一种基于层次模型的卫星故障动态仿真方法
2022-03-23王佳伟王晓晨郭永富高瑾博
王佳伟,王晓晨,郭永富,高瑾博
(北京空间飞行器总体设计部,北京 100094)
0 引言
随着在轨卫星数量不断增加,应用复杂度不断增高,故障发生数量增多,且故障现象更加复杂,针对卫星复杂故障的仿真面临巨大挑战,卫星在轨故障会造成卫星性能下降,功能丧失,给用户带来了巨大的损失,需要对故障进行快速、准确地处置。因此,精细化故障仿真成为卫星仿真系统建设过程中需要解决的关键问题。
目前,国内外卫星故障仿真方法以静态仿真为主。静态仿真方法是根据已明确的仿真故障预案,设置卫星遥测变化情况,仿真瞬时故障状态,能够在一定程度上仿真故障的发展过程,但缺乏对故障发生时,卫星各部分间关联时序变化的仿真,不利于对故障的实时处置和决策。
本文提出一种基于层次模型的卫星故障动态仿真方法,实现针对多层复杂故障的连续仿真,辅助用户识别故障过程中脆弱环节,结合处置策略,实时仿真故障处置情况。该方法能够在时序维度动态仿真故障状态及影响范围,为处置提供操作依据,为用户提供决策数据支撑。
1 动态故障仿真方法
卫星故障仿真是仿真领域研究的重要方向。卫星是由多个部件组成,相互联系且具有确定功能的整体。卫星系统发生故障时,组成系统的各个部件状态发生改变,仿真时不仅对部件当前故障状态进行仿真,而且需要根据各部件之间的“影响关系”对相关遥测变化进行仿真。
根据卫星在轨发生故障机理是否明确,可将故障分为4 类,典型故障如表1 所示。
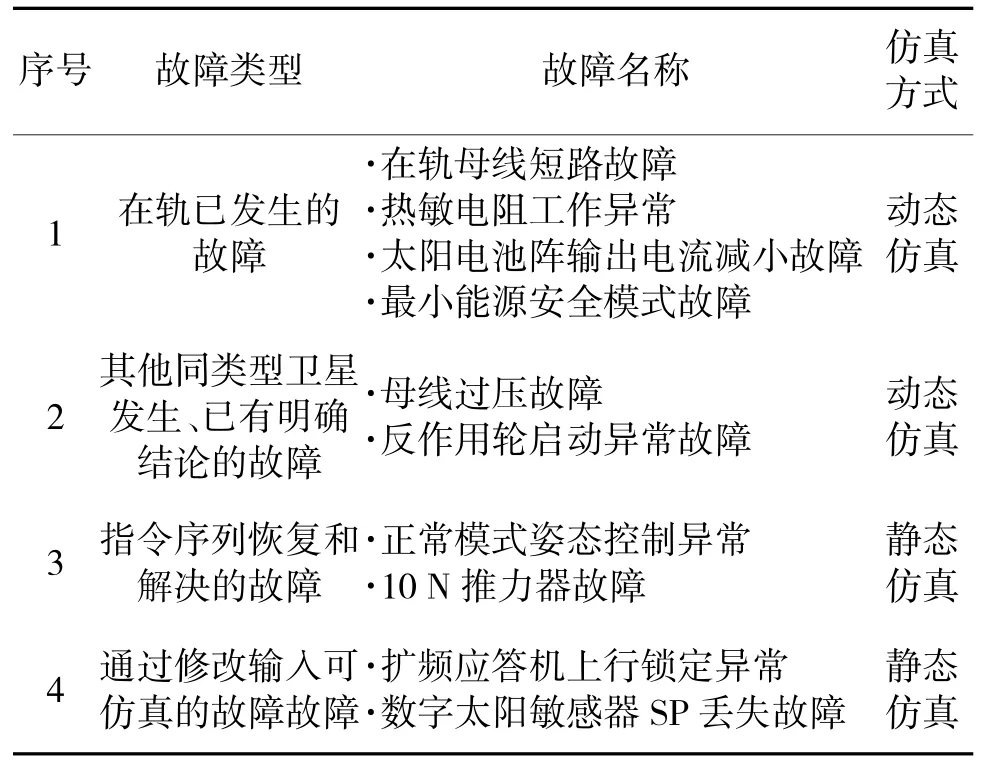
表1 卫星典型故障表
1)在轨已发生的并且有明确结论的故障;
2)其他同类型卫星发生的、已有明确结论的故障;
3)能够设计指令序列恢复和解决的故障;
4)通过修改输入(包括星上软件和外部激励信号等)可仿真的故障。
1.1 两种仿真方法对比
