基于数字孪生的车间三维可视化监控系统
2022-04-04孙恺庭于存贵居里锴
周 成,孙恺庭,李 江,于存贵,居里锴
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.南京理工大学 工程训练中心,江苏 南京 210094)
0 引言
随着信息技术的发展和工业化进程的持续推进,制造业自动化、信息化水平不断提高,越来越多的制造企业采用自动化生产线的方式从事生产制造活动。自动化生产线大量的投入使用能够满足大批量产品的生产,显著提高了企业的经济效益;但是,一方面由于信息化管理水平不高,企业缺乏快速有效的手段管理、监控车间的运行状态,另一方面由于目前市面上的管理系统种类多,管理系统之间、管理系统与控制系统之间缺乏有效的信息交互手段,生产过程的透明化很难实现。传统的车间监控方式以人工记录、二维报表、组态监控等方式为主,实时性和可视化效果较差。
近年来,基于实时数据驱动的车间三维虚拟监控系统备受关注,国内外许多学者也对此进行了研究和实践,取得了一定成果,但是普遍存在系统开发门槛高、开发效率低、系统可移植性差、监控方式单一等问题,不能很好地反映车间制造状态。如KIMURA等[1]面向中小企业开发了可用于夜间值守的远程监控系统,系统使用3D分层信息可视化环境作为监控系统交互界面。NG等[2]开发了压力机生产线监控与诊断系统,该系统具有远程在线监测和诊断功能以及媒体播放的功能。周光源等[3]针对制造业生产车间管理落后、信息滞后、可视性低等问题,分析了生产车间可视化监控面临的问题,研究了生产车间可视化监控的关键技术,定义了可视化对象模型技术的对象数据模型、可视化表征模型和用户交互模型。尹超等[4]研究了基于Flexsim的车间生产执行情况可视化动态监控实现技术。李智等[5]在分析目前车间监控现状及离散企业车间数据类型的基础上,设计了制造车间实时监控系统。曹伟等[6]提出一种基于无线射频识别技术的离散制造车间实时数据采集和可视化监控方法。张涛等[7]研究了面向数字化车间的介入式3D实时监控系统,并建立了该监控系统的需求框架、体系结构和运行模式。姜康等[8]基于虚拟现实技术与信息集成技术,建立车间状态监控系统,实现了对整个车间内人员、物料、设备等位置及状况的实时监控。孙志楠等[9]针对汽车装配线,系统结构多层次、设备种类多样化、工况环境复杂多变、大量多源异构信息并存的特点,通过物联网技术与计算机图形技术相结合,以友好的3D人机交互方式实现汽车装配生产的可视化管理。梁兴明等[10]基于Unity3D技术实现了车间生产过程的三维可视化,并完成了基于虚实融合的车间实时监控系统设计。赵浩然等[11]分析了数字孪生车间与三维可视化实时监控之间的关系,提出一种多层次的三维可视化监控模式和实时数据驱动的虚拟车间运行模式。
综上所述,目前围绕车间三维可视化监控难题,已取得一定研究成果,如已实现车间数据采集及车间事件建模;车间可视化监控由二维向三维转变,能够提供更多的车间信息,提高监控透明度等。但是同样存在一些问题,如可视化监控系统开发门槛高、开发效率低、系统可移植性差、监控方式单一,不能很好地反映车间制造状态;缺乏监控系统理论模型;主要监控当前作业状态和追溯历史状态等。基于数字孪生的虚拟监控系统可实现车间制造资源的管控一体化,实现“以虚控实”;同时可以结合大数据分析和人工智能等技术,实现对车间制造流程的动态优化和设备的预测性维护。针对当前制造车间监控透明度低、方式单一、实时性差等问题,本文面向车间制造过程,提出一种基于数字孪生(Digital Twin),以工业物联网平台作为数据总线,能实时动态展示生产过程的车间三维可视化监控系统六维模型,并通过印章生产车间进行了验证。
