基于人机工学的新型褥疮防治医用护理支架设计
2022-04-02杨蓝瑜花日瀚陈珈裕杨婉雯袁晓乐王远军
杨蓝瑜,花日瀚,陈珈裕,杨婉雯,袁晓乐,王远军
1.上海理工大学健康科学与工程学院(上海,200093)
2.上海理工大学出版印刷与艺术设计学院(上海,200093)
0 引言
褥疮是由于人体局部组织长期受压,发生持续缺血、缺氧、营养不良而致的组织溃烂坏死[1]。大量研究表明,长期卧床是褥疮主要的引发原因,中国住院患者中褥疮发病率为3%~14%[2],其中长期卧床引发的褥疮占褥疮患者的70%左右,由此可见褥疮发生率与人体局部受压时间成正比。当人体局部皮肤的体表压力高于32 mmHg(1mmHg=0.133 kPa)时,皮肤下层血管易受损,可发生变形或扭曲,导致局部血液循环受阻,发生坏死,进而形成褥疮[3]。减轻局部压力,控制受压时间和压力强度,及时翻身是最简单有效的预防措施。
在对市场上现有褥疮防治产品以及医学上褥疮防治的手段进行调查后发现,市面上现有褥疮防治产品主要包括褥疮圈、三角垫、充气床垫和护理床等。褥疮圈和三角垫适用于局部褥疮防治,对于长期被动卧床者来说,并无防治效果;而护理床和充气床垫普遍存在翻身时间滞后以及不适感强等问题。
我们鉴于现有产品的不足,设计出一款可移动式医用护理支架。我们支架能适时改变受压点的原理、参照人体尺寸以及医用病床参数设计,以旋转臂支架为主要机械结构。与其他褥疮防治方法相比,我们提出的新型医用护理支架不需要依赖人力,降低成本的同时提高了灵活性,集翻身、起背和曲腿功能于一身,优于市场上大多褥疮防治设备。
1 护理支架的人机工学分析
1.1 人体生物学特征分析
我们设计的新型医用护理支架的适用对象包括外伤导致的高位截瘫、高龄失能以及渐冻症患者等多种疾病导致长期卧床的群体。由于患者需长期卧床,力学因素的改变、理化因素刺激、医疗措施不当、营养状况不佳及其他的应急因素等,可能都会导致褥疮发生[5]。而长期卧床的患者多存在排便障碍及四肢瘫痪等症状[6]。褥疮患者卧床取仰卧位时,受压点主要位于肩胛部、臀部、肘、枕骨粗隆、足跟等处[7];取侧卧位时,受压点主要位于耳部、肘部、髋部、膝关节内外侧、内外踝等处。左右 30°侧卧位交替进行,2 h 更换一次,能让枕部、足跟骶尾部减压休息时间延长,促进这几处的血液循环[8]。另外,膝间垫高、双下肢错开屈曲,减少皮肤间摩擦也是褥疮防治中的重要护理方法。
1.2 可行性以及操作者特征分析
新型护理支架操作者包括医院、养老院的护工以及患者家属等护理人员。患者的日常生活(包括进食、沐浴、如厕等)和定时翻身均需要护理人员完成。我们提出的用于褥疮防治的新型护理支架为护理人员提供了一种全新的方法,在满足褥疮防治需求的同时,可以有效减轻护理人员的负担、避免高强度工作导致的肌肉骨骼疾病。
2 护理支架机构设计
褥疮常见于脊髓损伤的截瘫患者和老年卧床患者等行动不便人士,在康复治疗中,定时改变患者体位是防治褥疮最有效的方法[10],我们设计了一款新型护理支架,不仅可以帮助患者翻身、改变并保持体位,还可以用于短距离的移动患者。其设计思路如图1 所示。

图1 新型护理支架设计思路Fig.1 New nursing support design ideas
新型护理支架由抬杆、抬臂、旋转臂、以及电动推杆等部分组成,其中4 种电动推杆统一由支架内部电机驱动。导轨中设置电动推杆,用于推动整个主体部分上下移动,以适应不同护理床及病床的高度,扩大适用范围。总体结构如图2 所示。

