基于Sentinel-3 OLCI影像的渤海透明度遥感反演研究
2022-04-06姜玲玲王龙霄高思雯岳建权
姜玲玲,王龙霄, 2,王 林,高思雯,岳建权
1. 大连海事大学环境科学与工程学院,辽宁 大连 116026 2. 国家海洋环境监测中心海洋遥感技术室,辽宁 大连 116023
引 言
海水透明度是海洋生态环境监测的重要指标,能够直接反映水体的浑浊程度,与海水的光学性质、漫射衰减系数、太阳辐射度等均有着密切的关系。 在渔业方面,可根据海水的透明度判断鱼群数量,预测鱼群的活动范围;在航海方面,透明度的表现形式为等直线加分册设色法,用以辅助航行,保障安全;在环境评估方面,海水透明度是评估赤潮,富营养化程度以及海洋污染的重要指标,是环境调查中不可或缺的环节。 海洋透明度的遥感反演研究对人们深化海洋认识、合理开发和利用海洋资源、保护海洋环境以及了解海洋初级生产力等均具有重要意义。
1865年,意大利天文学家Pietro Angelo Secchi发明赛克盘(Secchi disk)用以测量水体透明度(secchi disk depth,SDD)[1],其过程为: 白昼光透过海水照射到白色圆盘上,再经过散射、反射等物理过程达到人眼观测的最大能见度作为水体的透明度。 自此,赛克盘被广泛使用,目前仍作为野外透明度测量的主要方法。 薛宇欢[2],高磊[3]等人利用多年积累的实测数据资料,总结了我国海域的透明度分布特点及时空变化特征。 但野外现场测量耗费大量人力物力,且无法满足对广域海区的长时间动态监测,遥感技术的发展,逐渐弥补了野外测量工作的缺陷,成为海洋监测工作的主要手段。
透明度遥感估算模型发展至今主要分为两大类。 利用现场数据与遥感数据建立统计关系的经验模型;以光在水体中辐射传输理论为基础,建立现场透明度与水体固有光学参数的半分析模型,或通过辐射传输方程计算水体组分的半分析模型。 随着国内外众多学者将遥感技术应用于水体透明度研究,该领域也得到了广泛关注与发展: Zeng等[4]基于实地测量透明度与遥感反射率,开发了一种新型半分析算法,并将其应用于地球静止海洋彩色成像仪(GOCI),在浑浊水体中表现良好;周毅等[5]利用资源一号02D卫星通过半分析算法对官厅水库进行透明度估算,呈现出较高的反演精度;Lee等[6]开发了一种反演透明度的新型半分析算法,并应用于Lasndsat 