1 车间三维可视化监控系统模型
1.1 基于数字孪生的三维可视化监控系统模型
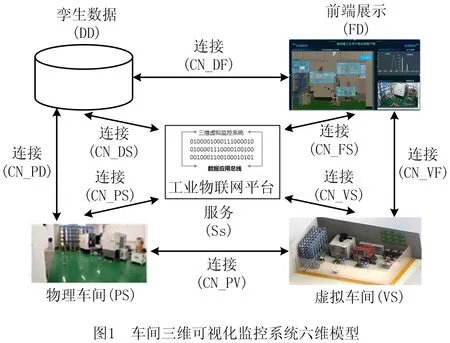
数字孪生也称为数字镜像、数字映射或者数字双胞胎。数字孪生最早的应用可追溯至NASA的阿波罗探月项目。在该项目中,NASA通过构建两个完全相同的空间飞行器,一个用于空间飞行,称为物理实体,另一个被留在地球上,称为孪生体。通过执行任务前对物理实体与孪生体的充分训练,使孪生体具有能够较为准确地反映物理实体运行状态的能力,从而实现对物理实体的有效监控[12]。近年来,数字孪生技术在电力、汽车、医疗、船舶、城市建设、交通规划等多个领域中展现出越来越大的应用潜能[13],数字孪生技术成为实现信息物理系统(Cyber-Physical Systems, CPS)的关键技术,但是由于缺乏通用的数字孪生理论模型和构建方法,阻碍了数字孪生在相关领域的应用。目前,数字孪生理论模型包括经典数字孪生概念模型[14]、数字孪生五维模型[13]、CPS 5C模型[15]、C2PS模型[16]等,这些理论模型可概括为数据、模型、服务三大核心要素,车间三维可视化监控系统需求与其一致。本文参考数字孪生五维模型[13]架构和C2PS模型[16]“云”部署方式,结合工业物联网平台强大的数据整合和系统集成能力,提出以工业物联网平台作为系统服务平台,基于数字孪生的车间三维可视化监控系统六维模型MVM,包括物理车间(Physical Shop,PS)、虚拟车间(Virtual Shop,VS)、服务(Services,Ss)、孪生数据(Digital Data,DD)、前端展示(Front-end Display,FD)、连接(Connection,CN),各维间的关系如图1所示。
MVM=(PS,VS,Ss,DD,FD,CN)。
(1)
(1)物理车间(PS)。PS是六维模型的构成基础,具有典型的层次化特点,按照功能及结构一般可分为设备级、单元级、产线级和车间级4个层次。以自动化生产车间为例,车间内各设备可视为设备级,是车间的最小组成单元;根据产品的工艺流程及工艺,参与同一工艺或工序的设备视为单元级,如自动化仓库单元、物流单元、机加工单元、装配单元、检测单元、包装单元等;生产同一产品或部件的各单元级设备组合构成的生产线可视为产线级;加工同类型产品或部件的各生产线构成的生产车间可视为车间级,如冲压车间、锻造车间、焊接车间等。
(2)虚拟车间(VS)。VS通过三维建模技术描述PS几何参数(形状、尺寸、位置等)与关系(装配关系),使其与PS具有良好的时空一致性。采用模型渲染技术、虚拟现实建模语言等对几何建模进一步完善,通过添加必要的灯光、材质、特效使VS具有真实的质感;同时,通过人机交互界面设计、外部输入事件响应等,实现场景漫游。
(3)服务(Ss)。Ss是指MVM实现过程所需服务的集合,主要由工业物联网平台、三维建模软件、虚拟现实开发软件等提供。根据应用需求的不同可将Ss分为功能性服务(Function Service,FS)和业务性服务(BusinessService,BS),FS为BS的实现和运行提供支撑。
Ss=(FS,BS)。
