无环境阻力的尖端生长型软体机器人研究综述
2022-03-24岳龙旺魏青彪程豪刘景达金洪杨
岳龙旺, 魏青彪, 程豪, 刘景达, 金洪杨
(河南工业大学机电工程学院, 郑州 450001)
近年来,由于软体机器人相对于传统的刚体机器人,有安全的人机交互、柔顺性强、可穿戴性及环境适应性强等优点,人们对于软体机器人的关注和研究越来越多[1]。
软体机器人材质软的特性,使其有较好的柔顺性,但面对某些场景,则需要软体机器人“硬”起来,因此软体机器人的变刚度控制是一个重点;软体机器人发生变形移动时,需要知道机器人的形状以及在空间中的状态,判断其是否碰到障碍物、是否处于安全的环境,针对软体机器人的大范围变形检测也是软体机器人面临的难点;刚体机器人运动时,只能实现平移或者旋转,运动精度较高[2];而对于软体机器人,实现精准运动则较难。综上所述,机器人的变刚度控制、大范围变形检测及精准控制是软体机器人存在的主要问题。
围绕以上问题,现综合相关文献,介绍无环境阻力的尖端生长型软体机器人的相关研究,并对未来的发展方向作出展望。
1 机器人灵感来源与基本原理
为了解决软体机器人普遍存在的三个问题,学者们尝试从自然界生物身上获取灵感,设计出多种仿生机器人[3]。例如,Mao等[4]基于海星运动特性使用形状记忆合金(shape memory alloy, SMA)[5]设计出的Multigiait软体机器人,如图1(a)所示;Calisti等[6]模仿章鱼运动特性研制出的仿生章鱼触手,如图1(b)所示;Katzschmann等[7]借鉴鱼的运动特性设计的流体驱动仿生鱼,如图1(c)所示;Villanueva等[8]仿照水母运动特性设计的Robojelly仿生水母软体机器人,如图1(d)所示;Onal等[9]模拟蛇的运动特性研制的仿蛇形软体机器人,如图1(e)所示;Fan等[10]基于青蛙运动特性设计的仿生青蛙,如图1(f)所示。以上的研究都是基于动物的运动特性进行的,目前针对植物生长的特性进行的研究较少,本文中所讲的尖端生长型软体机器人,其设计灵感来源于植物根茎的尖端生长。
蔓藤从尖端开始生长,可以将身体延伸至百倍,并根据周边环境控制生长方向,所以尖端生长型机器人也被称作蔓藤机器人[11],如图2所示。由于身体的延长是从尖端开始,已延长的身体在机器人前进过程中相对于环境无阻力[12],如图3所示,这是尖端生长型软体机器人独有的优点。
尖端生长机器人基本原理如图4所示,机器人的主体材料被缠绕在基座的卷轴上,通过基座内部的压力泵产生压力,使得机器人工作腔内部压强升高,推动机器人尖端外翻,主干不断伸长,因此这种结构的机器人也被称为外翻机器人。当机器人需要收回时,通过电机带动卷轴反转,同时减小内部压强,实现机器人的反向运动。

图1 仿生软体机器人Fig.1 Bionic soft robot

图2 蔓藤生长示意图[11]Fig.2 Schematic diagram of vine growth[11]

图3 尖端生长机器人运动示意图[12]Fig.3 Schematic diagram of the movement of the tip-growth robot[12]