8影像,可为湖泊与河口提供高分辨率的透明度产品;禹定峰等[7]基于黄东海透明度数据与MODIS遥感反射率建立了透明度三波段反演模型;张春桂等[8]利用MODIS与福建近岸海域海水透明度实测数据建立了台湾海峡海水透明度的估算模型。 综合来看,在二类水体透明度的反演研究中取得了一定的研究成果。
2016年,欧空局发射了搭载海洋和陆地色彩成像仪(ocean land colour instrument,OLCI)的新一代海洋水色卫星哨兵3A(Sentinel-3A),该传感器空间分辨率为300 m,具有21个波段,波长范围为400~1 020 nm,卫星赤道重访时间3.8 d。 2018年,同样搭载OLCI水色传感器的哨兵3B(Sentinel-3B)升空,形成双星观测模式,对全球海洋重访周期为1.9 d、陆地为1.1 d。 Sentinel-3 OLCI传感器较其他水色传感器在产品质量、波段数量、空间分辨率以及数据获取的便捷性方面均有大幅度提升。
目前Sentinel-3 OLCI在我国海域的应用尚处于初期阶段,利用Sentinel-3 OLCI反演我国海域透明度的相关研究还鲜有报道。 以渤海为研究区,首先分析OLCI波段等效遥感反射率与实测透明度的相关性,并建立渤海透明度单波段、波段比值及混合波段的遥感反演模型,通过验证确定最佳模型,最终利用OLCI时间序列影像对渤海的水体透明度进行反演。 本研究为有效提取渤海透明度的信息提供有力参考与理论依据。
1 实验部分
1.1 研究区(包括站位分布情况)
渤海(北纬37°07′—41°0′,东经117°35′—121°10′)是我国北部的半封闭型内海,由辽东湾、渤海湾、莱州湾、中央海盆和渤海海峡组成,水深较浅,平均水深18 m,最深处为83 m。 渤海三面被陆地环绕,大陆径流较强,海湾内水流不易与外部进行交换,同时沿岸有近百个港口,生活污水与工业废水的排放造成了严重的海洋污染。 三部委为此联合印发《渤海综合治理攻坚战行动计划》,经过近两年的综合治理,渤海水质已有明显改善,但对渤海环境进行常态化的监控仍具有重要的意义。
本研究现场数据来自2013年—2020年不同季节期间的多个外业调查航次,共计358站次,站位分布如图1所示。
