微通道板式换热器动态特性分析
2022-03-24陈倩
陈 倩
(南京协众汽车空调集团有限公司, 江苏 南京 211100)
1 前言
微通道板式换热器即冷凝器, 由扁管、 翅片、 集流管及储液器等结构组成, 属于空调系统, 其作用是将压缩机输送的高温高压的气态冷媒转换为具有一定过冷度的高温高压液态冷媒。 为了简化车辆在制造期间的装配, 一般将几种换热器与冷却风扇联合在一起安装, 并将这种系统称为冷却模块。 冷却模块中的换热器结构, 均有一个共同特点, 包含扁管和翅片结构, 故本文以冷凝器为研究对象,对此结构进行仿真分析, 为整个冷却模块的仿真建模提供一种方法。
冷凝器的动态特性, 一般通过有限元计算与试验两种方法获取, 同时通过对比仿真结果与试验结果的差异性,也验证了有限元建模方法的准确性, 为冷凝器振动分析及冷却模块振动分析的准确性奠定了一定的基础。 本次选取模态仿真与模态试验进行验证, 主要是因为相比于爆破试验, 模态试验不会损坏冷凝器, 并且能够很好地对标冷凝器的刚度属性, 而且后续的振动分析也是基于模态结果之上。
冷凝器中的翅片结构, 结构复杂数量巨大, 若建立详细的有限元模型, 计算机无法带动计算, 故需对其简化方法进行研究。 本文首先选取一部分扁管翅片, 对比分析简化方法之间的差异性, 选取最优简化方案, 进行后续的有限元仿真。 同时对冷凝器样件进行模态试验, 验证简化方案的可行性。
2 翅片简化方法对比计算
