基于参考应答器的列车位置和方向计算原理
2022-03-26张友兵王建敏于晓娜张振兴王怀江
张友兵,王建敏,于晓娜,张振兴,王怀江
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
在CTCS-3级列控系统和ETCS-2级列控系统中,车载设备基于参考应答器向无线闭塞中心(Radio Block Center,RBC)报告列车位置。RBC根据所控列车的状态、控制范围内的列车位置、联锁进路信息、临时限速命令等信息,实时生成列车行车许可命令,并通过无线通信系统传输给车载设备。车载设备根据收到的行车许可等信息监控列车位置和速度,保障行车安全。因此,车载设备计算出准确的列车位置和方向是车载设备和地面设备共同监控列车运行、保障行车安全的关键基础之一。
本文系统介绍了车载设备依据参考应答器确定列车位置和方向的方法。
1 相关方向的基本概念
1.1 应答器组方向
当列车经过一组应答器时,列车上的应答器读取器通过瞬间电磁感应依次激活地面应答器,获取相应报文数据。应答器组最少包含1个应答器,最多包含8个应答器。应答器组又分为链接的应答器组和未链接的应答器组。对于链接的应答器组,车载设备根据应答器组的链接信息和应答器组的实际位置对列车位置进行校正,并以该组应答器作为最近相关应答器组(Last Relevant Balise Group,LRBG)向RBC发送位置报告。
以包含2个应答器的应答器组为例,从组内1号应答器到2号应答器的方向为应答器组的正向,从组内2号应答器到1号应答器的方向为应答器组的反向,如图1所示。
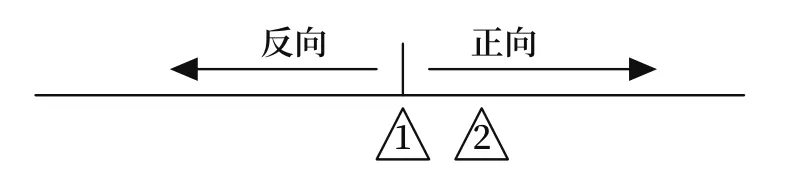
图1 应答器组方向Fig.1 Direction of balise group
