一种软体末端执行结构设计与试验分析
2022-03-30曹淼龙杨元健张波CHIWAWATafaraAustine
曹淼龙,杨元健,张波,CHIWAWA Tafara Austine
(1. 浙江科技学院 机械与能源工程学院,杭州 310023; 2. 浙江理工大学 机械与自动控制学院,杭州 310018)
随着科技水平的提高以及经济社会的发展,机器人在日常生产生活中发挥着越来越重要的作用。广泛应用于生产制造、交通运输、医疗健康等领域[1]。
与传统的工业机器人上的刚性末端执行器相比,软体末端执行器因为其人机交互更安全、柔顺性好且可自由改变自身形状等特点受到得到国内外许多学者的关注和研究[2-6]。
软体末端执行器通常用柔性材料制作而成。Guo等将硅胶制成的气动夹持器与电子附着夹持器相结合,既能抓取扁平的物体,又能抓取形状复杂的物体[7]。Yuen等发明了一种将形状记忆合金包裹在热塑性纤维上的可变刚度驱动器,以制造一种多功能机器人面料[8]。Otake等采用电活性聚合物凝胶制作了一种仿海星软体机器人。该机器可以通过控制电场的空间变化实现翻转[9]。
本文研究的末端执行器直接用TPE材料3D打印而成,与常见的先打印模具再硅胶浇注成型的方法相比,简化了步骤,降低了制作成本[10]。通过拉伸试验,计算出所用材料的材料系数,用有限元软件基于Mooney-Rivlin模型分析其弯曲性能[11],并通过试验验证仿真结果。进行抓取试验,表明其在在农业领域,抓取表皮易损果蔬中有一定的应用前景。
1 执行器结构设计
1.1 执行器弯曲原理
目前,常见的软体末端执行器通常由两大部分组成——膨胀层和限制层。工作原理为:向柔性材料制成的具有腔室的封闭体内冲入一定气压的气体,整个腔室(膨胀层)将发生膨胀形变,若用一定的方法限制住执行器的一侧形变(限制层),整个执行器将向限制层弯曲[12]。
1.2 执行器建模
根据执行器的弯曲原理,结合本研究的需要,设计了如图1所示的执行器。总体上看类似于人的手指,有3个“关节”可实现弯曲。

图1 执行器模型
执行器剖面结构如图2所示,整个执行器长为80 mm,宽为16 mm,高为20 mm,具体尺寸参数如表1所示。

图2 执行器剖面图

表1 软体执行器尺寸参数
执行器底层较厚,“关节”处较薄,充气受到相同的应力时,关节处更容易发生弯曲。
2 有限元分析
2.1 TPE的材料特性
由于执行器由3D打印而成,打印温度、填充密度等都可能影响材料参数,所以按照GB/T 528-2009标准,制作试样并进行单轴拉伸试验,如图3所示。式样总长度为113 mm,哑铃状长度为33 mm,哑铃状厚度为2 mm,哑铃状宽度为6 mm。

图3 拉伸试验
在Abaqus中采用Mooney-Rivlin模型进行有限元分析,该模型适用于中小应变的超弹性橡胶,一般默认橡胶材料的各向同性和不可压缩性(I3=1)的一般应变能表达式为
W=W(I1,I2,I3)
(1)
其中:
(2)
式中:Ii为变形张量;λi为伸长比。
2参数表达式为
W=C10(I1-3)+C01(I2-3)
(3)
式中Cij为材料常数。
TPE应力-应变关系可由应变能函数W对主应变λ求偏导表示,可得主应力ti与应变λi关系表达式如下:

(4)
式中ti为主应力。
在单轴拉伸状态下有
(5)
化简得:

(6)

(7)
综上可求得

(8)

2.2 弯曲性能
在Solidworks中建立执行器模型,导入Abaqus中,设置材料为TPE,材料参数C10=0.620 4,C01=-0.210 4,部分仿真结果如图4a)所示,从上到下对应的气压分别为0、0.08 MPa、0.12 MPa、0.16 MPa、0.2 MPa、0.24 MPa。分别在未充气和充气状态时连接顶端与末端,所形成的夹角定义为弯曲角α,如图4b)所示。

