基于模糊PI 控制的变量施药系统设计与试验
2022-03-21张成远朱立成王瑞雪郑永鑫贾晓峰徐庆忠
张成远, 朱立成, 王瑞雪, 马 明, 郑永鑫, 贾晓峰, 徐庆忠
(1.中国农业机械化科学研究院集团有限公司,北京 100083; 2.吉林省农业机械化管理中心,吉林 长春 130000;3.吉林省农业机械研究院,吉林 长春 130028)
0 引言
随着我国农业的迅速发展,农药施用量也在逐年增加,2020 年我国水稻、小麦、玉米3 大粮食作物农药利用率为40.6%,绝大部分农药都流失到环境中[1]。农药的长期不规范施用会造成作物对农药依赖性加强,流失到环境中的农药造成生态环境的破坏,农药残留量超标问题对人体产生危害,因此农药合理使用是粮食生产需要考虑的重要问题。当前施药多采用手动植保机械,此类机械作业效率低、安全隐患大,因此有必要开展植保机械的研究,进而提高农药利用率、减少农药污染、提高防治效果,是新形势下现代农业的必然要求[2-4]。
本文设计一种基于模糊PI 控制的变量喷药系统,可实时监测喷药机具的流量、压力、作业速度与液位信息等参数,并根据这些参数实时调整喷药量,从而实现合理施药。
1 总体结构设计
当前主流施药系统作业方式相对单一,无法实时调节喷头的开闭状态,因此对作业时行进速度的一致性要求相对较高,可能发生重喷及雾滴分布不均匀的现象[5-6]。在课题组自研喷药系统的基础上,结合当前的变量施药技术,本文设计一种主路节流的可控制多组喷头的变量喷药系统,如图1 所示。
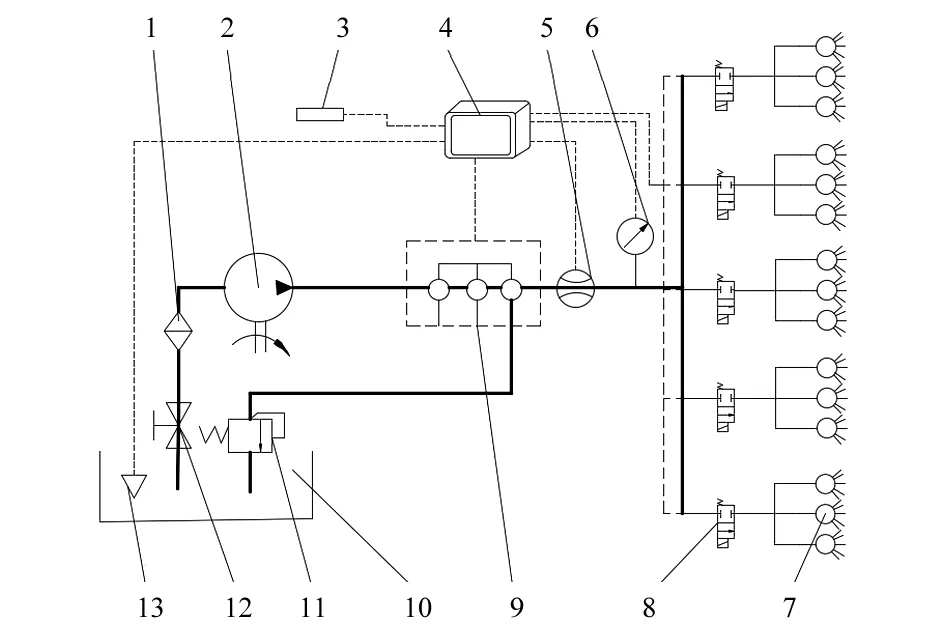
图1 变量施药系统组成与管路结构Fig.1 Composition and pipeline structure of variable spraying system
