基于多物理场信号相关分析与支持向量机的离心泵故障诊断方法
2022-03-27孙原理宋志浩
孙原理, 宋志浩
(1.清华大学 核能与新能源技术研究院,北京 100084;2. 海军研究院,北京 100161)
离心泵是国防和工业领域中广泛应用的一类机械,并且往往是系统的核心部件,其运行状态关系整个系统的可靠性和安全性。大部分离心泵工作环境恶劣,由于长期环境腐蚀和磨损等因素,极易引发轴承与叶轮部件损伤等机械故障。当离心泵存在故障时,及时发现并排除能够有效避免因故障带来的经济损失。因此,对离心泵的运行状态进行监测和故障诊断对于提高设备效率以及安全可靠性具有重要意义。
近年来,以卷积神经网络为代表的深度学习技术用于旋转机械设备智能故障诊断备受研究学者关注[1-2]。由于离心泵的振动信号受负荷、流体介质影响,具有较强的非平稳性和较低的信噪比,如何从这种复杂的振动信号中提取离心泵故障特征一直是离心泵故障诊断研究的热点和难点。针对离心泵的轴承滚子磨损、内圈磨损、外圈磨损和叶轮磨损等4种故障状态,文献[3]对振动信号双谱图,通过加速鲁棒特征和t-分布随机近邻嵌入提取(t-distributed stochastic neighbor embedding,t-SNE)技术提取特征向量,并应用概率神经网络进行了故障模式识别。利用卷积神经网络的图像分类能力,通过一维振动信号转换为二维灰度图像[4]或利用信号的S时频变换[5]、连续小波变换[6-7]得到二维时频图像,对Lu等研究中的离心泵故障数据集进行了模式分类研究,得到了较好的诊断效果。此外,为克服噪声对振动信号的干扰,文献[8]研究了深度压缩自编码技术用于低信噪比环境下的离心泵故障诊断。
在机械设备故障诊断领域,支持向量机(support vector machine, SVM)也得到了广泛应用[9-10]。SVM是Vapnik[11]提出的,在统计学习理论基础上发展起来的一种机器学习方法,主要用于解决分类、回归或异常检测问题。相对于深度学习技术,SVM不需要大量的数据样本支撑,可以在训练样本有限时取得较强的泛化能力,这一特点适合于设备故障数据集有限的工程现状。王新等[12]提出了一种基于经验模态分解SVM的滚动轴承故障算法,能够在小样本条件下实现较高的诊断效果。何大伟等[13]针对样本不均衡问题,提出了改进FOA(fly optimization algorithm)优化的CS-SVM(cost-sensitive support vector machine)故障诊断方法,结果表明该方法能够有效处理样本不均衡导致的分类代价不同问题。饶雷等[14]提出了一种CNN-SVM(convolutional neural networks-support vector machine)和特征融合的齿轮箱故障诊断模型,可对多个振动信号传感器数据进行融合诊断,并且取得很好的效果。国内外也有许多学者将SVM应用于离心泵故障诊断中。Zhang等[15]提出了一种基于变分模态分解和SVM相结合的方法对多级离心泵的滚动轴承进行的故障诊断,结果表明该方法能有效提取到不同故障下的故障特征并精确识别。Muralidharan等[16]使用连续小波变换和SVM对整体式离心泵进行故障诊断,通过对比不同小波族对离心泵故障诊断的精度,给出了最优小波族。Azadeh等[17]提出一种基于人工神经网络和SVM相结合的离心泵故障算法,能够在噪声干扰环境下对离心泵故障进行诊断。
通常情况下,故障诊断技术往往对振动位移、振动速度、振动速度等单一振动信号进行特征提取后进行诊断。虽然仅利用振动信号能够取得较好的诊断效果,但有时不同的故障表现的特征可能相似,仅使用单一振动传感器信号所获得的信息有限,对故障特征分析不全面,故障诊断正确率提升较为困难,易造成误诊和漏诊。
在离心泵工作过程中,通过布置在设备上的传感器可测量得到设备温度、压力、流量、振动等信号。故障发生时,除出现声音异常外,现场检查发现泵壳体温度高,轴承箱振动、温度均较高[18],这表明这些信号在设备运行过程中是一个有机整体,它们不仅在空间(测点位置)上相关,而且在时间上也相关,各参数间的相关性含有大量关于设备健康状况的信息,这些相关性能够反映设备的运行状态和故障类型。
本文提出了一种基于多物理场信号相关分析与支持向量机相结合的故障诊断方法,结果表明该方法能够充分考虑多物理场信号之间的相关性,相对单一测点诊断结果准确率有较大的提高。
1 理论基础
1.1 多物理场信号相关度矩阵
针对单一测点无法充分利用离心泵综合信息的问题,本文提出一种多物理场信号相关度矩阵的特征提取方法。该特征提取方法能够充分利用离心泵在不同故障条件下多物理场信号之间的相关性,提取更深层析的特征,有效克服传统单一物理量故障诊断方法因特征提取不充分而导致的故障诊断正确率提升困难的缺点。下面介绍多物理场相关度矩阵特征提取方法的计算过程。
通过多物理场传感器采集离心泵在正常状态下和故障状态下的多物理场信号,做好标签构成样本数据集。
首先,对样本数据中的每个样本按照下面公式进行归一化处理
(1)