目前,故障仿真以静态仿真方法为主。静态仿真方法是根据已有故障预案或已明确原因的故障报告,对故障状态进行初始设置,实现单一、线性的故障状态。从系统某故障实例出发,找到与这次故障相关的遥测状态表,列出各部件在这次故障中的状态,仿真过程中对故障状态表进行列表式实现。静态仿真方法有针对性,仿真现象单一,没有对故障发生后,卫星状态的动态变化过程进行仿真。
卫星是由各部件组成,相互联系且具有确定功能的整体。在仿真应用中,用户更关注故障发生后卫星状态的时序变化过程和故障影响范围,为快速、准确地故障处置提供决策依据。两种故障仿真方法比较如图1 所示。
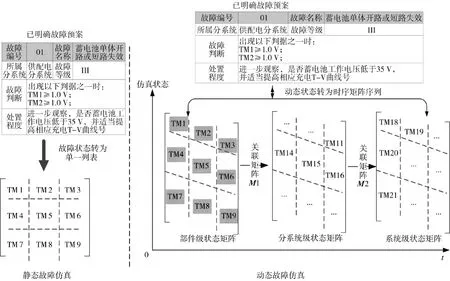
图1 故障仿真方法对比图
1)静态故障仿真构建的一般为部件级故障模型,仿真时进行反复单次仿真,未考虑故障演化过程,即没有实现分系统、系统级连续变化的精细仿真。层次故障动态仿真方法是在故障发生后,以部件级故障为仿真起点,建立分系统级、系统级故障状态的动态关联转换关系,逐级推进仿真;
2)本文重点研究卫星故障中不同层次的故障状态间的关联时域特性及动态转换仿真方法。故障状态变化过程中存在一系列事件,这些事件由故障涉及的部件和状态组成,可通过卫星遥测矩阵进行表示,并且这些事件是按照一定关联关系相互连接的,通过转换矩阵表示事件之间的关联关系。动态故障仿真方法是针对不同层次、不同等级故障状态的时域特征进行仿真。
1.2 动态故障仿真流程
在明确所仿真卫星故障的现象后,动态故障仿真流程如图2 所示。
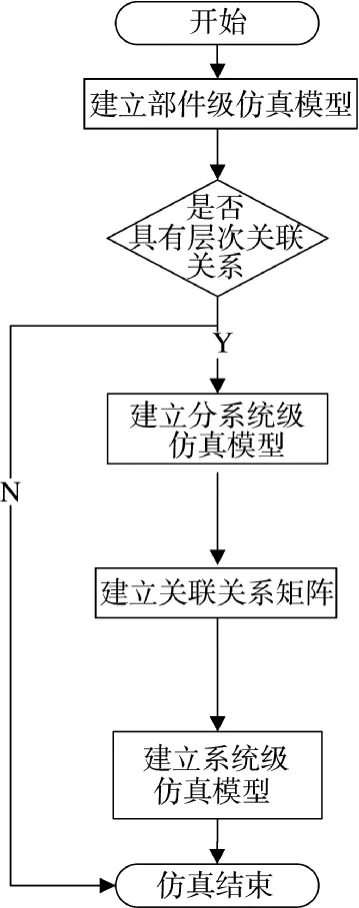
图2 动态故障仿真流程图
1)根据已明确的故障预案作为输入,建立部件级故障仿真模型,模型是由部件遥测参数组成的矩阵;
2)建立部件内各遥测关联关系模型,判断部件内故障是否影响分系统其他部件。若有影响,则建立动态关联矩阵;
3)根据分系统构成关系,建立分系统故障状态矩阵,由部件故障矩阵和关联关系矩阵共同构成;