图1为冷凝器翅片的几何模型, 翅片的每个波上均有开窗结构, 若详细建模, 则最小网格尺寸仅0.2mm, 冷凝器有40~60根扁管, 网格总数量将达到千万级别, 若再进行冷却模块计算, 则计算机将无法计算。 为了找到仿真分析效率与仿真精度之间的平衡, 建立了3 种模型进行对比分析, 并对不同的网格尺寸进行对比计算, 最终确定最优的简化方法,如图2所示。
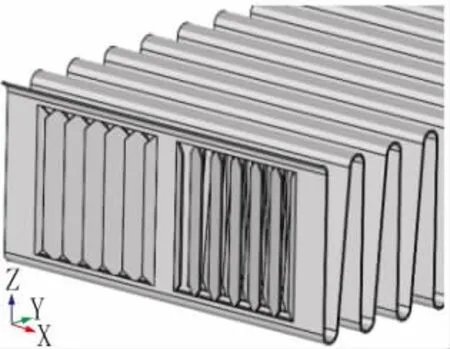
图1 翅片几何模型
图2a中原模型为翅片未简化模型, 选取1 根翅 片, 2根扁管进行计算; 图2b中模型将翅片开窗忽略, 建立壳单元简化翅片与扁管; 图2c中模型将扁管简化为各向同性壳单元, 翅片简化为各向异性体单元, 并使用三明治夹心的等效方法近似求出各向异性材料参数, 分别为X方向等效弹性模量 (Ex) 5269MPa, Y方向等效弹性模量 (Ey)1434MPa, Z方向等效弹性模量 (Ez) 4645MPa, XY面内等效剪切模量 (Gxy) 270MPa, XZ面内等效剪切模量 (Gxz)1746MPa, YZ面内等效剪切模量 (Gyz) 6.4MPa, 等效密度(ρ) 2.177Et/mm。
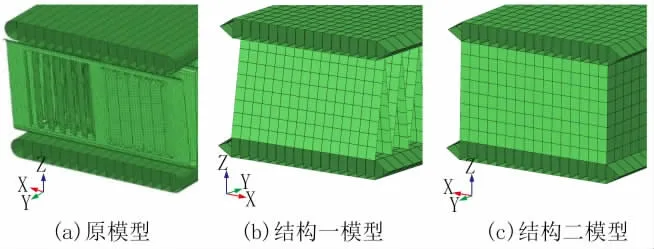
图2 翅片简化
将3个模型的两侧约束, 对比约束状态下3种简化方法得出的模态结果的差异性, 如表1所示。

表1 模型对比分析
