基于胶囊网络的产品形态设计决策模型
2022-04-04裴卉宁黄雪芹李海涛白仲航
裴卉宁,黄雪芹,李海涛,白仲航,3+
(1.河北工业大学 建筑与艺术设计学院,天津 300401;2.青岛科技大学 数理学院,山东 青岛 266042;3.河北工业大学 国家技术创新方法与实施工具工程技术研究中心,天津 300401)
0 引言
产品造型设计是设计艺术、艺术与工程技术融合完成方案的过程,融合了形态、色彩、材料和质感等造型元素,以塑造差异化的产品造型。其中,形态作为产品的物质载体,是设计者与用户交流的重要媒介[1]。在个体设计师根据自身设计创意与经验,运用形态设计资源完成目标方案设计后,准确合理的设计决策对产品研发过程尤为重要[2]。但产品形态设计方案决策受需求多样性、信息模糊性、决策主观性等多种因素影响,具有多目标、多层次与不确定的复杂特性,难以形成一套理性有效的设计决策方法[3]。
目前,深度学习、区块链、人工智能与云计算等新技术逐渐与设计领域相融合,人工智能相关理论和方法在解决图像识别和设计决策等方面表现出了较好的优越性,为提高产品形态设计决策的准确度与效率提供了方法参考。国外学者主要对产品决策流程的基本特性[4],决策方法的优化问题[5]进行研讨;国内学者则从决策偏好[6]、设计理性[7]或多目标群体[8]等角度入手,将数据挖掘[9]、机器学习[10-11]等先进技术运用到智能决策系统中。上述研究在设计决策方面取得了一定的成果,部分学者基于实例样本的数据库对设计决策模型进行了构建和研究,但是较高的数据库样本量要求,对特殊研究对象的小样本数据集问题提出了挑战。
近年来,深度学习利用多层神经网络分析图像逐渐抽象的层次化特征,从而建立视觉图像到语义类别的映射[12],在语音识别、计算机视觉、医学药物检索等领域取得了突破性成果。工业制造领域,深度学习网络结构中的卷积神经网络(Convolutional Neural Networks, CNN)[13]、循环神经网络(Recurrent Neural Networks, RNN)[14]、深度残差学习网络(Residual Neural Network, ResNet)[15]等已被用于解决产品设计流程和设计决策等问题,但亦需大量训练数据样本作为支撑,而多数产品自身具有较大的差异性与独特性,完整且基数大的设计案例收集相对困难,并不能保证运用深度学习支撑智能决策模型系统的合理性。
综上所述,针对以上发现的传统深度学习模型在小样本数据集表现不佳的问题,本文提出了基于胶囊网络形态设计决策模型,利用胶囊网络对样本量要求不高的优点,运用深度学习方法进行产品设计方案智能决策,以克服小样本数据集情况下传统卷积神经网络用于设计决策的弊端。
1 胶囊网络与图像识别
1.1 胶囊网络
胶囊网络是由Geoffrey Hinton提出的新型神经网络结构,目的是规避传统CNN的固有缺陷[16]。现有的研究已将胶囊网络应用于多个研究领域,并取得了较好的成果。例如,冯伟业等[17]运用胶囊网络提出了合成孔径雷达图像分类方法,解决CNN池化操作中主动丢弃大量细节信息,进而产生无法避免的过拟合问题;李鹏等[18]通过胶囊网络精确地传递大量姿态信息,提出了一种基于胶囊网络模型的深度学习方法,该算法在降低计算复杂性的同时精准识别了来自不同3D视图的行人;陈立潮等[19]采用超深度卷积神经网络改进特征提取部分,验证了胶囊网络相较于传统卷积网络能通过较少的数据集完成智能交通标志的识别。
