保护性耕作农机作业监测技术现状
2022-03-21王立新胡显威
王立新, 胡显威
(新疆职业大学机械电子工程学院,新疆 乌鲁木齐 830013)
0 引言
保护性耕作可促进生态、经济和社会各项事业协调发展,也是目前保护黑土地最经济有效与现实可行的举措。经过多年的研究开发,现已大面积推广应用于世界各地,重点推广秸秆覆盖还田和免(少)耕播种。在组织实施上,特别提出要加强监督考评,鼓励各地积极应用信息化手段,有效提升监管服务,提高监管精准度。
采用信息化手段监管农机作业能够实现作业计划、质量、面积的管理、统计和分析,确保作业质量要求落实到位、作业补助资金使用安全,大幅降低作业监管成本。监测播种前秸秆是否有效覆盖,实现生态效益,是保护性耕作的必须条件,否则易导致黑土地流失;监测免耕播种作业质量是保护性耕作实现经济效益的关键方法,如果发生漏播、断种等情况则无法确保稳产丰产效果。监测作业合格面积是国家政策精准实施的必须手段,仅靠人工开展作业核查成本高、效果差、风险大。
为解决免耕播种机播种质量监测难、作业面积统计精度差等问题,很多学者开展了作业监测技术研究,主要集中在秸秆还田、免(少)耕播种机播种参数监测及机具作业面积监测[1]。本文对保护性耕作中采用的主要监测技术进行归纳和总结。
1 秸秆覆盖率监测
1.1 人工监测
采用人工“拉绳方法”。测量时,沿田间地块对角线铺设绳索,统计标记点上有秸秆的点数,将标记点总数除以统计数据,计算出秸秆覆盖率[2]。该种测定方法随机性大、效率低,达不到保护性耕作的农机作业技术要求。
1.2 图像监测
图像法利用人工拍摄、无人机航拍或卫星遥感图像等手段获取田间图像,经过图像处理算法对秸秆进行识别,再按照秸秆面积与总面积的比值,对秸秆覆盖率进行测算。该方法作业效率高,成为了秸秆覆盖率监测重点研究方向。DAUGHTRY C S T 等[3]通过光谱反射率区分秸秆和土地。王昌昆[4]利用室内光谱和卫星遥感技术,探明9 种应用广泛光谱指数对秸秆覆盖率计算性能的影响关系。苏艳波等[5]通过工业相机获取图像,利用最大类间方差法来自动选择阈值大小。