P为机器人主体内压强图4 尖端生长机器人原理图[12]Fig.4 Schematic diagram oftip-growth robot[12]
2 面向变刚度控制的材料选择
在面对不同的工作场景时,软体机器人可以通过变刚度控制实现不同的动作。如在服务机器人领域,软体机器人与人交互时需要较低的刚度,当执行某些命令时(如打开阀门、抓取东西等)则需要较高的刚度。实现软体机器人的变刚度控制,可以大大提高机器人的工作效率。
目前,变刚度控制主要是基于拮抗作用和基于材料相变实现[13]。基于拮抗作用的变刚度可大致分为三种:机构耦合变刚度[14-15]、颗粒阻塞变刚度[16-17]和层干扰变刚度[18],基于材料相变的变刚度可分为电磁变液[19-20]和低熔点合金[21]。
为了实现尖端生长型软体机器人的变刚度控制,大多数尖端生长型机器人选择柔软、有弹性的材料作为主体,这样可以使机器人具有多个自由度,改变机器人主体腔内压力时可实现变刚度,且运动灵活、易于收缩。Hawkes等[12]使用低密度聚乙烯薄膜作为机器人主体材料,这种材料重量轻、成本低、密封性好、弹性应变小,但是刚度变化范围有限,容易被锋利物体刺破造成漏气,且易产生疲劳,疲劳极限为翻转10~50次,适合一次性或者少次性使用,如图5(a)所示。带涂层的织物有较强的耐久性,且可承受更高的负载压力,为机器人提供更高的极限刚度。Coad等[22]使用带防刮尼龙的热塑性涂层织物作为机器人材料,提高了机器人的耐久性和刚度,但当发生应力集中时,会导致热塑层和织物层分离,产生漏气,如图5(b)所示。Putzu等[11]在机器人主体上使用了编织聚酯织物材料,这是一种低密度的碳聚合物,柔韧性好,但延展性较差,如图5(c)所示。Naclerio等[23]制作了一种低迟滞、可折叠的织物人工肌肉,并将其应用到尖端生长机器人上,可以很好地实现机器人的生长和收回;疲劳试验表明,该材料可翻转10万次,但其变刚度控制调节性能一般,如图5(d)所示。

图5 尖端生长机器人材料Fig.5 Tip-growth robotic materials
Do等[24]基于层干扰变刚度的原理,采用低密度聚乙烯塑料作为机器人主体材料,激光切割而成的聚酯纤维作为阻塞层材料,再将一系列的阻塞层用双面胶固定在机器人主体上。每个阻塞层有两个被动阀,通过电磁铁控制这些阀门的开闭,从而实现机器人的分布式变刚度控制,如图6(a)所示。基于散粒体阻塞完成机构的变刚度控制是目前研究最多的一种方法。Yanagida等[25]在尖端生长型机器人主体材料(双层)中加入散粒体,通过控制主体腔内压力实现伸缩,通过控制材料腔内的压力实现变刚度,如图6(b)所示。