其次,计算样本数据中任意两个归一化后的多传感器信号相关系数,计算公式为
(2)
式中:rj,j′为该样本任意两归一化后第j个传感器信号与第j′个传感器信号的相关系数;n为该样本的数据点个数,当j=j′时,rj,j′=1。
最后,将计算得到的每个任意两个传感器信号相关系数组成J×J的相关度信号矩阵R(J为多物理场传感器信号的数量),矩阵元素的存储规则以某一传感器信号为基础,将其与其他传感器信号的相关系数组成一行或一列,形成的相关度信息矩阵为
(3)
式中:矩阵中的元素rj,j′是第j个传感器信号与第j′个传感器信号的相关系数,共有J个传感器信号;R为所构成的任意两个多传感器信号的相关度矩阵。
可见,多物理场信号相关度矩阵中涵盖各个物理场信号之间相关性,能够发现离心泵不同状态下的各物理场之间的潜在关系,提取的特征信息丰富。
1.2 支持向量机
支持向量机是一种基于统计学理论的机器学习方法,现被广泛应用于故障诊断、决策分类等领域。SVM以结构风险最小化为准则,其核心思想是在高维空间中寻找一个超平面,该超平面能够时各个类别之间的间隔尽可能最大化[19]。
该超平面的表达式为
w·φ(xi)+b=0
(4)
式中:φ为目标函数;w为权重;b为权重。
SVM在高维空间中寻找超平面问题最终可以转化为求解如下的优化问题,表达式为
(5)
式中:C为惩罚系数;ζi为松弛因子。
通过不断优化求解,最终得到的样本最优分类决策函数为[20]
(6)

将已知故障类别的多物理场相关度矩阵作为故障特征输入SVM中,优化SVM中的参数,获得最优分离超平面,得到基于多物理场相关分析的故障诊断模型,将未知故障类别的多传感器信号转化为多物理场相关度矩阵后出入故障诊断模型中,即可智能诊断出故障类别。
2 故障诊断流程
本文提出的基于多物理场相关分析与SVM相结合的故障诊断流程,如图1所示。

图1 故障诊断流程图
具体诊断步骤为:
步骤1利用不同类型的传感器采集离心泵在不同状态下的多物理场信号,分为训练集和测试集,其中训练集中含有故障类别标签。
步骤2对每个样本的多物理场信号分别进行归一化处理。
步骤3其次,计算每个样本的任意两个归一化后的多传感器信号之间的相关系数。
步骤4将得到的任意两个传感器信号之间的相关度组成多物理场相关度矩阵。
步骤5构建SVM模型,使用已知故障类型的训练集多物理场相关度矩阵对SVM参数进行训练,获得故障诊断模型。
步骤6将未知故障类别的数据输入上述故障诊断模型中,自动判别故障类型。
3 离心泵故障诊断试验验证
3.1 离心泵故障模拟与多物理场信号采集
为验证本文提出方法的有效性,使用故障试验数据进行验证。试验装置为25ZX3.2-32型离心泵故障模拟实验台,如图2所示其中包括电机、离心泵(预制多种故障)、加热器、冷凝器以及多物理场传感器等。试验时,驱动电机与泵分别固定在两个不同的基架上,驱动电机轴与泵轴之间采用的是柔性联轴器相连。图2中同时给出了传感器的布置。

