距为4 m左右,苹果树株距为3 m左右,高约为3 m,苹果树单行长178.1 m。如图11所示,部分果树树干的周围地面上长有杂草。试验时间为2020年8月24日—9月5日,此时为果实成熟期,果园内果树枝干交叉,部分结果的果树枝干因受重力影响距离地面较近,尚未摘取苹果的果树,树下沿着果树行方向的地面铺设反光薄膜,用于苹果上色。为保证运输机器人顺利通行,选择园内枝干距离地面约为1.2 m的果树行进行试验。

图11 果园试验环境Fig.11 Orchard test environment
3.2 行人引领导航试验
运输机器人在果园中的行人引领导航试验分为两步,先对运输机器人在多个目标场景下顺利跟踪领航员进行测试,再对运输机器人跟随领航员行间作业时的目标跟踪误差进行测试。试验参考ISO 15623—2013《运输信息和控制系统标准》和果园行株距,将目标跟踪的安全距离Ds设为1 m,目标距机器人最大距离的阈值Dmax设为5 m。且在测试行人引领导航时,发现机器人目标跟踪效果最好的行驶速度为0.5 m/s,因此设定机器人在跟随领航员的初始速度为0.5 m/s。
为测试在果园多目标场景下能准确识别出领航员,参考文献[28-29]对运输机器人在多目标场景下识别领航员设计试验,如图12a所示,分别在果园天晴、多云、傍晚3组不同光线条件下,运输机器人目标跟踪范围内(5 m)出现多个行人时,领航员在距离机器人1 m处向相机挥动右手后,机器人识别出挥动右手的领航员(红色星号)并跟随其行走,直至机器人跟随领航员走完一行跨行进入下一行结束,其中机器人跟随领航员行走时其他行人的位置和运动状态为随机选择。每组试验重复测试3次,试验视频由架设在机器人深度相机上方的摄像头进行第一视角录制,最后参考文献[30]计算目标识别准确度和目标识别精度。
(8)
(9)
式中Ttp——实际为领航员并识别出领航员的样本
Ttn——实际为行人并识别出行人的样本
Tfn——错误识别出行人的样本
Tfp——错误识别领航员的样本
参考文献[31-32]对运输机器人跟随领航员行间作业时的目标跟踪误差设计试验。如图12b所示,在行人引领导航模式中,分别在果园晴天、多云、傍晚3组光线条件下,测试在果园环境中领航员非匀速地运动结束后,运输机器人与领航员之间Dt的变化过程。每间隔5 m领航员停驶后,测量一次机器人前方相机与领航员当前位置的直线距离Dtarget,最后根据Dtarget和Ds得到Dt,根据设计的试验步骤重复3组记录Dt值。机器人跨行跟随行人作业时,行人沿着固定轨迹行驶,机器人以0.5 m/s跟随,行人每移动1步(约0.8 m)测量1次Dtarget,行人共计移动10步,试验步骤重复3次记录Dt值。

图12 果园运输机器人行人引领导航试验示意图Fig.12 Schematics of transport robot orchard pedestrian led navigation experiment
运输机器人在果园作业时的行人引领导航试验场景如图13所示(①~⑧为目标动态识别与跟踪的顺序,橘色虚线框为领航员,黄色点划线框为其他行人),在不同光线条件下机器人能够在多个行人中识别出视觉范围内的领航员(向相机挥右手示意的行人),并跟踪领航员向前行走,且不受旁边突然经过的行人干扰,先后经过旁边的行人,顺利进入下一个视觉识别范围,继续跟踪领航员行走,直至完成测试。

图13 不同光线条件下行人引领导航试验场景Fig.13 Pedestrian led navigation test scenarios under different lighting conditions
(1)多目标场景下领航员识别
果园多目标场景下识别领航员的试验结果如表2所示,对比不同环境条件下的跟踪准确度和跟踪精度,发现机器人在视觉范围内的目标跟踪准确度和跟踪精度都能达到100%,但晴天时机器人目标跟踪反应较慢,会出现停顿现象,导致运行的时间较长。这是因为晴天时光线过强,强光导致深度相机投影图像较差,从而使图像处理的速度变慢,但在多云或傍晚时,相机受强光影响小,特别是在傍晚光线较弱时,机器人反应速度最快。