图6 尖端生长型机器人的变刚度控制Fig.6 Variable stiffness control of tip-growing robot
在尖端生长型软体机器人变刚度控制中,应用最多的方法是依靠改变机器人主体腔内的压强,来实现机器人的变刚度控制。这种方法的变刚度范围较小,最大刚度取决于机器人主体材料不被破坏的极限受力。目前对于基于拮抗作用和材料相变的尖端生长型软体机器人变刚度控制研究较少,主要由于对软体机器人实现变刚度控制一直是技术难点,且变刚度结构较为复杂。随着材料科学的发展,不断有新型材料出现,对尖端生长型机器人应用可变刚度的材料,将会是解决软体机器人变刚度控制的有效方法。
3 面向大范围变形检测的转向结构设计
大范围变形检测[26]是软体机器人在移动过程中必须考虑的重要问题,它关系到机器人主体的定位[27]及闭环控制[28]。目前的变形检测方法主要有:基于视觉算法多相机重建机器人形状[29]、超声波检测[30]、布拉格光栅检测[31]等。基于视觉算法的变形检测方法要布置相机,且算法复杂、计算时间长;超声波检测存在信噪比的问题;布拉格光栅价格昂贵,难以在大范围内使用。
针对解决软体机器人大范围变形检测的问题,尖端生长机器人的转向控制主要是用到类似差速的原理,保持机器人控制室内一边静止(停止生长),另一边充气加压产生外翻,实现机器人的二维转向。同理,在三维空间内,同时控制机器人三个控制室内的压强,便可以实现三维空间的转向。基于这种原理的转向结构在进行变形检测时,主要是通过记录软体机器人在移动时的速度、移动方向和转向角度,然后累积计算,求出软体机器人的变形形状及空间状态。
Greer等[32-33]制作了三个串联人工气动肌肉,将其围绕机器人主体外侧轴向排列,通过控制三个串联人工气动肌肉的压强,改变机器人一侧的长度,完成机器人的转向,如图7(a)所示。串联人工气动肌肉由聚乙烯薄壁管和O形圈组成,O形圈以一定间隔套在聚乙烯薄壁管上,通过放气和充气引起径向膨胀,实现气动肌肉的长度变化,如图7(b)所示。这种转向方式在机器人伸长过长时,在机器人的尖端会有较明显的时间延迟,且串联人工气动肌肉在反复加压、减压操作后易产生疲劳。Hawkes等[12]设计了一种机械结构式的转向方案。沿机器人主体控制室轴向固定一系列闩锁,闩锁由3D打印制作而成,机器人共有4种生长状态。当控制室减压,来自主室的压力迫使机器人主体侧面的闩锁处于锁定状态(状态1);同时,机器人尖端的闩锁也处于锁定状态(状态2),此时机器人可以直向生长和收回;当一侧的控制室加压,机器人主体侧面的闩锁由于自身独特的结构仍处于锁定状态(状态3);同时,尖端的闩锁由于受到控制室内的压力被迫打开,褶皱被释放,实现机器人的转向(状态4),如图8(a)所示。Blumenschein等[34-35]将聚四氟乙烯材料做成管状物,当作一个制动器,按照一定间距固定到尖端生长机器人的主体表面,然后将一根线穿过制动器,当线和管子完全放松时,机器人直向生长;当拉近线时,制动器聚拢到一起,从而改变机器人主体的形状,变成螺旋形,如图8(b)所示。由于这种转向方式只能产生螺旋形的旋转,形状单一,容易实现变形检测,但应用场景比较受限。

T为拉力;P为机器人主体内压强;P1为控制室内压强图7 串联人工气动肌肉转向控制Fig.7 Series pneumatic muscle steering control

