基于MATLAB 的轨道车辆几何曲线通过计算
2022-03-24麻岳敏武学良朱凯博
麻岳敏,聂 敏,武学良,朱凯博
(中车大同电力机车有限公司 技术中心,山西大同037038)
我国1/3 的铁路线是曲线,因此,机车在设计过程中必须进行几何曲线通过计算,以保证机车顺利通过小半径曲线和满足限界要求。确定机车所能通过曲线的最小半径和为此目的所需的轮对横动量,给出机车转向架通过曲线时的转心位置,确定在曲线上机车转向架对于车体的偏转角,以及车体与建筑限界的关系等[1]是重中之重。为了提高行车质量,许多学者和工程人员对这些问题进行了深入的研究。
目前工程设计人员主要采用几何作图法、几何公式计算法和参数化计算法来求解几何曲线通过。刘冰等[2]对这几种设计方法的优缺点进行了对比分析。罗仁等[3]结合绘图法得到车辆通过不同曲线时的姿态,分析了车辆连挂状态通过圆曲线S 形曲线等工况下车钩转角。李强等[4]给出了车体和转向架相对转动角度和车钩转角的几何公式,但在有含直线的S形曲线上没有给出解析解。聂敏等[5]运用解析几何的基本理论,推导出有轨电车通过平面曲线、竖曲线时铰接装置转角及车钩夹角的计算方法。王璐科[6]引入“等效曲线半径”概念,简化了原本复杂的考虑转向架偏移的机车车辆曲线通过计算。王文涛等[7]使用AutoLISP 和DCL 语言编制出机车几何曲线通过计算程序实现了自动计算及参数化绘图。丁长权等[8]介绍了基于VB 的车辆几何曲线通过参数化计算方法,求出了转向架与车体最大的相对转角。商跃进[9]利用在SolidWorks 平台下的尺寸驱动特性和方程式功能建立了B0-B0轴式轨道车辆几何曲线通过计算模板,求出了给定参数下的车体与转向架最大夹角。文献[7-9]利用参数化计算方法计算了车体和转向架的转角,但没有给出车钩转角的算法,也没有计算可通过的最小曲线半径。
针对上述问题,文中利用MATLAB 强大的功能,提出一种基于MATLAB 的轨道车辆几何曲线通过计算方法,实现求解车钩转角和最小曲线半径的简便化和可视化。
1 计算原理
1.1 几何曲线通过
1.1.1 车钩转角的计算[5]
机车通过曲线时,相邻两车辆的中心线将会出现相对转动,车钩中心线相对车体也会出现相对转动,产生的相对运动会影响车辆运行平稳性和安全性。因此,在新车型设计时,需要计算连挂车辆通过曲线时的车钩转角和对应的轮对横动量,避免产生干涉以确保列车能够安全通过曲线。利用“等效曲线半径”来求解车钩转角,如图1 所示,在该计算中假设相邻接车钩不能相对转动,始终在一直线上,且相邻两车钩旋转中心距离不变。

图1 机车过曲线示意图
根据几何关系求解车钩转角为式(1)、式(2):

式中:γ1和γ2是车钩转角,∠PBO、∠OBC、∠OCQ、∠OCB是和两节车体轮对总横动量有关的参数。
PA、PA′、QD、QD′表示车体中心到转向架中心之距;AB、A′B′、CD、C′D′ 表示转向架中心到车钩旋转中心之距;BC表示两车钩旋转中心之距;OP、OQ表示曲线中心到车体中心之距;AA′和DD′表示车体总横动量。
通过这2 个方程可以在车体轮对横动量已知的情况下,求出车钩转角;也可以已知一个车钩允许的最大转角,求出另一个车钩转角和车体轮对横动量(默认2 节车的轮对总横动量相同)。
1.1.2 机车能通过的最小曲线半径[1]
转向架式机车能够通过的最小曲线半径,受限于转向架在构造上允许的最大转角。当机车通过曲线时,转向架相对于车体产生的转角,曲线半径越小,转角越大。当两转向架各自的端轴用尽了横动量之后,各转向架以外端轴贴靠外轨,内端轴贴靠内轨,此时为机车通过最小曲线半径Rmin时的情况。为了简便且考虑安全裕量,假定各轴均无横动量,根据几何关系,可求出可通过的最小曲线半径为式(3),如图2 所示。