1.2 列车方向
目前,高速铁路列车两端一般都配备有列车车头和驾驶室,当列车正常运行时,一端处于激活状态,另一端则处于非激活状态,司机在激活端驾驶列车安全运行。列车方向就是从列车的非激活端到激活端的方向。如图2(a)所示,A端为激活端,B端为非激活端,列车方向为从B端到A端的方向。如图2(b)所示,B端为激活端,A端为非激活端,列车方向为从A端到B端的方向。
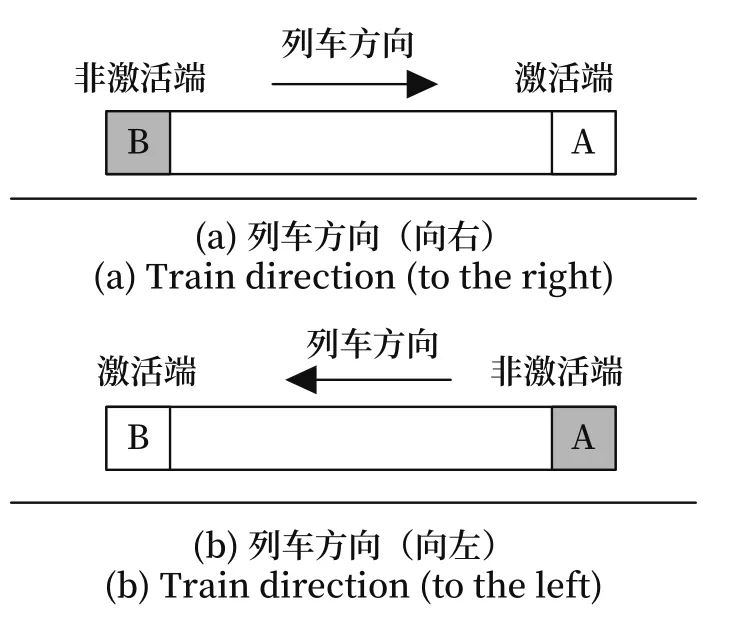
图2 列车方向Fig.2 Train direction
1.3 列车运行方向
司机驾驶台的方向手柄包含前向、中立、后向3个位置。方向手柄向前,列车向前运行;方向手柄向后,列车向后运行。列车运行方向为列车的实际运行方向。如图3(a)所示,A端为激活端,B端为非激活端,列车前行,列车运行方向向右,列车运行方向与列车方向相同。如图3(b)所示,A端为激活端,B端为非激活端,列车退行,列车运行方向向左,列车运行方向与列车方向相反。
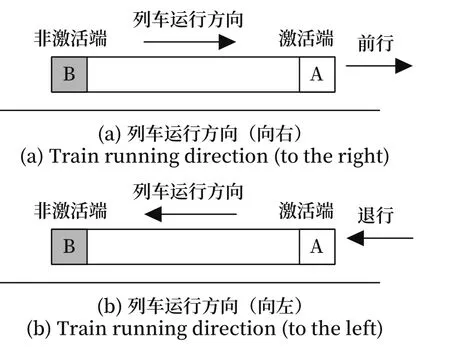
图3 列车运行方向Fig.3 Train running direction
2 位置报告中的位置和方向
2.1 位置报告
在CTCS-3级列控系统和ETCS-2级列控系统中,车载设备基于参考应答器向RBC报告列车位置,RBC根据列车位置信息向车载设备发送行车许可。
车载设备应根据位置报告参数的要求向RBC发送位置报告。如果列车停车、模式变化、列车最小安全末端越过RBC边界、列车最大安全前端越过RBC边界、等级变化、建立通信会话、经过应答器等情况发生,车载设备也应向RBC发送位置报告。
