雷达通信一体化系统的信号处理与识别技术研究
2022-04-04姜涛
姜涛
(海军工程大学 湖北武汉 430033)
由于受到电磁信号的干扰,加上传感器设备自身因素的影响,导致侦察探测信息网络中每个传感器接收的信息必然不同。在雷达通信一体化目标识别中,多传感器系统由于其独特性能够提供不同维度的各种数据特征,有利于提高目标识别的准确性。因此,目前大多数侦察探测设备均采用了多传感器系统,降低了电磁环境对目标识别信号的干扰,达到探测数据互补、融合、冗余的目的。相互独立的侦察探测系统通过增加空间的覆盖率再进行融合,能够获得更为精准、更为可信的数据融合结果[1]。
1 系统结构设计
由于多传感器系统自身独有的融合性,本文提出了雷达通信一体化目标识别系统结构设计方案,如图1所示。该目标识别系统采用的是多传感器系统,结构属于融合技术中决策级融合,主要是通过对不同的侦察探测传感器数据信息进行获取,经过处理,得到决策结构,再利用融合技术实现数据融合处理。这种方法能够充分发挥传感器自身的特征优势,有效降低数据计算量,为在电磁环境中目标识别的有效性和准确性提供了有力保障。
图1 中,目标识别系统基于数字信号处理技术基础,通过对多传感器系统获取的识别目标进行处理,得到同一目标不同类型的数据特征,再将这些数据进行特征融合,实现对融合数据的高效利用,将融合数据通过算法模型计算,提高侦察探测的准确度。对于目标识别系统第一次未能成功获取的目标信息,经过一次又一次地更新识别创建目标知识库,最终得到目标识别结果[2]。
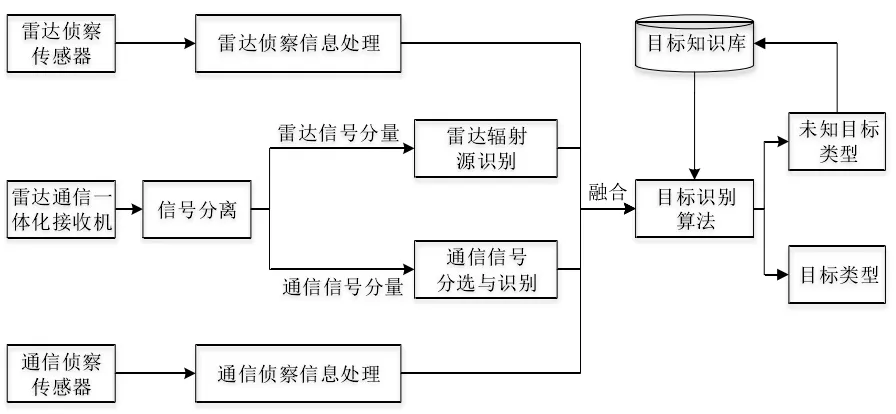
图1 系统结构示意图
由于雷达侦察探测数据和通信数据均属于一类数据,需要经过雷达通信一体化接收机的处理,因此要采用数据融合技术进行处理。为了更加完整地体现目标的各种信息,可以采取不同维度侦察探测信息的方式实现。因此,数据融合技术对目标识别有着不可替代的作用[3]。
2 雷达通信信息处理
2.1 雷达侦察信息处理
雷达侦察传感器主要包含以下几个部分:雷达侧向接收机、雷达测频接收机和信息处理机等。雷达侧向接收机主要负责输出范围内的到达角数据,实现侦察获得信息的全部到达角数据。雷达测频接收机可以输出侦察到各个脉冲的数值,且需要通过雷达信息系统处理较多数据。同时,雷达信息处理系统还需要输入并存储如侦察周期、侦察半径和俯仰角等接收机的参数[4]。
雷达信息系统需要对接收到的数据进行时域、频域和空间域分析,再分类存储,将存在交叉重叠的脉冲信号分离出来,相同雷达发射出来的脉冲信号归类到同一空间中,再与特征库中的数据进行比较,通过分离结果提取到信号特征,将特征输入到算法中进行类型识别,获得侦察信息的实际目标状态和威胁情况等。
2.2 通信侦察信息处理
通信侦察传感器能够截获目标信息,获得目标信息电台的实际功率和中心频率等,通过雷达通信电台的信息处理和识别方法,对目标信息电台进行识别。一般比较常用的雷达通信电台识别算法包括基于D-S证据理论的算法、KNN 算法等[5]。在非常复杂的电磁环境中,通信侦察信息包括几个特征:一是不确定性,对于某个频段的侦察通信来说,会有多个不同兵种同时使用,因此,难以通过个别通信电台对目标进行识别;二是具有多边形,在实际战争环境中,敌方的通信方式经常会进行改变;三是不完整性,由于天气、噪声的干扰,导致获取的侦察信息不完整[6]。
通信侦察传感器得到侦察的信息后,将其存储于共享数据库中,再对这些数据信息进行分类简化,获得预备数据库,通过识别算法对预备数据进行计算,最终获得平台属性信息。
3 基于D-S证据理论的目标识别算法
本文提出的雷达通信一体化目标识别系统结构模型,其每个传感器获取到的数据信息均属于不完整信息,因此,必须对这些“不完整”的数据信息在数据融合处理中进行决策级融合处理,以提高侦察探测目标识别的精准度。