从表1结果可以得出, 简化方法一的结果与原模型结果差异较大, 无法使用; 简化方法二的结果与原模型较为接近, 此种简化方法可以使用。 为了进一步减少网格数量,继续对此种简化方法进行网格大小的验证计算。 简化尺寸定义如图3所示, 长度L、 高度H、 宽度T, 并根据模型的尺寸与网格品质的要求,翅片的宽度T方向分别选取16/8/4/2 个单元进行计算, 翅片的高度方向分别选取8/4/2 个单元进行计算, 翅片的长度方向分别选取1.2mm/2.4mm/4.8mm 大小的单元进行计算。
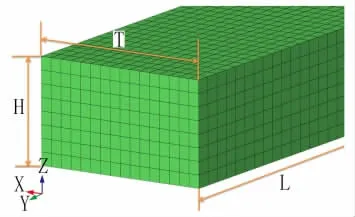
图3 翅片模型简化尺寸
单条翅片简化后的网格数量如表2所示, 分别计算不同组合的模态结果, 得出与原结构的频率差异百分比如表3所示。
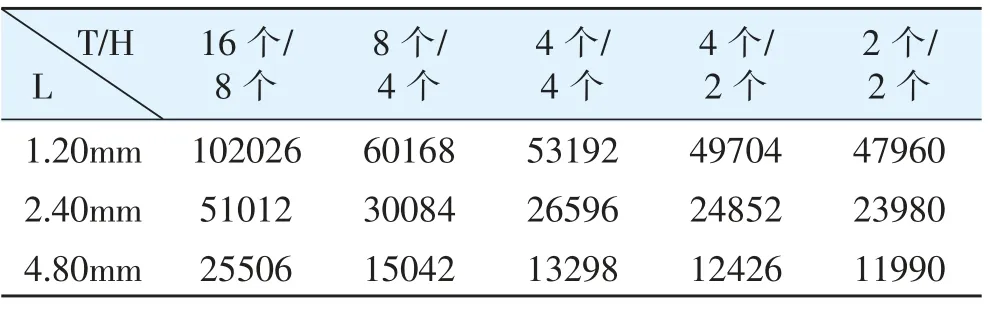
表2 不同模型网格数量 单位: 个
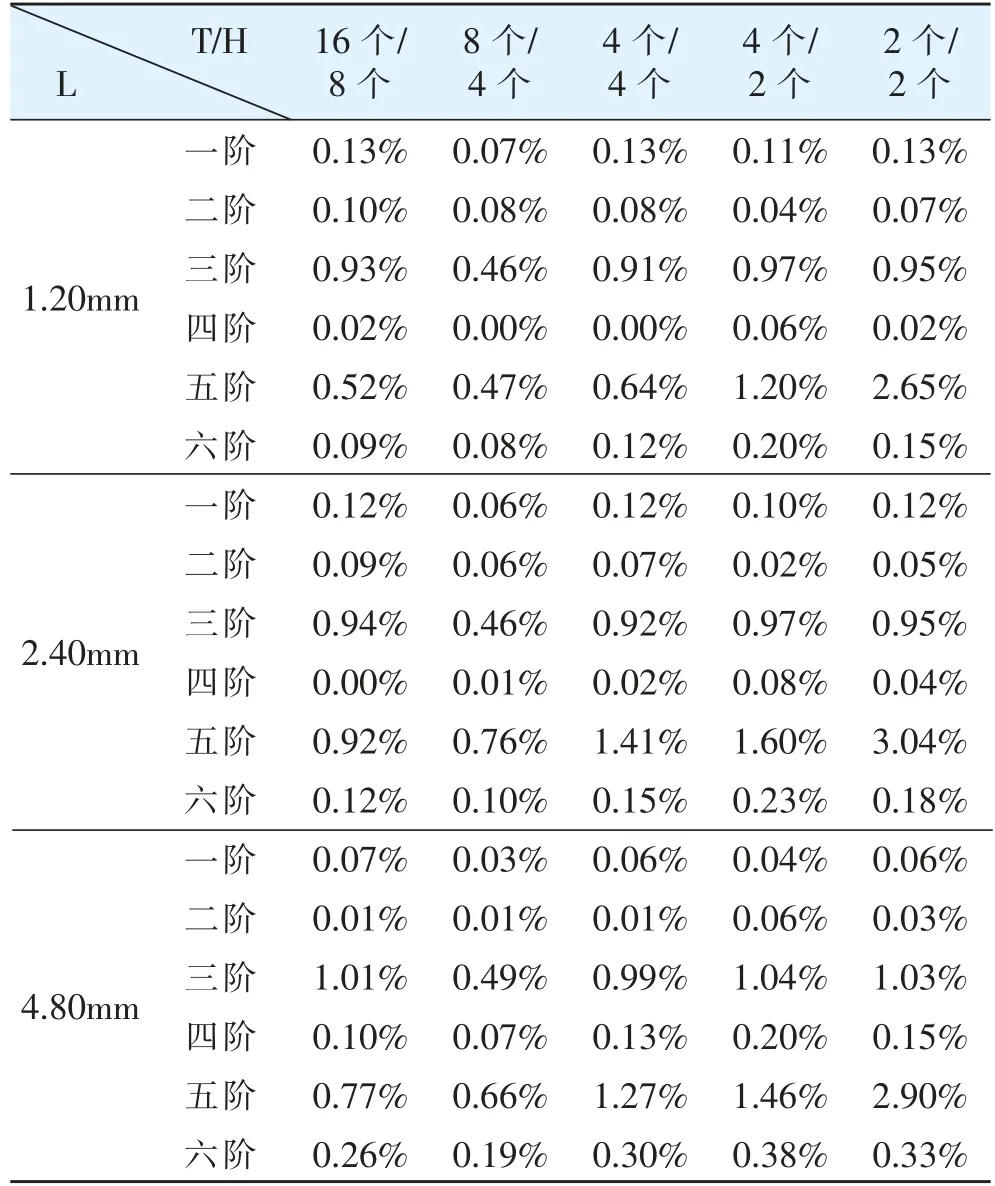
表3 约束模态频率差异百分比
最后根据计算结果选取网格数量较少, 且计算误差小于2%的结构进行后续计算。 从结果可以看出, 简化后翅片宽度T与高度H分别为2个单元时, 误差大于2%, 其余简化结构误差均小于2%。 故选取网格数量较少的模型,翅片宽度T 分布4 个单元, 翅 片 高 度H 分 布2个单元, 翅片长度L网格大小使用4.8mm, 最后使用翅片简化模型如图4所示。
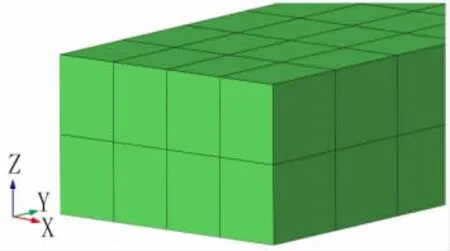
