无人机航测技术在土地外业调查中的运用
2022-03-23朱晓静
朱晓静
(上海泓源建筑工程科技股份有限公司)
1 引言
无人机航测技术在卫星遥感、大飞机遥感之后逐渐兴起,作为一种新型航空遥感手段,其测绘成果影像分辨率高、高效便捷、成图迅速、成本低廉、可快速响应、机动灵活、精度高,逐渐成为测绘行业中的一种强有力的测绘手段[1]。
土地调查作为地籍测绘类项目,其数据基础在国家二调数据库及现状调查图斑数据库基础上进行更新,调查工作主要有全国年度土地变更调查与遥感监测、全市土地利用现状变更调查、其他各项专题或项目的土地调查等。土地外业调查项目传统测量方式为人工外业测量方式,后续内业处理绘制成图。针对大面积土地外业调查项目,传统外业测量方式周期长、成本高,后期成图依靠人眼交互识别大量照片并匹配判定土地编码,工作效率低且准确率不高,无人机航测技术的使用大大缩短了工期,提高数据准确率,为土地外业调查的便利实施带来质的提高。
2 无人机航测技术
无人机属于一种较为小型的轻便遥控飞行器,将其应用到测绘中,在无人机上搭载分辨率较高的摄影专用镜头,然后应用GNSS 导向或现场遥控的方式对飞行器飞行路线、飞行速度等进行控制,使之能够在飞行过程中通过摄影拍摄到所需数据。在飞行结束后,利用专门的数据处理软件,将拍摄获得的影像转化为所需要的数据信息[2-3]。
无人机航测技术作为新兴高新技术,其优势主要有起降条件限制小,机身小巧便利、环境适应性强,操作简单、安全性高,分辨率高、数据精确,经济实惠、成本低[4]。
3 无人机航测工作流程(见图1)
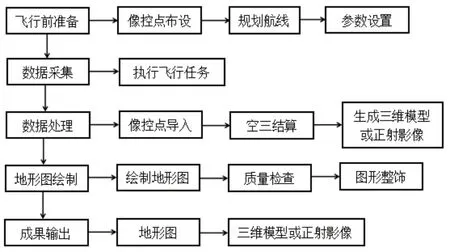
图1 无人机航测工作流程图
3.1 飞行前工作准备
飞机飞行前对天气环境有一定要求,尽量选择在天气晴好的开阔地、小于五级风的环境下进行飞行,以提高飞行质量。起飞前检查飞机各部件工作状态良好,确保遥控器及智能飞行电池电量充足,以便能顺利完成飞行任务。
飞行前准备工作主要包括像控点布设、规划航线、飞行参数设置等。根据前期踏勘或搜集到的测区情况合理布设像控点,采用GNSS RTK 或全站仪等设备对像控点进行实地采集坐标数据。起飞前进行航线规划[5],针对项目需求采集正射影像或三维立体影像资料,规划相应航线,设置飞机参数。
3.2 低空摄影数据采集
飞机在适宜的环境下进行低空摄影数据采集,飞行高度不大于120m。飞机按照规定的航线采集数据并返航,完成飞行任务。
3.3 内业数据处理
利用专业数据处理软件对航测采集到的数据进行数据处理,设置坐标系统,导入像控点,进行空三计算,符合精度要求后提交生成正射影像图或三维模型。检查影像精度符合要求后,利用绘图软件进行地形图描绘,绘制所需地形图。
4 项目应用
4.1 项目概况及背景
本项目属于土地调查项目中的复垦项目,所谓土地复垦是指对生产建设或自然灾害造成破坏、废弃的土地进行整治,恢复利用的活动。项目主要是摸清土地范围内地类、位置、面积、分布等状况,提供准确清晰的现势数据,对各地类判别准确无误,影像资料清晰可辨。项目要求测量精度指标见表1。
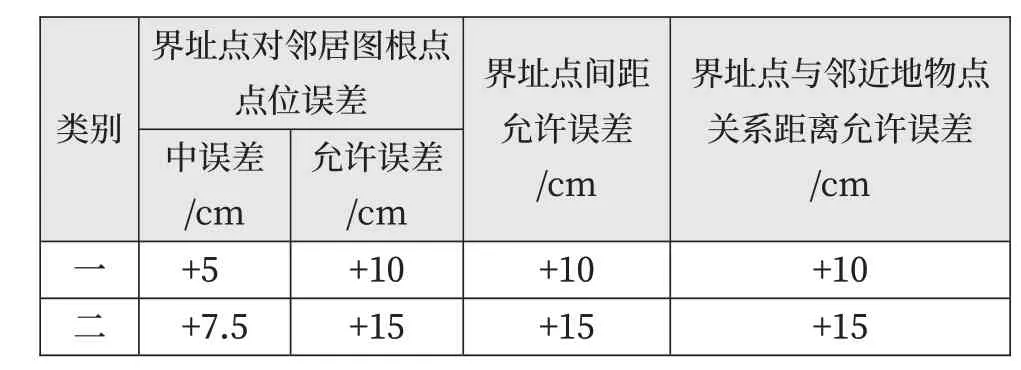
表1 界址点精度指标
项目位于城市郊区,分布较大面积耕地、农村居民地及工业低层厂房,视野较为开阔,面积约7km2。前期对测区采用传统测量方式进行,即GNSS RTK或全站仪测量方式对测区不同地类边界进行量测,同时进行拍照取证,后期内业人工判别地类绘制成图,项目内外业历时大约25d,质量检查15d。由于地域范围广照片量大,检查过程中发现地类判定多处出现误判情况,图中边界线部分区域也未能与照片相一致,最后导致部分测区返工作业。针对此问题,考虑使用无人机航测技术对项目工作方法进行改进,尝试部分区域(约0.9km2)进行无人机航摄飞行,利用倾斜摄影技术进行数据处理并成图。
4.2 无人机数据采集