在雷达通信一体化目标识别领域中,没有统一确定的目标识别算法。经过国内外专家的深入研究,根据采用的技术和算法不同,提出了多种基于多传感器的目标识别方法,主要总结归纳为4类:一是认识模型算法;二是参数分类算法;三是物理模型算法;四是多类算法综合识别法。本文提出的雷达通信一体化目标识别系统结构模型,通过对“不完整”的数据信息的处理,对D-S 证据理论识别算法进行了深入研究和分析统计,结合系统建模,获得更优的结果[7]。
基于D-S证据理论的目标识别算法属于概率论理论知识,目前广泛应用于专家系统、目标识别、数据融合等技术中。
基于D-S 证据理论的目标识别算法的原理是:假设U属于一个完备集合的假设空间,是变量x的可能取值的穷举集合,U作为识别框架,其幂集是2v,其包含的元素互不相容,在雷达通信一体化目标识别中,将其作为一个命题,无论是不确定的目标或者空集,都看待为目标。基于D-S证据理论算法步骤如表1所示。
输入:ε1是传感器对目标识别的决策信息,ε2是判断阈值。
输出:Ot是系统识别目标。
步骤1:确定识别框架U={O1,O2,…,Om};目标数目设定为m,mj(Oi)是基本计算概率;1 ≤i≤m,1 ≤j≤n,n是传感器数目。
步骤2:对各路传感器数据进行计算,得到其对U的基本概率赋值。
步骤3:计算各路传感器对目标进行信息融合后的概率赋值m(Oi),1 ≤i≤m。
步骤4:遍历i=1,2,…,m,获得最大时m(Oi)对应的i,记作t;第二大时m(Oi)对应的i,记作t2。
步骤5:根据阈值ε1、ε2,判断m(Oi)是否满足条件。如果满足条件,则输出识别目标Oi;不满足条件,则判断为不确定目标。
4 仿真实验及结果分析
采用基于D-S 证据理论算法,通过本文提出的雷达通信一体化目标识别系统结构模型对目标进行侦察探测。假设各路传感器已经成功连接,敌方目标已经被本系统侦察探测到,雷达通信一体化目标识别系统侦察探测到1 类雷达信号、1 类通信信号,雷达侦察探测传感器侦察探测到2 类雷达信号,通信侦察探测传感器侦察探测到2 类通信信号。Mradar1、Mradar2是经过雷达侦察探测传感器数据处理后对需要识别目标的基本概率赋值,MInter-radar是经过雷达一体化系统数据处理后雷达信号对识别目标的基本赋值,MInter-com是经过雷达一体化系统数据处理后通信信号对识别目标的基本赋值,Mcom1、Mcom2是经过通信侦察探测传感器的数据处理后对识别目标的基本赋值。可能的识别目标包括强击机O1、歼击机O2、轰炸机O3、预警机O4、加油机O5、侦察机O6、截击机O7、歼击轰炸机O8、直升机O9,U代表目标不确定。基本概率赋值如表1所示。

表1 对基本概率赋值
对Mradar1、Mradar2进行数据融合处理,得到雷达侦察探测传感器的基本概率赋值,记作Mradar;对MInter-radar、MInter-com进行数据融合处理,得到雷达一体化系统的基本概率赋值,记作MInter;对Mcom1、Mcom2进行数据融合处理,得到图像侦察探测传感器的基本概率赋值,记作Mcom;对Mradar、Mcom进行数据融合处理,得到基本概率赋值,记作Mradar-com;继续对MInter和Mradar-com进行融合得到最终的数据融合结果,记作M。具体融合结果如表2所示。

表2 数据融合结果
由表2可见,随着数据融合的各路传感器的增加,导致不确定目标的基本概率赋值逐渐下降,当完成全部的数据融合处理后,不确定目标的基本概率赋值降为0。但是,识别目标O6的基本概率赋值却不断上升,通过判决可知,将其阈值设定为ε1= 0.2,ε2=0.01,得到最终识别结果为侦察机O6,与数据融合各路传感器的目标识别、雷达通信一体化系统的目标识别结果进行对比,侦察机O6的结果提高到了0.8914,雷达通信一体化系统的融合结果判决失败,证明了该模型的有效性。
5 结语
综上所述,本文主要提出了一种雷达通信一体化系统结构设计方案,重点研究了目标识别问题,分析了多传感器系统和数据融合技术,构建了基于D-S 证据理论的目标识别系统模型,最后针对该模型进行了算法仿真实验。实验结果表明,多传感器系统及数据融合能够有效降低雷达通信一体化系统应用的不确定性,该算法模型真实有效。