表2 多目标场景下的领航员识别试验结果Tab.2 Experimental results of navigator identification in multi-target scenarios
(2)机器人目标跟踪误差
运输机器人跟随领航员果园作业时的目标跟踪误差结果如表3、4所示。从表3中可以看出,机器人以0.5 m/s速度行驶时,行人停驶后机器人的目标跟踪误差平均值及标准差均小于9 cm和4 cm。从表4中可以看出,机器人以0.5 m/s速度行驶时,行人停驶目标跟踪误差的平均值及标准差均小于6 cm和3 cm。即能够在安全的基础上,满足行人引领导航机器人运输的需求。横向对比表3、4相同速度下不同距离的停驶点,发现采样距离越短跟踪误差越小。纵向对比表3、4中相同速度下多次目标跟踪误差及其标准差,跟踪误差会随着试验次数增多而增大,这可能是因为行人运动速度不同,而在目标跟踪控制中对编码器提供的数值进行了积分,导致累积误差增大。
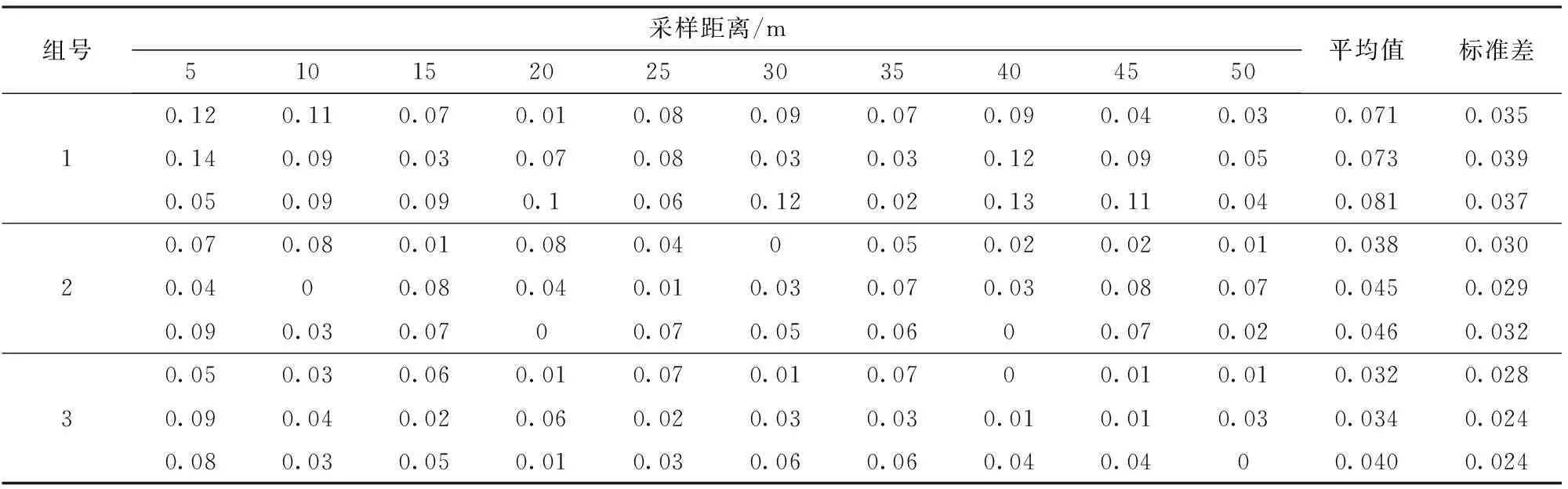
表3 行间作业时目标跟踪误差Tab.3 Target tracking error in inter-row transportation m

表4 跨行作业时目标跟踪误差Tab.4 Target tracking error in interline turn transportation m
3.3 定点导航试验
定点导航试验主要是用于测试在果园内,当果农随机输入指定目标点后,采用D-A控制方法机器人能顺利到达指定目标点。且在定点导航过程中存在障碍物时,依然能正常到达目标点。该试验分为两部分,先测试定点导航的目标跟踪功能,再测试避障功能。参考文献[32-33]对运输机器人的定点导航运输功能设计了试验,果园试验场景如图14a所示,试验步骤示意图如图14b。设定机器人在定点导航模式下以0.5 m/s自主行驶,根据果园内果树生长情况,随机地选择多个目标点,使机器人实时计算当前位置点到目标点的位姿信息,利用D-A控制到达给定目标点,机器人到达目标点的先后顺序为A1、B1、B2、A2、A3、B3、B1、A1,重复试验3组,记录运输机器人到达给定目标点的位置信息。
为保证机器人自主运输时避免与行人等障碍物发生碰撞,参考文献[31]设计了定点导航避障试验,果园试验场景如图14c所示,试验步骤示意图如图14d。试验选取在机器人行驶路径上每隔5 m出现一次行人(常见障碍物),共设置4次,当机器人检测到障碍物停驶后再移开障碍物使机器人继续行走,直至到达目标点。在相同路径上重复进行3组试验,每组试验机器人共停驶5次。

图14 运输机器人果园定点导航试验Fig.14 Transport robot orchard spot navigation experiment
(1)多个目标点定点导航试验结果
选用绝对误差和相对误差来评价多点导航的试验结果[30],先计算3组试验每次试验之间的绝对误差均值和标准差,结果如表5所示,再计算3组试验相对误差的平均值和标准差,结果如表6所示。