图2 机车通过最小曲线半径的示意图

式中:a为转向架中心距;θ′为转向架构造上允许的最大转角;θ表示转向架轮对分别靠内外轨产生的角度,为式(4):

式中:p为转向架轴距;σ+Δ 为轮缘与钢轨的总间隙。
1.2 MATLAB 参数化
MATLAB 是功能全面、操作直观和简洁的数据计算和处理的计算软件,其数学计算方面功能相当强大,实现及验证算法非常便利,同时具有非常强的编程和结果的可视化功能。文中利用MATLAB 自身的函数来求解几何曲线通过,利用GUI 来可视化。每一个GUI 界面对应着一个M 文件,根据数学模型,编辑相应的M 文件,在GUI 界面输入初始条件,点击运行,得到结果。通过GUI,用户就可以不需要输入任何的脚本或命令,不需要了解任务的内部运行方式,只要用鼠标点击系统窗口中的按键,就可能轻松得到想要的结果。
几何曲线通过计算界面分为3 个模块,可分别去计算求解,它们之间互不干涉,每1 个模块都可单独生成研究报告,如图3 所示。模式1 是已知轮对总横动量求车钩转角,模式2 是已知最大一车钩转角求另一个转角和轮对总横动量,模式3 是求可通过最小曲线半径。可视化界面还设置了工具栏,放一些常用的工具以方便操作者使用。

图3 几何曲线通过GUI 界面
MATLAB 提供了一系列的画图函数,用户不需要过多的考虑画图的细节,仅仅给出一些基本参数就能得到所需图形。绘制几何曲线求车钩转角图原理:以O点为坐标原点(0,0)。根据给定的参数,来确定点P、B、C、Q的坐标,然后将其各点依次连接,再根据向量内积和向量长度计算出车钩转角。最后通过输出函数将结果显示在图上。绘制求最小半径图原理:根据数学公式,输入运行参数,得到最小半径值。将各点的坐标值通过画图函数连接起来,最后通过输出函数将结果显示在图上。
MATLAB 可以将编制好的独立可执行程序发布为后缀.exe 的应用程序,此程序可脱离MATLAB 环境独立运行。为了便于本程序的传播和交流,最后将本程序发布为后缀.exe 的应用程序。
2 应用实例
选取某B0-B0轴式机车车辆几何曲线通过计算主要技术参数,见表1。利用MATLAB 求解车钩转角和最小曲线半径。

表1 机车几何曲线通过主要技术参数 单位:mm
2.1 计算工况
工况1:曲线半径为200 m。
工况2:曲线半径为250 m。
工况3:曲线半径为200 m,最大允许车钩转角γ1max=6°。
工况4:曲线半径为250 m,最大允许车钩转角γ1max=6°。
2.2 计算结果
将表1 技术参数输入到GUI 界面上模式1 和模式2,计算各工况下的车钩转角以及求已知最大的一车钩转角情况下的轮对横动量和另一车钩转角。B0-B0轴式机车几何曲线通过计算结果见表2,并生成图4、图5。