1.2 实测数据
透明度测量采用直径30 cm的透明度盘,按照“GB/T 12763.2—2007海洋调查规范第2部分: 海洋水文观测”规定进行观测。 在甲板背光侧将透明度盘置于水中,下降到肉眼刚好看不到的深度,再提至隐约可见,记录当时绳索标记值作为透明度深度。 现场光谱数据使用美国ASD双通道地物光谱辐射计,采用水面之上法测量,其光谱范围为350~2 500 nm。 仪器观测平面与太阳入射平面的夹角为135°,仪器与海面法线的夹角为40°,可避免绝大部分的太阳直射反射,并减少船舶阴影的影响。 从各站位点分别采集标准板辐亮度、水体辐亮度以及天空漫散射辐亮度,并按式(1)计算,得到现场水体的遥感反射率Rrs

图1 渤海海域采样调查站位点及卫星匹配点分布Fig.1 Distribution of sampling stations
(1)
式(1)中:Lsw为水体辐亮度;r为水-气界面漫散射光反射率,一般取0.028,海面平静时可取0.026;Lsky为天空漫散射光辐亮度;ρp为标准板反射率;Lp为标准板辐亮度。
本文旨在实现Sentinel-3 OLCI传感器对渤海海区透明度反演,因此需针对该传感器的波段设置进行波段响应函数[式(2)]运算。
(2)
式(2)中:Rrs(Bandx)为Sentinel-3 OLCI传感器Bandx波段等效遥感反射率;Rrs(λ)为ASD光谱仪获取的现场遥感反射率;Fs(λ)为日地平均距离处大气层外太阳辐照度;Sx(λ)为Bandx波段的光谱响应函数,可从NASA Ocean Color下载(https: //oceancolor.gsfc.nasa.gov/docs/rsr/rsrtables/)。
1.3 遥感数据
OLCI传感器基于中分辨率成像光谱仪(MERIS)开发,优化后相比较MERIS传感器改进了7个光谱波段,可观测到沿海地区的海洋水色,传感器向西倾斜,尽可能弱化太阳反射耀斑的作用[9]。
结合现场数据采集时间,下载2017年6月14日、9月19日、9月23日OLCI Level 1 EFR(full resolution top of atmosphere radiance)遥感影像进行透明度反演结果验证,同时下载2020年全年无云渤海卫星影像进行渤海透明度时空变化特征研究。 影像均来自于欧洲航天局(ESA)官方网站(https://coda.eumetsat.int/)。