传统卷积网络采用最大池化方法实现神经元的活动中的视角不变性的同时,会出现丢失有价值信息、忽视编码特征之间的空间层次关系等问题,从而导致特征提取不完全、图像的空间分辨率降低等现象,不利于对物体空间辨识度高的图像的识别。
胶囊网络则采用向量神经元规避传统卷积网络由于最大池化导致的特征提取不完全的问题,即所有胶囊检测的特征及其状态的相关信息,均以向量的形式(神经元则以标量输出)封装于胶囊[20],胶囊对特征的检测概率进行编码作为输出向量的长度,其特征状态则作为该向量的方向;若图像中被检测出的特征发生变化(如向量在空间中移动或旋转等),向量的长度不变而方向改变,胶囊仍然检测出特征。换言之,神经活动会随着实体在图像中的“外观流形上的移动”而变化,且检测概率仍维持不变[21]。正是由于胶囊网络检测特征的位置关系的特点,使其能在多数小型数据集中取得比卷积神经网络更好的结果。
1.2 产品形态图像
一个成熟的产品设计方案的诞生是一个复杂、反复迭代的过程,设计者常采用方案图像进行多轮次的产品设计方案展示,往往导致决策效率低且不准确度较高。对于形态较复杂的产品,从整体意义以及设计师设计习惯上产生的三视图是决定产品意象的主要因素。三视图图像既是传递设计思想和产品语义的载体,也能更显性而有效地反映该产品在3个投影方向上的形态特征与尺寸比例,如图1所示。
同时,面向设计领域的图像识别与处理任务,往往选取单一视角的方案图像作为输入,很难保证对象形态特征语义标注的准确性。若采用多视角图像即可弥补该缺陷,但传统的深度学习模型对于三视图图像的识别精度过低,不能准确地识别在不同视角下的同一对象。而且增加检测对象视角后会出现泛化能力普遍变差的现象,将导致训练难度急剧加大等问题,因此三视图图像在人工智能设计决策中应用性不高。然而,由于胶囊网络具有“视点不变性”的附加优点,可以检测图像中特定对象的空间层次关系,更适用于同一三维实体的不同视角图像的识别分类。
随着深度学习、人工智能等新兴技术与设计服务产业相融合。基于人工智能对大量设计方案图像及其感性语义进行快速准确的标注,也成为设计决策研究领域中的热点[22]。作为典型的计算机视觉识别任务,图像语义分割过程既是将数字图像划分为若干特定区域的过程,同时也是将所属同一区域的像素赋予相同编号的标记过程,进而实现图像特征提取和检测识别。
2 基于胶囊网络的产品形态设计决策模型
胶囊可以被认为是一组神经元,其输出代表同一实体对象的不同属性。浅层胶囊层通过变换矩阵对深层胶囊层进行姿态预测,然后使用动态路由机制,通过迭代聚类的方法获得耦合系数,并将相关胶囊的信息传递给下一层。基于胶囊的计算结构与路由机制相结合,可以识别数据特征之间的部分—整体关系,大大增强模型的泛化能力。因此,基于胶囊网络的产品形态设计决策模型可以更好地识别出不同视角下的同一物体,进而三视图图像能够更好地应用在产品形态设计决策领域。
2.1 模型整体框架