表2 计算结果
机车车辆通过曲线半径200、250 m 时得到的车钩转角示意图,如图4、图5 所示。为了验证用MATLAB 编程来计算车钩转角的可靠性,利用CAD 绘图软件通过几何绘图法分别绘制出了过曲线半径200、250 m 时的车钩转角并进行测量,如图6、图7 所示。当横动量为82.5 mm,机车通过几何曲线半径为200、250 m 时,车钩转角分别为13°和10°,14°和9°。通过2 种方法的计算结果对比发现,曲线半径为200 m 时,误差相对较大,曲线半径为250 m 时,计算结果基本一致。因为CAD 绘图时,将车体长度、转向架长度和车钩长度的横向投影距离默认为实际长度距离,存在着误差,造成曲线半径越小,误差越大。而软件程序计算依据公式法完成,公式在前期假设了一些理想条件,也会对程序计算结果造成一定误差。无论是绘图法的误差或者程序化的误差,都在允许的范围内,不影响机车车辆设计分析需要。
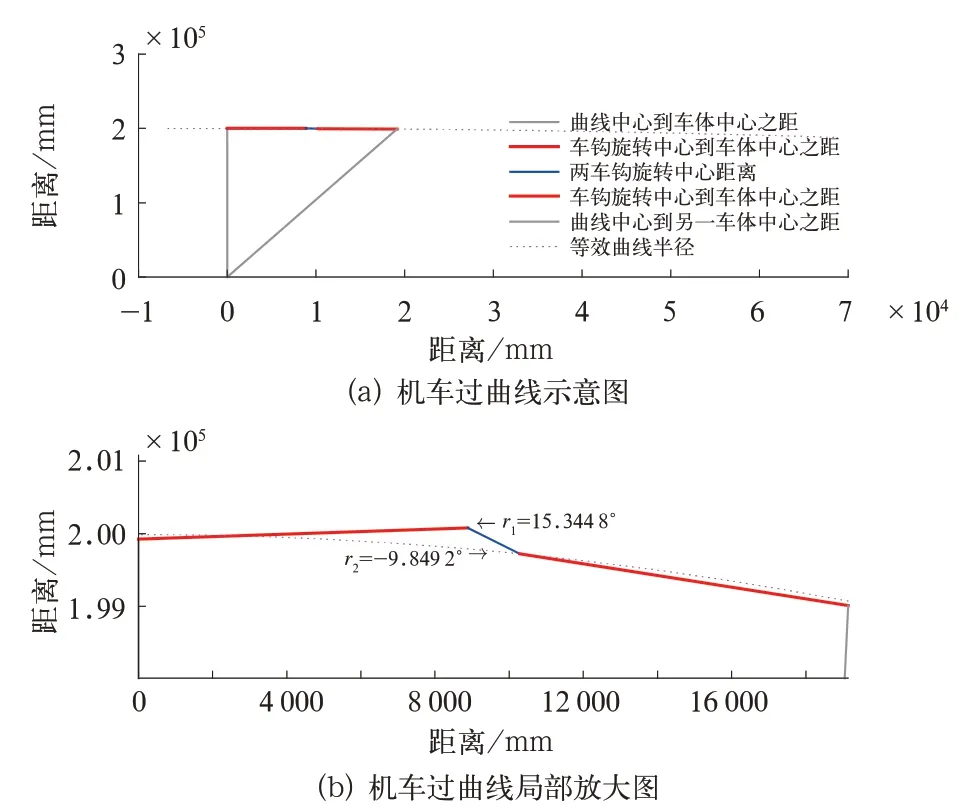
图4 过曲线半径200 m 时的车钩转角
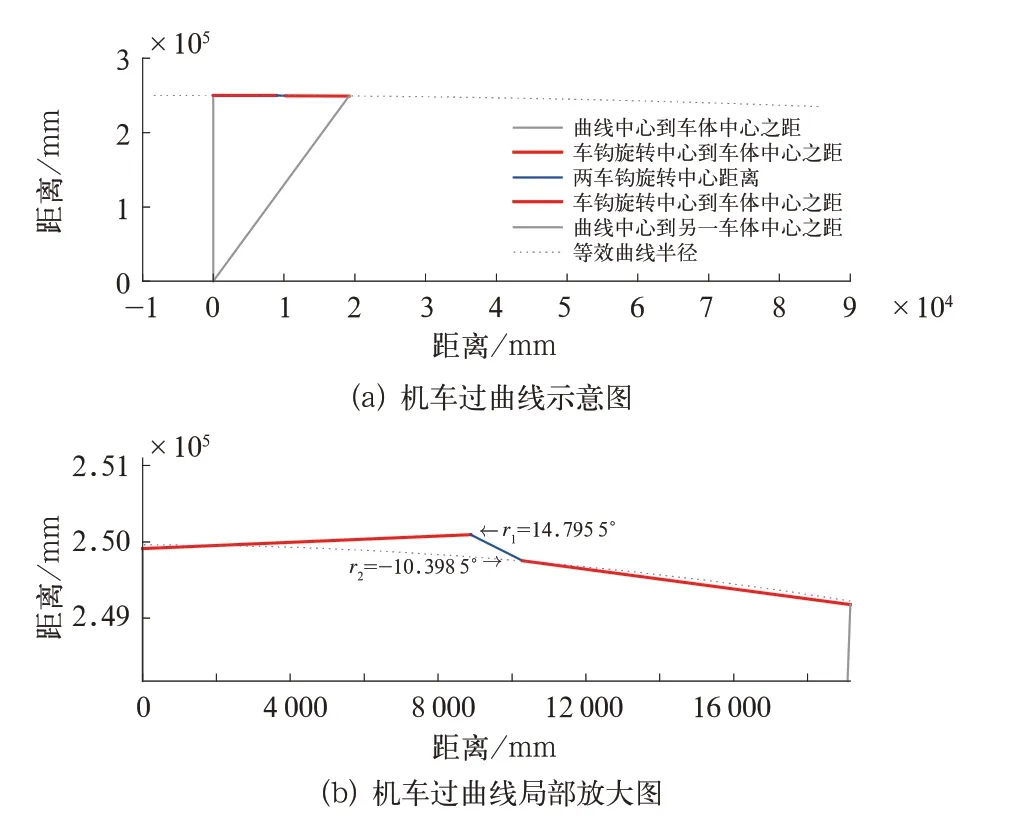
图5 过曲线半径250 m 时的车钩转角