卫星与实测验证数据的时空匹配要求为: 以测量点的地理位置为中心,选取周围3 pixel×3 pixel区域内所有有效点平均值作为该地理位置的遥感反射率反演值,并要求有效点周围点位的有效像素百分比η需满足η>50%,否则作为无效点排除。 同时规定3 pixel×3 pixel区域内所有像素的平均值Nmean与标准偏差σ的取值范围,若超过平均值±1.5σ,则不考虑该像素值。 本工作的时间匹配窗口设置为±3 h。 筛选后共10个站位点满足时空匹配要求。
卫星接收到的光学信号中包含着大气层顶部的反射光,但水面的反射率通常较低,因此需将光学信号进行大气校正处理以甄别水面信号。 ESA针对哨兵系列卫星提供免费处理影像的SNAP (sentinel application platform)软件,其中包含多种利用辐射传输模型模拟建立的大气校正方法。 针对哨兵三号卫星,本研究采用C2RCC(Case-2 regional coast colour)算法对OLCI影像进行大气校正处理,该算法基于MERIS与神经网络算法(neuro network)开发,在二类水域的研究中得到广泛应用与认可[10-11]。
此外,经大气校正处理后的影像需进行几何校正处理,利用地面控制点和几何校正数学模型来校正非系统性因素产生的偏差,将卫星影像投影到平面,使其符合地理投影系统,并进行重采样,设定空间分辨率为300 m。 最后,根据渤海经纬度矢量图,进行区域剪裁,仅保留研究区的影像,对异常值进行剔除后,进行遥感应用。
1.4 精度评价
通过OLCI传感器特征波段的遥感反射率与现场透明度数据之间的Pearson相关系数(r) [式(3)],确定模型选用波段,采用数学回归方法建立水体透明度反演的经验模型,并通过MATLAB软件采用最小二乘法确定模型参数。 为消除建模时产生的异方差问题,将原始透明度数据进行了对数处理。
(3)

反演水体透明度的精度评价指标选择平均相对误差(mean relative error,MRE)和均方根误差(root mean squared error,RMSE)。 两者表达如式(4)与式(5)