图8 尖端生长型机器人的几种转向结构Fig.8 Several steering structures of tip-growing robot
Wang等[36]设计了一种可以形状锁定的转向结构。在机器人主体的两侧设置两个控制腔室,腔室内分别布置两个相同结构的尖端生长机器人,通过改变控制腔室内两个机器人的相对长度和压强,使机器人完成转向和变刚度控制,如图8(c)所示。这种转向结构的尖端生长机器人在受限环境下,相比前几种转向结构的机器人,可以达到更大的工作空间。周德开等[37]在机器人主体两侧表面连续均匀分布多个褶皱结构,如图8(d)所示;每一个褶皱结构的内侧设置圆形铁皮,另一侧设置电磁铁,无需转向时,电磁铁通电将铁皮吸合;需要转向时,将尖端处的电磁铁断电,释放主体材料的褶皱部分,由于机器人主体两侧长度不一致而实现转向,如图8(e)所示。
以上转向结构的原理都是机器人主动控制转向的,在某些场景不需要机器人主动改变形状,可以对机器人的形状进行预编程,以减少结构复杂度。Slade等[38]通过加热热塑性材料,在所需形状的模具上拉伸,使材料热定型。Satake等[39]在机器人主体材料上指定位置粘贴胶带,使聚乙烯薄膜产生褶皱,从而实现特定形状的伸长。
上述转向结构的变形检测都是通过计算已记录的速度、移动方向和转向角度来实现,随着机器人的不断伸长,这种方法的累积误差会越来越大,位置精度逐渐降低。Watson等[40]设计了一种基于永磁体的变形检测方法,在尖端生长型机器人尖端安装一个环形磁铁,再将机器人放置于磁传感器阵列中移动,可以有效记录机器人的变形情况。目前对于软体机器人的变形检测研究还比较少,尖端生长型机器人在这方面的研究更少,但变形检测仍是机器人控制中的一个重要问题。
4 面向精准控制的建模
相比传统刚性机器人可以用6个自由度表示,由于软体机器人理论上具有无限多个自由度,这给软体机器人的建模和精准控制带来了很大难度。刚性机器人运动学和动力学建模及系统几何关系描述一般采用D-H(由Danevit、Hartenberg提出)参数法[41],对于软体机器人,常用的是在D-H参数法基础上提出的分段常曲率理论模型[42-43]。此外,软体机器人的运动类似于超冗余度机器人[44],也可以使用超冗余度建模方法[45-46]近似研究软体机器人。
为了解决软体机器人的精准控制问题,对尖端生长型机器人进行建模研究,Blumenschein等[47]基于尖端生长型机器人低惯性的特性,建立了静态力平衡模型。该模型将力分为驱动力和损失力:驱动力指施加在机器人尖端外翻横截面的压力,损失力指机器人从基座生长到尖端损失的力和尖端外翻过程中损失的力。Naclerio等[48]考虑到机器人受外力作用,驱动力无法全部作用到介质中,引出了比例系数和抵抗力。Haggerty等[49]在Blumenschein等[47]的基础上,针对机器人与环境交互的过程,分别对无约束环境和有约束环境建模,提出了一种自屈服的模型。Godaba等[50]利用Timoshenko梁理论考虑了旋转和剪切效应,研究了尖端生长型机器人的各种失效方式,以及在轴向和横向载荷下的有效载荷和极限载荷。Del等[51-52]通过在机器人尖端布置一个类似3D打印机的装置,通过控制打印装置在尖端区域增加材料进行导航;并计算出一系列用齐次坐标表示的旋转-平移矩阵来模拟机器人的生长,建立了尖端生长机器人的动力学模型。
对于刚体机器人,与环境接触通常是较危险的;但对于软体机器人,由于其低惯性和较高的柔顺性,与环境接触是相对安全的,且有助于机器人实现更精准的控制。利用这个优点,Greer等[53]建立了一个机器人—障碍交互模型,并开发了一种考虑障碍物碰撞的生长机器人路径确定算法。之后,Greer等[54]又将机器人通过与障碍物接触来实现高鲁棒性导航,提出了一种集总参数的运动学模型。该模型将机器人主体标记成一系列枢轴点,每当机器人转向或者接触到障碍物时,增加一个枢轴点,通过记录枢轴点位置及转弯角度,建立机器人的微分运动学模型,如图9所示。在机器人伸长过程中,如果与障碍物正面接触,尖端生长型机器人可能会出现卡死情况。针对此问题,Ozkan-Aydin等[55]证明了机器人尖端的小幅振荡可以改善机器人的穿越障碍物的能力,使其能够在没有任何反馈控制的情况下穿越所搭建的异构环境。Selvaggio等[56]有效地利用障碍交互来扩大机器人尖端可达工作空间的集合,并设计了一种新的基于障碍物交互的路径规划算法,该算法以最小的姿态误差找到使机器人到达期望位置的障碍物序列。El-Hussieny等[57]基于欧拉-拉格朗日方程,建立了尖端生长机器人的高效动力学模型,并设计了基于重力补偿模型的PD闭环控制器,无需实体机器人便可以使用MATLAB软件进行仿真验证。

