山特维克MB670型掘锚机履带动态接地压力分析
2022-03-23李伟东段金红李宣东邵常雄刘占明梁志杰马学京陈洪月张德生
李伟东,段金红,李宣东,邵常雄,刘占明,梁志杰,马学京,陈洪月,张德生
1华能煤炭技术研究有限公司 北京 100071
2扎赉诺尔煤业有限责任公司 内蒙古满洲里 021412
3华亭煤业集团有限责任公司 甘肃平凉 744199
4华能庆阳煤电有限责任公司 甘肃庆阳 745002
5华能云南滇东能源有限责任公司 云南曲靖 655508
6华能煤业有限公司陕西矿业分公司 陕西西安 710032
7华能煤业有限公司 北京 100036
8辽宁工程技术大学机械工程学院 辽宁阜新 123000
9天地科技股份有限公司 北京 100013
履带由于其高通过性、高适应性等特点而广泛应用于掘锚机等矿山工程车辆。掘锚机质量可达上百吨,虽然履带式行走机构降低了掘锚机的平均接地比压,但巷道施工时设备为运动状态,掘锚机重心位置及接地条件不断变化,导致掘锚机接地压力分布改变,进而影响掘锚机的通过性和适应性,因此需要快速有效预测掘锚机运动过程中的接地压力。
随着计算机技术的发展,国内外专家学者开始借助计算机仿真技术研究履带车辆的地面力学问题。美国密西根大学的马正东等人[1]为捕获履带轮与地形交互的高频内容,且能够更准确地描述车辆在崎岖地形上行驶时多节距轨道的力学特性,运用超单元法,对负重轮-履带-地面的动态仿真进行了深入研究,提出了一种自适应网格划分的新型求解方法。贵州大学的张燕等人[2]针对运动过程中履带及承重轮位置改变造成的脱轮问题,建立了履带车辆虚拟样机模型,利用多体动力学软件 R ecurDyn 对履带车辆高速运动进行了仿真分析。湖南农业大学的郭凯文等人[3]为提升农用履带车辆在丘陵地带的地质适应性,对某小型农用履带车辆在定型农业路况下的运动过程进行了仿真与分析,得到了其运动规律。