基于第1.2节内容,三视图图像可以通过人工智能算法实现分类、理解和特征语义评价。将设计方案三视图作为图像输入,经过图像预处理后根据机器人结构特征对关键造型区域进行图像语义分割,并提取关键特征进行判断。根据算法推理和预评估设计方案的分数,实现机器人设计方案的智能决策。
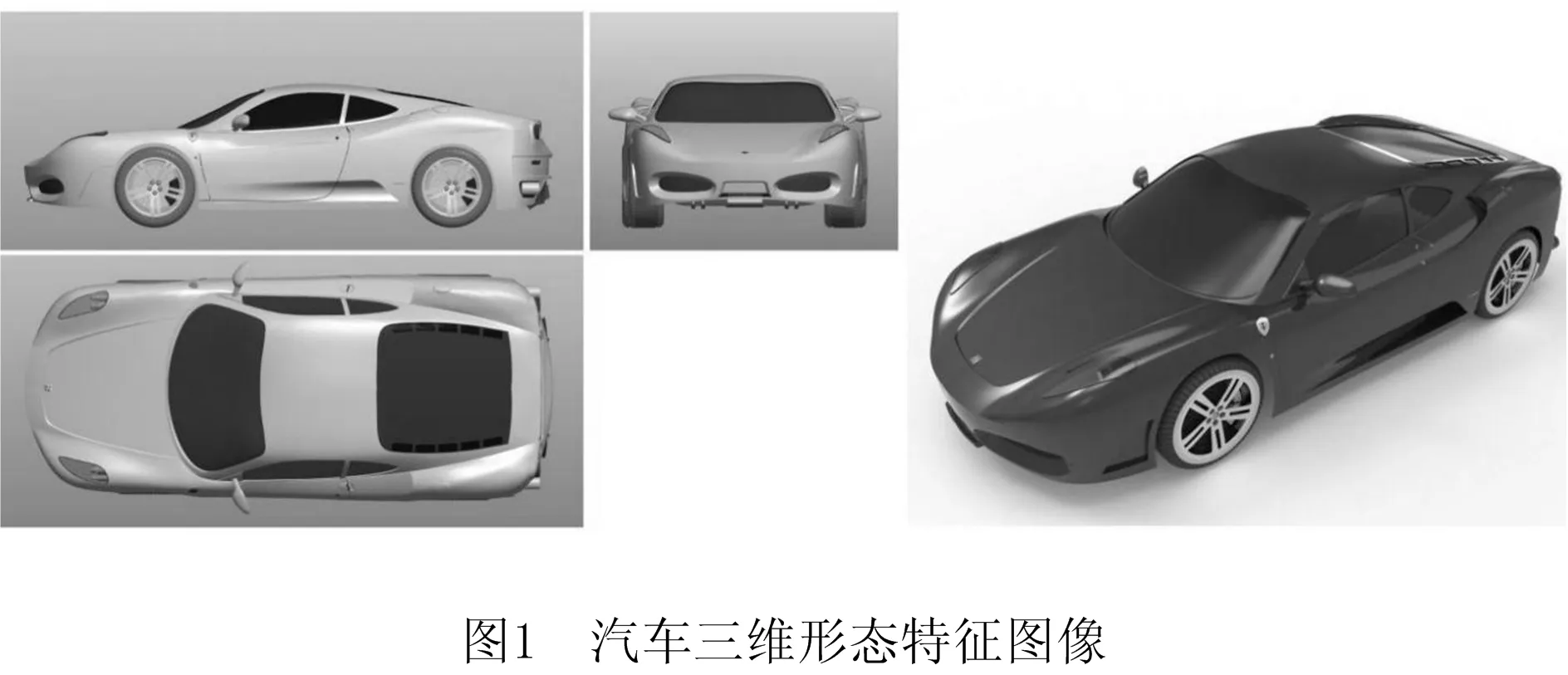
将既定的设计语义进行预处理后输入到模型中,对需要决策的方案设计图像进行学习训练,运用胶囊网络模型,得到基于深度学习系统的胶囊网络设计决策方法。如图2所示,该设计决策方法所涉及的整体框架包含历史数据集训练与测试设计数据决策两部分。
(1)历史数据集训练部分 首先,搭建基于产品形态语义的训练集数据搜集及其预处理。搜集特定产品图像建立胶囊网络设计决策模型的初步数据集;其次,运用图像分割和语义标注,搭建出胶囊网络决策模型所需的方案图像数据集;最后,通过胶囊网络对方案图像进行卷积操作,并输入模型中。
在整个胶囊网络模型中,首先,由卷积层负责所输入图像中实体形态特征和语义标注特征的提取;其次,将这些特征作为输入发送到主胶囊层。在主胶囊层中,每个主胶囊为一个神经元组,浅层胶囊层将卷积层提取的特征图转化为向量胶囊;再次,通过动态路由算法对连接主胶囊和数字胶囊之间的网络参数进行训练,从而得到数字胶囊。动态路由算法实现了深浅两层隐藏层之间关系的动态连接,使得胶囊之间可以更准确有效地传递信息;最终,运用动态路由规则将主胶囊层与数字胶囊层连接,输出最终的结果。
(2)测试设计数据决策部分 经过训练,模型将隐式地学习语义和图像特征之间的关系,动态地调节各层之间的权重。模型训练完成后,将网络参数进行保存用于设计决策部分。输入既定设计语义目标到决策模型,再将设计过程所得的设计方案图像输入到已训练的设计决策胶囊网络中。通过人工智能对设计图像进行语义解码,所输入的设计方案由胶囊网络模型识别处理得到1~10分的评价结果。
2.2 构建设计方案图像数据集
对于图像中的实体检测和特征状态识别,胶囊网络设计决策需要对产品形态结构区域进行语义分割,产品方案形态需提供关键标注区域的轮廓边缘线[23]。本文模型数据集的构建需要对数据集样本进行预处理与特征提取,具体步骤如下:
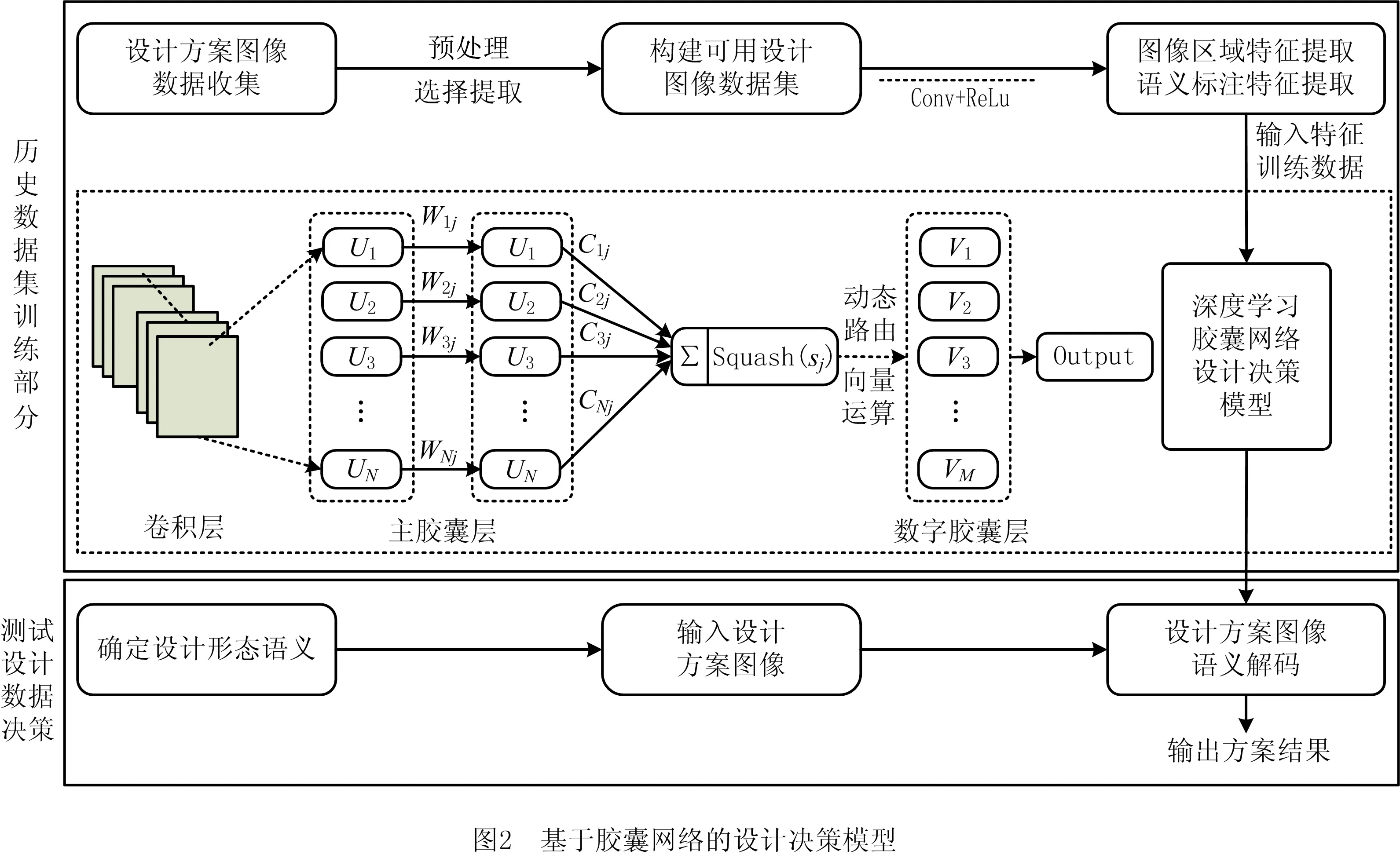
(1)如图3所示,本文以智能陪护机器人形态图作为基础数据集。数据集包含从3个角度捕捉的对象图像,通过对不同视图的机器人形态特征进行训练,得到训练模型,用于机器人形态识别。初步收集了销售市场现存的机器人形态及设计方案的三视图或近似三视图作为图像数据。
但数据集仍远不够数量基数,本文通过网络爬虫爬取的图像对智能陪护机器人进行数据集扩充。扩充后的三个视图方向上训练数据集分别对应的样本图像个数以及图像内目标个数如表1所示,其中部分单张图像包括多个以及多种样本目标。
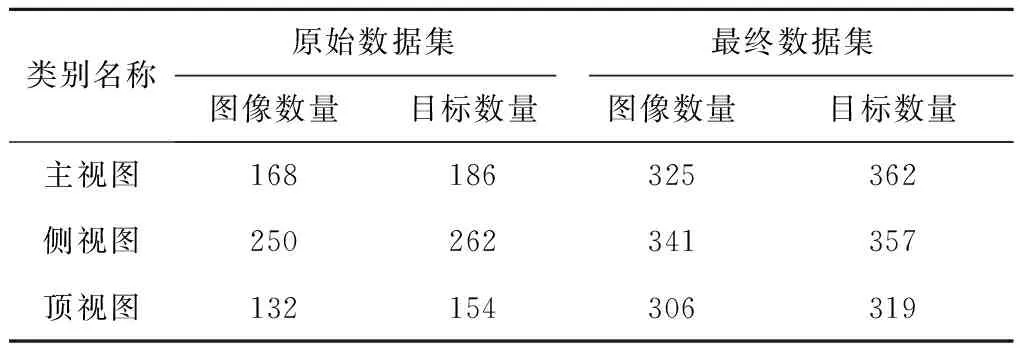
表1 数据集类别统计
(2)数据集扩充后,筛选出符合数据图像要求的设计方案历史数据集样本,剔除无效样本。通过初步筛选得到的数据集共300例设计案例样本图像,其中每例机器人设计案例图分为正视、侧视和顶视3个视角类型。将数据集随机划分为训练集(250个案例样本,250×3张图像)和测试集(50个案例样本,50×3张图像)两个部分。部分智能陪护机器人数据集如表2所示。