CTCS列车控制系统和ETCS列车控制系统均定义了D_LRBG、Q_DIRLRBG、Q_DLRBG、Q_DIRTRAIN共4个变量,如表1所示。通过这4个变量共同确定列车的位置和方向,车载设备计算这4个变量的取值并传递给地面设备,实现车地之间关于列车位置和方向的信息共享。一种最为常见的应答器组方向、列车方向、列车运行方向和列车前端距LRBG的绝对距离共同确定基于LRBG的列车位置和方向的例子如图4所示。
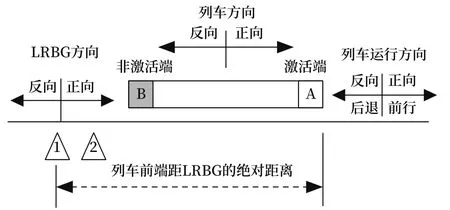
图4 基于LRBG的列车位置和方向Fig.4 Train position and direction based on LRBG
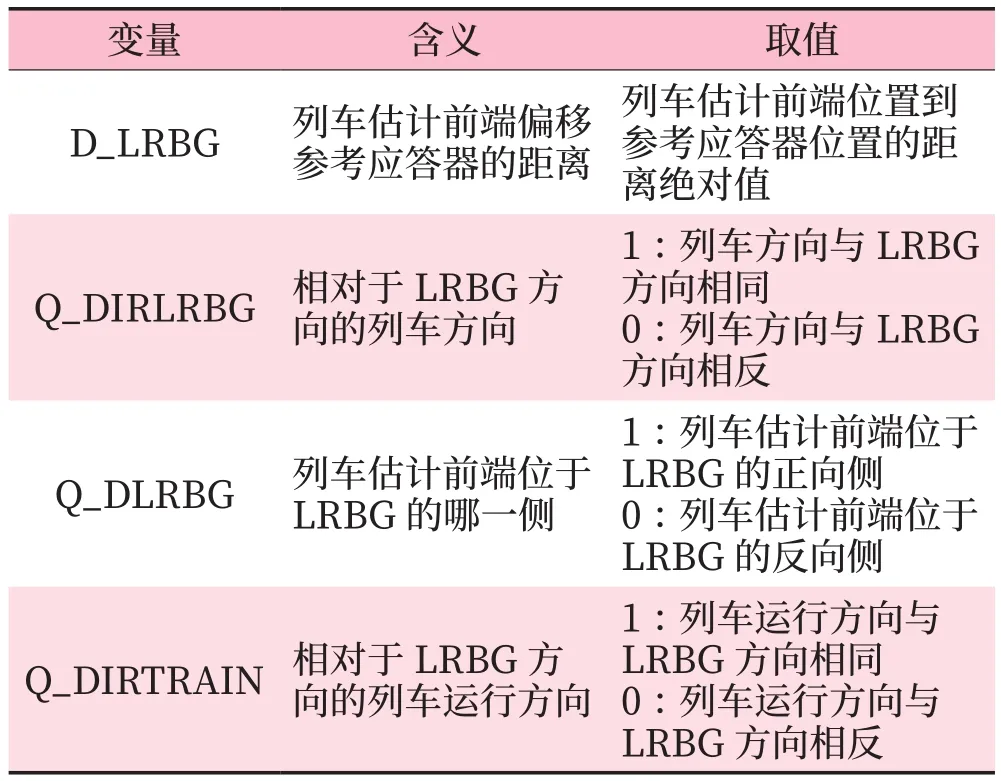
表1 位置报告中描述列车位置和方向的变量Tab.1 Variables of train position and direction described in position report
2.2 Q_DIRLRBG取值
如图5(a)所示,列车A端为激活端,B端为非激活端,列车方向为从非激活端(B端)到激活端(A端)的方向。列车方向与LRBG方向相同,因此Q_DIRLRBG为1。
如图5(b)所示,列车B端为激活端,A端为非激活端,列车方向为从非激活端(A端)到激活端(B端)的方向。列车方向与LRBG方向相反,因此Q_DIRLRBG为0。
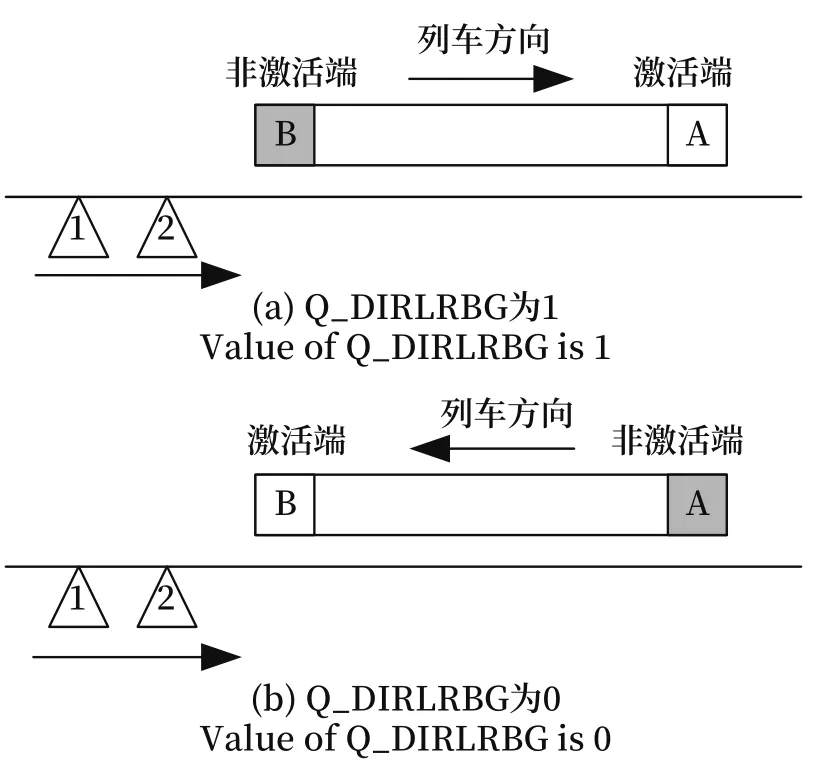
图5 Q_DIRLRBG取值Fig.5 Value of Q_DIRLRBG
2.3 Q_DLRBG取值
如图6所示,列车A端在应答器组的正向侧,对于A端来说,Q_DLRBG为1。列车B端在应答器组的反向侧,对于B端来说,Q_DLRBG为0。