(2)
式中:FS主要包括:①面向VS提供的模型服务,如模型构建、模型渲染、虚拟场景搭建等;②面向DD提供的数据管理服务,如数据存储、数据清洗、数据封装、数据挖掘、数据融合、数据分析等;③面向CN提供连接支持,如接口服务、协议服务等。BS主要指面向FD的一系列服务,主要包括:①面向车间管理人员提供多种形式的监控手段,如监控大屏、增强现实(Augmented Reality,AR)眼镜、移动设备(手机、平板电脑、笔记本电脑等);②为FD提供实时驱动数据,并依据相关决策规则对人机交互进行反馈。
(4)孪生数据(DD)。DD是MVM运行的基础,DD主要包括PS数据(Dp)、VS数据(Dv)、Ss数据(Ds)和知识数据(Dk)。
DD=(Dp,Dv,Ds,Dk)。
(3)
式中:Dp主要用于描述构成PS的设备、厂房、灯光等物理要素属性数据,以及能够反映PS运行状态的动态过程数据,物理要素属性数据主要由设备厂方提供或实地测量,动态过程数据则通过传感器、设备接口、嵌入式采集卡、物联网技术等进行采集;Dv主要包括与VS相关的数据,如能够表示PS模型相关数据(包括几何模型、物理模型、行为模型以及规则模型等);Ds主要包括FS相关数据(模型、算法、决策规则、数据库操作等)与BS相关数据(模型动态过程数据,人机交互数据等);Dk包括专家知识、行业标准、常用算法、常用数据库、常用API接口、常用模型构建方法等。
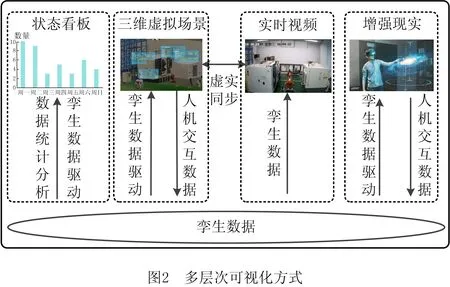
(5)前端展示(FD)。FD是MVM的展示维,所有的监控内容都将在这一维度上进行展示。由于车间生产过程的复杂性和不可预见性,传统利用数据报表、二维图表和组态软件的监控方式已经不能满足当前制造方式下的监控需求,从而导致车间管理人员无法在第一时间获取生产过程的准确信息,无法对生产异常状况做出快速响应、调整生产计划和指导车间生产。本文提出以三维虚拟场景和状态看板为主、以实时视频和增强现实为辅的车间多层次可视化方式,如图2所示。
1)三维虚拟场景,以三维虚拟场景模块作为主要监控方式,从物流、设备、产品3个方面对车间制造过程实现可视化管控;
2)状态看板,状态看板虽然在可视化效果上不如三维模型直观,但是在统计信息属性(时间、文字、数量等)方面具有不可替代的作用,可详细展示各生产资源的实时和统计信息;
3)实时视频,通过布置在现场的多个工业摄像头,实现对车间关键节点的实时、直观的监控;
4)增强现实,AR通过综合运用三维建模、实时跟踪注册、智能交互、传感器等多种技术手段,将虚拟信息叠加于真实世界,从而实现对真实世界的“增强”。基于AR技术实现设备内部运动状态的直观展示。
(6)连接(CN)。CN是实现MVM各部分互联互通的重要纽带,主要包括PS与VS之间的连接CN_PV,PS与Ss之间的连接CN_PS,PS与DD之间的连接CN_PD,VS与Ss之间的连接CN_VS,VS与FD之间的连接CN_VF,DD与Ss之间的连接CN_DS,DD与FD之间的连接CN_DF,FD与Ss之间的连接CN_FS。
CN=(CNPV,CNPS,CNPD,CNVS,CN_VF,
CN_DS,CN_DF,CN_FS)。
(4)