图4 翅片简化结构
3 冷凝器动态特性仿真与试验
3.1 模态试验
分别对冷凝器简化后模型进行自由模态及约束模态的仿真与试验, 模态试验如图5所示。
冷凝器自由模态试验时, 选择在消音室内用弹性阻尼绳悬挂冷凝器, 使冷凝器自由地悬浮在空中, 如图5a所示,且经过悬挂测试可知冷凝器晃动频率为1~2Hz, 小于其一阶弹性模态频率的1/10, 满足冷凝器自由边界条件的要求。
冷凝器约束模态时, 使用此款冷凝器专用工装, 且试验测得此工装一阶频率大于200Hz。 将工装安装在振动台上进行测试, 如图5b所示。
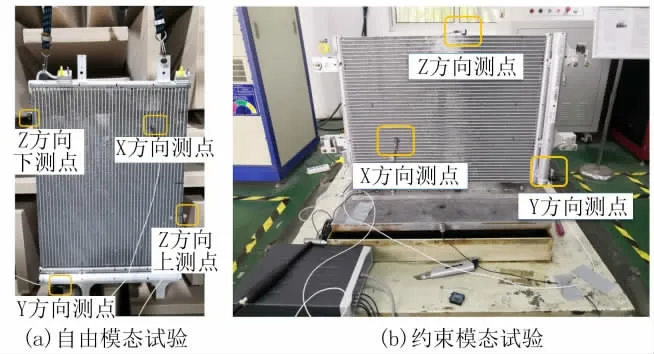
图5 模态试验
试验时, 输入信号使用力锤敲击, 输出信号采用单向加速度传感器进行测量, 采集仪使用LMS的八通道数据采集仪。 首先建立线框模型, 如图6所示, 输入点需根据整个冷凝器的外形进行布置, 并且尽量避开每个振型的节点位置。

图6 模态测试测点分布
锤击法测试时, 需要确保模型是线性, 故首先对冷凝器结构进行互异性测试, 判定其系统非线性程度。 选取两点分别做激励点与响应点, 测得两条传递函数, 进行对比,得出1600Hz内的传递函数基本一致。
测试时, 需观察每个点的相干函数, 可以看出500Hz范围内的相干函数基本高于0.8, 其中个别频率的相干函数较差, 但并不影响模态分析, 可继续进行后续的模态试验分析。