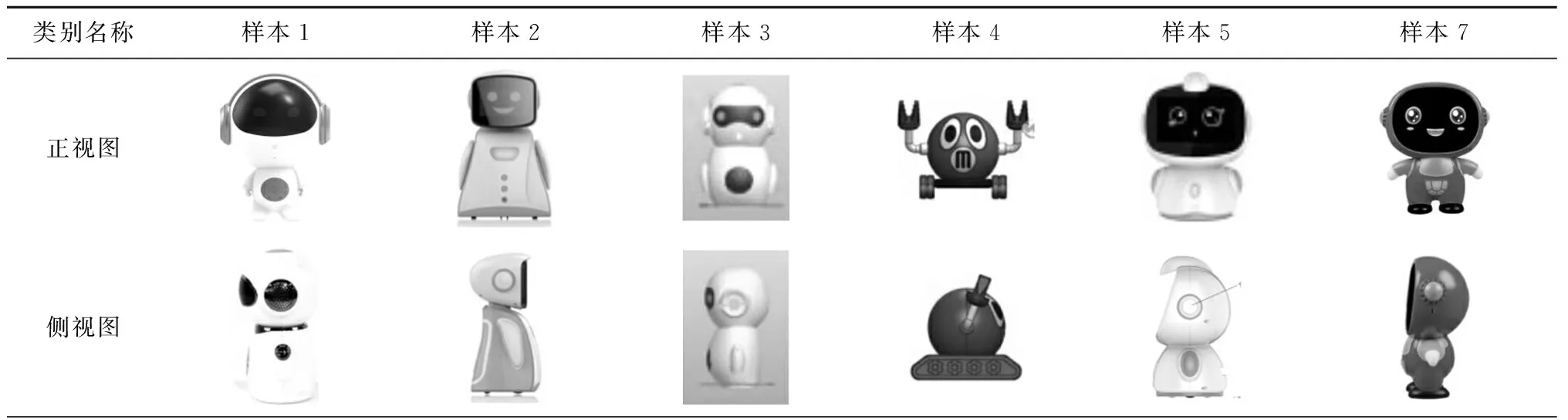
表2 部分数据集构建

续表2
(3)完成基础图像数据后,从产品外轮廓信息中提取出形态边缘线,依据不同结构区域的边缘线进行图像区域分割。在智能陪护机器人的形态设计中,方案三视图或实物照片一般较为清晰、鲜少遮挡。为了更好地实现机器人图像分割和轮廓提取过程,本次实验采用FCN(fully convolutional networks)开源代码进行形态区域分割及边缘线绘制,从而完成图像数据集的初步预处理。
(4)根据对现有智能机器人案例样本形态的综合分析,得到影响现存智能陪护机器人造型的5个主要部位:底座、躯干、交互操作区、上肢臂、脑感知区[24]。在本文中按照基本结构部位分为头部、躯干、上肢和底座4部分,这4个主要部分互相影响且综合作用于智能陪护机器人整体形态感知。以机器人的结构划分后的关键标注区域如图4所示。

(5)为增强胶囊网络模型标注的权威性,根据王年文[24]对智能服务机器人的造型意象研究成果,通过定性数据分析和感性工学方法将其造型设计意象语义词汇概括为简约—复杂、易用—难用、优雅—粗俗、时尚—保守、沉稳—稚拙、安全—危险、修长—短小、流畅—晦涩、温暖—冰冷9对词汇。为了排除色彩等影响因素,使语义标注更加准确严谨,将与形态相关性较弱的词汇进行精简,并添加了动感—稳健、科技—守旧作为语义词汇,总共形成9对语义词汇标注数据。已有研究提出产品感性意象与设计要素间映射关系模型,明确产品感性意象创新设计参考依据[25]。故以分析所得的机器整体形态与关键形态结构为基础,讨论意象语义与形态结构之间的关联性,对数据集的关键标注区域进行语义标注。
产品形态方案数据集的语义标签采用麻省理工学院计算机科学和人工智能实验室(Computer Science and Artificial Intelligence Laboratory, CSAIL)研发的开源图像标注工具Labelme进行数据集标注。在对机器人形态整体及各模块进行语义描述的基础上,由具有6年以上产品设计经验的设计者对产品可实现性与设计方案总体评价分10级(1~10)进行标注。产品可实现性主要考察方案落实工业化生产的可能性。依据对设计方案图像形态的综合性评价进行设计方案总体打分。首先,对使用者、设计专家等人群进行调研或实验;然后,采用SPSS 22统计分析软件对不同参与者的评价或标注结果进行数据分析;最后,对其置信度统计用以提升数据集的可信度。数据集形态语义标注如表3所示。
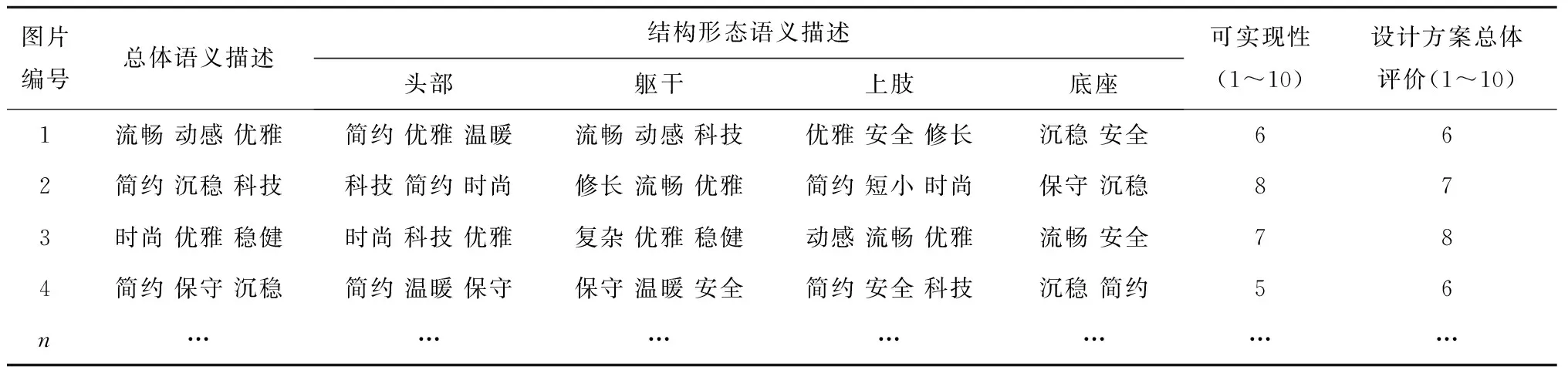
表3 设计历史数据集形态语义标注
如果面临数据量较大,且需不断对数据进行训练的情况,胶囊网络的算法需要人为介入数据集识别和图像数据中的实体标注,通过人工智能算法得到图像中某一实体的分割区域初步定位。而且,基于胶囊网络数据集相对其他深度学习网络小的优势,还可使用人工校正数据信息。
2.3 基于胶囊网络的深度学习模型