为了进一步提高秸秆覆盖率监测速度和满足商业化秸秆识别要求,李佳等[6]创新提出了一种融合快速傅里叶变换与支持向量机(fast Fourier transform + support vector machine,FFT+SVM)的秸秆覆盖度自动识别方法,在播种机正常作业中,该算法利用摄像头每2 min采集一次图像,在一块规则的地块采集至少10 幅图像,以这10 个以上测试点的平均秸秆覆盖率作为此块地的秸秆覆盖率测量值,其原图与标注图如图1 所示,秸秆识别效果如图2 所示。
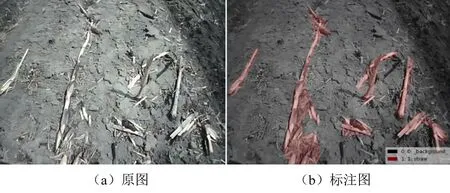
图1 秸秆识别对比Fig.1 Comparison of straw identification
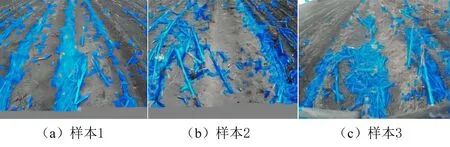
图2 秸秆识别效果Fig.2 Effect of straw identification
通过速度和精度两个方向对比文献[2]提出的人工拉绳法、文献[7]提出的人工神经网络法、文献[8]提出的自动阈值法、文献[6]提出的基于FFT+SVM 的算法等计算方法的效果,如表1 所示。人工拉绳法采用行列式均匀拉绳5 次,以秸秆覆盖的交叉点数与总交点总数的百分比作为秸秆覆盖率;人工神经网络法通过结合神经网络与纹理特征来提取秸秆求出秸秆覆盖率;图像智能分割算法通过最大类间方差确定分割阈值,提取秸秆的像素点和整个图像的像素点求出秸秆覆盖率。
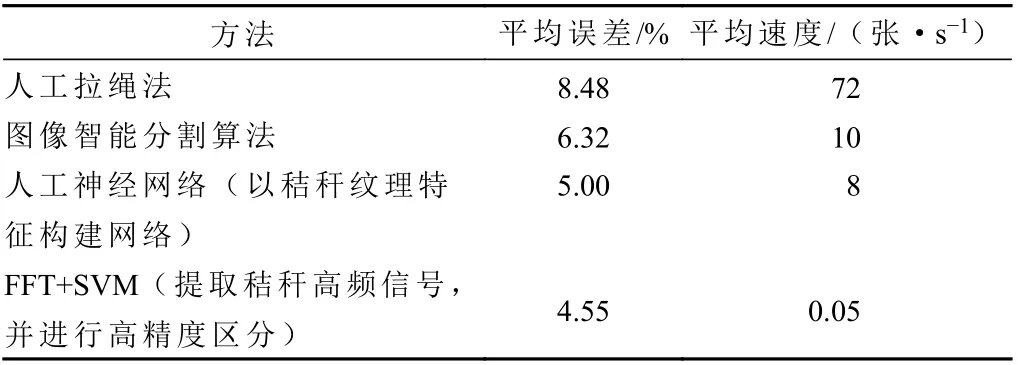
表1 秸秆覆盖计算方法性能比较Tab.1 Performance comparison of straw mulching calculation methods
2 免耕精量播种参数监测
免耕精量播种参数监测主要分为机械式、机电信号及电信号3 种。其中机械式运用简单的机械元件来完成监测播种机的故障状况;机电信号监测利用机械装置监测播种机,显示和报警均采用光电形式[9]。前两种是播种机异常情况下提示预警,但无法直接准确了解排种的工作过程,更不能分清故障发生的类型、正由于传感器技术不断应用到在农机装备领域,机械式与机电信号式监测技术已被淘汰,电子仪器式成为研究重点,投种过程中的监测技术是用传感器、高速摄像机等手段代替人监测种子流的状态[10]。目前电子监测系统主要有4 种方式:光电感应式、机器视觉式、电容感应式和压电感应式。
2.1 光电感应式