图6 过曲线半径200 m 时的车钩转角(CAD 作图)

图7 过曲线半径250 m 时的车钩转角(CAD 作图)
当假设转向架构造上允许的最大转角为θ′=2°,在GUI 界面输入运行参数求得该车型通过的最小半径为109.242 4 m,示意图结果如图8 所示。为了更直观的了解它们的关系,通过MATLAB 画出转向架构造上允许的最大转角和最小曲线圆半径的关系图,如图9 所示。从图9 中可以看出,最小曲线圆半径受转向架构造上允许的最大转角影响很大。因此,合理确定转向架构造上允许的最大转角是确定最小曲线圆半径的关键。
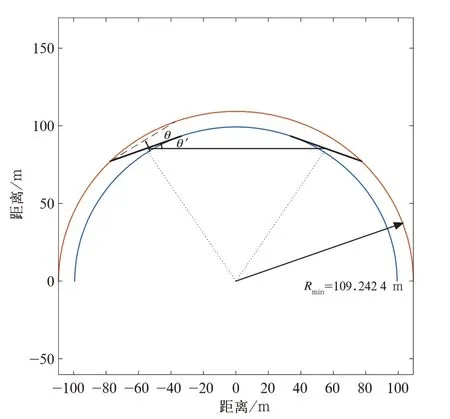
图8 机车通过最小半径示意图

图9 转向架构造上允许的最大转角和最小曲线半径关系
3 结 论
文中利用MATLAB 设计出一种非常简明、直观的操作方式来解决目前计算几何曲线通过存在问题,采取计算机结合编程来处理数据,将现有的几何曲线通过计算程序化,尽可能地挖掘出数据所包的各种有用信息。
运用GUI 图形界面,降低团队其他成员对计算机语言的要求,进而提高了工作效率。通过程序画出的示意图,能直白地表达出所求参数。计算程序化的开发对企业的设计能力和影响力的提升有重要意义。
生成独立的可执行的.exe 程序文件,可以在未安装MATLAB 程序的电脑直接执行,使其使用范围更广,实用性更强。
本研究主要针对计算车钩转角和最小曲线半径,而几何曲线通过要解决的问题远不止这些,因此下一步还需要不断地完善和改进,并不断扩充其功能。