负压吸附式无轨光伏板清洁机器人结构设计
2022-03-23王林孙慧平汪金芝
王林,孙慧平,汪金芝
(1.宁波工程学院 机器人学院,浙江 宁波 315211;2.宁波工程学院 机械工程学院,浙江 宁波 315336)
0 引言
随着全球能源危机的日益突出和可持续发展的需求,电能作为一种取之不尽、用之不竭的洁净能源,成为人类的优先选择;以风电、光伏等新能源发电为主的清洁电力系统正在逐步取代以化石能源发电为主的传统高碳排放电力系统[1-4]。我国西北荒漠地区日照充足,是建设光伏发电厂的理想地,目前已建有光伏电厂约6 050座,折合光伏板面积约3.46亿平方米。但是光伏板在实际使用过程中,空气中的微小颗粒容易积聚在光伏晶片表面形成积灰,降低光伏发电的光电转换效率[5-7]。当积灰密度0.64 g/m2时输出功率降低约14.26%[8]。严重时还会造成光伏晶片表面温度不均,过热损毁。因此,对于光伏发电厂而言,如何高效清洁光伏板成为一个亟待解决的问题。
1 发展现状与存在问题
光伏板积尘清洁主要有人工清洁和机器人清洁。荒漠地区气候炎热,人工清洁需要操纵长约3 m的清洁刷,耗时费力、劳动强度大,且清洁效率低;近年来,受光伏发电产业蓬勃发展的刺激,国内外已有光伏板清洁机器人产品面世,但主要为有轨式,又可分为单排和跨排两大类。
单排清洁机器人仅能完成1列光伏板的清洁,国内对该技术的研究最为深入。这类产品一般由行走系统、导向系统、清洁系统、电池和控制系统组成。导向系统主要用于机器人限位和导向,防止因速度过快而超出组件边框。工作时,清洁机器人的行走轮沿光伏板组件边框行走,用于清洁的毛刷高速转动;毛刷在转动过程中,先将积灰从光伏板表面掸起,然后在毛刷的冲击和旋转气流的共同作用下将积灰驱赶至组件缝隙处脱落。单排清洁机器人需要改造光伏板,在光伏板表面周围加设轨道,而风沙容易堵塞运行轨道,存在故障率高、维护不便、运行费用高等问题。
已规模化应用的跨排清洁机器人主要有两种。一种是车载式清洁机器人。多采用水清洁,清洁装置安装在工程车上,由工程车实现跨排清洁。该类产品不仅需要安装移动水箱,体型笨重、使用不便,而且清洁装置易对光伏板组件造成损坏,只适用于地势相对平坦、水资源丰富的光伏电站,同时光伏电厂中每排光伏板间距经常不到1 m,车辆无法顺畅通行。一种是摆渡车式清洁机器人。由清洁机器人、摆渡车以及地面轨道等附属设施组成。采用该技术现场施工量大、施工周期长,对地面轨道载体的平整度要求高,复杂的环境和地形地貌会导致成本陡增,且设备易发生倾覆[9]。
当前我国供电系统是以大机组、大电网、高压电为主要特征的集中式单一供电系统,在电网中任何一点故障所产生的扰动都会对整个电网造成较大影响,严重时可能引起大面积停电甚至全网崩溃。因此电力产业如何高效节能发展,面临着新的选择。分布式能源以其环保、高效、灵活的运行方式脱颖而出。但分布式光伏电站存在障碍物多、排布不规则的问题,单排和跨排清洁机器人都无法完全清洁整个电站,便携式清洁机器人却可解决这一难点。因此,设计一款基于负压吸附原理的无轨干式光伏板清洁机器人,对提高光伏发电效率、促进我国光伏产业发展具有重要意义。
2 设计方案
便携式清洁机器人在光伏组件表面运行过程中主要依靠旋转的毛刷对光伏板表面进行清洁,因此防止机器人从光伏组件表面跌落是确保其正常工作的重要前提。本文设计的是一种无轨干式光伏板清洁机器人,适用于整列光伏板清洁,能在无水、无清洁剂条件下,依靠负压吸附作用,贴附于光伏组件表面移动的同时快速地完成清洁任务。
2.1 工作原理
为提高太阳能转换效率,使阳光直射光伏晶片表面,光伏板均需倾斜安装,在中国西北荒漠地区,光伏板安装倾角度约为45°。该机器人在板上的受力分析如图1所示。为确保能够在光伏板上平稳移动,需额外增加垂直于光伏板表面的压力,本文所述的负压吸附式清洁机器人采用涵道风扇提供此压力。

图1 机器人在光伏板上受力分析
当光伏板倾斜角度为α时,若保证该机器人在光伏板表面不滑落,维持平衡状态时负压力F须满足

该机器人吸附在接触面的负压力F由涵道风扇提供,涵道抽取机器人底部空气,使该机器人上下表面形成压强差,此过程原理如图2所示。根据压强公式:F=S×PV(其中S为机器人底盘面积,PV为近似的抽气面压强差),该机器人维持静止状态所需最小压强差为:

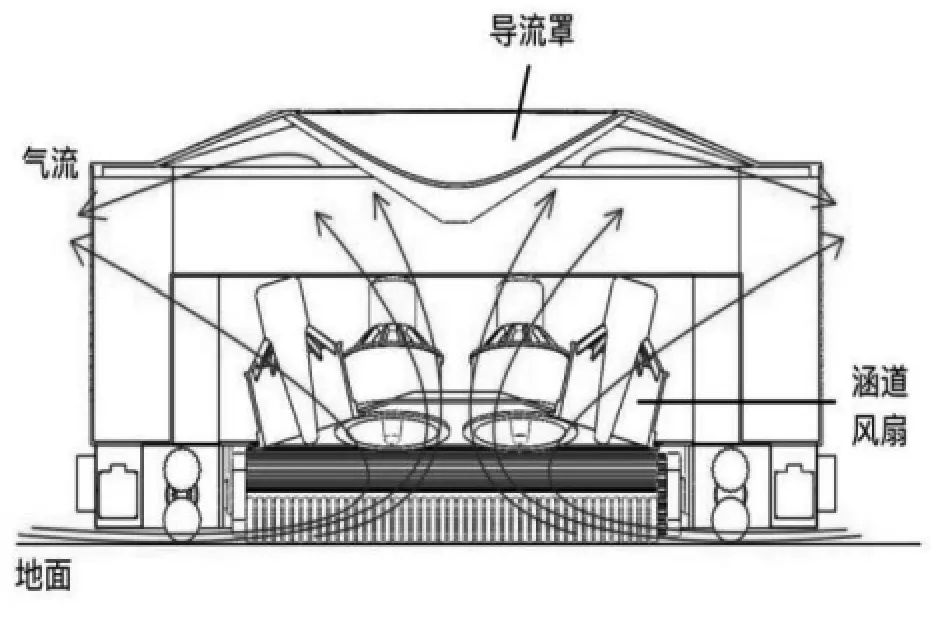
图2 涵道风扇负压形成示意图
忽略空气重力,根据伯努利方程可知流体的流量与压强差之间的关系,最小压强差与涵道排风风速v之间满足(ρ为空气密度):

记机器人底盘周长为L,底盘与光伏板面的垂直距离为d,若将外围的柱面作为进风口,单位时间内的风量Q=Ldv,则所需最小排风量为:

当机器人总重量G、倾角α、摩擦系数μ、空气密度ρ、机器人底盘尺寸和距离光伏板面距离已知时,绘制的函数图像如图3所示。机器人负压腔需要排开的风量随着底盘与光伏板面垂直距离d的增加而增加。因此,为了更易满足机器人在斜面上的压强差需求,应将底盘设计得比较低。同时,当光伏板倾斜角度α增大时,需要的排风量显著增加。

图3 不同光伏板倾斜角度下排风量与底盘-光伏板面垂直距离的依赖关系
2.2 总体结构组成
根据理论分析,最终设计的清洁机器人尺寸为(长×宽×高)800 mm×800 mm×350 mm,整体结构由导流罩、集尘箱和底盘部件3部分组成(图4)。

