结合测速测距的卫星定位法研究
2022-03-26刘天琦
刘天琦,张 浩,焦 名
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
青藏铁路线路较长,且沿线自然环境恶劣、大量布置轨道电路和应答器的建设成本和设备维护成本较高[1],采用基于卫星定位导航的列车实时定位技术具有明显优势,该技术可以减少区间实体地面设备的部署数量[2],同时可以提高列车实时定位的精度,因此卫星定位技术的引入对青藏铁路列车运行控制系统中列车安全定位具有重要意义。本文重点介绍在列车经过道岔的情况下由于道岔定反位状态的变化可能导致的卫星定位结果定错轨道问题,据此提出了与车载测速测距模块结合的列车连续定位方案,能够较好解决列车过道岔时的定位问题。
2 线路电子地图
线路电子地图是青藏铁路中车载设备用于卫星定位和运行的基础数据[3],主要包括轨道地理信息数据和固定应用数据两种文件,其中轨道地理信息数据涵盖了卫星定位经纬度数据与轨道位置数据间的对应关系,固定应用数据包含区间和站内的应答器(包含实体应答器和虚拟应答器)、车站内道岔、管辖边界信息。固定应用数据是车载设备在区间和站内判断所处轨道,以及触发虚拟应答器报文的依据。同时,应答器中的数据是车载设备运行所需的基础数据。
线路电子地图覆盖本临时限速服务器(Temporary Speed Restriction Server,TSRS)管辖范围,并向相邻TSRS延伸一个车站的范围车站进行划分,每个TSRS管辖范围内的轨道地理信息和固定应用数据按车站管辖范围进行划分。每个车站对应唯一的轨道地理信息和固定应用数据文件。
电子地图的轨道地理信息数据存储的线路卫星定位点可以将偏移在轨道附近的定位点校正至轨道上,从而降低卫星定位信息的误差,提升列车定位精度。电子地图包含3种文件。
线路电子地图索引文件:包含TSRS管辖的每个车站的信息及前后车站的链接关系。每个车站的最大、最小经纬度信息用于定位列车当前所在车站。
轨道地理信息文件:主要描述车站管辖范围索引轨道线路的卫星定位经纬度信息、轨道位置等。将轨道划分为多个轨道片,每个轨道片用2个经纬度点描述,并表明当前轨道片特性(30 m内唯一轨道),如图1所示。
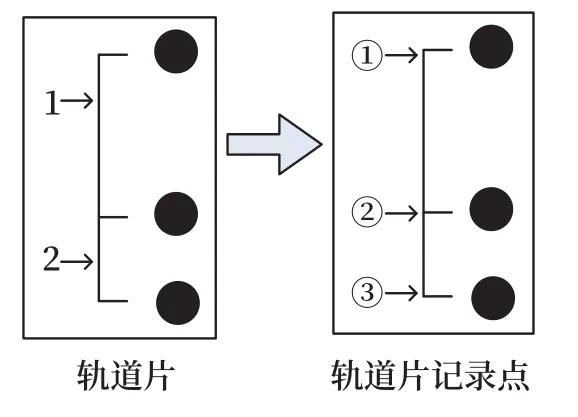
图1 电子地图轨道及轨道片示意Fig.1 Track and track pieces of E-map
固定应用数据文件:主要描述区间和站内的道岔、应答器和管辖边界在轨道上的位置以及连接关系,如图2、3所示。