表6 定点导航相对误差Tab.6 Relative error in fixed-point navigation m
由表5、6可知,机器人果园定点导航的绝对误差及其标准差分别小于7 cm和0.5 cm。相对误差及其标准差分别小于13 cm和1.5 cm,能够满足果园采后运输的需求。分析8个定位点3组试验的绝对误差的平均值和标准差以及相对误差的平均值和标准差,纵向对比8个定位点的相对误差和绝对误差,发现当两定位点之间距离较远时,导航误差变化明显。对照图15中机器人实际行走的轨迹,认为出现这种现象的原因可能是没有考虑机器人在果园中出现的滑移,缺少对过大横向偏差的限制,从而导致机器人长距离行驶的横向偏离较大,而机器人在果园跨行行驶转向时再次加大了这种横向偏差。
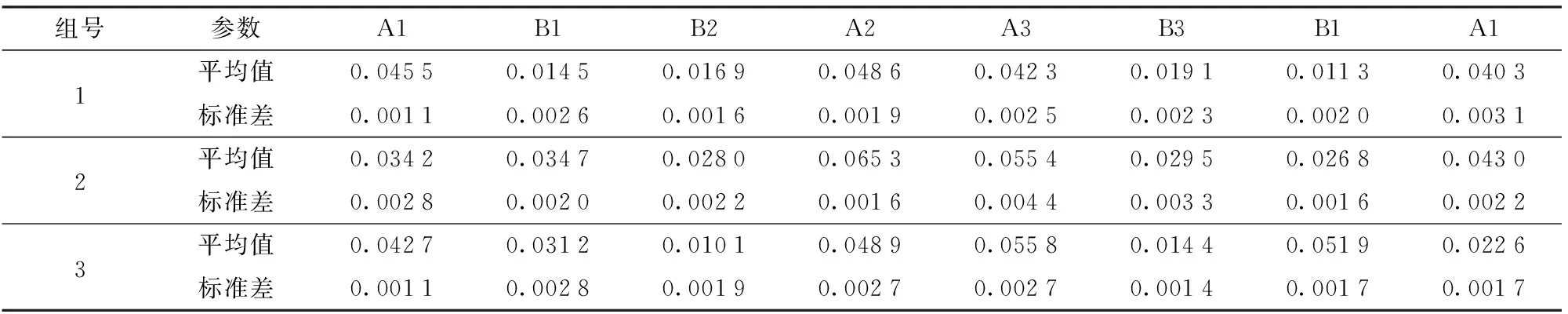
表5 定点导航绝对误差Tab.5 Absolute error of fixed-point navigation m
(2)定点导航避障试验结果
试验结果如图15所示,机器人在设定有障碍物的路段上能安全避障,即停在原地不同,当移走障碍物后机器人继续驶向目标点,且在机器人行驶时横向偏差会随着航向不断变化逐渐减少,直至到达目标点。其中机器人行驶在路径中间时的横向偏差最大,停驶在目标点的航向偏差变化最大。分别计算3组试验中机器人行驶路径与理想路径的横向航向偏差均值、标准差,结果如表7所示。

图15 避障试验结果Fig.15 Obstacle avoidance experiment results
从表7可以看到,机器人行驶路径与理想行驶路径间的横向偏差的均值、标准差分别小于56 cm和0.54 cm,航向偏差均值和标准差分别小于8°和1.6°。这表明机器人能够在有障碍物的环境中,采用D-A控制和急停避障的方法安全地到达给定目标点,满足运输机器人果园自主运输的需求。纵向对比3组试验在相同停驶点的横向和航向偏差,发现最后一组的数据最小,这可能是因为重复行驶过的道路较为平顺,利于机器人依赖D-A控制到达目标点。

表7 位姿偏差Tab.7 Position deviation
4 结论
(1)针对现有果园采后运输设备智能化程度偏低的问题,设计了一种行人引领导航和定点导航的双模式小型果园运输机器人。
(2)果园行人引领导航试验表明,该运输机器人在苹果园中根据设定手势执行行人引领导航功能时,在多人场景下能正常识别领航员,跟踪领航员的误差平均值及标准差均小于9 cm和4 cm,可以满足机器人在果园跟随行人运输果实或物资的需求。
(3)果园定点导航试验表明,该运输机器人采用D-A控制方法在苹果园中进行定点导航时,到达不同目标点的绝对误差及标准差分别小于7 cm和0.5 cm,相对误差及标准差分别小于13 cm和1.5 cm,可以满足机器人在果园自主运输果实或物资定点导航的需求。
(4)果园定点导航避障试验表明,该运输机器人在苹果园行内行驶时,能及时停驶实现安全避障(常见障碍物——行人),且行驶路径与理想路径间的横向偏差和航向偏差均小于56 cm和8°,可以满足机器人在果园自主运输果实或物资安全避障的需求。