为了解履带式矿用挖装机承重轮在不同底板上的受载情况,张新等人[4]利用多体动力学软件对履带式矿用挖装机单边转向作业进行了仿真分析。笔者在上述研究基础上,采用多软件协同仿真技术,构建了掘锚机行驶动力学模型,分析了掘锚机工作过程中履带与底板间的接地压力变化情况,研究结果为掘锚机工作参数和履带结构参数优化提供依据。
1 DEM-MBD 耦合空间模型
1.1 掘锚机动力学模型
以山特维克 MB670 型掘锚机为研究对象。该掘锚机采用滑架式掏槽,在机身不动的情况下掏槽深度最大可达 1 m,实现了掘、支平行作业,顶、帮锚杆及锚索支护全部一次到位,整机结构如图 1 所示。
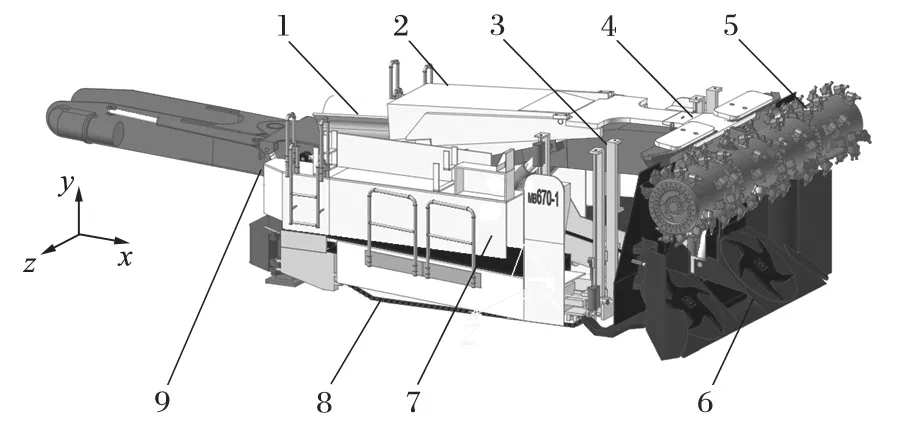
图1 履带式掘锚机模型Fig.1 Model of tracked bolt miner
1.2 底板颗粒床模型
该型号掘锚机适用于平直巷道的掘进,因此主要针对水平煤质底板作动态仿真分析。结合煤层地质调查结果[5],在 EDEM 中设置颗粒床填充底板参数,如表 1、2 所列。
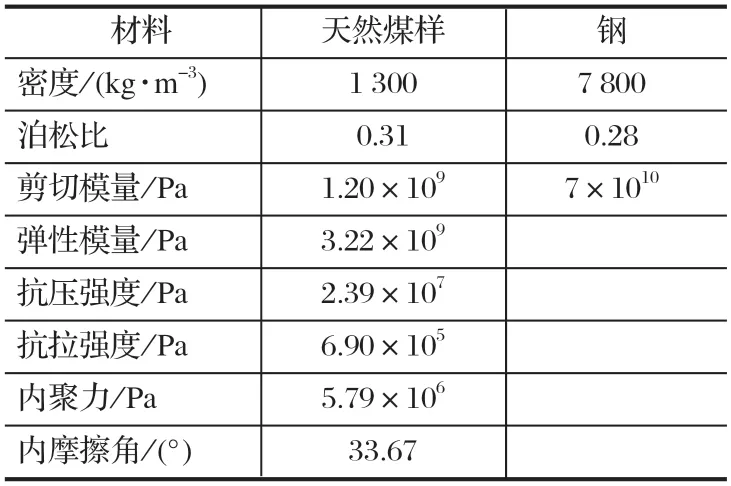
表1 材料物理及力学参数Tab.1 Physical and mechanical parameters of material
2 掘锚机耦合参数设置
2.1 履带运动参数设置
为模拟掘锚机前进动作,设置链轮角速度驱动函数为 s tep (t ime,0,0,1.5,1.194 3),即初始时刻角速度为 0,1.5 s 后链轮的角速度增加到 1.194 3 rad/s,换算成履带线速度为 0.25 m/s,即掘锚机最大运行速度。履带动力学模型如图 2 所示。
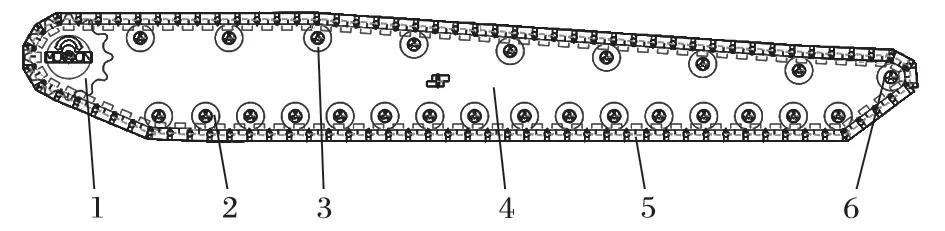
图2 履带动力学模型Fig.2 Dynamic model of track
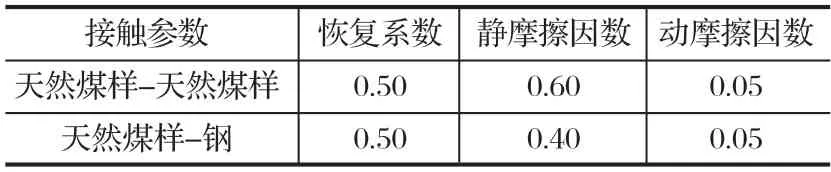