项目采用大疆精灵4RTK无人机,该无人机可提供实时厘米级定位数据,支持PPK后处理,通过实时网络服务解算出高精度位置信息,是一款具备高精度测绘功能的航拍飞行器。无人机飞行区域约0.9km2,视野良好,飞行时天气良好,微风2-3级。飞行前对无人机进行设置,摄影测量2D,飞行高度100m,飞行速度7m/s,航拍模式为定时拍摄,完成拍摄返航,点击高程优化,任务相对高度0;相机设置照片比例为4:3,照片分辨率为4864×3648;关闭畸变修正;重叠率设置70/80。
根据测区情况及项目精度要求,本次布设像控点21 个,间距200m~300m,平均分布整个测区,选用明显固定地物角点处或固定专用相控布进行实地布设,并对布设的像控点进行取证记录。现场测量方法采用GNSS RTK施测,每个点位两次数据采集,两次读数较差在2cm内。
起飞前进行航线规划,将飞机联网后选择规划方式,进入遥控器内置地图界面,在地图上选择测区飞行范围,飞机自动规划任务航线,共规划一条航线,航线呈“井”字形。此次无人机顺利执行飞行任务,共拍摄张照片2124张。
4.3 数据处理
将飞行采集到的影像资料导入Context Capture数据处理软件中[6],进行初始化快速检测,初步检查影像资料质量情况良好,剔除少量影像。设置坐标系,导入像控点,找到航带上相应影像图上的像控点进行像片刺点,逐点进行。然后提交空三加密计算及优化。空三计算符合精度后,开始提交重建项目,选择空间框架进行切块,保留有效部分,之后运行生成三维模型。
由于影像数量较大,利用Context Capture 软件处理的优点是可以支持多台电脑联机处理,提高软件处理能力,有效节约时间。缺点是利用软件Con‐text Capture 进行空三解算时可能会出现失败的情况,采用的处理方法为匹配相机参数。飞机飞行时,关闭畸变矫正功能,照片中会有相机参数相关值。根据相机参数相关值计算每台飞机的相机参数,即相机的内方位元素和相应畸变参数。在编辑相机型号中输入相机参数,再进行空三结算,可有效提高结算成功率。另外,如果利用软件Context Capture 结算失败,可更换用其他软件进行结算。尤其是影像数量不是太大时,利用软件Agisoft PhotoScan 进行空三解算,功能强大,成功率较高,解算后生成的正射影像或倾斜影像分辨率也较高。
对生成的三维立体图进行检查,是否存在分层、变形、缺失等情况,确认成果可用后进入下一步工序,否则应剔除问题数据部分,重新进行数据处理,至图形或模型符合要求。如发现数据缺失严重,则返工重新执行飞行任务。
成功生成模型后,利用AutoCAD10.1 加载已生成的三维模型进行地类边界描绘,并根据《全国土地分类(试行)》的地类分类标准,进行人眼判别立体图中实景地类,绘制成项目所需的1:500地形边界图。
4.4 精度检查
本次实验数据处理工作完成后,为检验成果精度情况,依据《测绘成果质量检查与验收》(GB/T 2456-2009)规定,同时根据本项目的特点,主要针对像控点进行平面中误差检核计算。随机在试测范围内抽检6 个像控点,与利用GPS RTK 方式采集到的数据进行比对检核,平面点位平均中误差为2.4cm,精度检查统计[7]如表2所示。

表2 像控点平面精度检查统计表
利用AutoCAD打开本次绘制的地形图,同时加载前期以传统方式测绘出的地形图进行数据比对,图形吻合度较高。选取项目初期以传统方式测绘的16个明显界址点,作为检查点进行平面精度检查,平面距离中误差最小0.7cm,最大为3.2cm,平均中误差为2.6cm,满足相关规范要求。
5 结语
项目试飞范围(0.9km2)利用无人机航测技术,四五天时间完成了作业成图及检查工作,如将人员、无人机交叉作业,十五天时间可完成全区7km2的测绘任务,大大节约时间,减少资源投入,尤其在后期检查过程中清晰易判,省时省力,使项目的质量更有把控性,后期可大力推广应用到此类项目中。
无人机航测技术成熟完善,自动化程度高,快捷高效,通过本次实验良好地验证了无人机航测技术在土地调查项目中的应用,方法的改进是一次较大的飞跃,未来在行业中的应用将更为广阔。