变量喷药阀组包含手动调节阀与比例电磁阀。药液在动力输出隔膜泵的作用下依次流经主阀、过滤器,此时高压药液经过手动调节阀发生第1 次稳压限流,当药液流经手动调压阀形成稳定压力的药液后,药液发生分流,一部分经溢流阀回流至药箱,另一部分流经比例电磁阀,发生第2 次稳压限流后依次经过流量传感器、压力传感器,最后输送到喷头。溢流阀安装在回流管路上,用于防止药液压力过高,保护喷药系统。流量传感器、压力传感器、北斗测速装置及液位报警装置实时监控整机系统工作参数并分别与变量喷药控制器相连。
本喷药系统是基于课题组自研悬挂式喷杆喷药机开发的,喷幅24 m,包含48 个雾化喷头。考虑到经济原因,该系统只采用5 组开闭电磁阀同时控制48 个喷头的开闭状态,5 组电磁阀分别控制9、10、10、10、9个喷头[7]。
2 控制系统设计
2.1 硬件部分
中央控制处理器选用STM32F429IGTb,主要功能是完成对喷雾机车速、流量、压力信号的处理与计算,对触摸显示屏、电控调节阀与5 组开关电磁阀进行驱动及控制算法运行。基于北斗导航系统测算整机实时位置与速度。选用监测范围为7.5~135 L/min 的涡轮电磁流量传感器,最大承压为6.3 MPa。采用静压投入式液位传感器,检测范围为1~10 m。选用电流型压力传感器,其检测范围为0~2.5 MPa。
变量施药系统中手动调压阀与电控调压阀分别对应手动与自动两种模式,其中电控调节阀为变量施药系统的主要调节元器件,控制器通过PWM 信号控制电机改变阀门开度从而改变药液回流量,进而实现变量喷药的目标[8-9]。变量施药系统控制原理如图2 所示。
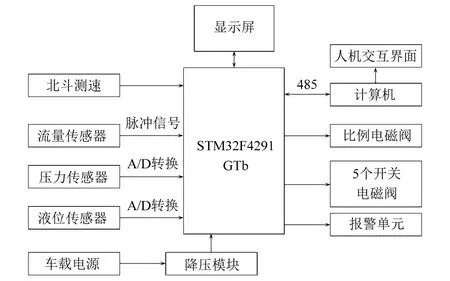
图2 变量施药系统控制原理Fig.2 Control principle of variable spraying system
2.2 主要参数检测
2.2.1 速度检测
速度检测是通过北斗卫星定位一定时间内机具行进距离差值计算行驶速度的。假设单位时间内北斗卫星检测到机具分别在A与B点,则喷药机速度v的计算公式为
式中C-A、B两点之间距离,km
t1-A、B两点采集时间间隔,h
R-地球半径,km,取6 378.134 km