式中:CN_PV通过数据采集方式实时采集PS数据,并将数据传输至VS对应模型;CN_PS通过标准软件接口实现PS与Ss的双向通信,数据采集、传输、存储等;CN_PD可利用多种传感器、数据采集设备、标准/非标准通信协议实时采集PS数据,并传输至DD;CN_VS通过标准软件接口实现VS与Ss的双向通信,实现基于实时数据的模型驱动;CN_VF通过网络通信技术实现VS与FD的实时同步和动态交互;CN_DS通过标准数据库接口将实时数据存储到DD中,同时Ss通过对DD中历史数据的统计分析和常用算法、数学模型的调用支持Ss的运行;CN_DF通过TCP/IP、UDP等网络通信技术在Ss的支持下实现FD与DD之间的数据交互;CN_FS通过接口技术、网络通信技术、前端开发技术实现FD与Ss间的数据交互,Ss为FD提供界面集成服务、数据交互服务,并定义FD人机交互响应响应决策规则。
1.2 三维可视化监控系统开发流程
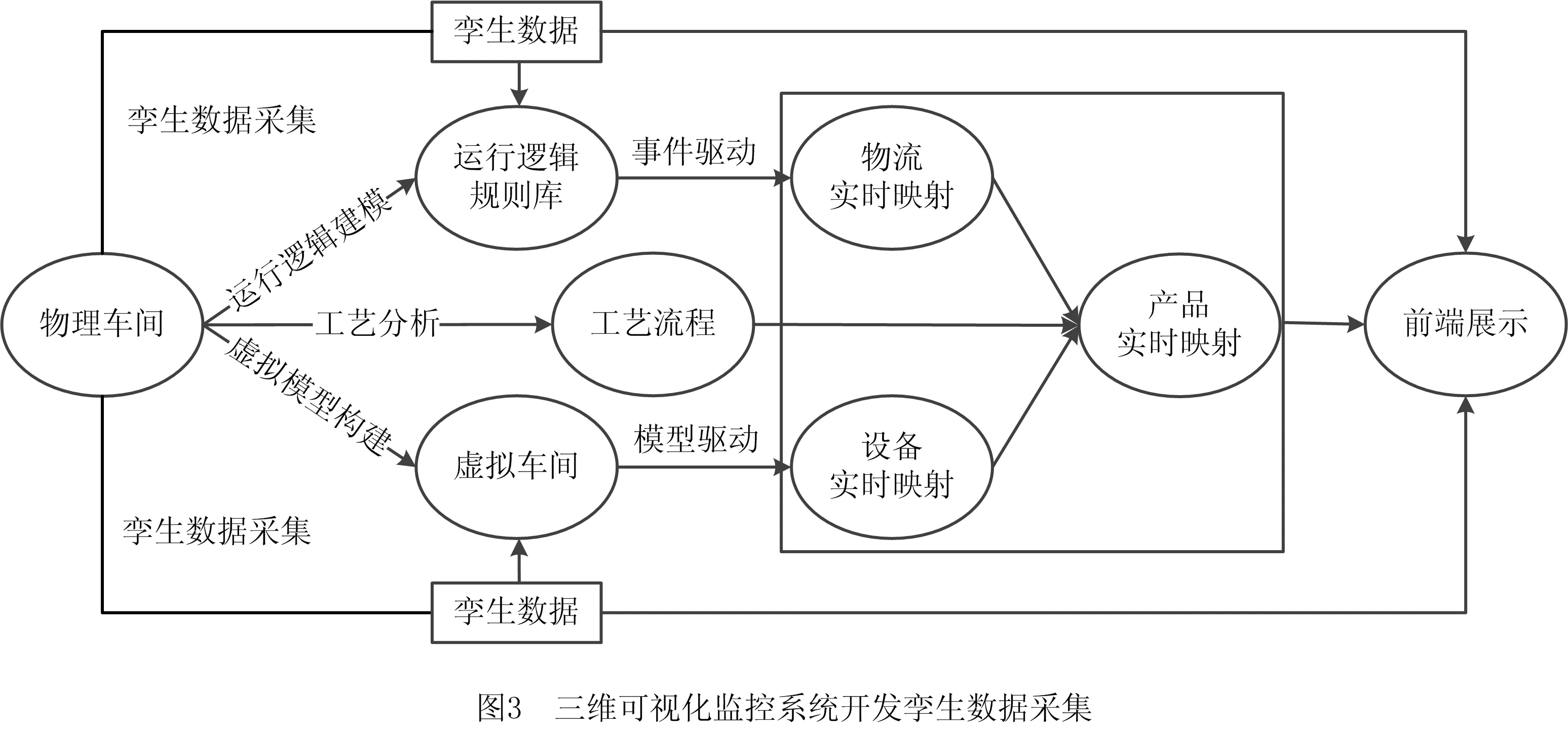
基于数字孪生的车间三维可视化监控系统开发流程如图3所示。物理车间(PS)到虚拟车间(VS)的映射是实现间三维可视化监控的核心,为建立真实的映射过程,需要建立车间生产系统作业模型,从而准确地描述车间动态行为。本文采用运行逻辑建模方法描述生产系统作业逻辑,通过将车间制造过程孪生数据(DD)转化为相应的车间事件,驱动设备状态的改变以及工件在不同工位间的流转,实现物流的实时映射。采用虚拟模型构建方法建立虚拟车间(VS)。采用事件驱动实现物流的实时映射、采用模型驱动实现设备的实时映射;由物流实时映射、设备实时映射结合工艺流程,实现产品的实时映射,最终通过硬件实现可视化监控的前端展示(FD)。三维可视化监控系统开发关键技术可总结为孪生数据的采集、车间虚拟场景构建以及数据的实时映射。
如何从车间海量、异构、多源的数据流中采集能够表征物理车间(PS)真实完整运行状态的孪生数据(DD),并实现三维可视化监控系统模型各维的互联互通是连接(CN)维需要解决的问题。工业现场的数据主要蕴含在设备中,设备数据可分为协议数据(包括总线型、API型数据)和传感数据,协议数据采集的方式主要有软件直接采集、采集盒子采集、协议转换模块等;传感数据的采集方式主要有多功能全面型数据采集器、集成式数据采集器等。虽然有以上方法可以采集数据,但是由于车间现场设备、传感器以及通信规范的多样性,如果单独为各种规范指定解析规则不但工作量大而且通用性差。虽然也存在一些标准化的协议,如OPC、MTconnect等,但是仍需要开发者自行编写程序实现车间数据的采集,而且并不是所有的设备都支持以标准协议的方式进行数据采集。
本文以工业物联网平台作为数据总线,借助工业物联网平台强大的设备接入、数据管理和系统集成能力,降低车间数据采集与管理的难度,以便于三维可视化监控系统的快速开发和部署。典型的工业物联网平台有COSMOPlat、OceanConnect Iot、ThingWorx等。以工业物联网平台作为数据总线的优势在于:
(1)设备接入能力强。通过平台集成的工业网关、中间件、嵌入式操作系统等成熟产品和解决方案,可快速构建平台与资源的连接,从而实现对人员、设备、软件、物料、环境等各类生产要素数据的全面采集。
(2)完善的数据服务。工业物联网平台基于开源开发工具以及微服务架构等方式,可灵活地为开发者实现基于情景驱动的数据服务。在车间三维可视化监控系统中数据应用情景主要包括基于实时数据为三维虚拟场景提供数据驱动和基于历史数据为监控系统提供决策支持两部分。
(3)系统开发效率高。工业物联网平台通过将技术、知识、经验等资源固化为可移植、可复用的工业微服务组件库,为开发者屏蔽了设备连接、软件集成与部署、计算资源调度的复杂过程,只需专注于系统功能的设计,显著提高了系统的开发效率。