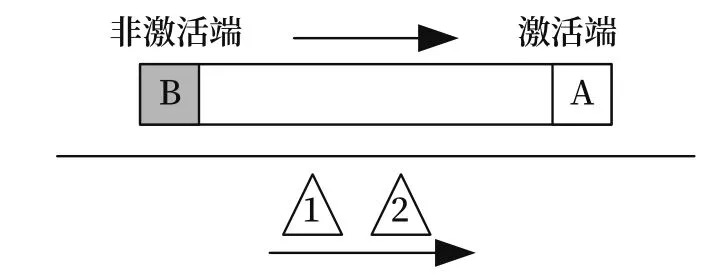
图6 Q_DLRBG取值Fig.6 Value of Q_DLRBG
2.4 Q_DIRTRAIN取值
如图7(a)所示,列车A端为激活端,当方向手柄向前,列车前行。此时,列车运行方向和LRBG方向相同,Q_DIRTRAIN为1。
如图7(b)所示,列车A端为激活端,当方向手柄向后,列车退行。此时,列车运行方向和LRBG方向相反,Q_DIRTRAIN为0。

图7 Q_DIRTRAIN取值Fig.7 Value of Q_DIRTRAIN
3 列车位置和方向的状态转换
3.1 列车位置和方向全场景分析
经过全部场景分析,基于参考应答器的列车位置和方向存在8种场景,如图8所示。再通过研究,发现使用Q_DIRLRBG、 Q_DLRBG和Q_DIRTRAIN可以完整描述这8种场景。Q_DIRLRBG、 Q_DLRBG和Q_DIRTRAIN分别有正、反两个方向,可以排列出8种组合,如表2所示。图8中的场景与表2中的场景是一一对应关系。
从表2和图8可以得到以下规律。
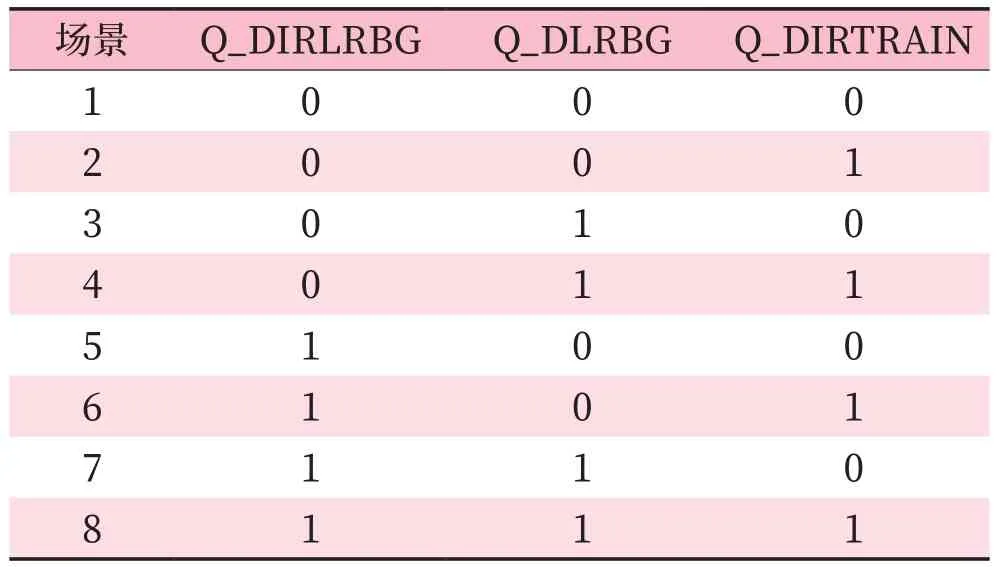
表2 基于LRBG的列车方向Tab.2 Train position and direction based on LRBG
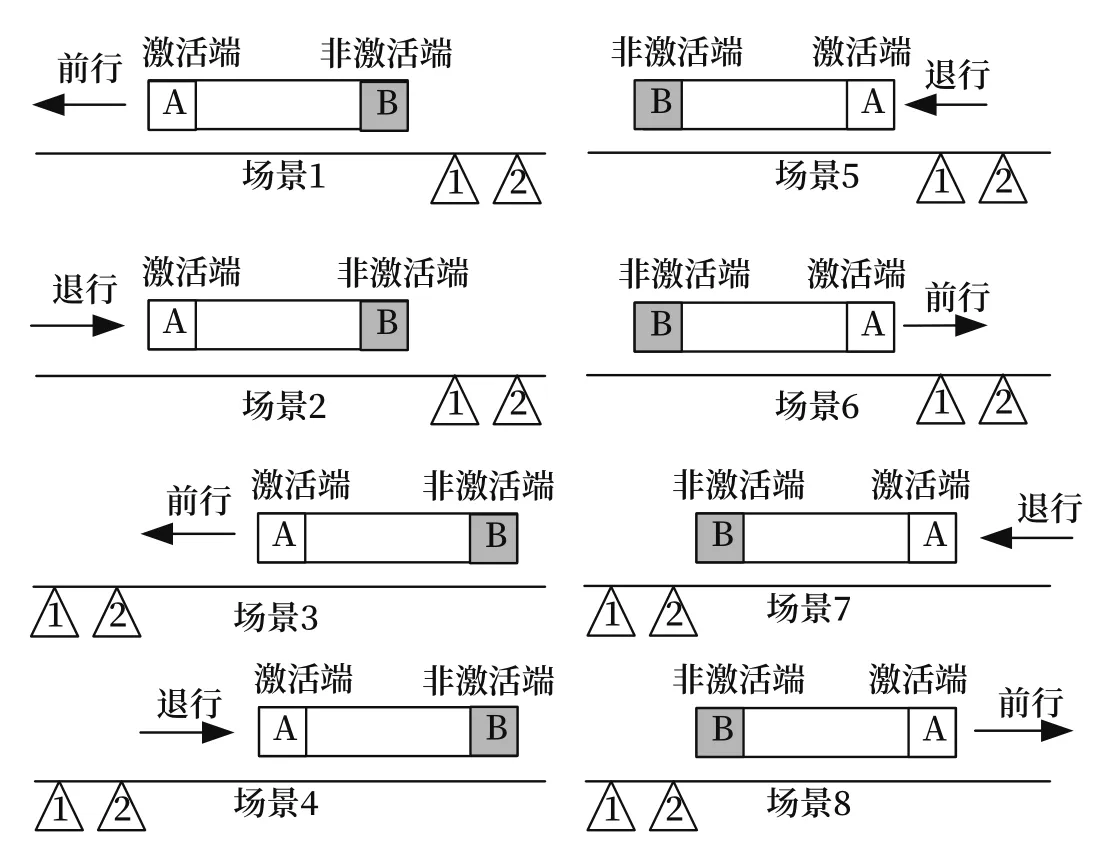
图8 基于LRBG的列车位置和方向的所有场景Fig.8 All scenarios of train position and direction based on LRBG