(4)
(5)
式(5)中:dm为第m个实测值;dp为对应的第p个遥感反演值;n为样本数。
2 结果与讨论
2.1 现场光谱
遥感反射率是对水体中各物质信息的综合反映,根据图2可见渤海海水光谱具有明显的二类水体光谱特征。 遥感反射率从350 nm开始逐渐升高,在580 nm处受细胞散射与叶绿素a吸收较弱的共同作用,出现明显光谱反射峰,遥感反射率范围为0.002~0.045 sr-1;之后随着波长的增加,遥感反射率不断降低,在680 nm处叶绿素进行光合作用释放能量,光谱出现较弱的反射峰,遥感反射率在0.000 1~0.037 sr-1之间;随后遥感反射率呈现下降趋势,受泥沙后向散射的影响,在810 nm左右再次出现明显反射峰,遥感反射率范围介于0.000 1~0.038 sr-1。
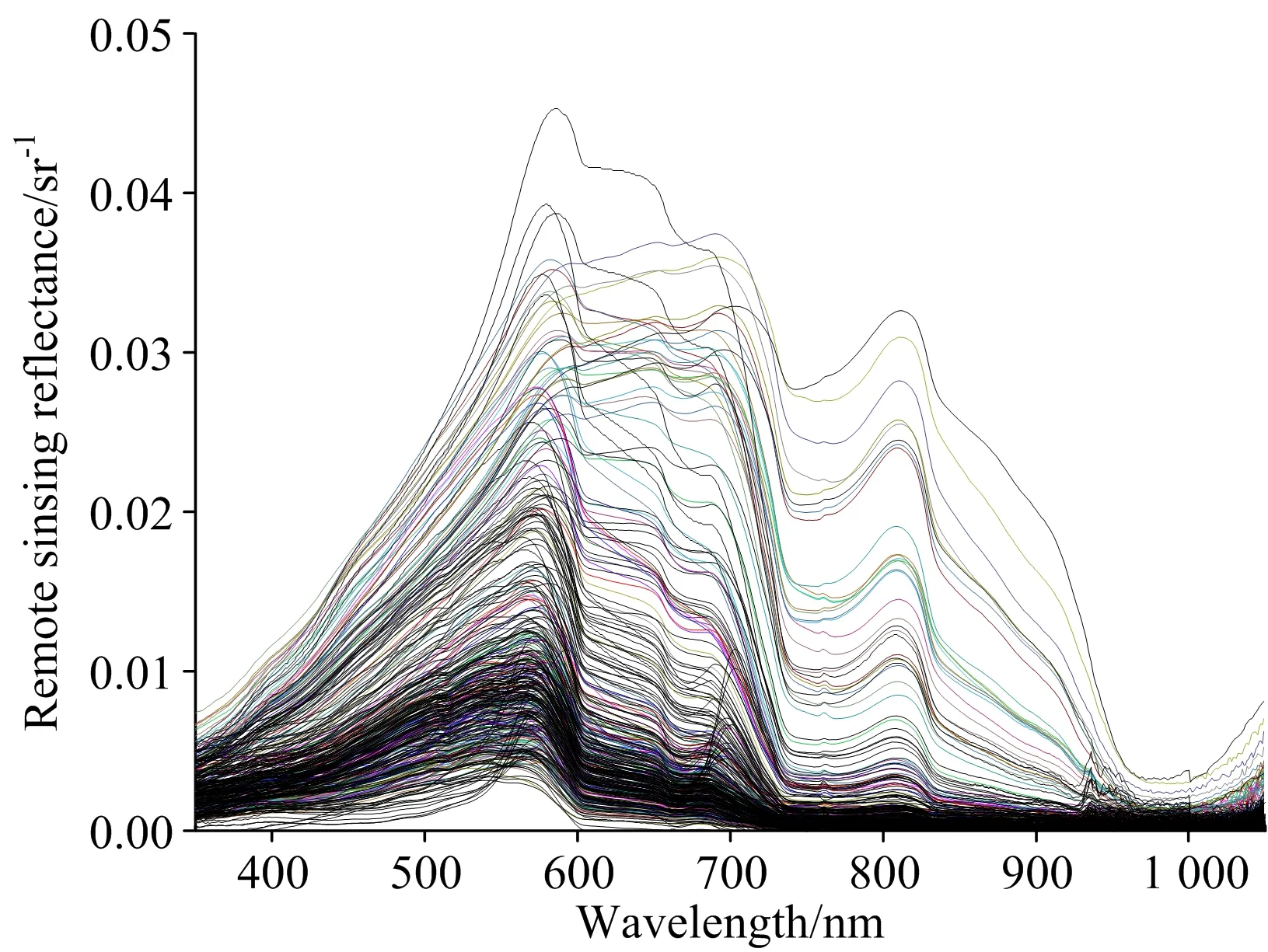
图2 各站位水体光谱曲线Fig.2 In situ Rrs spectra
2.2 透明度与OLCI中心波段相关性分析
根据式(2),结合OLCI的波谱响应函数,将现场遥感反射率转换为OLCI中心波段等效遥感反射率,并与现场实测透明度进行相关性分析,拟合结果如表1所示。 可见两者呈现负相关关系,主要由于浑浊区域的透明度较小,悬浮物浓度较大,导致遥感反射率的数值较高,相关系数介于-0.5~-0.7之间。 其中最高的两波段为绿光波段B6(560 nm)与红光波段B7(620 nm),分别为-0.692和-0.664。 当光照射到透明度盘表面时,一般仅剩下单色光。 Jerlov[12]指出,在清洁水体中蓝光波段(430~480 nm)作为主导,而在湖泊与近岸水体中主导波段向红绿光波段迁移。 本研究结果也与该结论相符。 波段比值法可以在一定程度上减少大气校正以及水体的二向反射问题,同时可提高光谱信号的强度。 目前大多数卫星的叶绿素业务算法均为波段比值法,如应用于SeaWIFS的OC4算法;MODIS的OC3M算法等。 因此,本工作也采用波段比值法,将可见光内不同的波段进行组合,与透明度进行相关性分析;如表2所示,可见相关系数较高的波段组合中均有B7波段,相关系数均在0.9左右,再次验证了红光与透明度的关联性更为紧密。