4)根据系统构成关系,建立系统故障状态矩阵,由分系统故障矩阵和关联关系矩阵共同构成。通过状态矩阵的运算推进仿真,直到仿真任务结束。
2 关键技术研究
2.1 层次故障建模
当前已有的卫星故障仿真模型多为单层部件级故障仿真模型,没有考虑故障发生后状态时序变化过程,无法完整、真实地反映故障信息。卫星各分系统部件之间有着电气、机械、热连接,同时会进行信息交互,故障部件会对分系统内其他设备的正常工作造成影响。一般情况下,故障首先出现在某单项设备上,称为部件级故障,这类故障通常不会给卫星带来严重后果。但如果这种故障不能及时切除,将会扩散并迫使分系统发生多重故障,可能会引起整星的故障。
卫星组成可划分为部件级、分系统级和系统级。按照故障发生时的状态及影响范围,故障演化的时序过程可划分为部件级故障、分系统级故障和系统级故障。根据仿真故障的时域演化过程,分别建立层次故障模型,同时对故障时序发展路径进行分析,建立不同层级故障演化的时序转换矩阵,形成动态故障仿真方法。每一层级的故障对应一个故障状态模型,如图3 所示。
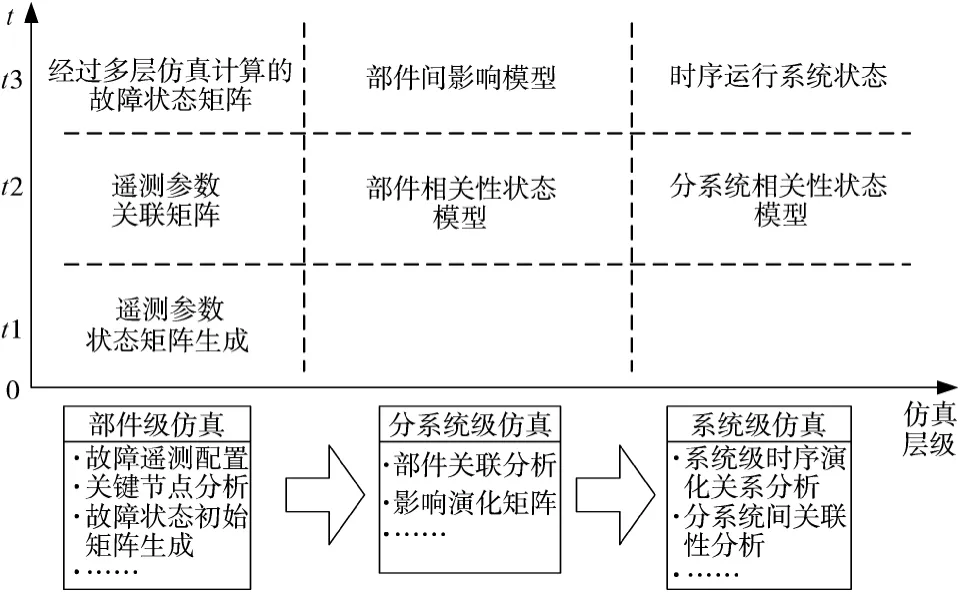
图3 层次故障建模方法示意图
1)部件级故障状态模型建立
*将卫星部件遥测状态设置为正常状态、故障状态两种,提取可以描述部件的工作状态特征值,形成故障仿真的特征向量;
*根据特征向量建立故障状态配置集合,特征向量由部件遥测矩阵组成。
2)分系统级故障状态模型建立
*分系统级模型描述的是分系统内各部件之间关联关系特征,通过预先配置部件关联特征量构件仿真转换矩阵,形成转变过程中的仿真推进过程;
*部件故障状态矩阵与转换矩阵相乘,得到当前分系统故障状态模型。
3)系统级故障状态模型建立
*系统由各分系统组成,系统的关联矩阵根据经验知识进行预先配置;
*根据用户提出的仿真任务,可修改系统关联矩阵中的关联值。故障状态矩阵与转换矩阵相乘,得到最终卫星故障状态模型。