胶囊网络基本的结构为输入层、卷积层、主胶囊层和数字胶囊层。如图5所示,卷积层采用9×9且步长为1的卷积核进行特征提取,获得20×20×256的张量,即通过ReLU激活,输出256通道20×20的特征图。再将特征图输入主胶囊层(primary capsules)中,该层包含32个主胶囊,负责获取卷积层检测到的基本特征并生成特征的组合。每个胶囊将8个9×9×256卷积核运用于20×20×256输入张量,从而生成6×6×8输出张量。数字胶囊层包含10个数字胶囊,其中每个胶囊对应一个类别。根据胶囊的内部工作原理,每个胶囊输入一个6×6×8×32张量,即6×6×32的8维向量,相当于1 152维输入向量。
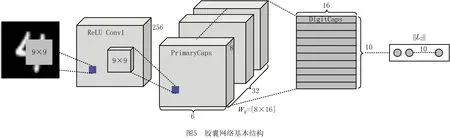
将1 152个8维的胶囊输入到Squash激活函数中,并输入到数字胶囊层。在胶囊内部,输入向量中的每一个都获得其自身的8×16权重矩阵,通过动态路由将输入向量由8维空间映射到16维空间,最终输出为10个16维向量。再对10个16维的向量分别计算其长度,得到10维的输出,最后和标签值计算损失。
数据集涉及到3个角度捕捉的对象图像,与传统的CNN模型相比,受过训练的胶囊网络检测该数据集中对象的准确性更高。数据集中包含不同视角的同一对象的图像数据及其语义标签与打分的数据。运用胶囊网络“视点不变性”特点,即使输入图像的位置、状态等发生变化,胶囊网络仍能判断输入特征的存在性;同时能够建模特征的空间层次信息。
首先,对设计方案图像做归一化处理。将设计方案图像按照其短边进行等比缩放后,对图像内实体(机器人)随机采样得到剪裁图像。第一层是卷积层,负责对输入图像作常规的卷积操作,获取图像特征,所提取的图像特征包含机器人整体形态及其4个关键标注区域的形态特征。其次,在主胶囊层中再作卷积操作,使所得特征图像均转换为一维,并将若干个特征组合到一起,这样就将其调整成适用于胶囊网络的一组向量神经元,即胶囊。主胶囊层由多个向量组成,这些向量分别代表来自3个视角机器人图像的头部、躯干等结构特征。输入一张机器人图像时,主胶囊层将检测学习到的特征(头部、躯干等结构特征)。胶囊将特征检测的概率作为其输出向量的长度进行编码,检测出的特征状态被编码为该向量指向的方向(“实例参数”)。因此,检测出的特征在图像中移动或其状态发生变化(对象即为视角改变)时,概率仍然保持不变(向量长度未改变),网络预测的结果中的位置和状态信息也随之改变(向量的方向会相应地发生变化)。在此基础上,数据集图像特征通过向量的形式进行胶囊间的信息传递,再利用动态路由算法获得一组数字胶囊。最后,研究对象存在的概率依据向量模的大小进行判断,其存在概率随模值递增。
因此,将同一机器人不同视角的图像输入到胶囊网络中时,模型会对不同的特征进行空间层次上的建模,保留各个特征重要的空间信息,即使视角发生变化,模型也能够将不同视角下的同一目标划分为相同的类别。
考虑机器人图像识别任务,机器人图像经过处理后会得到多个胶囊。其中,低层胶囊(如头部,躯干,底座等)会将向量发送到高层胶囊(机器人整体形态),这个发送向量的过程包含两个步骤:
步骤1低层胶囊会为每个可能的高层胶囊找到一个预测向量。令ui表示低层胶囊(头部),则高层的预测向量可以通过式(1)得到:
uj|i=wij×ui。
(1)
式中:wij表示低层胶囊与高层胶囊之间的权重矩阵,该变换矩阵表示输入的对象结构特征(如机器人头部)和输出的(机器人整体形态)之间的空间关系;uj|i表示通过低层的第i个胶囊预测生成的较高层的第j个胶囊。