光电感应式通常利用光感应元件采集种粒对光线的遮挡信息,实现光信号向电信号转变,结构组成如图3所示[11-13]。
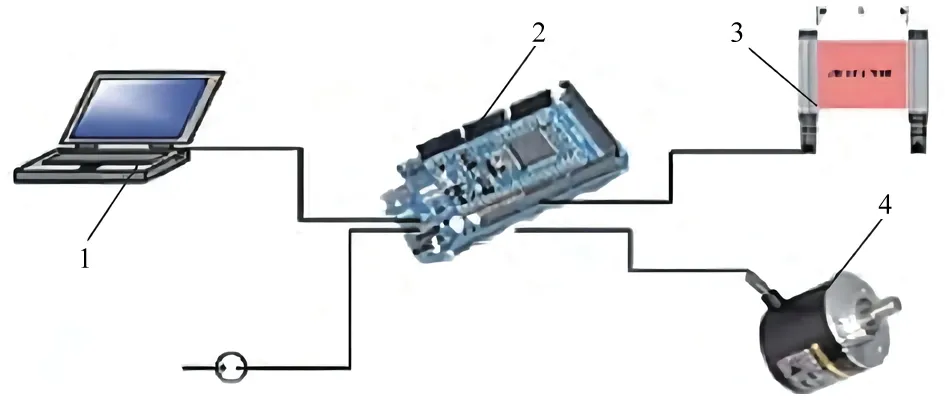
图3 光电监测系统方案Fig.3 Scheme of photoelectric monitoring system
2.2 机器视觉式
机器视觉式利用视觉相机对下落种粒进行高速摄像,通过图像处理将相邻种粒的像素间距转化为实际粒距参数,并通过与标准粒距进行对比,判定当前粒距是否属于漏播或重播范围,方案如图4 所示[14]。
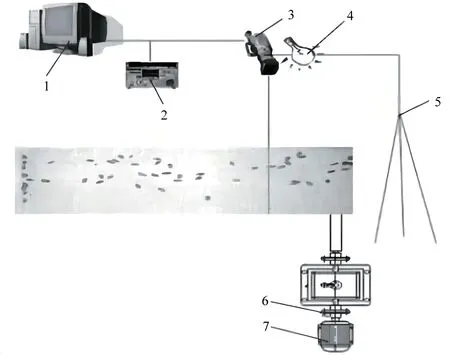
图4 机器视觉式监测系统Fig.4 Machine vision monitoring system
2.3 电容感应式
电容感应法通常在籽粒下落轨迹的两侧放置两块电容传感板,以建立籽粒质量与电容变化之间的线性关系,通过转换电路将电容变化量以高低电平信号即数字信号形式传输给单片机等控制单元,电容传感器结构如图5 所示[15]。
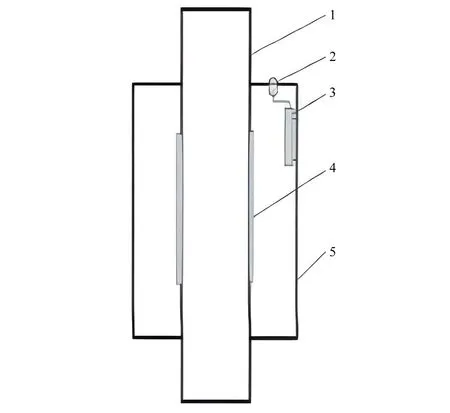
图5 电容传感器结构Fig.5 Structure of capacitive sensor
2.4 压电感应式
压电感应法采用压电薄膜等压力传感器感应种粒下落冲击力,实现压力值向电压脉冲信号转变,其监测系统硬件部分分为监测器和报警器,结构框图如图6 所示,监测器由PVDF 压电传感器、信号采集电路、霍尔测速传感器、无线发射装置与中央处理器构成[16-17]。
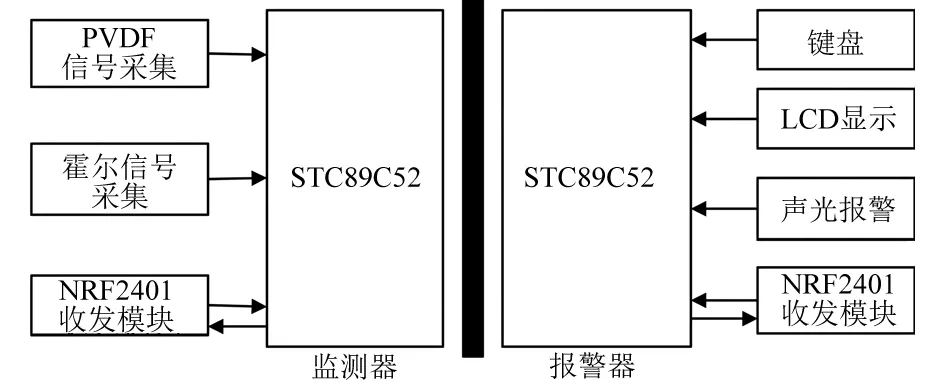
图6 系统结构Fig.6 System structure
综合对比以上4 种常用电子式排种监测方法,其优缺点对比如表2 所示。
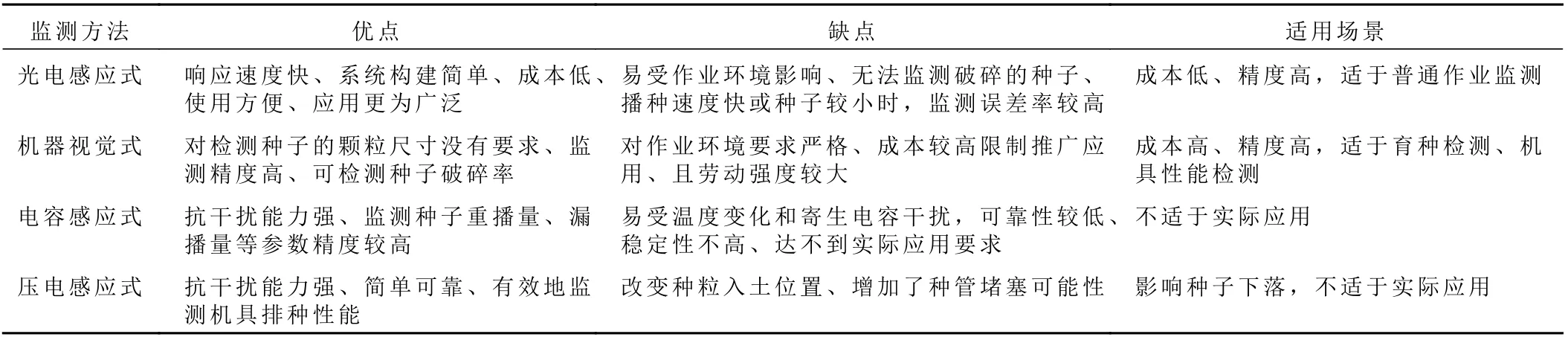
表2 常用电子式排种监测方法对比Tab.2 Comparison of commonly used electronic seed metering monitoring methods
3 机具作业面积监测