1)当列车换端(列车的激活端和非激活端发生交换),列车方向发生变化,则Q_DIRLRBG发生变化。其中,场景1和场景5、场景2和场景6、场景3和场景7、场景4与场景8均符合这条规律。例如,在场景1和场景5中,列车均位于应答器组的反方向侧,列车运行方向均为向远离LRBG的方向运行,只是列车的激活端和非激活端发生变化,即列车方向发生变化,导致Q_DIRLRBG发生变化。
2)当越过参考应答器组时,Q_DLRBG发生变化。其中,场景1和场景3、场景2和场景4、场景5和场景7、场景6和场景8均符合这条规律。例如,在场景1和场景3中,列车激活端和非激活端未发生变化(列车方向未变),列车运行方向均为向左运行。场景1中的列车位于LRBG反向侧,场景3中的列车位于LRBG正向侧,即场景3中的列车越过LRBG就变成了场景1,导致Q_DLRBG发生变化。
3)当列车在前行和退行之间切换时,Q_DIRTRAIN发生变化。其中,场景1和场景2、场景3和场景4、场景5和场景6、场景7和场景8均符合这条规律。例如,在场景1和场景2中,列车均位于LRBG的反向侧,列车激活端和非激活端未发生变化(列车方向未变)。但是,站在激活端的角度,场景1的列车向前运行,场景2的列车向后运行,列车运行方向发生变化,导致Q_DIRTRAIN发生变化。
3.2 列车位置和方向的状态转换
如图9所示,给出了不同场景的状态转换,每一种状态与其他3种状态相连,表示从这种状态可以转换到其他3种状态,线条旁边的文字是状态转换的条件。在表3中,以状态7为初始状态,说明通过一步转换、两步转换和三步转换,分别可以进入哪些状态,并得到如下规律。
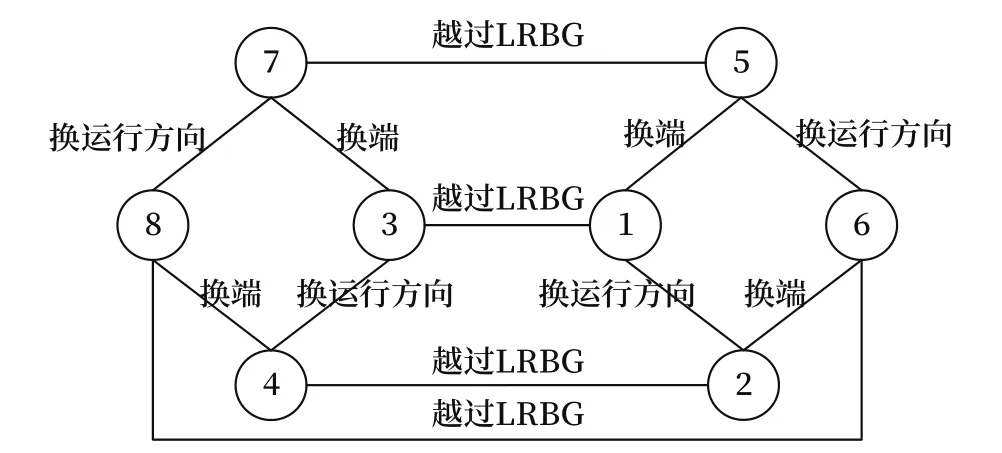