步骤2胶囊网络以矢量形式封装了有关特征状态的所有重要信息。低层胶囊i需要决定如何将其输出向量发送给高层胶囊j,该过程可概括为动态路由的主要思想。通过动态路由算法,权值将不断地更新迭代,直至低层胶囊i和高层胶囊j单元呈现最佳的匹配。这意味着低层胶囊i可以预测高层胶囊j的输出结果,只有在这些预测达成一致时,高层胶囊j才会被激活。动态路由和重建正则化使胶囊网络能够建模空间层次关系,即使面对训练集中不同视角下的同一对象预测时,胶囊网络依然具有良好的泛化能力。动态路由规则是胶囊网络取得更好的设计图像特征识别效果的主要原因,也是胶囊网络模型的重要思想。高层胶囊的计算如式(2)和式(3)所示:
(2)
(3)
其中:cij为低层次第i个胶囊与高层次第j个胶囊之间的耦合系数;sj为第j个胶囊的输入向量,运用非线性函数squash(.)获得Vj(高层胶囊的输出)。
以上参数的更新需要动态路由算法的动态迭代,通过调整耦合系数cij使低层胶囊将更准确的信息发送给相应的较高层胶囊。具体如下:
输入:max iterationsr, layerl, Prediction vectorsuj|i;
输出:Vj。
Initialization:bij=0
1: for r iterations do
4: Vj=squash(sj)
5: bij=bij+vj*uj|i
6: end for
整个网络其余的卷积参数和胶囊内的权重矩阵w都需要根据损失函数进行更新,损失函数如式(4)所示,
Lk=Tkmax(0,m+-‖vk‖)2+
λ(1-Tk)max(0,‖vk‖-m-)2。
(4)
式中:Tk表示k类是否存在,存在为1,不存在为0;λ表示降权参数;m+为上界,用于惩罚假阳性,即预测k类存在但实际不存在;m-为下界,用于惩罚假阴性,即预测k类不存在但实际却存在,产生损失函数较大的现象。本文设m+,m-和λ分别为0.9、0.1和0.5。
3 实验验证与分析
3.1 实验设置
在本次胶囊网络设计决策模型实验中,运用Python编程语言,以TensorFlow作为深度学习编程框架。模型选择张量流作为后台,并将相关程序部署在图形处理器(Graphic Processing Unit, GPU)集群上运行。首先以智能陪护机器人历史设计数据作为产品识别及标注的基础数据集,待模型训练完成后将其参数(权重和偏置)应用至胶囊网络设计决策模型决策过程,再输入既定语义标注得到人工智能模型决策识别结果。通过验证设计决策中胶囊网络模型的性能,证明了该网络模型能够完成给定的设计决策任务。
整个胶囊网络设计决策模型输入图片均调整为30×30的灰度图,将经过预处理的智能陪护机器人设计历史方案图像包括其形态语义及决策分数的数据作为输入,经过卷积层的卷积操作进行数据降维,得到14×14×256的图像特征。在胶囊网络中,通过动态路由算法对连接主胶囊和数字胶囊的权重进行训练,当较低层的胶囊与高层胶囊具有较高的相似度时,低层胶囊会决定将更多的权重赋给高层胶囊,则会向高层胶囊发送更多的信息。通过计算胶囊的模长,获得目标的类别概率,再通过标签与输出概率计算损失,回馈到网络中。最后,每个区域将被分配到多个语义标签。