因我国地理位置原因,故经纬度无须特殊处理。由式(1)确定的是A点到B点的平均速度,当t1趋近于0 时,则该平均速度可视为瞬时速度。距离差值由主控解读北斗GPRMC 报文中的经纬度信息获得。
2.2.2 流量检测
电磁流量计内部激励线圈在导电药液产生的激励电流作用下,输出感应电动势信号。经由其内部的信号放大变送器将感应电动势转换为连续的脉冲信号,计算公式为
式中q1-实际药液流量,L/min
n1-t2时间内检测到的脉冲数量
t2-脉冲采样时间间隔,s
K-仪表常数,取380脉冲/L
2.2.3 压力检测
主管路压力检测是将液体压力信号转化为电信号,通过一个滤波电路与AD 采集模块实现的,其计算公式为
式中p-压力检测值,MPa
D-AD 采样值,mA
I3-传感器模拟量输出下限,取4 mA
R-采样电阻,Ω
F-AD 采集模块精度,取12
P1-传感器测量上限,取2.5 MPa
2.2.4 液位测量
静压投入式液位计是基于目标药液静压与该液体高度成正比的原理,采用隔离型扩散硅的压阻效应,将静压转换为电信号。计算公式为
式中h-液位检测高度,mm
H1-传感器检测高度上限,mm
H2-传感器检测高度下限,mm
I1-传感器模拟量输出上限,mA
I2-传感器模拟量输出下限,mA
I-模拟量检测值,mA
该传感器主要为报警作用。
2.3 主程序设计
变量施药控制系统需要采集机具各项参数,使用模糊PI 调节实现流量控制、数据保存,并显示在速控触摸显示屏上,如图3 所示。
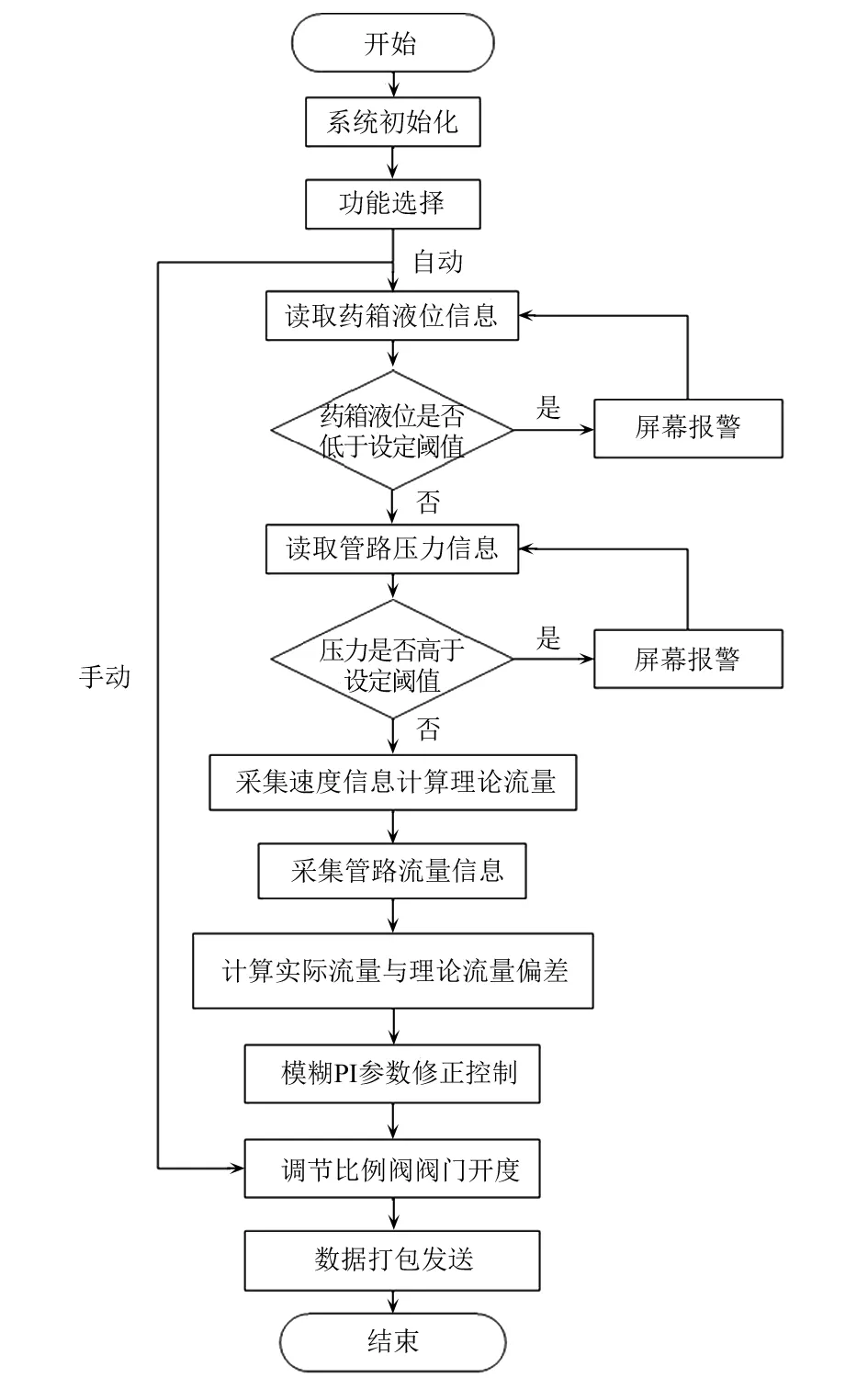
图3 喷药主程序流程Fig.3 Flow chart of main program of spraying
首先系统初始化,然后进行工作模式选择,如果选择手动模式则直接认为调控比例阀阀门开度。如果选择自动模式,则先后读取液位与管路压力信息,判断是否报警,不报警则进入下一步;采集速度信息计算理论流量,然后采集管路流量信息与理论流量作对比并计算二者偏差;将偏差与偏差的变化情况输入模糊PI控制器,通过控制器修正PI 的参数,继而控制电机调节比例电磁阀的阀门开度,最后将采集数据打包发送。