O1、O2为障碍物点;C1、C2、C3、C4为枢纽点;t1~t4为时间序列图9 集总参数运动学建模[54]Fig.9 Lumped parameter kinematic modeling[54]
以上的建模方法针对不同结构的尖端生长型机器人,建立对应的模型,有效提高了机器人的控制精度。由于软体机器人的运动具有非线性的特点,针对不同结构、不同环境下的尖端生长型机器人,建模方法往往大不相同,如何针对特定结构的末端生长型机器人建立数学模型,以实现精准的运动控制仍是以后的研究重点。
5 应用场景
5.1 救灾探险
尖端生长型软体机器人独有的无环境阻力及可大幅生长的特性,十分适合在救灾探险领域应用。在废墟中救灾,尖端生长型软体机器人内部的天然通道,可以用来给幸存者传送水和食物;在机器人末端安装摄像头,可以有效获取幸存者的声音和个体图像,判断幸存者当前的身体状态,从而正确施展相应援救措施,极大地提高幸存者生还率。当机器人被重物压到时,尖端生长型软体机器人若能实时改变刚度,并实现实时的变形检测,则能有效降低机器人受损的概率和强度。
Tsukagoshi等[58]设计一款名叫Grow-hose-Ⅰ的救灾机器人,该款机器人使用两根软皮管作为生长主体,并在机器人末端安装摄像机和带传感装置的头部单元,沿着主体设置柔性导轨,用以固定头部单元,如图10(a)所示。实验证明,机器人可以在弯曲狭窄的通道内顺利通过,如图10(b)所示。针对机器人内部电线的滑动速度是机器人生长速度两倍造成电线累积的问题,如图10(c)所示,Mishima等[59]设计了一种新型的头部单元和搜救机器人DETube。在机器人的头部单元增加电机和卷轴,使机器人在生长过程中,将多余的电线缠绕在卷轴上,如图10(d)所示。Coad等[22,60]设计了一种新的电线储存方式,摄像头的电线不是在机器人内部通道内滑动,而是在机器人主体外表面滑动,随着机器人生长,不断变长的电线会被拉链锁住,从而避免电线的缠绕问题,并在机器人比赛和考古遗址探索中应用,如图11所示。Luong等[61]将尖端生长机器人应用到海底珊瑚礁的探索中,依靠尖端生长机器人的柔顺性可以实现无损地穿越自然缝隙;在机器人尖端增加磁性吸附机构,再将摄像头安装在磁吸附结构上,实现海下的图像反馈,如图12所示。

P为压强;u为速度图10 救灾机器人[37]Fig.10 Disaster relief robot[37]
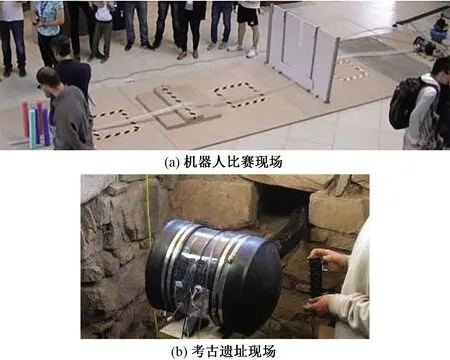
图11 机器人比赛和考古遗址应用[22]Fig.11 Robot competition and archaeological site application[22]
5.2 可重置结构
尖端生长型软体机器人的主体表面可布置物体,随着机器人的外翻生长,实现物体结构的重新配置。Blumenschein等[34]在尖端生长机器人的主体外表面布置一系列的铜条,随着机器人生长,在尖端处的铜条导体会与腔内的铜条断开,形成单极天线,改变天线的长度可以改变谐振频率。通过调整尖端生长型机器人的伸缩,即可实现对单机天线工作频率的调节,如图13(a)所示。螺旋天线可以收发外部空间中旋转的偏振电磁信号,广泛应用在全球定位系统(global positioning system,GPS)、卫星、雷达等无线通信系统,Gan等[62]通过在尖端生长机器人主体的外表面布置天线和肌腱,实现螺旋天线的制作,如图13(b)所示。软体机器人在可穿戴设备上也具有很大的潜力,Agharese等[63]设计了一款名叫HapWRAP的可穿戴设备,该设备可环绕手臂生长,并为用户提供方向和力反馈的组合,如图13(c)所示。