4)层次仿真推进过程
*当部件级故障状态模型建立完成后,判定当前时间参量是否满足进入分系统级故障仿真的条件。若满足则进入分系统级故障仿真层,否则直接进行单一层级故障仿真;
*判定当前时间参量是否满足进入系统级故障仿真的条件。若满足则进入系统级故障仿真层,将系统转换矩阵反馈至故障状态仿真矩阵,形成最终仿真。
2.2 动态仿真推进
卫星故障仿真过程中,不同层次之间的推进仿真,通过微分动力学模型实现,时序动态过程与微分动力学方程对应。故障状态在不同层级之间的推进仿真关系,以遥测节点与遥测节点之间的一对一、一对多或者多对多的映射形式表示。因此,在确定了层级间相互关系后,可以将故障仿真过程视为3 个层级仿真过程的叠加。
假定部件仿真状态A和分系统仿真状态B之间存在着故障演化的动态关联关系。在A到B的故障推进仿真中,将A中的遥测点与B中有关联关系的遥测点连接,所构成的状态矩阵记为C。将时序动态故障仿真过程看作仿真状态矩阵A、仿真状态矩阵B 以及C 的仿真过程叠加。动态故障仿真方法如图4 所示。
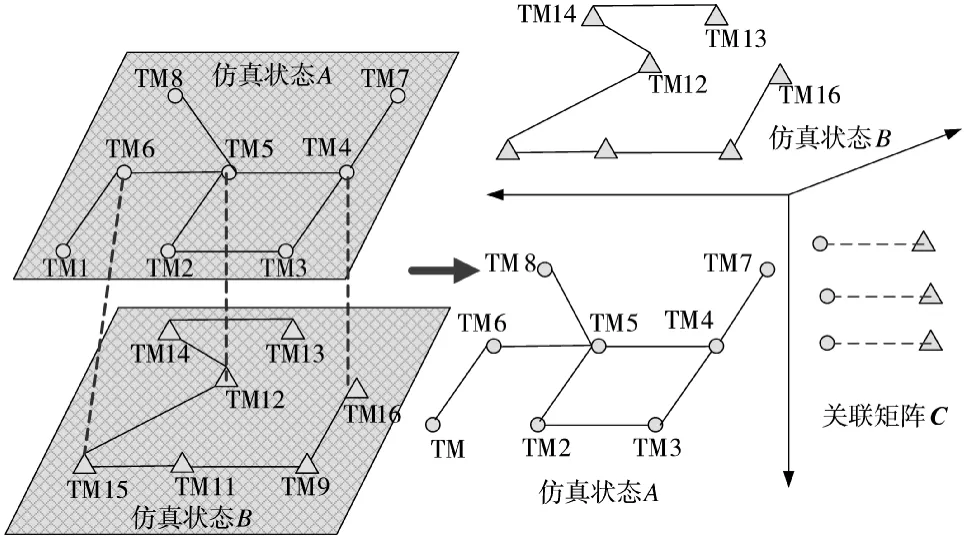
图4 动态仿真推进方法图
1)首先对仿真状态矩阵A、仿真状态矩阵B 进行建模。构造故障状态矩阵A、仿真状态矩阵A 的遥测节点状态变化函数。故障状态矩阵是由遥测当前状态及其相互关联关系构成,每个节点与一个遥测参数相对应。部件级故障状态A表示为[1]:

部件级故障状态B表示为[1]:

其中,ms,i(t),s∈{A,B}表示故障状态矩阵S 中第i个遥测节点的状态函数,qsij(t)表示影响故障矩阵S中第i个遥测节点的第j个因子。Fs,i(qsij(t))为将故障仿真过程中相互作用的影响因子集合映射至遥测节点状态的映射函数。
2)推进时序仿真时,通过仿真状态A和仿真状态B之间的遥测节点相互作用关系函数建立仿真模型,利用微分方程解的性质来构建不同层级之间的仿真推进过程。从仿真状态A到仿真状态B的转化过程表示为[3]:
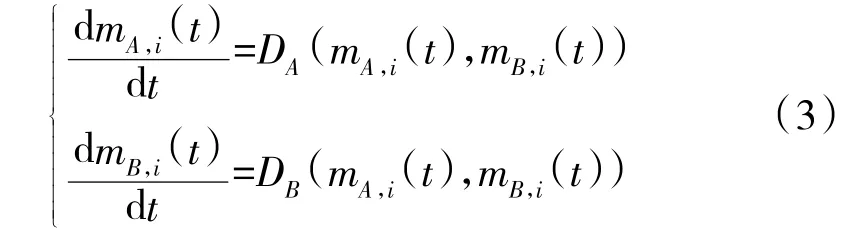
3)在基于相互关联状态矩阵的故障推进模型中,不同层级状态矩阵中的节点与节点之间的关系一般进行简化为一对一关系。即当仿真状态A中的遥测节点发生故障的时候,B对应的遥测节点以概率e发生故障。通过微分方程组的参数来反映仿真推进过程中一对一或者其他的关系和对应于该关系产生的影响。
4)在单一部件基础上,定义卫星所有部件级故障状态矩阵之和为SA,i(t)=Σi FA,i(t),所有分系统级故障状态之和为SB,i(t)=Σi FB,i(t)。通过概率交叉项系数e体现两个层级之间互相影响关系。其中,e11,e22表示仿真层级内部推演概率,e12,e21表示仿真层级之间推演概率。卫星从部件级故障到分系统级故障仿真过程表示为[3]:

3 实例分析
本文以某卫星进入最小能源安全模式故障为实例,利用动态故障仿真方法对故障发生、演化及处置过程进行仿真。卫星入境后,对电源分系统V-T 曲线进行切换,由3# 曲线切换为2# 曲线。A组蓄电池由于放电电流大且T-V 控制电路处于曲线切换过程中,导致蓄电池由一阶段充电转二阶段充电,最终导致蓄电池充电电流小于5 A,且持续时间达到90 min,触发了进入自主应急管理条件,卫星进入最小能源模式。故障发展演化关系如图5所示。
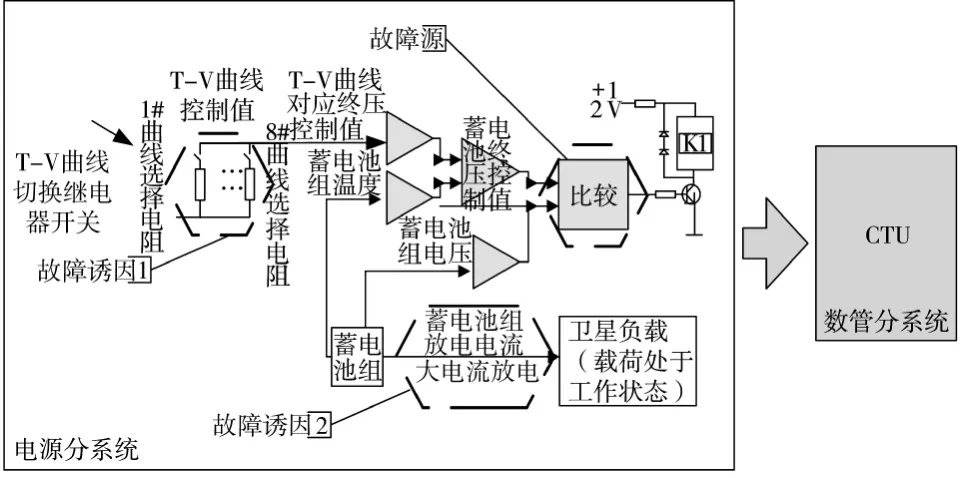
图5 某卫星故障发展演化关系图
卫星充电控制器发生故障后,导致蓄电池充电电流异常。同时故障传播到数管分系统,卫星进入最小能源模式。该故障是由部件充电控制器故障引发了一系列的相继性故障,导致电源分系统故障,最终引发卫星进入最小能源模式。整个故障过程的动态仿真时序关系如下页图6 所示。
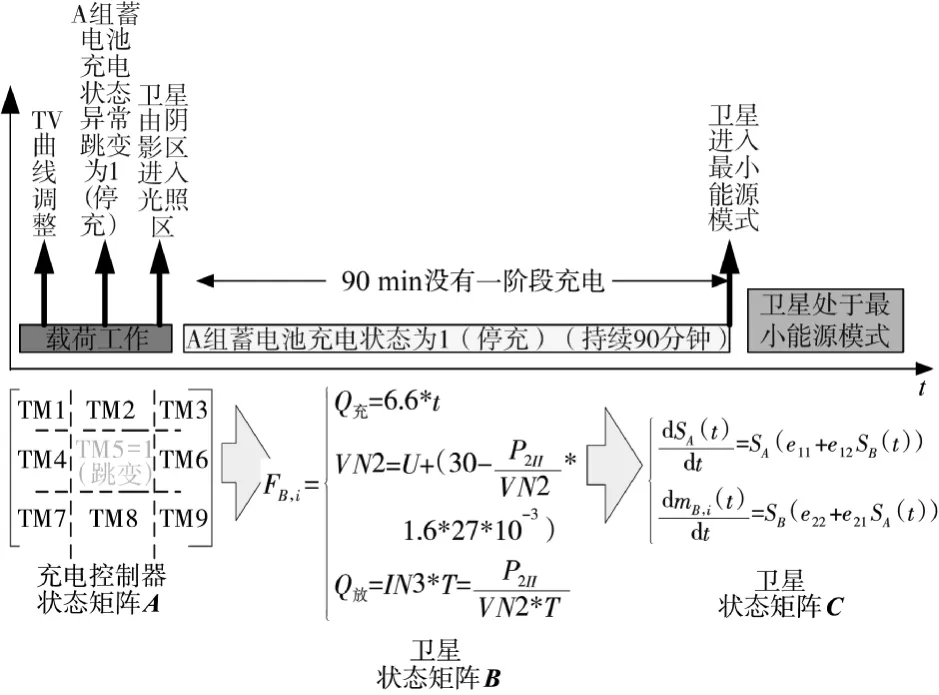