图4 负压吸附式无轨光伏板清洁机器人:(a)整体构造;(b)底盘结构;(c)底盘平面线图(隐藏双刷)
工作时无需人工干预,仅需将其放置于光伏板表面,可在整列光伏板上自主移动、跨板,同时无死角地完成整列光伏板的清洁。在整个工作过程中,由单片机控制清洁机器人自动寻边、纠偏、加速、减速和越障,有完全的自适应轨迹规划功能。
如图4(a)所示,在清洁过程中导流罩将涵道风扇排出的含尘气流导向内置的集尘箱处,质量较重的沙粒和灰尘落在集尘箱底部,较细的微尘在透过集尘箱四周的收尘布时被捕集附着于收尘布中,从而完成清扫和灰尘收集,并且防止二次污染。
底盘是该机器人的核心组成部分,如图4(b)、4(c)所示。电池模块采用18650锂离子电池作为电源;STM32单片机、42步进电机和各种传感器构成运行控制系统。4组由硅胶刷和干毛刷组成的双刷清洁部件,在底盘下侧围成半封闭负压腔,8台70 mm 6S 2 300 kV涵道风扇产生最大17.92 kg的推力,使得机器人稳定贴附于光伏板表面。双刷清洁部件左右两侧安装步进电机;其中主传动电机控制双刷的旋转速度和旋转方向,产生满足该机器人在光伏板上运动所需的动力;翻转电机根据前行方向控制前后双刷的相对翻转,也可调节运动方向两侧双刷的俯仰角度,从而改变负压腔密封程度以控制负压力大小。
为兼顾便捷和快速维修,内部各部件(除单片机等核心元部件外)采用快拆设计,可以快速地将故障元件替换维修,有效的降低维修成本,而且帮助节约时间,保证清洁机器人尽快的投入后续工作。采用快拆设计的同时也为该清洁机器人预留了可更新迭代的空间,在未来能够根据不同的工作环境单独设计可替换部件,以扩展使用范围。
2.3 清洁装置的设计特点
清洁采用独创的“三合一”方式。双刷清洁部件由干毛刷与硅胶刷两部分构成。干毛刷负责将吸附性较强的灰尘从光伏板上分离,并扫入半封闭式清扫腔;涵道风扇吸走干毛刷扫下的灰尘,并通过顶部的导流罩送入集尘箱;硅胶刷负责清洁、收集微量残留灰尘。
4组双刷清洁部件构成围堵灰尘的闭合网,在涵道风扇提供的负压力下:
1)前进方向前方干毛刷紧贴光伏板表面,主传动电机控制干毛刷自转刷下灰尘,并提供前进动力;
2)前进方向后方主传动电机根据爬升/滑落的需要控制硅胶刷提供不同旋向的自转及转速,确保机器人在光伏板表面匀速运行;
3)运动方向两侧的双刷,通过翻转电机调整俯仰角度,改变清洁部件与光伏板间的距离和负压腔的密闭程度,并在发生故障或出现异常状况时两侧的双刷紧贴光伏板表面抱死,起到紧急制动作用。
2.4 传感器安装设计
在负压吸附式光伏板清洁机器人的底盘外圈安装激光测距传感器、环境光传感器和陀螺仪;双刷清洁部件两侧的支座下侧安装力传感器,如图4(b)、4(c)所示分别为:
1)激光测距传感器采集机器人底部与光伏板表面的距离信号,通过采集的时间信号长短判断运动方向前方是整列光伏板的边缘还是拼接棱。根据激光测距传感器采集的信号,清洁机器人可在单片机控制下实现运动至预定工作初始坐标、跨越光伏板拼接棱、在光伏板边缘转向等动作。
2)陀螺仪检测运动速度方向与重力方向间夹角,判断该机器人运动是否偏离预定路线;并由单片机控制,通过算法调整各部件工作状态,对该机器人运动方向进行纠偏,确保其不偏离预定的清洁轨道。
3)运动方向前后2只环境光传感器通过比较清洁前后光伏晶片表面的反射光强度判定清洁效果。若反射光强度变化不大,则本次清洁未达标,机器人在清洁工作结束后报警,提醒工作人员对此列光伏板进行再次清洁。
4)8个力传感器实时监测压力大小,不间断测量双刷清洁部件两端的压力变化情况,若某部分压力发生剧烈变化,则由单片机调整涵道风扇工作参数,及时调整负压腔内气压,确保机器人能够安全的进行清洁作业,防止跌落损坏。
3 设计验证
在以上结构设计的基础上,采用轻合金、3D打印件作为外框架,制作了该机器人的负压吸附核心技术验证机,关键点如下:
(1)搭载8台70 mm 6S 2 300 kV涵道风扇,单台最大推力2.24 kg,8台最大总推力为17.92 kg;STM32单片机输出特定PWM波,驱动电调改变涵道风扇工作状态,改变负压腔气压,可实现稳定贴附于倾角30°~45°的光伏板上;
(2)通过搭载STM32单片机、多种不同类型的传感器和CAN总线系统控制设计,实现斜滑面光伏板上平衡的同时移动,并基本实现了移动同时按照预定轨道自主清洁;
(3)在倾角30°~45°、自然环境下积灰约1个月的光伏板上,由高能电池组供电,能够连续工作2 h,清洁效率约150 m2/h,达到设计要求;
(4)在移动、清洁同时进行的基础上,实现跨板(缝隙宽约4 cm)自如,在跨板过程中负压腔无明显气压降或运动姿态的改变;
(5)采用了“三合一”的清洁方式,通过干毛刷剥离、气流吸附和硅胶刷刮尘3级清洁,由内部集尘箱收集灰尘,清洁前后对比的效果明显(图5)。

图5 光伏板清洁前后对比
4 结语
本文围绕荒漠化地区光伏板的清洁维护,针对斜滑面、自主行走清洁、缺水、抗风沙等要求,介绍了一种基于负压吸附原理的便携式无轨干式清洁机器人的结构设计。该机器人的4组双刷清洁部件由单片机控制受步进电机驱动,在提供大倾角(30°~45°)光伏板上运动动力的同时,配合负压腔构成“三合一”清洁;对称的结构设计使得能进行四方向的运动和整列光伏板的清洁无死角;通过加装的传感器和内置算法,克服自主定位初始位置、自动寻边、纠偏、加减速和跨板越障等难点,实现自适应轨迹规划功能。该机器人体积小重量轻,适用于集中式大型电厂,在分布式小型电厂中更具优势,能有效降低光伏发电厂中光伏板的清洁成本;元部件的快拆设计利于降低维护成本和迭代难度,也便于拓展应用。