图4 仿真效果
根据仿真结果绘制充气压强——弯曲角度曲线,如图6所示。由图可知当充气压强为0时,弯曲角度也为0,随着充气压强的增大,末端执行器的弯曲角度也随着增大,呈非线性关系。
3 试验
3.1 执行器制作
在Solidworks中建模后另存为STL格式,再导入到软件Cura中切片,主要打印参数如表2所示。打印机喷嘴直径为0.4 mm,为了便于打印且尽可能保证执行器的密封性,执行器壁厚应为0.4的整数倍。
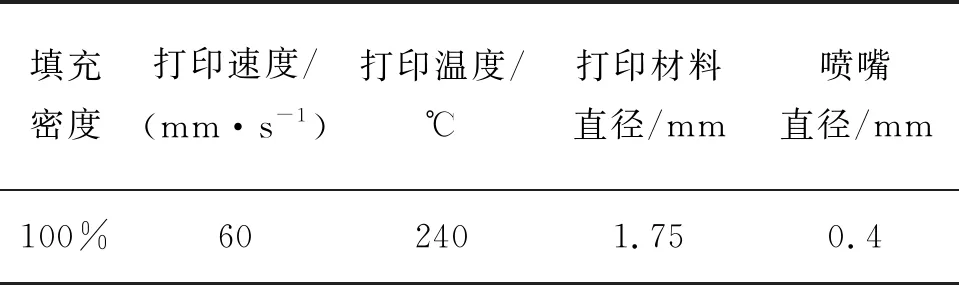
表2 主要切片参数
3.2 弯曲性能试验
搭建如图5所示实验台,使用TJ-800型空压机作为气源,用PU软管将气压表和软体驱动器连接,放置于网格纸上,通过流量阀调节输入气体压强。
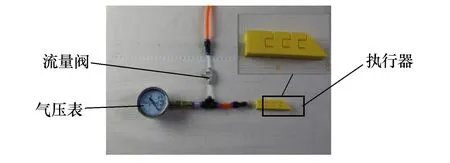
图5 弯曲性能试验台
在网格纸上标记好首段以及不同压强下的末端位置,按弯曲角度定义测量弯曲角度。仿真与试验具体结果如表3所示。

表3 不同压强下仿真与试验弯曲角度
为直观比较试验结果与仿真结果,在同一坐标系下绘制压强——弯曲角度曲线,如图6所示。

图6 试验压强-弯曲角度曲线
由图6可知,总体弯曲趋势相同,也呈非线性关系。原因可能为:1) 从图3c)可以看出应力应变曲线呈非线性说明打印材料(TPE)的力学性能具有一定的非线性;2) 执行器结构较复杂且不是绝对密封,充气时存在漏气现象,执行器受到的压强非线性。实验弯曲角度小于仿真弯曲角度且随着充气压强的增大差值也增大。原因可能为:1) TPE材料参数计算结果与实际值存在误差;2) 随着充气压强的增大,执行器位移增大无法稳定在指定点,导致测量误差增大。
3.3 抓取试验
为验证所设计执行器抓取性能,需搭建试验平台进行抓取试验。根据两指抓取的工作原理设计一种可调节两执行器间距的模块化夹具,如图7所示。

图7 夹具
夹具由TPE材料3D打印而成,分为滑道和滑块两部分,可根据加持物的大小滑动滑块,调节执行器间距。
将所设计的执行器固定在台架上,气源为TJ-800型空气压缩机,功率为800 W,储气量为30 L,排气量为60 L/min。可以准确对执行器进行充气、气压保持、放气等操作,通过流量阀准确控制执行器进气量。台架如图8所示。

图8 试验台架
考虑到软体执行器柔顺性好等特点,选取日常生后中不同形状、大小的常见物品进行抓取试验,物品尺寸及质量如表4所示,抓取结果如图9所示。

表4 抓取物品尺寸及质量

图9 抓取试验
通过滑动滑块,调节执行器间距成功抓取螺栓,说明设计的机械爪具有一定的适应性;成功抓取猕猴桃,且未损坏表皮,说明该执行器可以应用于易破损的果蔬抓取中;电蚊香以及鼠标的成功抓取说明执行器可以实现对表面光滑的轻质物体进行夹持。
根据Howell方程,弹性体摩擦力为[14]
F=(KNβ-1)N
(9)
式中:F为摩擦力;KNβ-1等于摩擦因数μ;N为法向力(执行器施加于物体的抓取力),对于大多数聚合物β<1[15]。
Howell方程表明有效摩擦系数随着施加力的增大而减小[16]。综上,由于本执行器是柔性的,对于不同的抓取对象无法单纯通过摩擦系数来研究抓取能力。未来,在研究应用于智能农业果蔬无损采摘时要基于滑觉检测优化无损采摘控制系统[17]。
4 结论
1) 设计了一种具有3个关节的仿人手指柔性末端执行器,用TPE材料3D打印而成,用Abaqus基于Mooney-Rivlin模型分析其弯曲性能。
2) 进行弯曲性能试验以及抓取验证了其性能。抓取试验表明其对质量为0~100 g的物品有较好的抓取效果,通过调节夹具滑块使其对不同直径的物品也有较好的适应性。
3) 试验表明其对表皮易破损的果蔬有较好的抓取效果,在智能农业果蔬的无损采摘、分拣中有较广阔的应用前景。