表1 中心波段遥感反射率与透明度的相关性分析Table 1 Correlation between Rrs and SDD at central band

表2 波段组合与透明度的相关性分析Table 2 Correlation analysis between Rrs combination and SDD
2.3 OLCI影像大气校正结果分析
利用与卫星数据时空同步的现场遥感反射率数据,验证OLCI影像经大气校正后的遥感反射率结果,由图3可知实测遥感反射率与Sentinel-3 OLCI的遥感反射率一致性较高,两者之间的R2为0.95,RMSE为0.000 53 sr-1,MRE为31%。 各波段大气校正结果如表3所示,在620与665 nm处大气校正的结果相对其他波段较差,MRE的值分别为35.73%和37.97%,其余波段MRE的值均小于30%。 该结果充分体现了C2RCC大气校正算法的精确性与可靠性,表明可利用该大气校正方法进行下一步的透明度遥感反演应用。
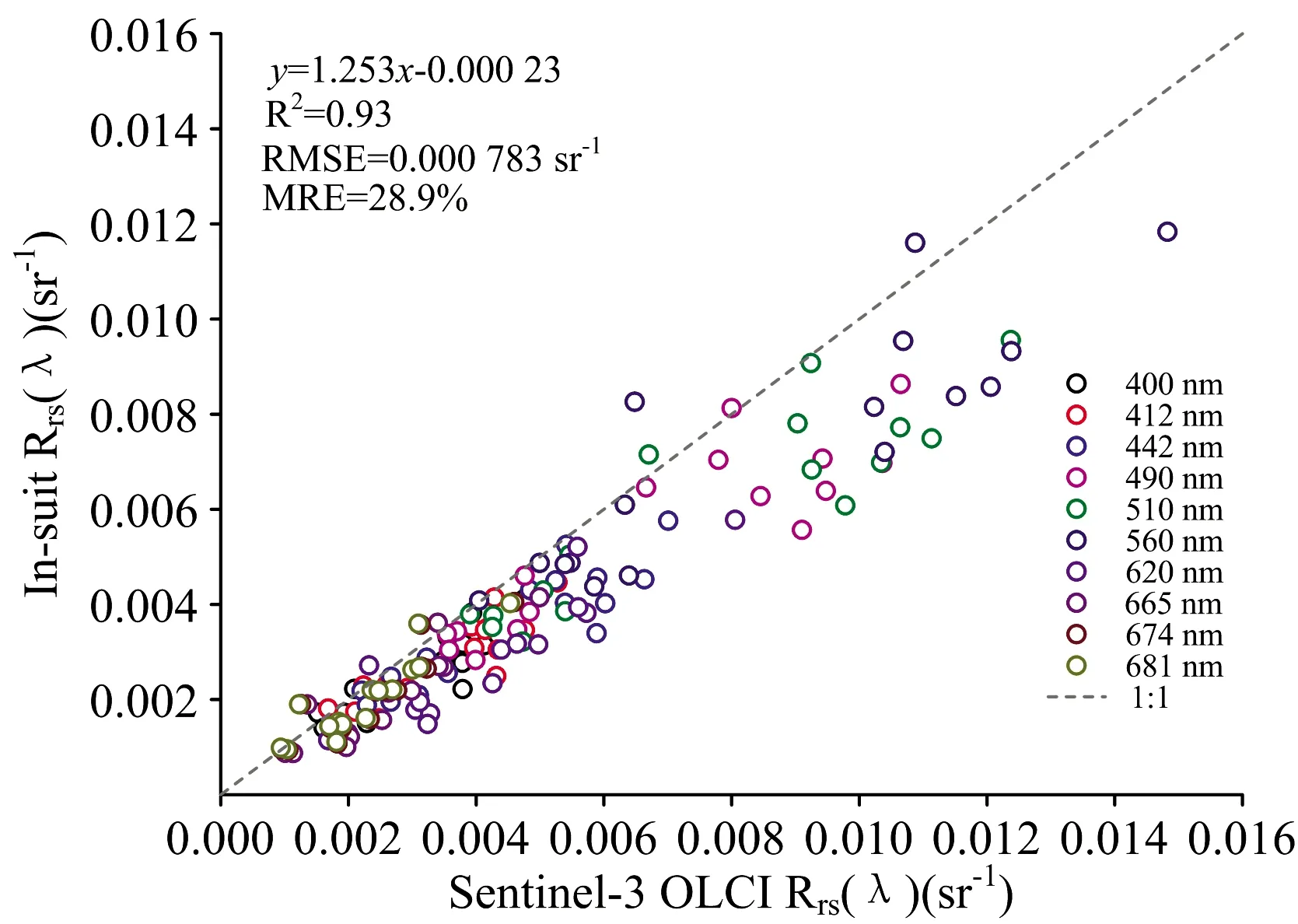
图3 实测遥感反射率与Sentinel-3 OLCI遥感反射率对比图Fig.3 Comparison of in situ Rrs withSentinel-3 derived OLCI Rrs
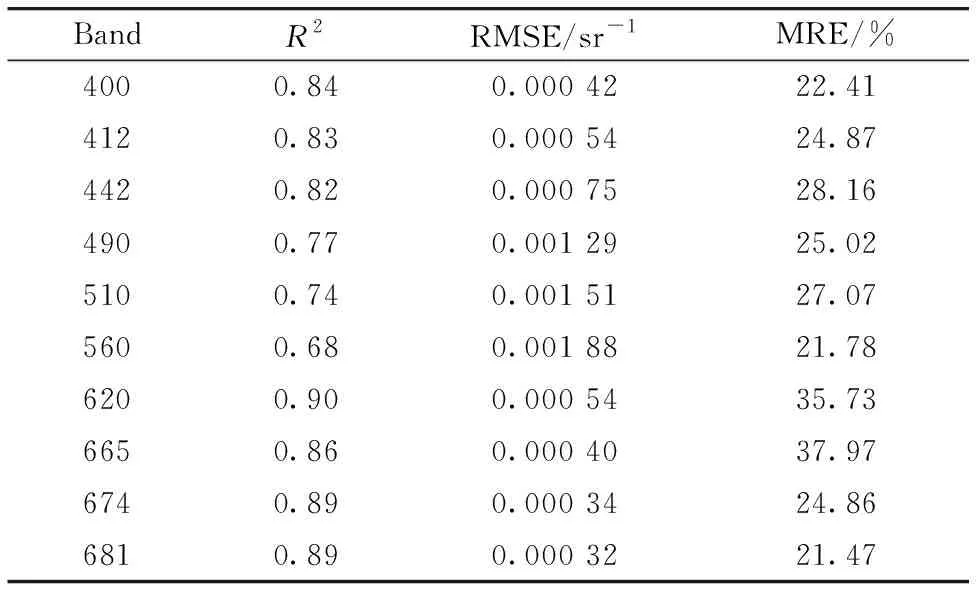
表3 各波段大气校正结果Table 3 Atmospheric correction results for each band
2.4 透明度反演模型的建立
根据上述相关性结果进行中心波段的筛选,最终选取B5—B10波段与lgSD建立经验模型。 并利用卫星同步站位点数据进行透明度反演模型的精度验证(详见表4与表5),结果表明: 在单波段模型中,以B7(620 nm)作为参量建立透明度反演模型的反演效果最佳,在其二次项模型中R2高达0.72,RMSE为0.4 m,MRE为19.35%;波段比值模型中以510/620 nm为参量的一次项透明度反演模型反演效果最佳,其R2为0.56,RMSE为0.519 m,MRE的值为18.68%;根据单波段与波段比值反演效果,选取B5(510 nm),B6(560 nm)和B7(620 nm)进行混合波段模型构建与反演,发现利用B6和B7为敏感因子建立的透明度反演模型效果最佳(图4),透明度反演值与实测值均匀分布在1∶1线两侧,R2为0.68,MRE为15.93%,RMSE为0.48 m。 