图12 海下尖端生长机器人[61]Fig.12 Undersea tip-growth robot[61]

图13 可重置结构应用Fig.13 Resettable structure application
5.3 医疗
在医疗领域,由于软体机器人主要由柔性材料制成,柔顺性好、刚度低,相比刚性机器人更有优势,安全性也大大提高。目前,软体机器人在医疗领域的研究主要有微创手术[64-68]、心脏外科[69]、康复治疗[70]及人工器官[71]等方面。
为了防止长期卧床不起的病人出现压疮,Nakamura等[72]利用尖端生长型机器人相对环境无摩擦的特性,设计了一种帮助病人实现床上翻身的辅助装置,这个装置具有较高的刚度,如图14(a)所示。对于涉及软组织的手术,要求手术医生在使用器械时,使导致组织损失或出血的剪切力降到最低。尖端生长型机器人可以在狭窄空间无阻力运动,可以有效降低剪切力。Slade等[38]根据此原理设计出一种用于受限环境下外科手术的低剪切力软导管,且可实现对该软导管的精准控制,如图14(b)所示。在结肠镜检查过程中,内窥镜通过弯曲的大肠时,不仅会造成患者疼痛,还会对大肠造成一定损伤[73]。Yanagida等[25]将可变刚度的尖端生长型软体机器人吹进死猪的大肠内,抽真空之后实现较高的刚度,再插入内窥镜进行检查,有效降低了内窥镜直接接触肠体的力,如图14(c)所示。
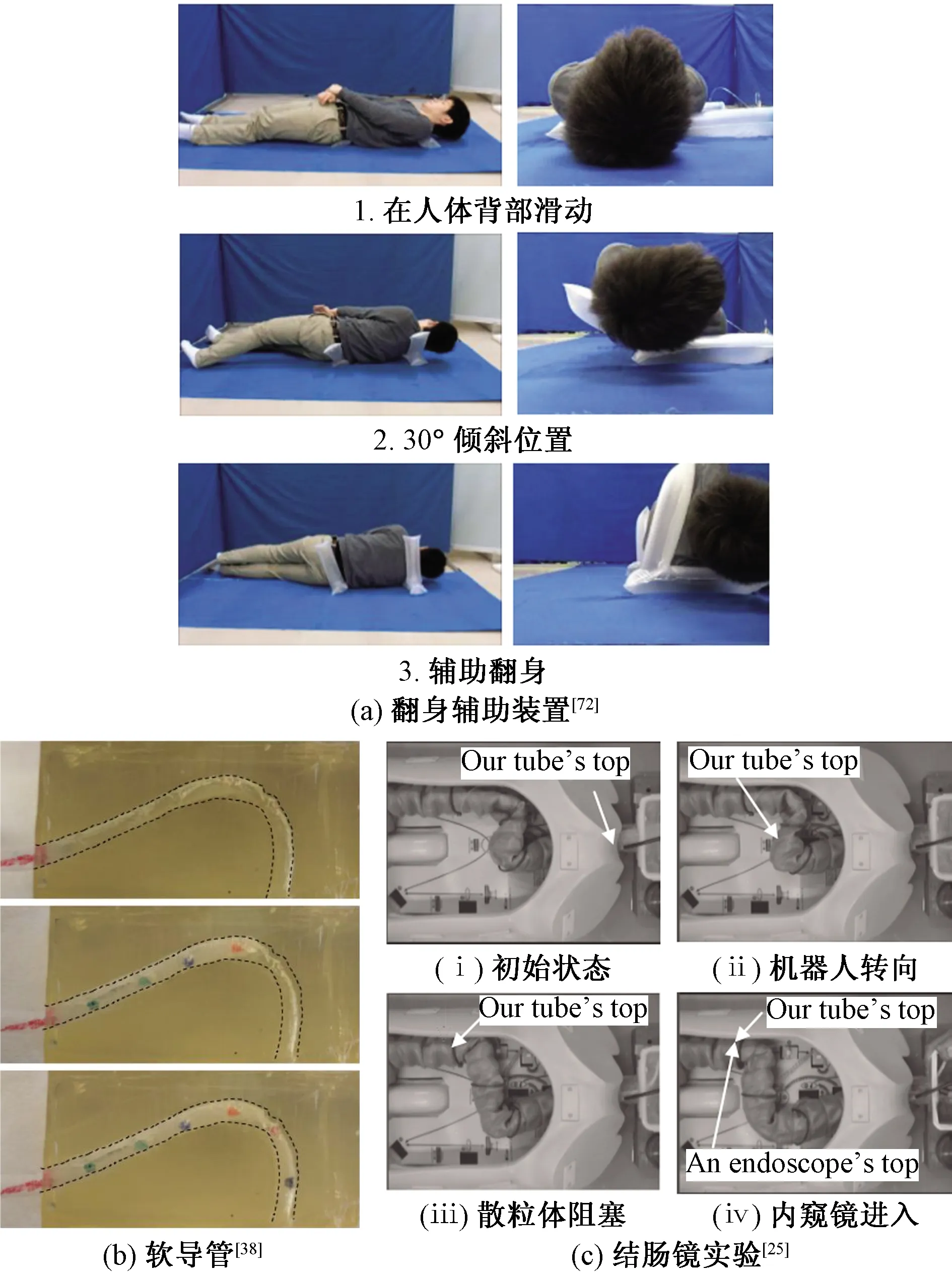
图14 尖端生长型机器人在医疗领域的几种应用Fig.14 Several applications of tip-growth robots in the medical field
5.4 其他