图2 电子地图轨道及固定应用设备示意Fig.2 Track and fixed devices of E-map

图3 电子地图固定应用设备连接示意Fig.3 Linked fixed devices of E-map
3 卫星定位方案
青藏铁路列车在行驶过程中,会经过大量狭长隧道场景[4]。在完全或者部分遮挡情况下,可能出现可见卫星数目不足或卫星结构分布不良的情况[5],导致卫星接收机计算出的定位数据存在较大误差,对列车连续定位产生不良影响,因此针对卫星数据的处理十分重要。本章介绍卫星数据的处理过程及定位方案。
3.1 卫星数据预处理
对卫星定位数据进行预处理操作的目的在于滤除部分定位误差较大的卫星定位数据。本方案将卫星定位数据分为3种状态,分别为稳定状态、过渡状态(非稳定状态到稳定状态之间的状态)以及非稳定状态。卫星定位数据状态转换过程如图4所示,其中稳定状态只能由过渡状态单向转换得到并且只能单向转换至非稳定状态,非稳定状态与过渡状态之间可以双向转换。
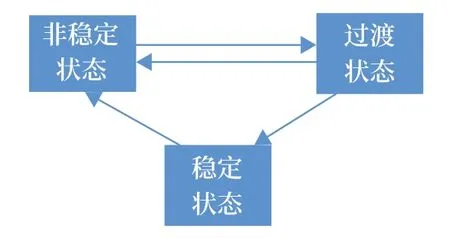
图4 卫星定位状态转换Fig.4 State transition of satellite positioning
卫星定位数据预处理过程如下。
1)判断当周期卫星定位数据的有效性。定位数据的有效性判定包含其经纬度定位误差、可见卫星数目、dop值等,当卫星数据满足所有判定条件时才判定当周期的卫星定位数据有效。
2)结合当周期卫星定位数据的有效性及当前卫星定位状态,进行状态转换。
a.从非稳定状态到过渡状态转换条件:当周期卫星数据有效;
b.从过渡状态到稳定状态转换条件:连续5周期(可配置)卫星数据有效;
c.从过渡状态到非稳定状态转换条件:当周期卫星数据无效;
d.从稳定状态到非稳定状态判定条件:连续10周期(可配置)卫星数据无效。
3)当卫星定位状态处于稳定状态时认为卫星定位数据可以用于对列车进行定位。
卫星定位状态转换过程中的阈值设定应充分考虑卫星定位准确性和可用性,做到在保证至少90%可用性的前提下尽可能精确定位。
3.2 列车连续定位
利用卫星数据进行列车连续定位时,采取垂线匹配算法将有效的卫星定位点定位至电子地图描述的轨道上[6]。具体方法为从卫星定位点向电子地图轨道片作垂线,找到当前轨道上垂线最小的轨道片,卫星定位点在该轨道片上的垂足所在位置即为列车定位结果。
在列车完成初始定位后,系统进入列车连续定位阶段。在连续定位过程中需要保证相邻两周期的列车定位结果不大于在列车周期间隔下的最大行驶距离。垂线匹配算法能够将定位点收敛至电子地图轨道区段上,最大行驶距离限制能进一步滤除卫星定位的错误,从而提升卫星连续定位的可用性以及定位精度[7]。
列车确认其所在轨道和运行方向后,以最近的相关应答器组(Last Relevant Balise Group,LRBG)作为参考点,按照其轨道位置及运行方向计算列车的相对走行距离,并考虑安全误差给出车头位置的置信区间。下一周期的连续列车定位则以前一周期的定位结果作为参考点。
3.3 卫星定位定错轨道情况
若单纯依靠卫星数据来进行列车定位,则在列车经过道岔的场景下,可能出现卫星定位定错列车所在轨道的情况[8]。
如图5所示,若列车实际已经运行到道岔的定位轨道上,但卫星定位连续定在已经过道岔的后方(即岔前位置),同时,在列车经过道岔后,道岔状态由定位转换至反位,在此种情况下,列车连续定位的结果为道岔反位所在轨道,即发生定错轨道问题。
在上述情况下,若列车经过一个道岔后触发实体应答器或LRBG,则卫星定位结果可以被纠正到正确的轨道上,如图5所示。
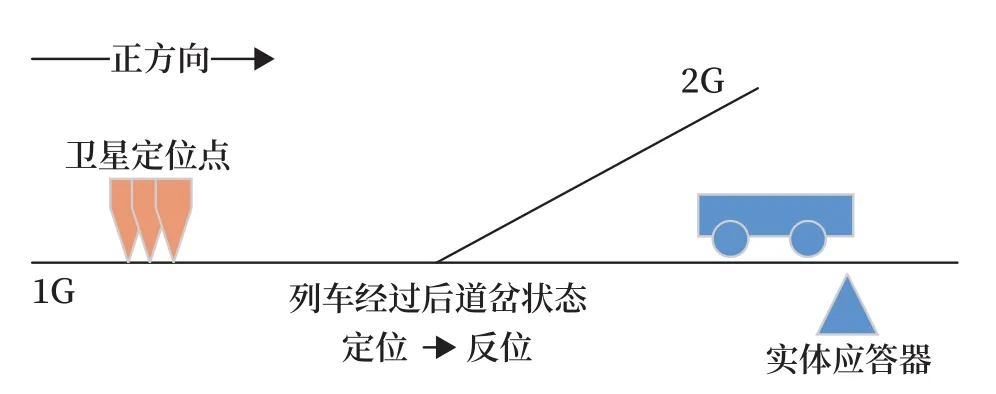
图5 列车过单个道岔示意Fig.5 A train passing one single switch
若列车经过2个或以上道岔后才触发实体应答器或LRBG,则存在卫星定位无法检测情况,根据定位结果无法判断列车经过2个道岔的正确路径,如图6所示。

图6 列车过多个道岔示意Fig.6 A train passing more switches
3.4 已过道岔判定
针对列车经过道岔时若道岔状态改变可能出现列车定位定错轨道的情况,本文给出以下解决方案。
添加已过道岔:基于参考LRBG,根据车载测速测距距离信息,向列车行驶正方向进行搜索。若定出的列车位置已经越过道岔,则将锁定该道岔的定反位状态并将该道岔设置为已过道岔。
删除已过道岔:当列车触发下一个参考LRBG时,认为列车定位在正确的轨道上并且已经找到正确的行驶路径,将之前保存的已过道岔清空。
在利用卫星数据进行连续列车定位的过程中,根据参考LRBG和车载测速测距信息将道岔划分为已过道岔和未过道岔两类。
若当前道岔前后两周期存在变化,根据上一周期的参考LRBG、测速测距模块可以判断列车已经越过该道岔,推算出列车所在轨道与卫星定位结果一致,则说明列车定位在正确的轨道;若判断上周期列车未越过该道岔,且结合本周期的道岔定反位状态推算的列车所在轨道与卫星定位结果不一致,则说明列车定位失效,需恢复初始定位状态,根据当前LRBG正方向重新进行卫星定位。若前后两周期当前道岔定反位状态不存在变化,则继续进行连续定位即可。
当列车经过实体应答器,可以对卫星定位状态结果进行校验,并校正测速测距模块的累计误差,进一步提高列车定位准确性。
4 总结
本文介绍了一种结合测速测距的卫星定位方法,主要解决了列车在过道岔场景中卫星定位定错轨道的问题。该方法结合了车轮速度传感器的短距离内定位准确特性,用于判定列车是否过道岔,确认道岔状态,解决了卫星定位在道岔处的定位不准确问题。该算法相对通过机器学习等算法判定卫星定位而言,简单易懂,具有较高的可实施性。
卫星定位系统的应用极大减少青藏铁路上地面设备的部署数量,显著降低设备成本及运营维护成本,且可以提供实时的、准确的列车定位信息,对于提升系统的运行效率、安全性和可靠性有重要意义。