丛丕福[13]等基于MODIS数据对辽东湾海水透明度进行了反演,发现利用667 nm波段建立的单波段遥感反演模型具有良好的反演效果,其反演结果平均相对误差为13%。 比较而言,本研究范围相对广阔,以560和620 nm建立的混合波段模型反演精度相对更高,对渤海海域的透明度反演更具有良好的适用性。

表4 透明度经验模型精度验证结果表Table 4 Validation results of empirical transparency model
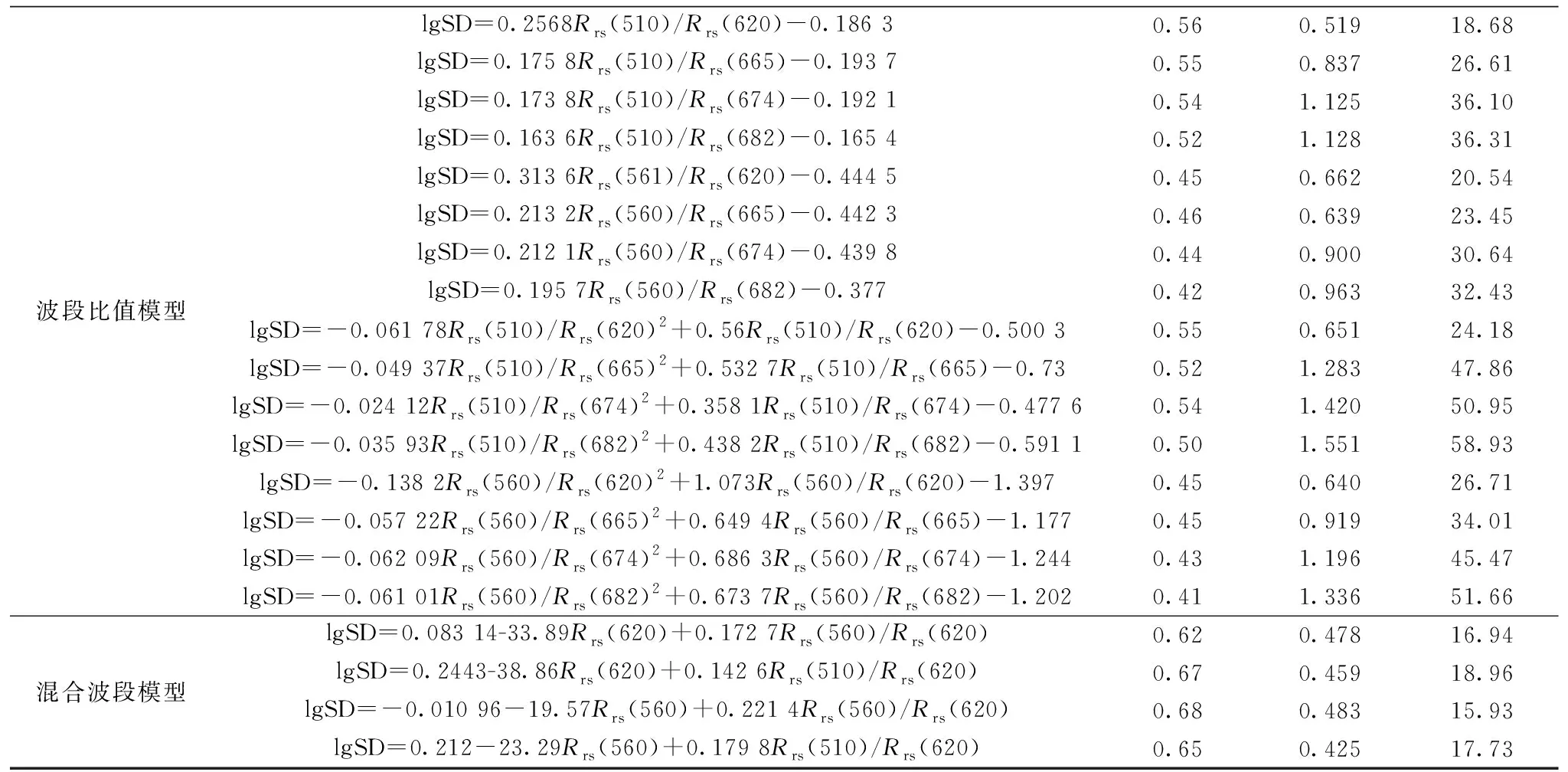
续表4

表5 卫星匹配站点透明度反演结果Table 5 The result between SDD estimated and in situ SDD
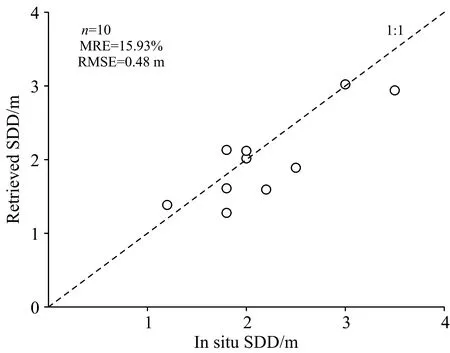
图4 透明度实测值与反演值Fig.4 Comparison between in situ SDD andSentinel-3 OLCI retrieved SDD
2.5 渤海透明度时空变化分析
在上述研究基础上,利用最佳反演模型结合2020年OLCI时间序列影像,对渤海透明度进行反演研究,获得2020年渤海透明度月均遥感产品,如图5所示,透明度变化趋势如图6所示。 研究结果表明: 渤海水体透明度存在明显的区域性与季节性变化差异。 在夏季7、8月最高,透明度最大值可高于9 m,该季节平均风速2~3 m,风速较低、风期较短且悬浮物浓度低,对透明度的影响也比其他季节相对较小;透明度在冬季1、2月最低,最大值仍低于2 m,该季节平均风速达7~8 m·s-1,受海浪作用悬浮物浓度也相对较高。 此外,渤海海区透明度的空间变化趋势呈现沿岸区域较低,中部区域较高;其中在秦皇岛附近海域透明度要高于其他沿岸区域,因该海区附近岸线属砂质海岸,且该位置较其他海区更为开阔,在该海区滦河入海对其带来的影响相对其他海区河流入海的影响较小。 