现有机具作业面积监测手段主要包括转速传感器与卫星导航系统,其中转速传感器通过安装在机具地轮上的转速传感器测转速,结合地轮直径计算作业速度,目前应用较多的是霍尔式转速传感器和增量式编码器[18-21]。卫星导航系统利用多普勒频移原理,获取机具作业位置,避免出现重复作业或未作业地块,可提高作业精度和作业效率[22-23]。
综合对比以上2 种常用机具作业面积监测方法,其优缺点对比如表3 所示,根据实际应用效果可以发现,基于转速传感器的监测技术广泛使用,然而卫星导航系统测速的同时兼有定位功能,适用于监管需要。

表3 常用机具作业面积监测方法对比Tab.3 Comparison of commonly used methods for monitoring working area of machine tools
4 典型保护性耕作监测设备
中国农业机械化科学研究院集团有限公司的保护性耕作监测设备如图7 所示,主要应用在吉林省,采用机器视觉识别技术与算法,结合专家知识,实现耕作田块秸秆覆盖率的识别;基于GIS 的多种作业统计AI 算法,作业数据计算分析的精确性、鲁棒性得到了提高;采用可弹性伸缩的分布式集群架构,设计了多种业务流策略保障平台高效可用,提升业务的敏捷和创新能力,保证平台实时数据接收与稳定性。

图7 中国农业机械化科学研究院集团有限公司的保护性耕作监测设备Fig.7 Conservation tillage monitoring equipment of Chinese Academy of Agricultural Mechanization Sciences Group Co., Ltd.
北京德邦大为科技股份有限公司研发的智能播种云监控系统如图8 所示,主要应用在黑龙江地区,具有作业数据监测功能,如漏播、重播和播种面积等。

图8 北京德邦大为科技股份有限公司的播种监测器Fig.8 Seeding monitor of Beijing Debon Dawei Technology Co., Ltd.
黑龙江惠达科技发展有限公司研制的HDGPCS600型播种监测器主要应用在黑龙江地区,可准确获取作业机具实时位置,区分机组行驶及作业状态,获知机具当前工作状态,如图9 所示。

图9 黑龙江惠达科技有限公司的播种监测器Fig.9 Sowing monitor of Heilongjiang Huida Technology Co., Ltd.