进行模态参数识别时, 使用模态参数估计方法PolyMax(也称为参考点最小二乘复频域法, Polyreference least squares complex frequency domain method), 选取所有点的频响函数进行计算, 得出模态的稳态图, 分别如图7、 图8所示。 通过选择具有稳定标注s的频率, 确定真正的模态频率, 提取出模态参数, 进而得到冷凝器的模态频率。
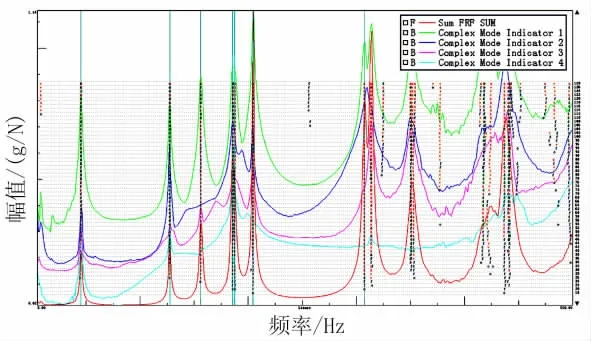
图7 自由模态稳态图
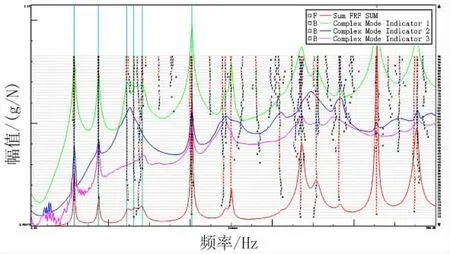
图8 约束模态稳态图
3.2 模态试验与仿真对比
最后将仿真结果与试验结果进行对比分析, 自由模态频率差异如表4所示, 约束模态频率差异如表5所示。 自由模态振型云图见图9, 约束模态振型云图见图10。
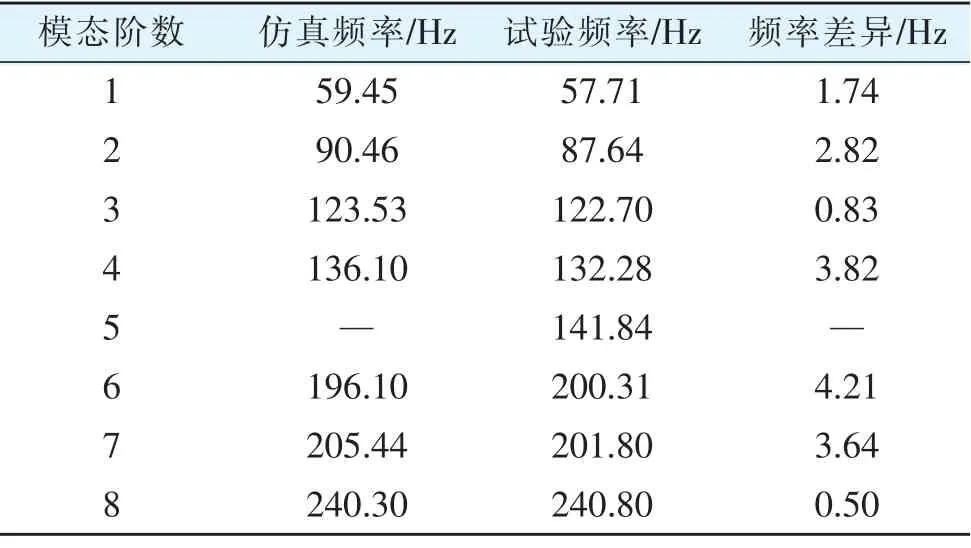
表5 冷凝器约束模态仿真及试验结果对比
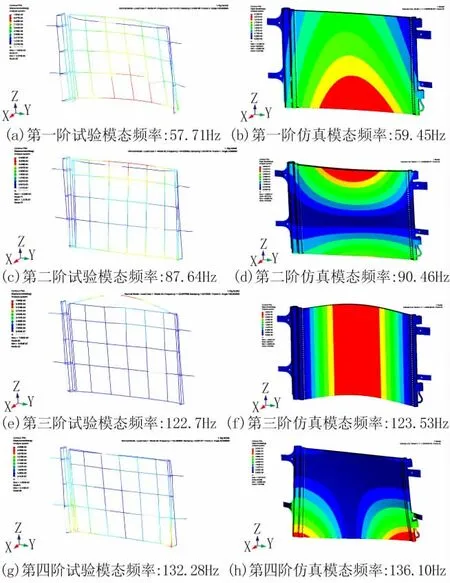
图10 约束模态振型云图
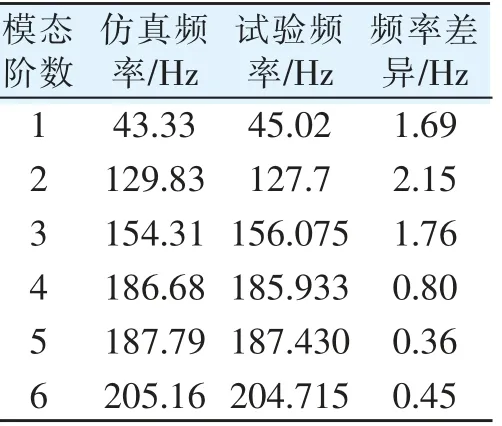
表4 冷凝器自由模态仿真及试验结果对比
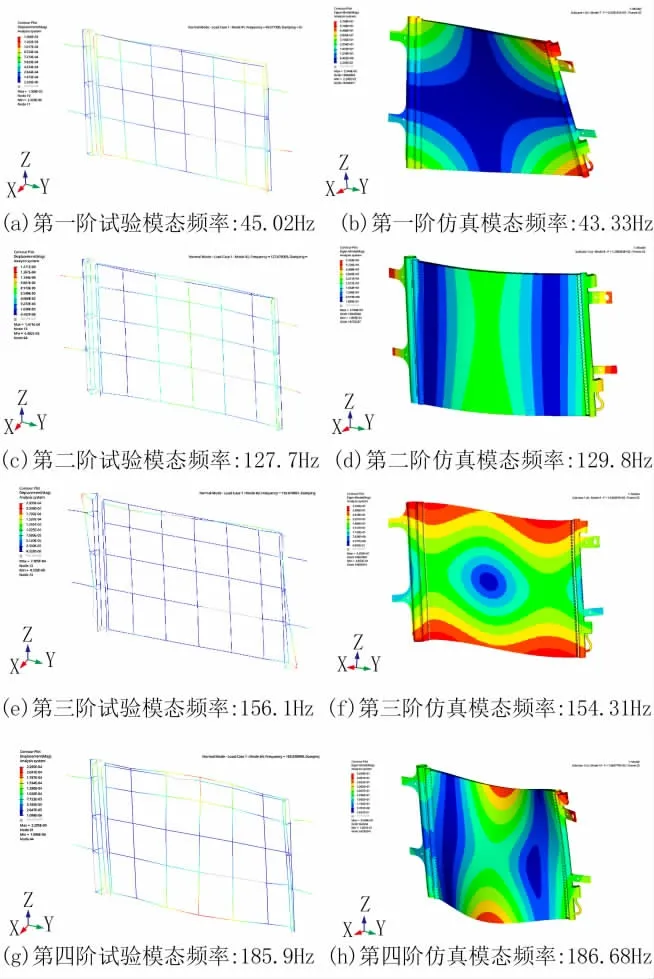
图9 自由模态振型云图