基于工业物联网平台的数据采集流程如图4所示,以工业物联网平台作为数据总线,以高频无源射频识别(Radio Frequency Identification, RFID)采集物料信息,以OPC协议和设备软件开发工具包结合远程过程调用协议(Remote Procedure Call protocol,RPC)实现设备数据的采集;以JSON格式进行数据传输满足不同编译环境下的数据交换;基于REST FUL架构为虚拟车间(VS)和前端显示(FD)提供数据服务。首先通过多种数据采集方式实现车间数据的采集;然后基于分布式文件系统、NoSQL数据库、关系数据库、时序数据库等不同的数据管理引擎实现车间数据的分区选择、存储、编目与索引;最后,基于REST FUL架构的GET方法,实现上层应用与工业物联网平台之间的数据交换。
2 虚拟场景构建
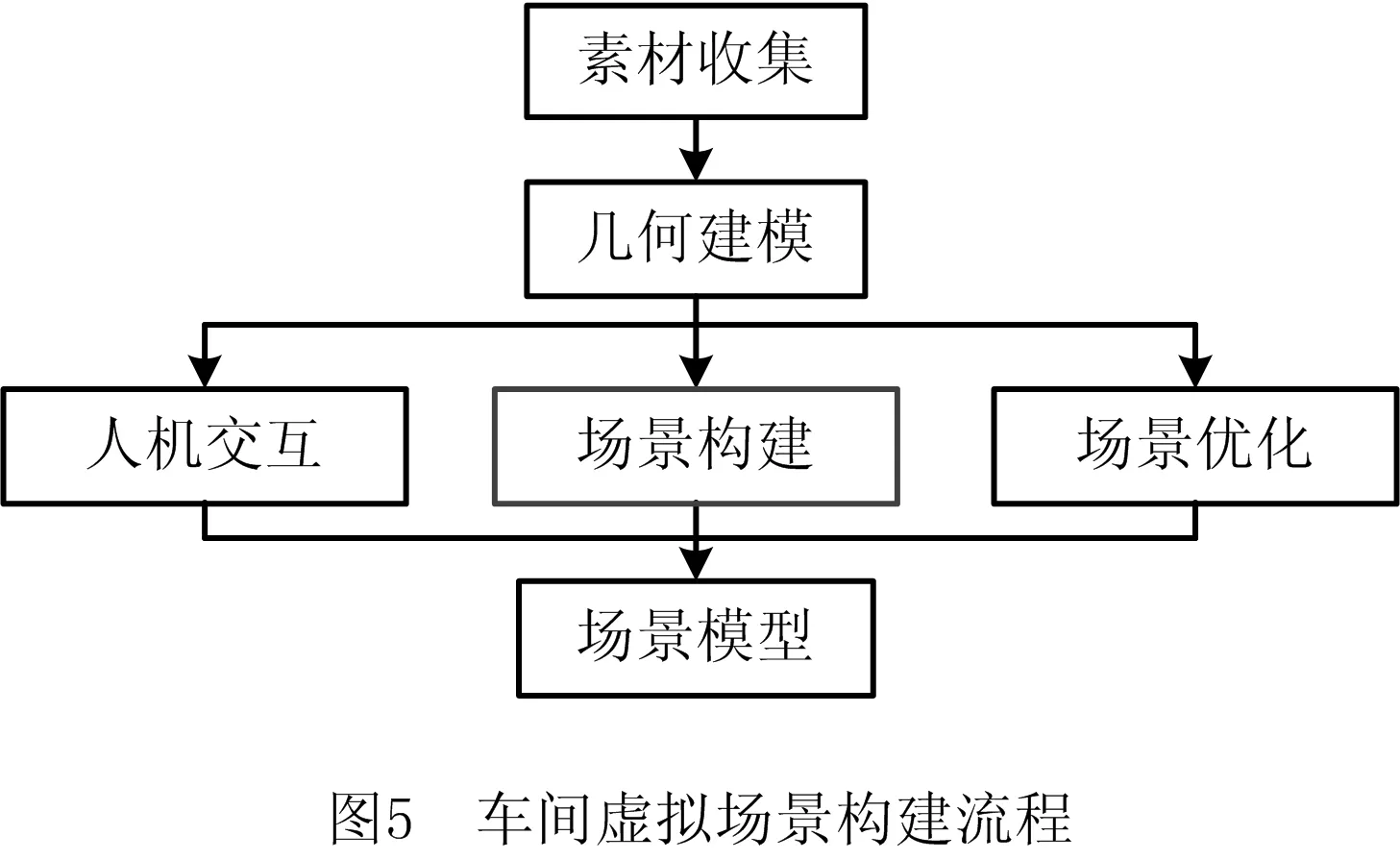
车间虚拟场景构建流程如图5所示,主要由几何建模、场景构建、人机交互和场景优化等构成。几何建模是虚拟场景构建的基础;场景构建是对几何建模的进一步完善,通过添加必要的灯光、材质、特效使虚拟场景具有真实的质感;人机交互包括人机交互界面设计、外部输入事件响应等,目的在于实现三维虚拟场景中的场景漫游;为了平衡虚拟场景绘制复杂度和绘制实时性之间的矛盾,保证大型场景下系统的流畅性,需优化虚拟场景,最终获得虚拟车间场景模型。
2.1 几何建模
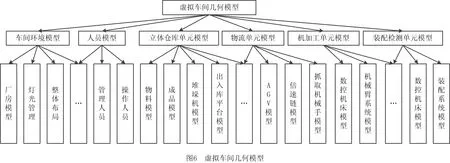
车间三维可视化监控系统通过孪生数据(DD)驱动模型实现车间运行状态三维可视化,为实现基于孪生数据(DD)的实时映射不仅需要对孪生数据(DD)进行有效管理,还需要对虚拟场景几何模型进行有效管理。本文采用“根—茎—叶”三层组织结构实现车间几何模型的管理,车间几何模型结构如图6所示。
车间几何模型以车间为根层次,以车间环境、人员、立体仓库、物流、机加工、装配检测单元为茎层次,以构成各茎层次的设备作为叶层次,从而以三层结构组织车间资源,在几何维度上准确描述数字化制造车间可能涉及到的人员、设备、厂房、物料等对象。针对设备层次的几何模型,则采用父子节点嵌套的组织形式实现模型的高效驱动。以六自由度串联工业机器人为例:首先将六自由度机器人中共同运动的部件组合成一个运动整体,可得到6个运动体,分别代表机器人的6个机械臂;其次,为便于定义各运动体的运动,采用子—父节点的组织方式从连接基座的运动体开始,定义前一个运动体都是下一个运动体的“父物体”,“父物体”只需考虑自身运动,而不用考虑“子物体”运动的影响。几何模型结构确定后可通过三维建模软件(如Solidworks、Creo等)建立车间几何模型。
2.2 场景构建
可视化监控系统要求创建的虚拟场景不仅具有良好的真实感和沉浸感,还具有良好的人机交互性能,以满足三维可视化监控系统六维模型服务(Ss)维的需求,因此在选择开发方式时应考虑以下几点:①系统应具有较强的模型构建和处理能力,支持常见格式的导入导出;②系统应具有强大的图形处理能力,能够满足复杂场景、大场景下图形的优化渲染输出;③系统应具有开源的接口,使用常见的面向对象的计算机语言(例如C++,C#,JAVA,Delphi,PHP等)进行编程,便于系统程序的开发。