5 存在的问题
在推广应用过程中,保护性耕作电子监测系统应用机器视觉识别技术与基于GIS 的多种作业统计AI 算法,结合专家知识,实现耕作田块秸秆覆盖率的识别;基于可弹性伸缩的分布式集群架构,创新设计了多种业务流策略保障平台,提升业务的敏捷和创新能力,保证平台实时接入量与稳定性。该产品在用户口碑中获得了一致好评,但从具体实际应用情况发现,许多技术问题有待解决和改进。
(1)缺乏统一标准。各地区秸秆覆盖还田地表的方式不同,如粉碎覆盖、高留根茬秸秆覆盖、秸秆整秆覆盖还田等,标准不统一,系统兼容性差,致使电子监测系统识别各种作业方式难度较大。
(2)秸秆具有流动性。有些秸秆在播种前进行了归行处理,并且秸秆密度轻受风沙影响较大,存在被吹走或风沙覆盖的现象,致使其识别误差较大。
(3)夜间图像监测难度大。由于田间夜间光线较差,作业图像存在模糊和颜色灰白的问题,影响秸秆覆盖率的识别。
(4)播种作业窗口短,作业比较集中。当地移动网络数据的传输压力存在较大问题,导致作业数据不能及时上传。
6 展望与建议
6.1 展望
6.1.1 提高秸秆覆盖和播种作业监测准确性
目前保护性耕作农机作业装备已经应用于作业实践,在试验条件下有较高精度,在一般条件下数据也比较准确,可以作为农机作业管理和补贴核查依据。但由于秸秆与裸露地表颜色接近、田间环境复杂多变、在用机具电器化程度不一、机手操作水平差别大等原因,导致地表秸秆监测准确性下降甚至出现较大偏差。建议进一步研究田间秸秆覆盖率的快速实时、准确、普适的监测算法与设备,如智能手机+智能算法。
免(少)耕播种机播种参数监测技术由于相邻种粒重叠面积大、种子种类和形状等难以识别判定、工况条件复杂、干扰因素多发等原因,致使出现重播监测精度低、不规则小粒种子监测难度大、环境适应性差等问题。建议多传感器融合,优化系统构成和整体性能。
6.1.2 研发高可靠、低成本作业监测装备
现有监测系统在实验室条件下试验效果良好,并且性能指标远高于现有市场产品。但在农田非结构化环境下,强光、高温、潮湿、高尘、振动等外界不良因素均会对监测系统稳定性产生影响,尤其在大田作业工况下,时常发生误判、漏判、信号中断等问题,增加系统制造与人力成本。建议提高传感器性能,配置防护装置,优化探头性能,选用穿透力、抗干扰能力更强的传感器;需建立完善的产品试验检测平台,降低企业的研发费用、试制费用和田间测试费用,从而有效降低产品成本和提高作业监测装备质量。
6.1.3 发展多机兼容的作业监测装备体系
目前单机保护性耕作作业监测装备种类众多,应用比较广泛,但主要针对某一特定的保护性耕作农机作业机械和作业任务而开发的,而适用于可实现多类型作业任务和不同类型作业机械的监测系统并不多。未来农机监测专用仪器从单参数向多参数、实时、便携式方向发展;农机监测仪器设备的结构将由专用型向多用型发展;即插即用,按需配置,不断提高其通用化水平。
6.2 建议
6.2.1 开展作业监测
要加强组织领导,突出政府牵头,提供资金和人员保障。根据国家农机购置补贴政策,引导农户购买保护性耕作机具,增强机械作业的保障能力。希望政策支持具有长期连续性,在相关法律制定修改过程中,纳入保护性耕作内容,争取从法律层面保障其农机作业监测技术的精准实施[24]。
6.2.2 发展智能装备
政府大力支持共建保护性耕作科研平台,高性能保护性耕作核心监测元器件研发攻关,提高农业生产效率。如在国内地轮驱动仍然是主要甚至唯一的排种器驱动方式,建议在未来的研究中,加强对电驱和液压马达驱动排种技术的研究和应用,从排种器驱动方式上看,今后将向多种驱动方式并存的方向发展。
6.2.3 统筹建设农机作业大数据平台
现在国内各地区的农机作业信息管理系统复杂多样,无法实现数据共享与多地的联合统一调度,因此需对各地区信息管理平台与智能农机装备的接口进行标准化统一,统筹规划建立全国统一的农业机械化作业管理系统。
7 结束语
以免(少)耕播种、秸秆残茬管理等为核心的保护性耕作技术,提升保护性耕作配套机具的原始创新能力、集成创新能力和引进消化吸收再创新能力。保护性耕作农机作业监测系统国产化、低成本、智能化是未来的发展趋势,信息化将是推动农业机械效益增长的重要手段,提高农业产量、农民收入。