图2 离心泵故障模拟实验台
模仿“凯斯西储大学轴承数据中心”、“机械故障预防技术学会”提供的公开数据集中制造故障的方法,分别制造叶轮缺损、轴承内圈磨损、轴承外圈磨损等3种故障,外加正常情况共4种状态。叶轮缺损故障的缺损位置在叶轮边缘,如图3(a)所示,制造5 mm×20 mm的缺口作为叶轮磨损故障;轴承内圈磨损故障表现为在轴承内圈制造宽度约为2 mm的贯穿故障区域,如图3(b)所示;轴承外圈磨损故障表现为在轴承外圈制造宽度约为2 mm的贯穿故障区域,如图3(c)所示。

图3 不同故障状态图片
离心泵转速为2 900 r/min,采样频率为10 kHz,分别采集4种状态下(3种故障状态和健康状态)离心泵的联轴节振动速度信号、轴承振动速度信号、泵体振动速度信号、出口流量信号、出口压力信号及油液温度信号等6种多物理场信号,传感器参数如表1所示。
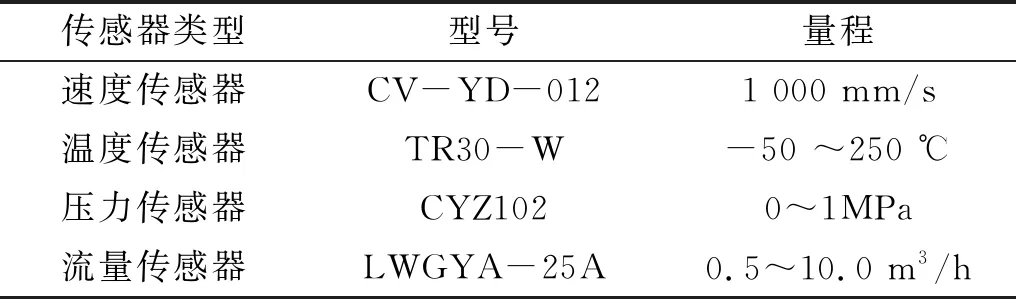
表1 传感器参数表
每类状态含有50个训练样本和50个测试样本,合计200个训练样本和200个测试样本,每个样本包含512个数据点,数据集构成如表2所示。4种状态下不同物理场传感器时域波形图如图4所示,由左到右、由上到下依次为离心泵的联轴节振动速度信号、离心泵的轴承振动速度信号、泵体振动速度信号、离心泵的出口流量信号、离心泵的出口压力信号以及离心泵的油液温度信号。由图4可见,4种状态下的各物理场传感器信号时域波形相似,很难通过时域波形来判断其故障类型。

图4 不同故障状态时各物理量之间的时域波形图
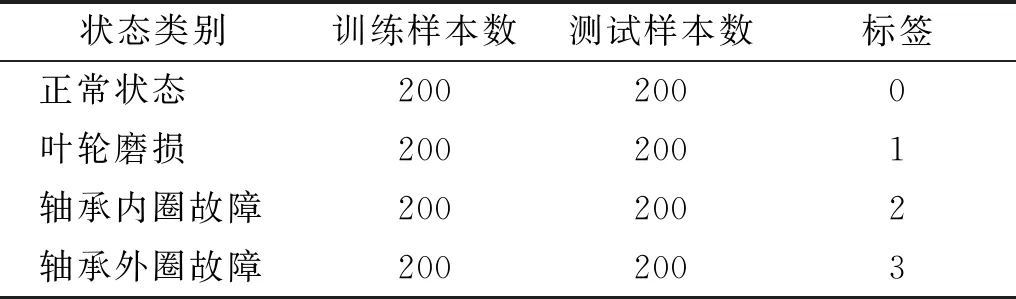
表2 离心泵故障数据集
3.2 故障诊断实施细节
根据所提出的多物理场信号相关度矩阵的计算方法,形成不同状态下离心泵多物理场相关度矩阵,作为不同状态下的故障特征。4种状态下多物理场信号相关度矩阵如图5所示,其中横纵坐标的标号1~6分别表示离心泵的联轴节振动速度信号、轴承振动速度信号、泵体振动速度信号、出口流量信号、出口压力信号以及油液温度信号。图5中可以清晰的看出不同状态下不同测点信号的相关性信息,图中可以清晰的看出不同状态下不同测点信号的相关性信息,颜色越深表示两个信号之间正相关性越强,颜色越浅表示两个信号的负相关性越强。比如叶正常状态下,联轴节振动速度信号、轴承振动速度信号、泵体振动速度信号三者之间存在正相关性关系,与出口压力信号以及油液温度信号均呈现一定的负相关性,但与出口流量信号几乎没有相关性。可以看出,不同状态下的多物理场信号相关度矩阵图区分较为明显,表明提取的特征较为充分。