尖端生长型机器人还可以用作末端执行器,对物体进行抓取,由于材料是柔软的,对被抓取物体的损害极低。Stroppa等[74]基于手臂手势来遥控尖端生长机器人抓取物体,由于机器人的低惯性和柔顺性,可以实现安全的人机交互,如图15(a)所示。Jeong等[75]使用他们设计的新型尖端生长型机器人进行尖端极限受力测试,测得在机器人收缩时最大可以携带2.5 kg的重物,如图15(b)所示。Sadeghi等[76]根据植物根部尖端生长的原理,设计了一种土壤渗透机器人机构,如图15(c)所示。利用末端生长型机器人与环境交互无摩擦的特性,Naclerio等[48,77]结合颗粒流态化的原理,通过在机器人内部腔室加入空气流,实现在干燥的沙土环境中进行挖掘,如图15(d)所示。这种设备未来可以应用到泥石流或者浅层地下的搜索和救援中,尤其在低重力环境中,这种挖土机器人更具优势,未来可以应用到月球的土壤采样,甚至是更远的天体。

图15 尖端生长机器人的几种应用Fig.15 Several applications of tip-growth robots
6 总结与展望
首先提到了软体机器人目前存在的三大主要问题,针对如何解决这些问题,引出了从植物身上产生灵感的尖端生长型软体机器人,紧接着介绍了尖端生长型软体机器人的基本工作原理和结构。然后围绕提出的三个主要问题,从机器人材料选取、转向结构设计、建模及应用场景四大方面对尖端生长型软体机器人进行了详细说明。
尖端生长型软体机器人制造成本低、可扩展性强,且具有无环境阻力的独特优势,这些优势使其在许多应用领域有很大的潜力,如医疗、救灾和服务机器人等。目前,对于尖端生长型软体机器人的研究,大多停留在理论和实验阶段,暂无落地的商用产品出现,还有很长的路要走。新型材料大量出现,在未来可以尝试使用适合特定工作场景的新型材料,发挥尖端生长型软体机器人的最大性能。随着人工智能(artificial intelligence,AI)的发展,应用AI技术,实现机器人的自主操作,机器人智能化也是未来发展的一个重要方向。