虚拟场景构建涉及到几何模型的优化、渲染,虚拟场景的管理、视点漫游、碰撞体检测、粒子特效、UI界面设计以及系统集成等。目前,实现的方法主要包括:①三维动画制作;②基于OpenGL/Direct X等底层图形应用程序设计接口(Application Programming Interface,API)编程;③Web 3D技术;④多专业软件协同开发。前3种方法存在开发效率低的问题,目前普遍采用虚拟现实开发引擎(如Unity 3D、IdeaVR)结合模型渲染软件(如Maya、3d Max)的多专业协同开发方法,可以充分发挥各专业软件的性能优势,减少系统底层开发的工作量,降低系统的开发门槛,提高系统开发效率。
2.3 人机交互
三维虚拟场景与实时视频监控方式相比,其显著优势就是能够对人机交互事件进行响应,从而改变虚拟场景展示的内容。基于人机交互的场景漫游主要包括几何变换的实现和外部输入事件的响应,可通过鼠标点击事件、键盘操作事件等方式实现。几何变换是场景漫游的基础,虚拟场景中所有模型的运动、场景漫游都是基于几何变换技术实现的。几何变换是各种图形处理方法的基础,通过变换像素的空间位置,在新的空间位置上显示原坐标点的新位置,几何变换包括平移、旋转和缩放3种[18]。在三维可视化监控系统中,鼠标和键盘是最基本的输入方式之一。场景中如摄像机视角方向的改变、视距的远近、多场景的切换等可通过鼠标操作完成;场景中如摄像机视角方向的改变、前进、后退、左移、右移、上升、下降等可通过键盘操作完成。
2.4 场景优化
实时性作为三维可视化监控系统性能优劣的一个重要尺度,贯穿于三维可视化监控系统设计的全过程。尽管随着计算机图形软硬件技术的迅速发展,许多图元的绘制可通过硬件升级来实现加速,但是如果只依靠硬件性能远远满足不了大型复杂场景的实时绘制需求[18]。为了保证大型场景下虚拟场景的高质量流畅显示,解决虚拟场景绘制复杂度和绘制实时性之间的矛盾,须对虚拟场景进行优化。可通过软件从图形绘制算法入手,减少图形的复杂度并提高图形的实时生成能力。目前常用的方法有可见性剔除、数据库结构优化、多细节层次模型等[19]。
3 数据实时映射
3.1 多层次映射
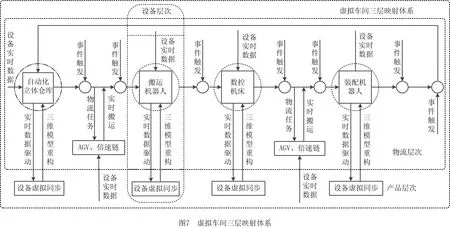
物理车间(PS)到虚拟车间(VS)的实时映射是实现车间三维可视化监控的核心。在车间运行期间,生产资源发生动态变化,为了形成能够覆盖车间制造全生命周期的可视化实时监控,本文从物流、设备、产品三方面建立基于孪生数据(DD)驱动的虚拟车间三层映射体系,准确地描述车间动态行为,如图7所示。
(1)物流层次 将车间制造过程实时状态数据转化为相应车间事件,驱动产品在不同工位间的流转实现物流映射。
(2)设备层次 设备的映射是虚拟车间(VS)三层映射体系的最小映射单位,通过物联网技术、传感器技术、接口技术等实现物理设备动作的实时感知,并基于孪生数据驱动虚拟模型实现物理设备在虚拟环境下的虚实同步。
(3)产品层次 产品的映射是在实现设备层次和物流层次映射的基础上,将产品的工艺流程、实时位置以及设备实时状态转换为车间事件,基于事件驱动的方法实现产品模型的动态改变,最终实现产品状态的实时映射。
3.2 运行逻辑建模
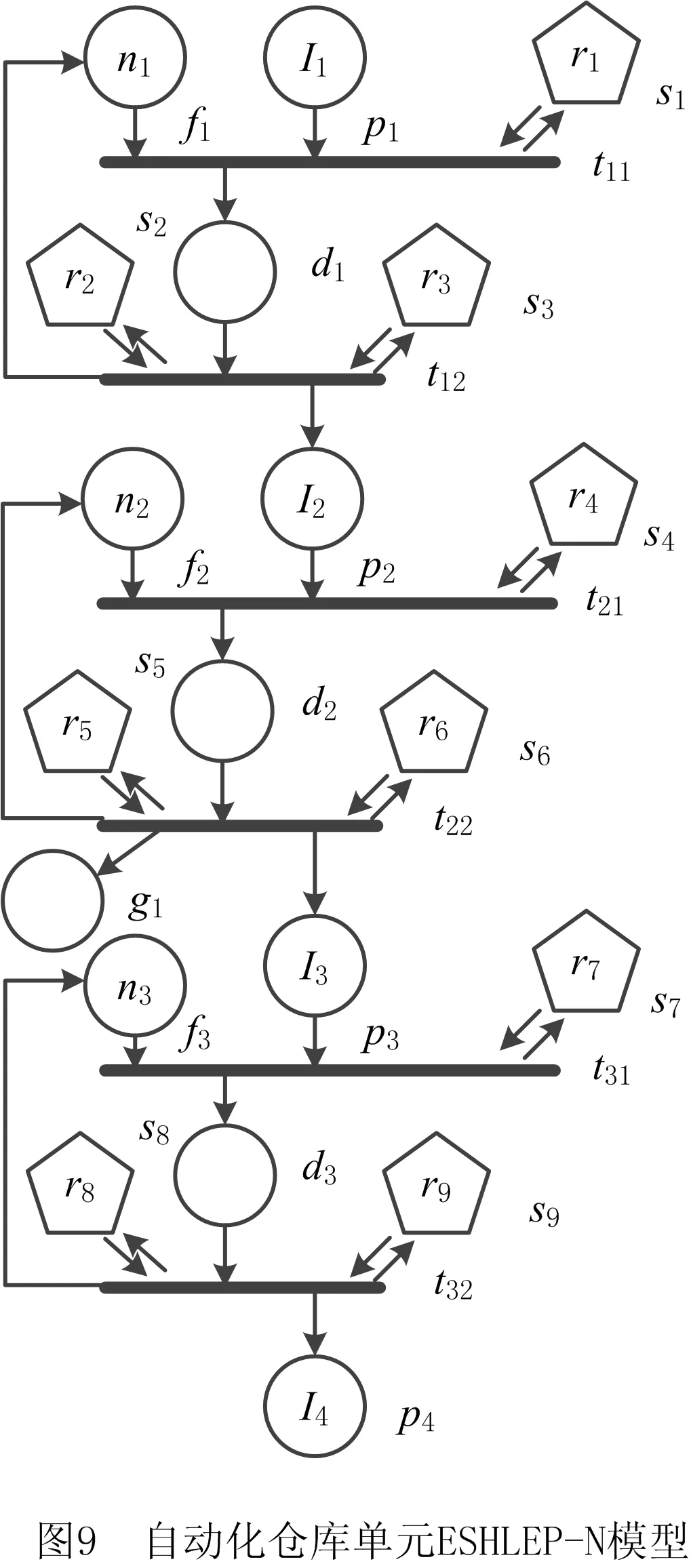