3 控制策略与仿真
3.1 控制策略
为了实现按需喷药的精确变量控制,流量控制阀的输出流量与阀的开口度和系统压力两个参数变量相关,3 者存在非线性关系。根据经验,变量喷药系统只需要PI 控制。本文采用模糊PI 控制算法作为变量喷药系统的控制算法,相较于传统PI 算法,模糊PI 控制具有调试难度低、鲁棒性强、抗干扰能力强的优势。
模糊PI 控制通过模糊算法设定PI 两个参数,这两个参数会随着外界的干扰进行自我调节,进而适应外界不断变化的环境,对系统的稳定起到关键的作用。
本系统是由触摸屏向系统输入作业速度、喷幅与喷药量后,控制器进行运算得出理论流量,与流量传感器采集的实时流量做差值运算得到二者的偏差,将该偏差作为系统输入量,通过模糊PI 控制运算得出控制量,对比电控调节阀的开度进行调节,改变药液回流量,从而实现实际喷药量与理论喷药量不断接近直到最后保持一致。已知喷头间距500 mm,理论喷药量与喷幅、喷头和作业速度的关系为
式中
q0-理论计算流量,L/min
Q-理论喷药量,L/亩,1 亩=1/15 hm2
v-机具作业速度,km/h
D-作业喷幅,m
N-作业喷幅内喷头关闭数量
由于变量喷药部分一般不需要微分环节,因此在模糊PI 控制中只需要对KP、TI进行模糊化设计,模糊PI变量喷药系统原理如图4 所示。
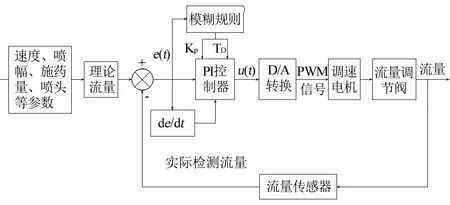
图4 变量喷药部分系统PI 控制原理Fig.4 PI control principle of variable spraying part system
变量喷药部分采集参数众多,并且大部分传感器数据需要进行二次处理。考虑到控制器运算速度,在设计模糊集时设计5 级,即负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)。变量喷药部分KP、TI两个参数的模糊规则分别如表1 和表2 所示。