表2 材料间接触参数Tab.2 Material contact parameters
2.2 黏结参数设置
为模拟底板煤岩之间的黏结状态,需要在 EDEM前处理阶段选择 Hertz-Mindlin with bonding 模型,该模型可使煤岩黏结体承受一定的法向力、切向力和力矩。只有当黏结体受到的外力超过黏结键强度时,煤岩颗粒才能恢复自由运动状态。底板黏结参数如表 3所列。

表3 颗粒黏结参数Tab.3 Grain bonding parameters
3 仿真结果分析
3.1 底板受力变形
底板应力分布如图 3 所示。由图 3 可知,底板应力在履带运动过程中并不是均匀分布的。其中,纵向方面,应力在履带前端和中后位置下方较大,这是由于底板首次接触履带时受力变形,此时变形量最大,因此前端处底板应力较大,且向前进方向延伸;横向方面,应力大小随深度逐渐降低,且向履带两侧扩散,远离履带对称平面的应力越小。
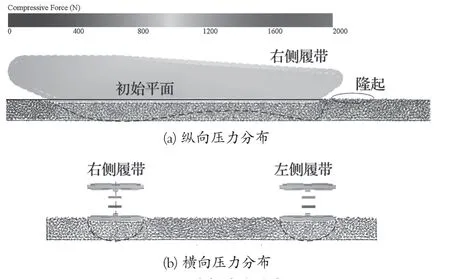
图3 底板应力分布Fig.3 Stress distribution of bottom plate
根据底板变形特点可将底板破坏分为 3 类。当履带下方底板发生较大压缩变形,车辆无明显滑动,履带接地周围土体无明显堆土时的破坏称为冲剪破坏;当底板破碎,履带两侧产生裙带现象,触土位置产生明显壅土时,此时底板发生整体剪切破坏;若履带作用导致底板内部产生破坏,底板内部颗粒运动导致表面有隆起现象,此时巷道底板发生局部剪切破坏。局部剪切破坏程度介于冲剪破坏和整体剪切破坏之间,如图 3 所示。观察底板变形情况可以看出,底板部分表面隆起高度最高为 10 mm,履带下的底板在履带挤压下沉陷,最大沉陷深度约为 20 mm。
3.2 履带接地压力
从上述分析可知,履带接地压力并不是均匀分布的。为获得行走时不同位置履带的压力值范围,可由监测同一履带板运动到不同位置处的压力大小实现。选取图 4 中 4 个不同位置处的履带板为分析对象,其中 48、49 号履带板在仿真时依次经过 1~ 8 号承重轮,31、32 号履带板经过 9~ 16 号承重轮。