虚拟车间三层映射体系中的物流映射是基于车间运行逻辑模型动态映射框架实现的[11]。常见的车间运行逻辑建模方法有实体流程图、活动循环图、Petri网、排队论、极大代数法等[20]。混流自动化生产线是典型的离散事件动态系统,任务执行过程可表示为事件和状态,适合采用Petri网建模。Petri网是一种用来描述离散事件系统的数学建模语言,自20世纪60年代提出后,由于其形象直观、易于理解,在离散型制造业建模领域得到了广泛的发展与关注,并形成了面向不同领域的改进型Petri网[21]:①判断网(EP-N);②变迁网(TP-N);③着色网(CP-N);④高级网(HLP-N);⑤扩展随机高级判定Petri网(Extended Stochastic High-level Evaluation Petri Nets,ESHLP-N)。其中ESHLP-N方法定义了双重令牌(令牌:判断条件)和双重标识,不仅效果直观,还有利于分析系统性能;此外,通过调度规则的引入,提高了ESHLP-N方法的推理和决策能力,使其在柔性制造系统的建模、调度、仿真优化方面具有良好的效果。本文采用ESHLP-N方法描述生产系统作业逻辑,通过车间事件驱动生产系统状态转换,从而动态映射物理车间现场作业运行。下面以机加工单元为例,说明ESHLEP-N模型的建立过程。
物料出库,是自动化生产线的第一道工艺。即按照工艺需求,控制堆垛机从立体仓库中取出相应的物料,在经过视觉检测或RFID检验核对物料信息后,由物流系统转运至下道工艺的暂存区。自动化仓库单元的工艺流程图如图8所示。
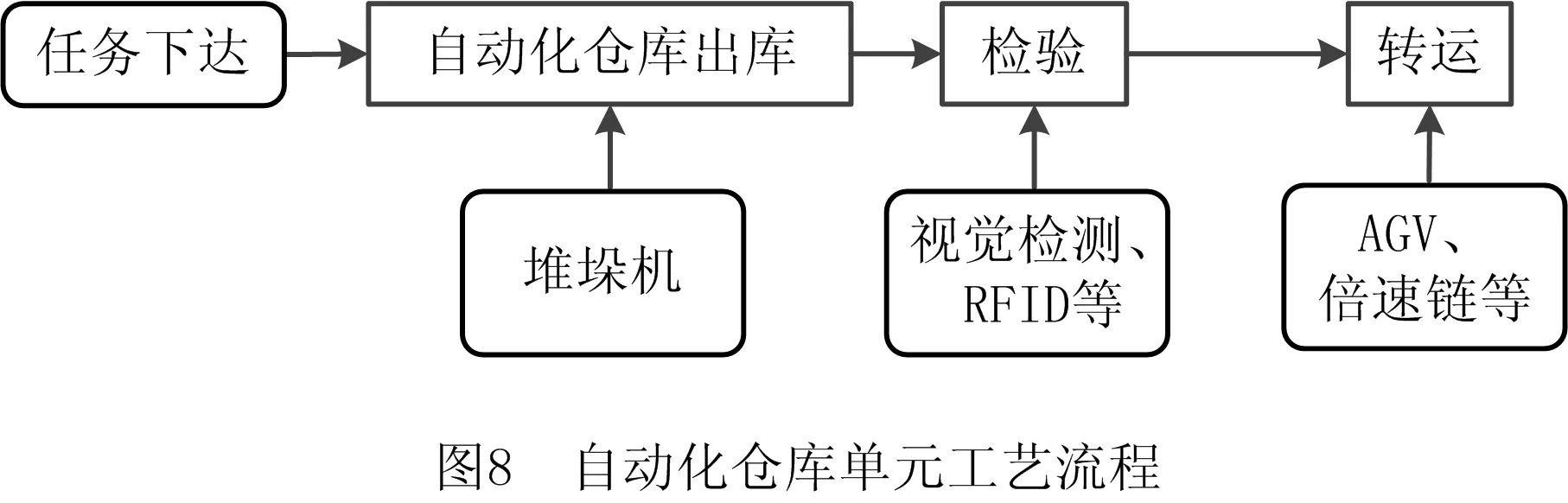

状态转换过程包括出库、校验和转运。d1表示物料出库库所;t11变迁表示堆垛机根据订单信息对物料进行出库操作。d2表示自动化设备通过RFID或者视觉检测的方式对出库物料进行检验的库所;t21变迁表示自动化设备准备检验出库的物料。d3表示物流系统进行运转的库所;t31变迁表示物流系统准备转运检验合格的物料。状态转换过程触发条件与触发结果可参考文献[11]。决策点s1,s4,s7规定了ti1变迁的规则,决定了物料的工序流程以及排队规则;s2,s5,s8决策点规定了ti2变迁的规则,复合令牌在di库所中停留一段时间,表示出库、检验、运转的过程;s3,s6,s9决策点规定了ti2变迁发生后令牌的输出规则,根据产品的工艺决定本工序加工完毕后的订单令牌Ii的去向。
3.3 孪生数据映射
基于孪生数据(DD)的实时映射是实现车间三维可视化监控系统的关键。虚拟车间(VS)构建方法不同,模型驱动方法也各不相同,表1介绍了两种模型驱动方法。
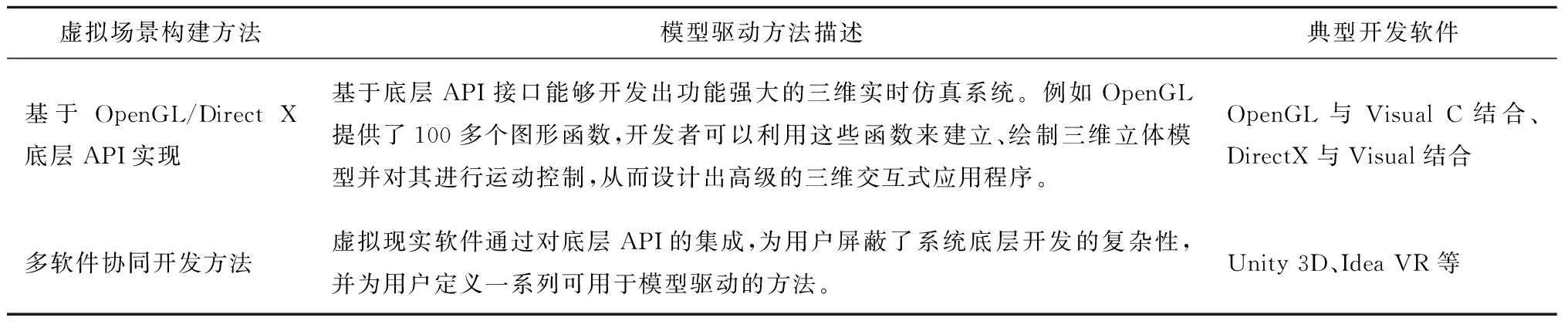
表1 模型驱动方法
4 系统实例
某印章自动化生产系统主要由自动化仓库单元、物流单元、加工制造单元、装配单元以及控制单元组成。自动化仓库单元由巷道式立体化自动仓库、堆垛机、出入库平台以及RFID识别系统构成,主要用于物料和成品的存储;物流单元由AGV、抓取机械手、图像识别系统、中转平台以及成品区构成,主要用于物流、成品、半成品在各工位间的流转;加工制造单元由精雕机、数控车床以及上下料机器人构成,通过对机器人控制系统与CNC系统的协同控制,实现机床自动化上下料,主要用于产品的加工;装配单元由装配机器人和旋转平台构成,主要用于印章的装配;控制单元由现场总控PLC、CNC系统、机器人控制系统、AGV控制系统、人机交互界面以及上位机构成。加工的产品有公章和私章两种,是典型的多品种、小批量生产方式。