由于图片数量较多,在训练过程中采用批归一化方法(Batch Normalization, BN),对输入层和中间层的数据分别进行归一化处理。使用BN后对于每个特征图像均仅有一对可学习参数:γ、β,即求取全部样本所对应的某特征的所有神经元的平均值和方差,再对该特征图神经元作归一化处理。卷积层包含激活函数ReLu,将批归一化放在ReLu之前,作为神经网络的一层,输出层则为softmax分类器获取识别结果。
3.2 实验数据集
由2.2节的数据可得原始智能陪护机器人设计方案三视图及近似三视图图像数据共972个,其中每个图像数据包含5个形态语义标注信息和2个评价分数数据信息。将数据集筛选后随机地划分为训练集和测试集2个部分,训练集包括750张图像目标样本,其余150张图像数据样本作为测试数据集。
胶囊网络训练测试的数据集均采用较高清晰度的灰度图,仅关注机器人形态数据信息,尽量排除图片质量、色彩等不利的影响因素。网络训练参数为:每批训练数据96张,路由更新为3次,迭代50次。
3.3 实验结果分析
3.3.1 验证识别效果
首先,对智能陪护机器人3个视角的图像识别精度进行分析,分别统计出3个类别正确分类与非正确分类数量,采用精确度、召回率和F1分数评价模型性能,实验结果如表4所示。
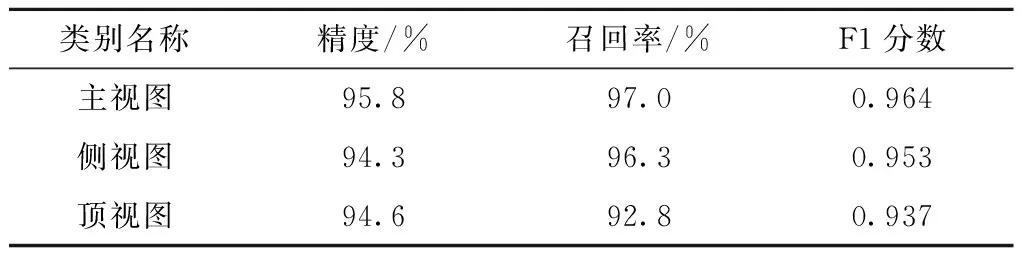
表4 识别性能评价统计
由表4可知,胶囊网络采用向量神经元,对整体同变性有较好的鲁棒性,能够较准确地识别不同视角的同一机器人的图像特征。其中,识别效果最优为主视图,顶视图的识别效果较差,这是由于机器人的主视图图像分割边界更清晰,机器人各部位形态特征展示区域较平均;并且设计师容易忽略产品的顶视图形态,导致出现类似的图案与形态结构线,相对于另两种视图的区分度较弱,从而导致在胶囊网络中识别效果较差。
3.3.2 模型性能评估
为了评估基于胶囊网络的形态设计决策模型性能以及决策满意度,决策部分由甲方将需要改型的智能陪护机器人两组形态语义词汇(分别是简约、稳健、流畅和科技、温暖、动感各3个)作为设计起点,要求每组语义词汇各出3套设计方案图。设计者通过明确的设计决策语义词汇约束分别进行设计,将机器人语义描述词汇通过个人设计想法描绘为设计方案,最终获得两组设计方案群Q(分别为:A1、A2、A3;B1、B2、B3),如图6所示。

设置甲方组、专家组(4位设计专家成员)共同参与3×2个设计方案的满意度评价,与胶囊网络设计决策模型中各迭代次数节点的设计方案评价作比较。将甲方组的评价结果换算后作为满分参照(100分制)。本次实验中,以设计决策准确率作为基准指标,用以推断胶囊网络形态设计决策模型的性能。设计决策准确率是一个拟合度指标,其综合反映了专家组与设计决策模型的方案图像决策得分与甲方参照组分数的拟合度,所测试模型的决策性能有效性与拟合度成正比。
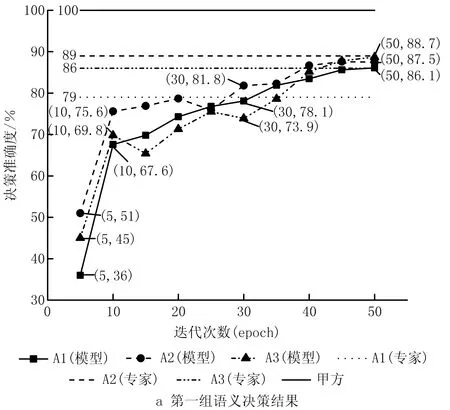
如图7所示,运用设计方案决策准确度曲线评价决策模型性能。以胶囊网络决策模型的迭代次数(epoch)为横坐标,绘制出设计决策准确率曲线。图中,模型的决策准确率随迭代次数不断增加而上升,且趋于稳定趋势。