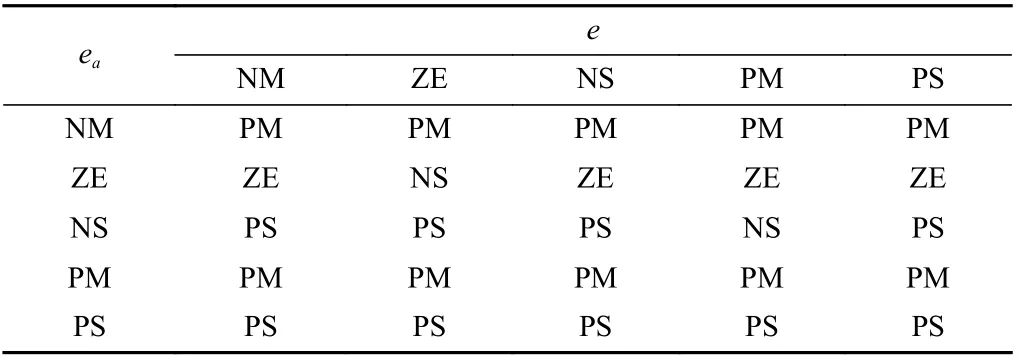
表1 变量喷药系统KP 模糊规则Tab.1 KP fuzzy rules of variable spraying system
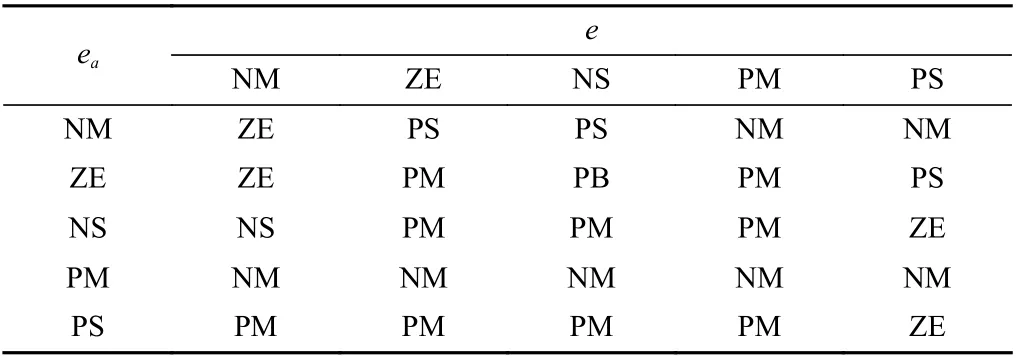
表2 变量喷药系统TI 模糊规则Tab.2 TI fuzzy rules of variable spraying system
变量喷药系统偏差e和偏差的变化率ea论域为{-1,-0.66,-0.33,0,0.33,0.66,1}。通过模糊变量确定KP、TI的隶属度函数,然后代入下式进行计算。
3.2 仿真分析
在MATLAB 的Simulink 中分别建立变量喷药系统PID 仿真与模糊PID 仿真,如图5 所示。

图5 变量喷药PI 与模糊PI 控制系统对比仿真Fig.5 Comparison and simulation of variable spraying PI and fuzzy PI control system
为验证系统响应时间、幅频特性与跟随能力,对变量喷药系统控制系统仿真对比输入阶跃信号与正弦信号,响应结果如图6 和图7 所示。
由图6 与图7 可以得出结论,变量喷药系统模糊PI 控制与常规PI 控制第1 次达到信号幅值所需时间分别约为180、250 ms,超调量分别在0.2%与0.1%左右。PI 控制算法自接收信号到稳定需要约1 500 ms,而模糊PI 控制算法则只需要800 ms;跟随特性上模糊PI 控制响应时间多于常规PI 控制,但超调量则明显小于PI 控制。
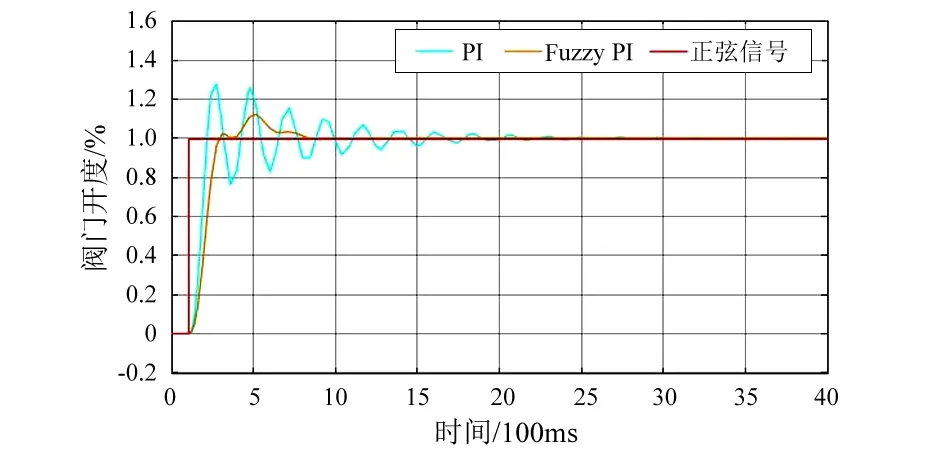
图6 变量喷药系统阶跃信号响应曲线对比Fig.6 Comparison of step signal response curves of variable spraying system