图2 新型护理支架总体结构图Fig.2 General structure drawing
考虑到卧位姿势不同的患者的受压点有所差异,支架设计思路根据人体承重生理分析划分成头部、躯干部、下肢部3 个部分。负责上肢与躯干的2 个支架部分与下肢分开,每个组件可独立运行,但统一由滑道中电动推杆调整整体高度。旋转臂旋转区间为0°~90°,见图3(a),保证收纳的便捷性的同时对抬臂和抬杆的角度调整起前提作用。对侧翻功能直接起作用的抬杆,由具有自锁功能的艾迪特公司的ANT-38 小型电动推杆,推动绕旋转支点改变角度,保证被动卧床者的侧翻区间为0°~30°,见图3(b),完成转移、起背以及曲腿功能的抬臂由其下方的选用艾迪特公司的ANT-38 小型电动推杆,负责使用角度的调整与固定[11]。抬杆和抬臂通过改变被动卧床者卧姿受力点,从而有效预防褥疮的发生。

图3 新型护理支架结构与运动区间示意图Fig.3 Main mechanism structure and motion interval schematic
新型护理支架每个组件可独立运行。对于下肢失能患者而言,下肢抬臂置于腘窝下方,其可升高的特点保证了曲腿、抬腿功能的完成;头部、躯干部可帮助高位瘫痪、植质状态、不可逆昏迷等患者改变躯干体位并固定,完成侧身、偏头等基本动作;3 部位抬臂同时使用时还可以实现对患者的移动功能,底座下方附轮(可自锁)方便使用者移动,抬臂运动角度区间为0°~15°,见图3(c),这保证了实现移动功能时的稳定性及安全性。
我们设计的新型护理支架其抬臂旋转中心与人体各部位质心位于同一水平面上,使运用时被动卧床者与护理产品之间产生的摩擦力最小。
3 护理支架仿真设计
3.1 运动功能人体仿真
Jack 软件是一款代表性的人体仿真与工效分析软件,具有数据准确、功能丰富的特点,适用于任务环境下的人体行为动作的仿真研究[12]。因为受者本身可能处于无意识状态,因此采用Jack 虚拟仿真数字人模拟健康人体起背、屈腿、侧身,进行不同姿势分析、关节受力评估。Jack中一个数字人体模型包含69 个部位和68 个关节以及135 个自由度,在进行数字人体模型创建时可以自定义数字人体模型的身体的各个尺寸数据,使得人机功效分析更加具有针对性和准确性[13]。为保证受力结构稳定,设定数字人参数如下(见图4):男性,身高175.49cm,体重77.69kg 仿真分析关节包括右腕前屈,左腕前屈,右上肢前屈,左上肢前屈,躯干前屈,后屈,采集数据囊括、力矩(Nm)、肌肉效应、Jack 度(deg)、力量平均值(Nm)和强度标准偏差(Nm),用数字人仿真结果分析后进行验证,进而确立尺寸及功能角度设计。