图9 不同场景的状态转换Fig.9 State transition of different scenarios
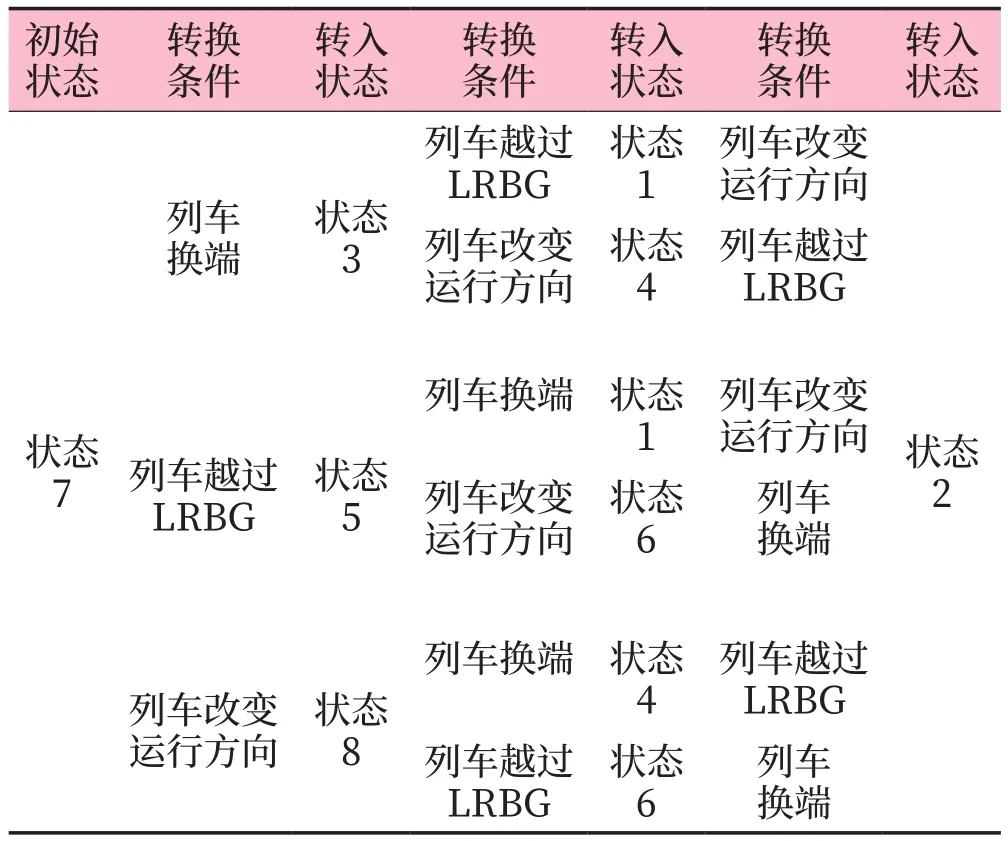
表3 初始状态为7的状态转换Tab.3 State transition with initial state 7
1)从每一个状态出发,通过一步状态转换,可以进入另外3种状态。例如,从状态7出发,通过一步状态转换,可以进入状态3、状态5和状态8;
2)从每一个状态出发,通过两步状态转换,可以进入另外3种状态。例如,从状态7出发,通过两步状态转换,可以进入状态1、状态4和状态6;
3)从每一个状态出发,通过三步状态转换,可以进入另外一种状态。例如,从状态7出发,通过三步状态转换,只能进入状态2;
4)不同状态之间最多通过换端、越过LRBG、改变运行方向共三步即可实现状态互相转换。
4 列车位置和方向的计算方法
如果一辆列车安装两套车载设备,列车两端分别安装一套车载设备,两套车载设备分别控制列车的两端。激活端的车载设备处于正常工作状态,非激活端的车载设备处于休眠状态。下面分别研究激活端和休眠端车载设备如何计算基于LRBG的列车位置和方向。
4.1 激活端
如果激活端的方向手柄向前,列车向前移动,列车位置绝对值增大,激活端车载设备判定列车实际运行方向为正向。如果激活端的方向手柄向后,列车向后移动,列车位置绝对值减小,激活端车载设备判定列车实际运行方向为反向,如表4所示。

表4 激活端列车运行方向Tab.4 Train running direction of activation end
站在激活端车载设备的角度分析,在各个场景下,分别以列车方向为正向建立坐标系,可以得到每个场景下的LRBG方向和列车运行方向,如表5所示。根据表5可以得到表2所示结果。