图6 故障仿真过程时序图
1)仿真t0时刻:卫星处于地影期,按照指令单,执行A 组蓄电池及B 组蓄电池T-V 曲线调整,指令发送完成后,T-V 曲线状态遥测显示正常,与判读准则一致,指令发送执行正确;此过程中卫星载荷处于工作状态。当前为仿真开始的初始状态,根据充电控制器各遥测参数初始值,设置状态矩阵
2)仿真t1时刻:卫星出境,A 组蓄电池T-V 曲线切换后,卫星由地影区进入光照区。A 蓄电池充电状态转入停充或二阶段充电状态,无法恢复一阶段充电,此为故障源。故障开始时,只出现在充电控制器中。根据故障现象,设置部件级故障状态矩阵
3)仿真t2时刻:充电控制器故障导致蓄电池充电电流小于5 A,且持续时间达到90 min。这段时间内,充电控制器故障已经影响到电源分系统其他部件,充电电流、蓄电池电压等遥测参数都出现异常变化。其中,仿真关联函数根据卫星电源分系统相关公式可表示为:FB,i=电源分系统级故障状态矩阵通过mB(t2)=FB,i*mA(t1)计算;
4)仿真t3时刻:部件故障影响范围已经扩大,导致卫星状态发生改变,载荷停止工作,卫星保持最小能源模式卫星有效载荷、GPS 接收机等设备处于关机状态。根据公式计算仿真推进过程中各状态值,形成仿真推演过程。
4 结论
本文从工程实现的角度,提出一种基于层次建模的动态故障推进仿真方法。将卫星故障过程划分为部件故障、分系统故障和系统故障不同层级,并设计了不同时域对应的仿真模型,通过微分动力学方程实现了故障多时域演化。该方法能够提高仿真的精确性,具有仿真度高、工程易于实现的优点,能够为故障处置人员提供参考依据。
本文方法只对部分卫星的典型故障进行了分析、建模,并未覆盖所有类型故障。因此,还需大量的建模工作,才能实现对所有平台卫星故障演化过程的仿真。此外,本文中的仿真推进方法是对卫星各部件之间的关联进行了简化处理,后续要针对部件间真实复杂关联关系进行建模分析,不断提高仿真的真实性。