第一组形态设计语义词汇标签为简约、稳健、流畅,将对应的A组设计方案三视图作为数据图像输入后,观察分析甲方组、设计专家组和胶囊网络决策模型对A1、A2、A3设计方案的决策准确率变化曲线。专家组对于3个设计方案的设计决策准确率分别为79%、89%、86%。当胶囊网络设计决策模型的迭代次数在50次时,对于3个方案的设计决策准确率分别为86.1%、87.5%、88.7%,其决策模型在A1和A3方案的决策满意度均高于专家组的平均决策满意度。
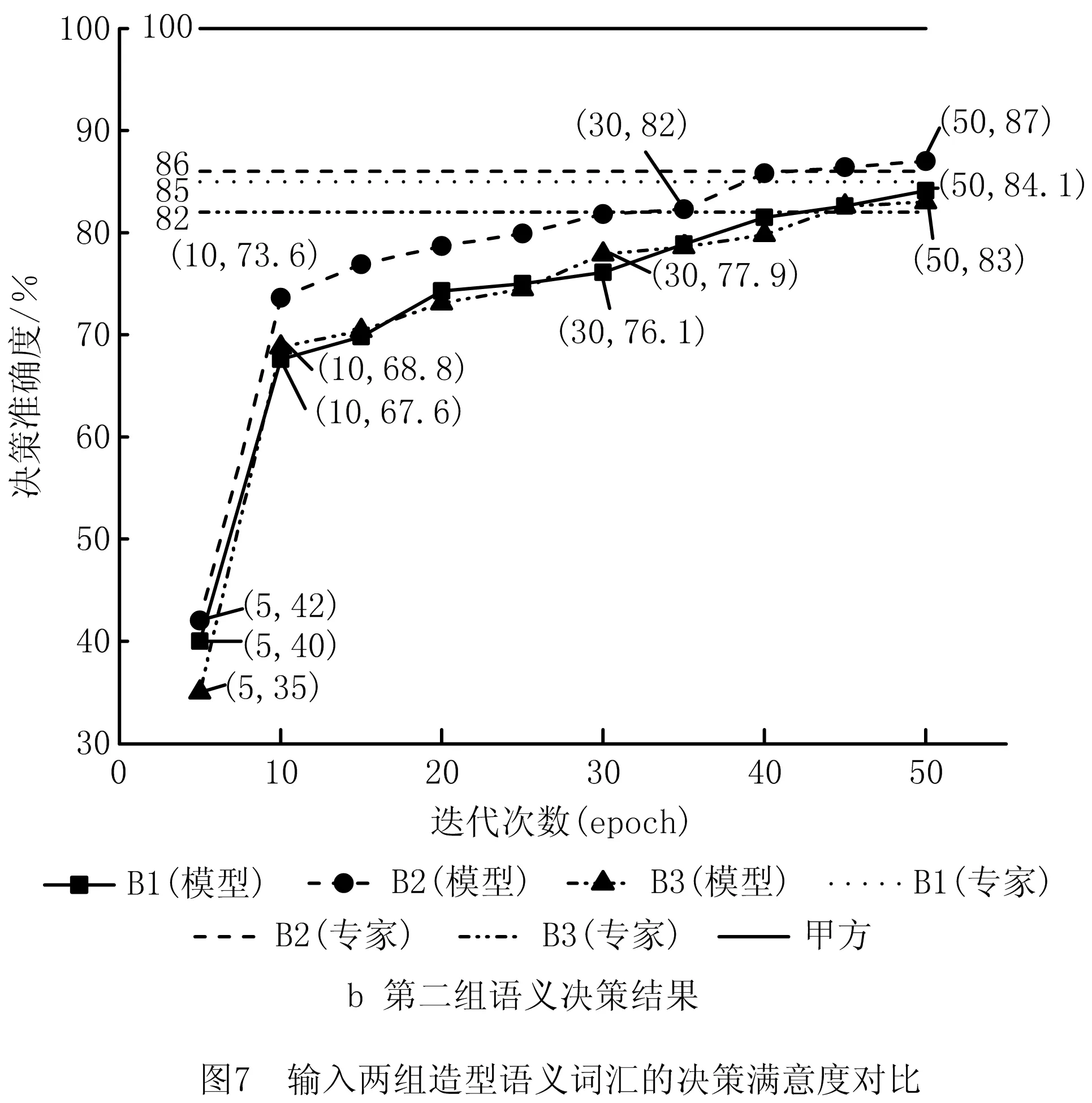
第二组产品设计语义词汇标签为科技、温暖、动感,专家组对于B1、B2、B3设计方案的设计决策准确率分别为85%、86%、82%。迭代次数为50次时,胶囊网络设计决策模型对于3个方案的设计决策准确率分别为84.1%、87%、83%,其决策模型在B2和B3方案的决策满意度均高于专家组的平均决策满意度。在经过第一组数据训练后再次训练第二组,其模型设计决策准确率相较于第一组更快速增加且增长趋势较为稳定,模型性能随训练次数的增加而提升。
3.3.3 算法性能对比
此外,依次使用CapsNet、CNN与DNN进行实验数据集的学习,进一步验证本文模型的有效性。如表5所示,以识别图像特征的实验精度和识别耗时、决策的平均决策满意度和平均召回率的数据记录为参照数据进行对比。
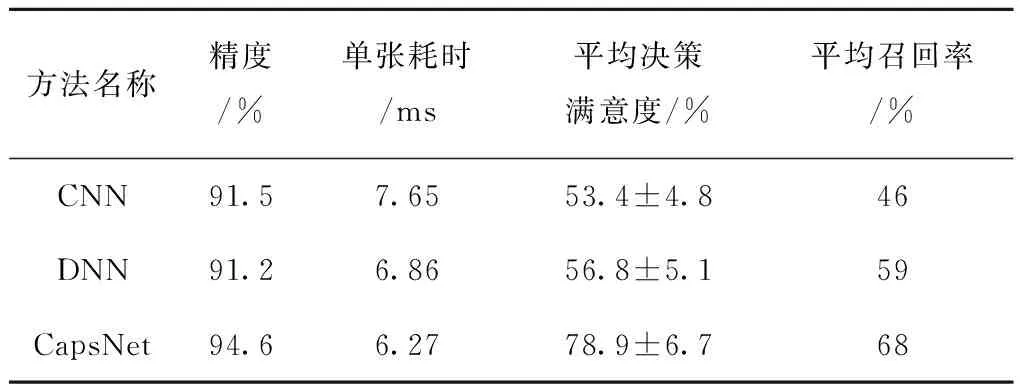
表5 不同算法性能与决策满意度对比统计
由表5可知,相同数据情况下,胶囊网络能以较高精度识别不同视角下的机器人图像,从而证明了该模型在机器人设计方案决策任务上的可行性。采用CapsNet网络结构可免于传统卷积池化操作所引发的信息损失,保证数据的等变性,能保留对象各部分编码特征之间的空间层次关系,在小样本数据集情况下得到更高的识别率。而传统神经网络的经典图像识别算法使用标量神经元,未保留特征的位置信息,对于图像变化的鲁棒性较差,不能很好地解决多视角图像问题,因此经典的CNN与DNN算法相对本文算法精度较低。在识别效率上,本文算法相对另两种算法未达到预期提升效果,原因在于动态路由算法较复杂的运行过程占据80%的总识别时间,因此动态路由算法是限制胶囊网络识别效率的主要原因。平均决策满意度和平均召回率方面的统计数据,则体现了基于胶囊网络的决策模型优于其他两种算法。
4 结束语
本文着力于研究新设计决策模式,提出了基于胶囊网络的产品形态设计决策模型,通过人工智能决策方法实现对小样本数据集的产品设计决策。搜集智能陪护机器人多视角图像建立设计方案数据集,并采用Labelme等工具对该数据集进行区域分割与语义标注;利用胶囊网络模型持续训练数据集以提高后期对于设计方案的决策准确度。运用深度学习的决策模型实现了机器人形态设计方案的评价与决策,且验证了模型的性能与准确度。通过与CNN及DNN较传统算法相比较,该模型取得了较高的决策满意度。由于本文对于感性意象词汇提取仅考虑了词性及词语间关系,尚未考虑单个词汇与具体形态特征区域之间的关系,图像关键特征区域的语义描述难免存在不够精确的情况,对映射关系的拟合产生了一定干扰.这些问题均有待思考与解决,是后续优化研究的重点。此外,还将尝试结合生成对抗网络(Generative Adversarial Network,GAN)展开智能设计决策研究。