振型差异使用模态置信因子进行评估, 它主要判定两阶模态向量之间的相关性水平。 它既可以比较验证试验本身的模态结果是否真实, 同时还可以用来比较试验结果与仿真振型结果的相似度。 当MAC值接近1时, 表明这两阶振型非常相似, 当MAC值接近0时, 表明这两阶振型非常不相似。 仿真与试验振型对比结果分别如图11、 图12所示。
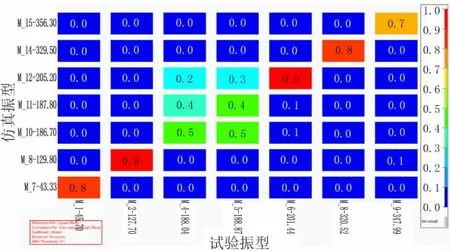
图11 冷凝器自由模态仿真及试验振型相似度对比
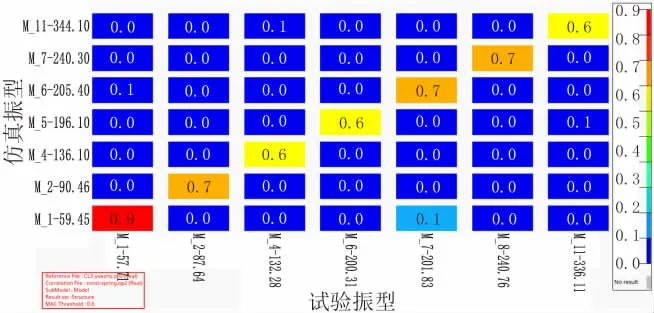
图12 冷凝器约束模态仿真及试验振型相似度对比
自由状态时, 由于结构本身第四阶与第五阶振型比较相似, 故第四阶与第五阶MAC值相似度较小, 其余几阶对应较好。 约束状态时, 样件与工装之间存在一定的晃动,故仿真时使用了弹簧单元等效此种晃动状态, 可能由于定义的弹簧单元X向刚度稍大, 引起了第五阶模态丢失的情况, 其余几阶模态对应较好。 当仿真与试验的模态振型相对应时, 约束模态与自由模态频率差异误差控制在5%以内, 对应较好。
4 总结
本文通过对比分析确定冷凝器仿真分析的最优简化方法, 即将冷凝器芯体结构使用三明治等效原理进行简化,并通过锤击法模态试验验证此种简化方法的准确性, 得出自由模态频率差异3Hz以内, 约束模态频率差异5Hz以内,且通过振型相似度量化了振型的差异性, 得出振型对比良好, 为换热器芯体建模提供了理论依据, 并为管翅结构的流程化自动化建模奠定基础。