图4 起背、屈腿、翻身仿真界面Fig.4 Stimulation of Back up,Roll over and Leg Bend
3.2 尺寸及功能角度设计
为了最大化适用人群,在进行尺寸设计时参考中国医疗器械注册产品标准监管要求[14]以及中国成年人人体尺寸GB 10000—88[15]。人体生理尺寸见表1[16]。
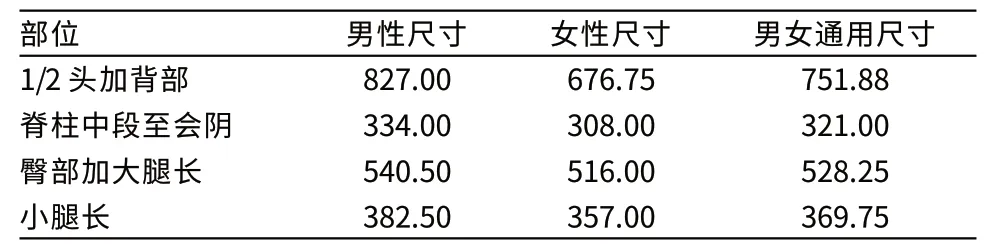
表1 人体生理尺寸Tab.1 Size of Human Body(mm)
最终确定抬臂、抬杆长度500 mm;头部与躯干部相对滑道中心轴而言伸缩区间为400~800 mm;滑道中间电推杆适应不同床体高度,进程为360~950 mm(见图5)。在数字人仿真实验中可以得出结论,当起背角度介于5°~45°之间时便可以在人体关节承受范围内起到褥疮防治的作用。在体位管理中,30°侧卧更换能更好地减轻骨突压力,特别是减轻身体对股骨粗隆、两侧髂嵴的垂直压力,让一部分重力落在臀大肌平面上,另一部分重力落在支架软垫上,让压力被分散掉,促进骨突部位血液循环,避免形成褥疮[17];对下肢部功能参数分析可得,人体下肢各关节角度范围分别为踝关节90°~110°、膝关节100°~140°、髋关节95°~115°[18]。根据实验可得在膝关节的角度α接近110°时患者生理舒适度达到最高[19],如图5 所示。由人体下肢长度分析可得,臀部加大腿长528.25 mm,小腿长369.75 mm,当α=110°时膝关节位于床上方高度247.61 mm 处。对以上所有动作定量分析后可以得出新型护理支架最优的技术参数。

图5 被动卧床者姿势示意图(床面水平方向)Fig.5 Schematic diagram of passive bedridden posture(horizontal direction of bed surface)
3.3 接触人体面
软垫与被动卧床者身体直接接触,但在手臂运动的同时,由于摩擦力作用,受者的衣服会堆积,引起受者不适,影响褥疮防治。护理支架的设计中,在软垫内部填充剪切增稠流体填充物(由分散相粒子、分散介质和表面活性剂组成)[20],可以提高软垫与被动卧床者身体的贴合程度,使身体与手臂接触部分受力均匀,减少被动卧床者身体由于受力集中而产生褥疮的现象,还可阻止因为被动卧床者无意识的运动而造成的衣物挤压,从而提高舒适感。软垫表面使用抗菌的塑胶材料[20],塑胶材料具有适当的强度和弹性,在实现起背翻身功能的同时,能兼顾舒适性和卫生安全。
4 护理支架运动学及力学分析
4.1 运动学分析
新型护理支架主体机构运动简图如图6 所示。

图6 主体机构运动简图Fig.6 Schematic diagram of main motion mechanism
由图可见,护理支架主体共有10 个活动构件。1、3、6、9 为原动件电动推杆,2、4、5、7、8、10 为从动件。1 和2,3 和4,4 和5,6 和8,7 和8、7 和9 之间组成转动副,2 和3,5 和6,9 和10组成移动副。其工作原理为:电动推杆1 使主体部分上下移动,电动推杆3 使旋转臂转动,电动推杆6(鉴于电动机功率问题,实际有两个电动推杆同时控制,由于结构完全对称,不在简图中画出)使手臂上下转动,电动推杆9 使手臂实现侧翻功能。这便实现了4 自由度的机构运动,与其他机构类型相比,不会造成自由度的剩余,因此可降低成本,提高效率。
4.2 力学分析
在设计中,参考同类产品与国家标准,制定了最大载重为100 kg 的设计目标,基于起背范围(0°~84.5°)的动态分析,当旋转臂0° 角度时候所需的推力最大,在推杆选型的过程中,需满足此时的推力。旋转臂0° 角时机构如图7 所示。