图5 不同状态下多物理场信号相关度矩阵
基于多物理场相关分析与支持向量机的离心泵故障诊断方法中SVM算法利用LIBSVM工具箱[21]来实现,同时设定惩罚系数C=1,核函数为径向基函数(radial basis function),其表达式为
(7)
为验证本文提出方法的有效性,本文使用单一传感器信号结合SVM的故障诊断方法进行对比,分析不同方法的诊断准确度。对比方法提取单一信号的时域统计量作为故障特征结合SVM进行诊断,所使用的SVM参数与本文提出方法一致,提取信号的时域统计量为均方根、振幅均方根、峭度、偏度、峰峰值、峰值因子、脉冲因子、裕度因子、形状因子、峭度因子[22]。
3.3 故障诊断结果
表3所示为本文所提出的方法与对比方法的诊断结果,其中Sensor1~Sensor6分别对应离心泵的联轴节振动速度信号、轴承振动速度信号、泵体振动速度信号、出口流量信号、出口压力信号以及油液温度信号。由结果可以看出,仅使用单一物理场传感器的诊断结果较差,离心泵的联轴节振动速度信号、轴承振动速度信号和泵体振动速度信号的诊断结果分别为63.5%、73.0%和90.5%,使用出口流量信号、出口压力信号以及油液温度信号的诊断结果为65.5%、78.5%、82.0%,使用单一传感器信号的故障诊断正确率最高为90.5%。相比使用本文提出的算法的故障诊断正确率达到98.5%,比使用单一物理场信号的诊断结果提高了9.4%,结果提升较为明显。

表3 诊断结果
图6所示为不同方法诊断结果的混淆矩阵图,由图可以看出,使用单一信号进行故障诊断结果较差,但是某一个信号对于某一类故障诊断效果较好。由图6(a)可以看出,使用联轴节振动速度信号进行诊断对于轴承外圈磨损故障诊断效果较好,而对于其他故障诊断效果较差;轴承振动速度信号(见图6(b))对于四类故障诊断效果均不佳;泵体振动速度信号(见图6(c))对于除了轴承内圈的故障,其他故障诊断效果较好;出口流量信号(见图6(d))对于叶轮磨损和轴承内圈故障诊断效果最佳,为别为100%和98.0%;出口压力信号(见图6(e))以及油液温度信号(图6(f))对于正常状态的诊断结果为100%,而对于其他故障类型诊断效果欠佳。而使用本文提出的方法对于四类故障诊断效果均占优,如图6(g)所示。

图6 诊断结果混淆矩阵
由以上分析可知,在本案例情况下,单一物理场信号可能对于个别故障区分较好,能够有效提取这些故障的特征,而对于其他故障诊断效果差,特征提取不明显。综合利用这些多物理场信息并考虑他们之间的相关性,能够将各个物理传感器信号提取到了故障特征进行有效的整合,从而提高故障诊断准确率。
3.4 可视化分析
为了直观的说明本文提出方法的对于离心泵故障特征提取的有效性,使用t-SNE算法[23]对每个单一物理场信号时域特征以及所提出的多物理场相关信息矩阵特征进行降维可视化,结果如图7所示。由此可见,在本案例情况下,总体来看,单一物理场信号提取的特征效果不好,不能明显画出分类边界。相比其他单物理场信号,泵体振动速度信号(见图7(c))能够稍微将4种故障区分开来,但是分类边界不明显;出口压力信号(见图7(e))以及油液温度信号(见图7(f))能够明显将正常状态、叶轮磨损故障分离出来,但轴承内圈故障和轴承外圈混在一起,无法画出明显的分类边界。而本文提出的多物理场相关信息矩阵方法能够明显地区分4种故障,考虑故障发生时各个物理场之间的相关性,特征提取更加充分,如图7(g)所示。

图7 基于t-SNE的特征可视化
4 结 论
本文针对离心泵故障诊断仅使用单一振动信号而存在的故障特征不全面、故障诊断正确率提升困难等问题,提出了一种基于多物理场相关分析与支持向量机相结合故障诊断方法,并且利用离心泵故障数据对所提出的方法进行了验证。结果表明:本文所提出的方法能有效提取到不同故障模式下的多物理场之间的相关性特征,在离心泵故障诊断中准确率为99.0%,相比仅使用单一振动速度信号的SVM方法,故障诊断正确率提高了9.4%。