渤海湾、莱州湾与辽东湾水体透明度全年较低,因三湾海岸线属淤泥质海岸,且分别为海河、黄河与辽河入海口,大量悬浮物、有机物与陆源物质被携带入海,三湾周围城市群较多,产生的生活废水、工业污水因地理位置原因,会长期徘徊于三湾内。 中央海盆的透明度在一年间的变化最为明显,变化区间在0.5~4 m。 渤海海峡透明度整体呈现由北向南逐渐降低,由西向东逐渐增高的趋势。 该海区透明度趋势与渤海海峡海底及周边地形走势相通,由北向南海底深度变小,庙岛群岛与山东半岛城市群均位居于渤海海峡南部,受自然地理与城市因素的影响,渤海海峡北部透明度高于海峡南部,由渤海海峡进入黄海后透明度会大幅度提高。
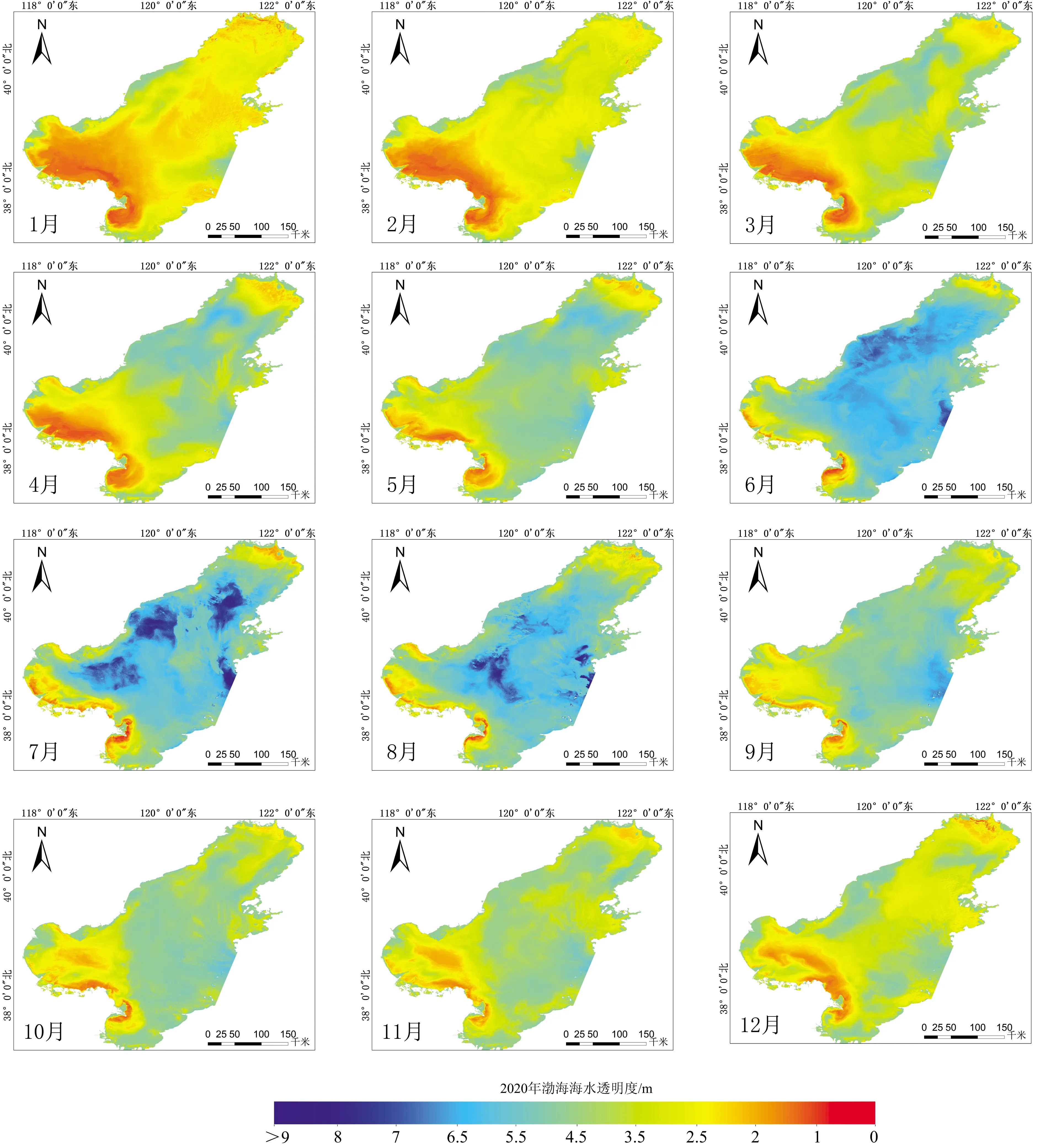
图5 2020年渤海水体月平均透明度空间分布图Fig.5 The spatial distribution of monthly average SDD of Bohai Sea in 2020
3 结 论
利用渤海实测光谱与透明度数据,结合Sentinel-3 OLCI传感器中心波段建立了适用于渤海的透明度反演模型,并将模型结合Sentinel-3 OLCI同步影像数据进行了透明度反演精度验证,其中以B6、B7为敏感因子建立混合波段模型反演效果最佳,其R2为0.68,MRE为15.93%,RMSE为0.48 m。 将该模型应用于渤海透明度反演,得到2020年月均渤海透明度时空分布产品,发现渤海透明度具有明显的季节性与区域性特征。 地域上,透明度呈现近岸海域低、离岸海域高的分布特点,三湾内透明度常年较低,渤海中央海盆与渤海海峡透明度相对较高;时间上,夏季7、8月份透明度全年最高,冬季1、2月份透明度处于低值期,考虑到冬季部分海域会有海冰的影响,该反演结果在局部产生一定的误差,但对渤海整体的变化趋势影响不大。 本研究结果为渤海透明度遥感监测提供良好的理论基础,同时由于构建模型的数据主要以渤海近岸为主,渤海海盆采样数据较少,使得渤海海盆的透明度反演结果存在一定的不确定性,有待于补充大量现场实测数据,对模型进行进一步的改进。

图6 2020年渤海透明度月度变化趋势图Fig.6 The monthly change trend of Bohai Sea SDD in 2020