图7 零角度旋转臂机构简图Fig.7 Schematic diagram of zero angle rotating arm mchanism
在侧面翻身机构中有两个任务目标,需要同时满足侧翻(5°~45°),和抱起(抬臂内翻,防止受者滑落)。侧面翻身机构如图8 所示。
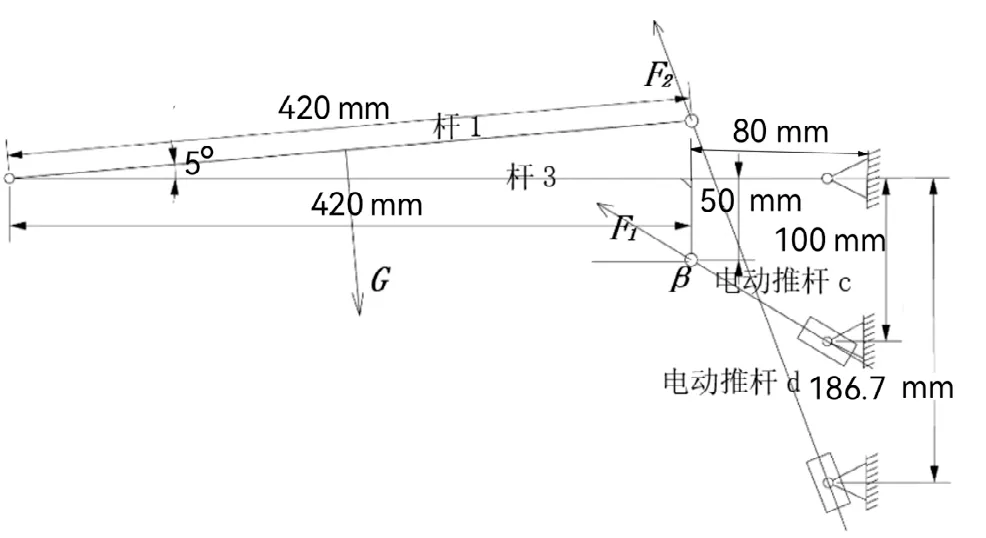
图8 侧面翻身机构简图Fig.8 Schematic diagram of side turning mechanism
侧翻机构由抬杆1 与电动推杆a 组成,其中G为重力鉴于安全性要求,侧翻机构的力学验证将在不考虑病床支持力的情况下,由侧翻机构独自完成翻身,以满足更加严格的安全标准,应对复杂的侧翻情况。
4.3 人机匹配度仿真
在设计新型医用护理支架时,进行creosote建模,构建该机械结构尺寸数据,导入Jack 进行人机匹配度分析。本护理支架集屈腿、起背、翻身、搬运多种功能为一身,平躺和搬运姿势下人机匹配度如图9、图10 所示。结果显示,本新型护理支架能够达到的平躺、起背和曲腿等功能,并且受者尺寸与支架尺寸匹配度较好。

图9 平躺姿势下人机匹配度图Fig.9 Man-machine matching in flat position

图10 搬运姿势下人机匹配度图Fig.10 Man-machine matching in transport position
4.4 运动控制
新型褥疮防治护理支架采取12 个独立的直流电动推杆作为驱动部件,其线路埋于支架外壳内部,连接于控制面板。操作者可根据不同的需要调整旋转臂和抬臂角度。
5 结语
我们针对褥疮防治提出一种创新的护理支架设计方案,鉴于现有产品难于满足患者护理的需求,支架同时增加了短距离转移病人的功能。设计方案是参考护理人员帮助病人起背、屈腿、翻身、抱起,以机械结构代替人完成这4 个动作,关键机构旋转臂、抬臂均模拟人手臂的结构而设计。仿生设计使医用护理支架的使用与护理人员的护理方式类似,病人更有熟悉感,有利于缓解病人对于陌生机械产品的恐惧心理,一定程度上解决了病人对于现有护理床和充气床垫使用的不适感等问题。
与其他护理设备相比,我们提出的新型医用护理支架对于人力的需求较低,简单的结构设计降低成本的同时提高了灵活性,集翻身、起背、曲腿和搬运功能于一身。
但是本设计方案存在缺少电路控制和集成系统的不足,因此如何设计电路和集成控制,方便护理人员操作将成为未来的研究方向。