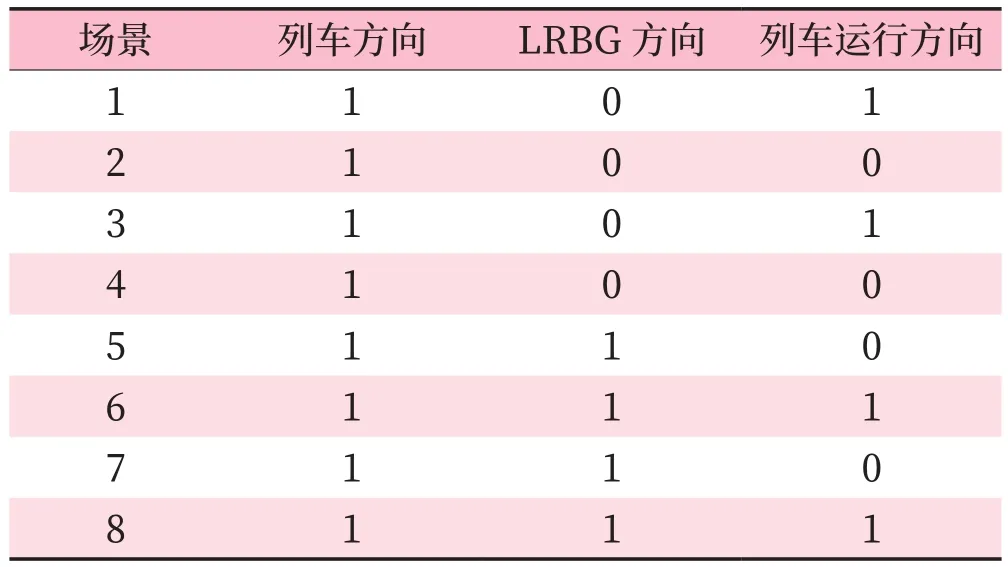
表5 激活端方向判定Tab.5 Direction determination of activation end
4.2 休眠端
当激活端前行,休眠端后退,休眠端列车位置绝对值减小,则列车运行方向为正向;当激活端后退,休眠端前行,休眠端列车位置绝对值增大,则列车运行方向为反向。也就是说,基于列车位置绝对值的变化方向判断列车运行方向时,激活端和休眠端的逻辑正好相反,如表6所示。

表6 休眠端列车运行方向Tab.6 Train running direction of sleeping end
可见,激活端和休眠端判断的列车运行方向相同,判断LRBG方向相同,也可以得到表5的结果。
4.3 通用的计算方法
以图8场景8为例,说明激活端(A端)和非激活端(B端)基于参考应答器的列车位置和方向存在的规律。在场景8中,B端为非激活端,A端为激活端,B端车载设备处于休眠模式,A端车载设备处于非休眠模式。对于A端和B端,LRBG方向相同(基于相同的LRBG),列车方向一致(从未激活的B端指向激活的A端),A端和B端均位于LRBG的正向侧,所以Q_DIRLRBG、Q_DLRBG和Q_DIRTRAIN均相同。
对激活端和休眠端进行研究,并对表2和表5进行比较分析,可知激活端车载设备和休眠端车载设备计算列车位置和方向的方法相同。
5 总结
本文介绍了车载设备基于参考应答器确定列车位置和方向的原理、概念和方法,这种方法对激活端和非激活端的车载设备均有效,车载设备均能正确计算并向地面设备报告不同状态下的列车位置和方向。基于准确的列车位置和方向,车载设备和地面设备可以共同保障列车安全高效运行。