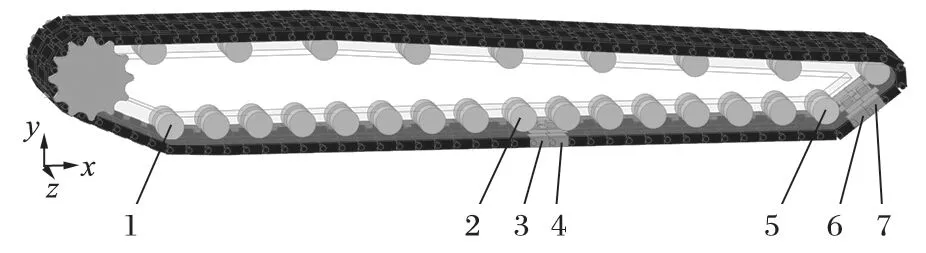
图4 检测位置示意Fig.4 Sketch of testing positions
图5 所示为履带板在不同接地位置处的压力曲线,结合履带运动过程,接地履带板在绕转到 1 号承重轮下方时,压力由 0 迅速增加至 20 kN,如图 5(a)中 0~ 2 s 间曲线变化所示。之后,履带板离开 1 号承重轮,履带垂直压力降低,并在到达 2 号承重轮时再度升高,之后履带板压力值呈波浪状循环往复,直到离开最后一个承重轮后压力再次降为 0,如图 5(b) 所示。图 5(b) 中初始时刻压力波动是由掘锚机下落撞击底板时的振动造成的,故压力数据应在稳定后读取。根据图 5 压力峰值可知,履带接地压力整体呈现中间高两头低的特点,履带最大接地压力为 27 kN,但由于 1 号承重轮的压土作用,该位置履带板接地压力较大,压力值接近 20 kN。2 号和 16 号承重轮下方履带板受压最小,底板应力也最低,接地压力约为 10 kN。
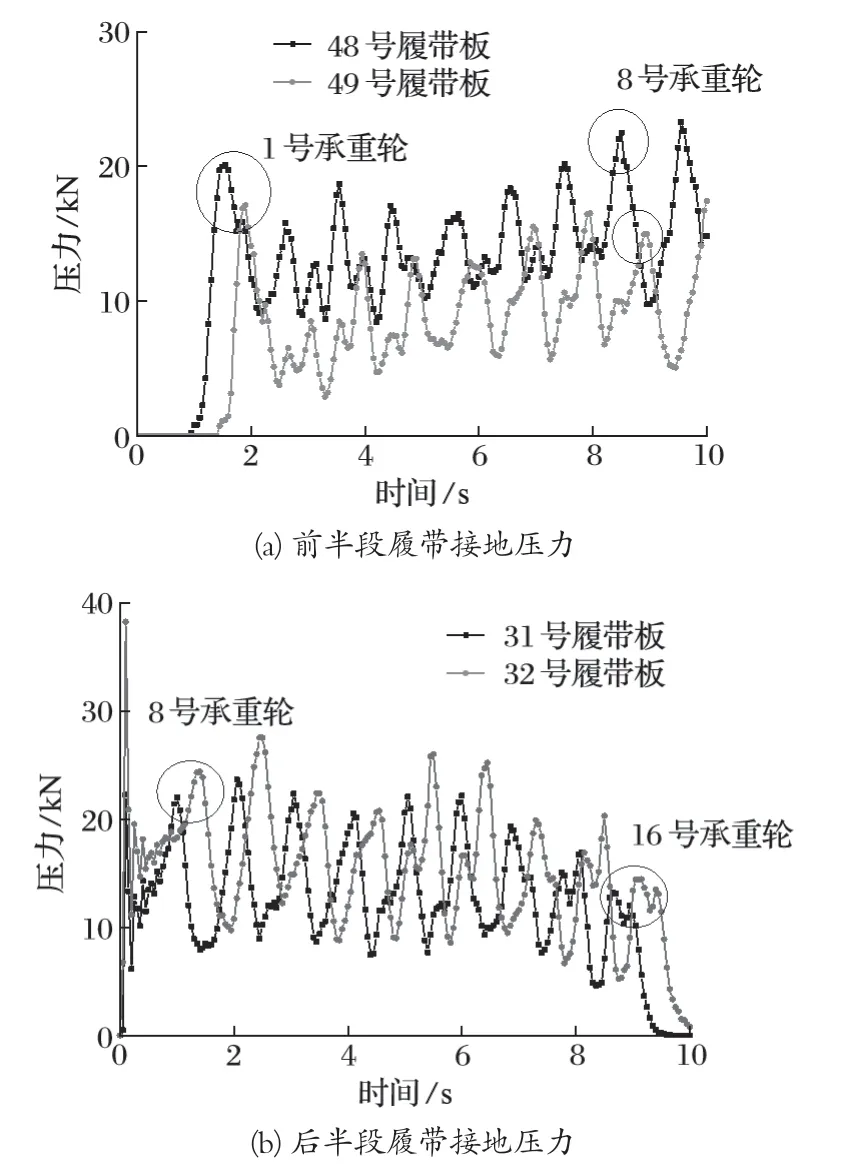
图5 履带接地压力Fig.5 Grounding pressure of track
4 结语
通过建立山特维克 MB670 型履带式掘锚机动力学模型,分析了掘锚机平地运动时的底板应力分布、底板变形和履带对地压力特点。通过分析,得出掘锚机行走时底板压力呈不均匀性分布,底板在履带反复挤压下发生局部剪切破坏,其中,履带前方发生隆起,履带下方产生沉陷。受承重轮分布影响,掘锚机对地压力呈现多峰值非均匀性分布,具体表现为承重轮下方履带板接地压力大,承重轮间履带板接地压力小,运动过程中山特维克 MB670 型掘锚机最大接地压力为 27 kN。