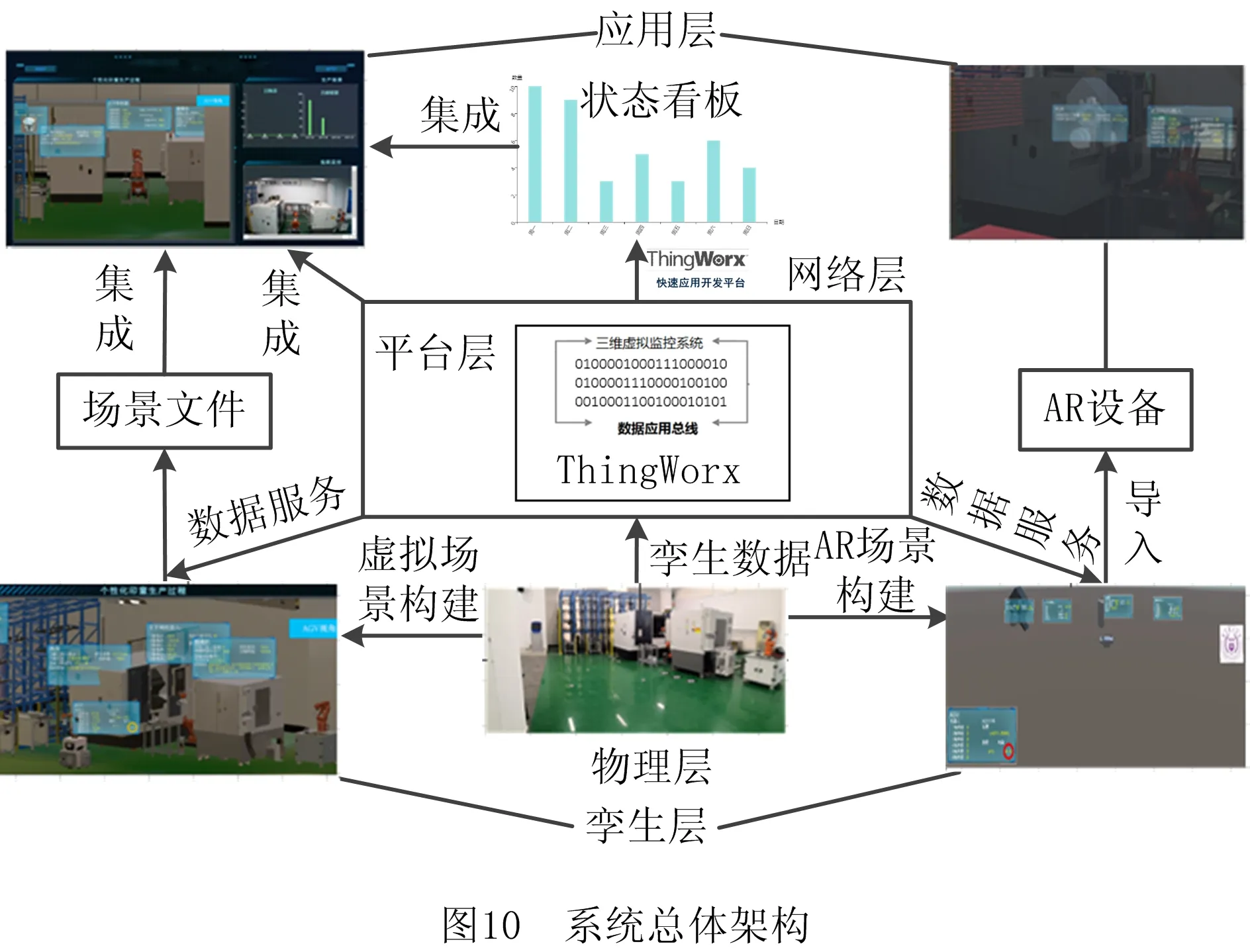
为实现生产过程的透明管控,根据前文提出的三维可视化监控系统六维模型,以ThingWorx物联网平台作为数据应用总线,以Creo、3d Max、Unity 3D多软件协同建模的方式,基于.NET平台设计并开发了印章生产车间三维可视化监控系统,总体架构如图10所示,由物理层、孪生层、平台层、应用层、网络层5部分组成:①物理层对应六维模型的物理车间(PS),是构成印章生产车间全要素的合集,包括人员、设备、物料、工艺流程、厂房等;②孪生层对应六维模型的虚拟车间(VS),通过多软件协同的方式构建两种应用环境下的虚拟车间(VS),实现物理车间(PS)的真实映射;③平台层对应于六维模型的服务(Ss)和孪生数据(DD),基于物联网平台强大的泛在连接、灵活的数据管理以及快速的应用开发能力,实现设备连接、数据采集、数据存储、数据服务、应用开发以及Web前端系统集成;④应用层对应六维模型的前端展示(FD),通过构建三维虚拟场景、状态看板、实时视频、增强现实实现多层次监控;⑤网络层对应六维模型的连接(CN),通过各种标准/非标准协议、有线/无线组网方式实现系统各部分的互联互通。系统整体运行效果如图11所示。

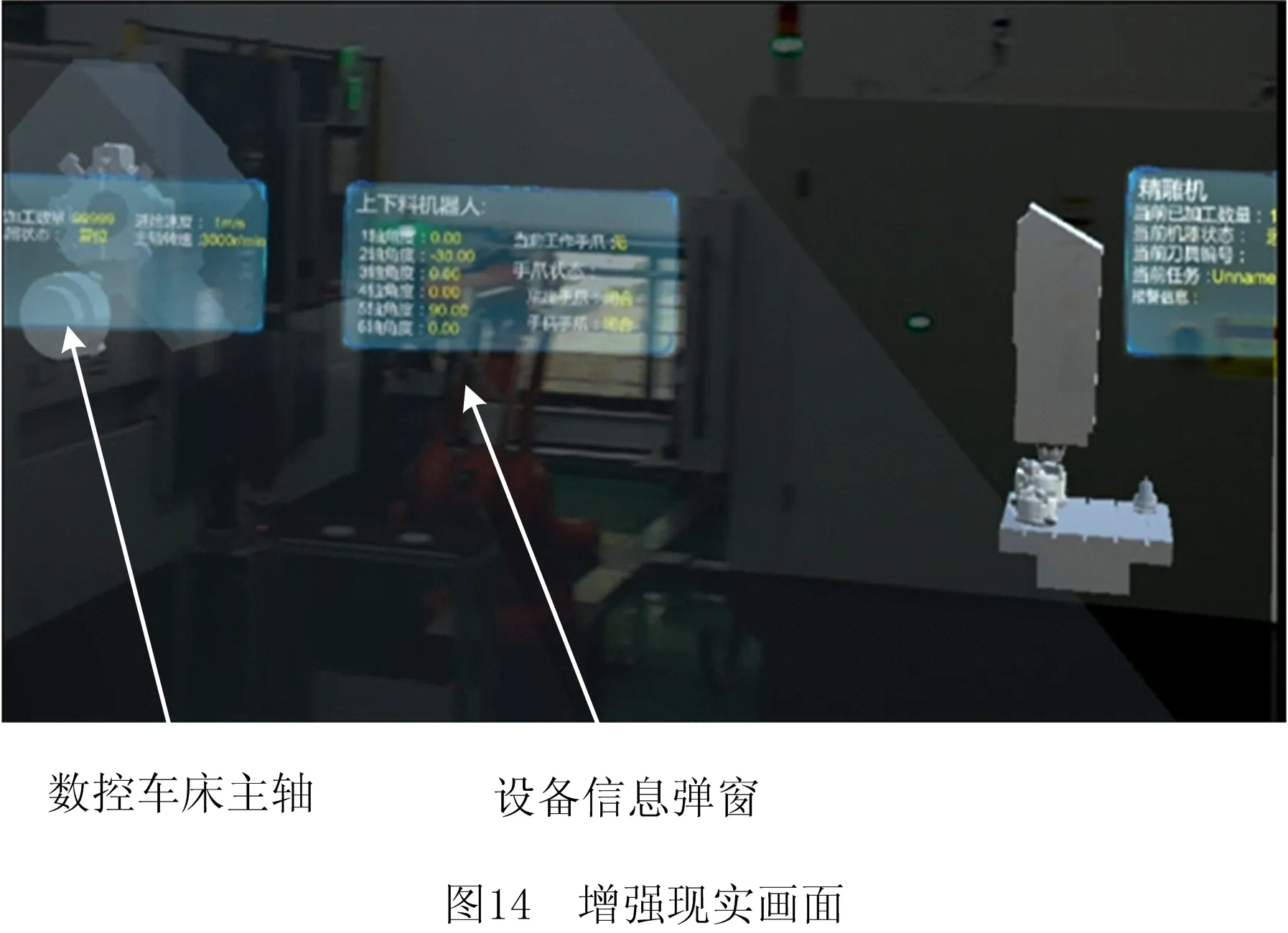
现场大屏监控显示三维虚拟场景、实时监控视频以及状态看板内容,如图12所示。其中三维虚拟场景可通过人机交互实现不同视角的切换,以直观沉浸的方式查看车间实时运行状态;实时监控视频用于展示固定视角的车间现场状态;生产报表主要展示印章生产车间每日产量及每月产量。除以上展示信息外,在三维虚拟场景中的自动化仓库、AGV单元、数控车床、上下料机器人、精雕机、装配机器人模型上增加了信息弹窗,以文本的方式直观地展示设备实时运行数据,丰富了监控形式。AGV运行信息弹窗如图13所示,该弹窗将AGV的位置坐标、温度、电量以及机械臂各轴的角度以一种直观的方式展示出来。AR场景主要以数控车床的主轴、刀具库和精雕机的三轴运动为监控对象,通过实时数据驱动,设备运行信息弹窗,将部分运行数据直接以文字的形式进行展示,实现对机床内部运动状态的实时可视化,如图14所示。通过对虚拟场景、数据采集方式、数据管理策略、实时数据驱动模型方法以及前后端数据交互方式的研究与优化,提高了监控系统的实时性。上线后的系统运行流畅、实时性好,经实际测试,虚拟车间(VS)与物理车间(PS)的延时大约为0.5s,能够满足实际生产过程中的监控需求,验证了三维虚拟监控系统的可行性和有效性。文献[3-8]构建的可视化监控系统监控方式较为单一,本系统增加了实时视频与增强现实,监控方式更为丰富,文献[11]构建的三维可视化监控系统延时在3 s以内,相较于该系统,本文系统实时性更优。


5 结束语
本文提出了基于数字孪生的车间三维可视化监控系统六维模型,并以印章生产三维可视化监控系统为例,验证了模型的有效性。通过基于工业物联网平台的孪生数据采集方法、构建车间多层次可视化方式等,解决了车间监控系统监控透明度低、方式单一、实时性差等问题。基于数字孪生的车间三维可视化监控系统最终目的是实现车间制造资源的管控一体化,本文只是实现了车间制造过程的实时监控,并没有与车间设备的控制系统进行连接,不能实现“以虚控实”。下一步研究将结合大数据分析和人工智能等技术,实现对车间制造流程的动态优化和设备的预测性维护。