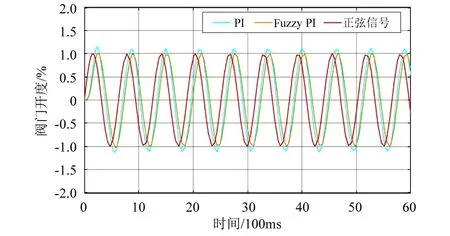
图7 变量喷药系统正弦信号响应曲线对比Fig.7 Comparison of sinusoidal signal response curves of variable spraying system
4 变量喷药系统试验
试验分为局部试验与综合试验两部分,首先验证喷头流量部分是否符合植保机械作业精度标准,在其满足作业要求后,进行田间综合性能测试,验证模糊PI控制的优越性。整个试验用水代替药液作为试验介质。
4.1 喷头流量控制试验
为更方便获取流量准确率数据,试验采用手动模式。根据GB/T 20183.2-2006《植保机械喷雾设备液力喷雾机每公顷试验方法》要求,首先调节喷药机动力输出主轴转速为540 r/min,然后打开喷药系统,调节流量开关阀将管道压力稳定在0.3~0.5 MPa。
根据不同作物生长周期特点与喷药经验,施药量范围是100~400 L/hm2[10]。试验时假设作业速度为7 km/h,考虑到喷头流量的适用范围,为提高喷药机“快速多喷”的适应性能,保证作业时安全系数,分别设定试验流量为30、40、60 L/min,同时设定喷头关闭组数量为0、1、2、3。在每个目标流量与喷头关闭数量水平下,用水桶采集任意5 个喷头1 min 内流出的水,称量并计算出实际流量,将实际流量与理论流量进行对比分析,结果如表3 所示[11]。
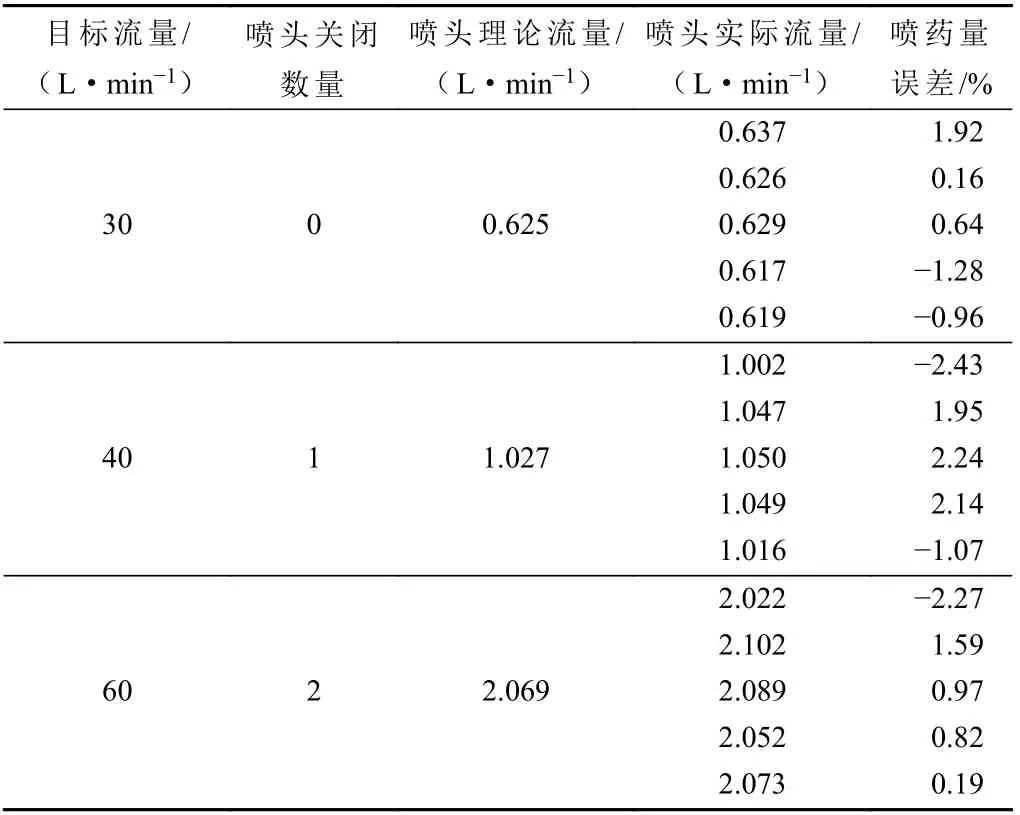
表3 喷头流量精度对比试验Tab.3 Comparison test of nozzle flow accuracy
由表3 可知,单个喷头理论流量与实际流量相对误差为-2.43%~2.24%,喷头关闭数目对误差无明显影响,符合标准规定的平均误差<2.5%的液力试验标准。
4.2 田间喷药试验
本文存在4 个可控因素:作业速度、喷幅内喷头开闭数量、理论施药量、控制策略。由于施药系统本质是机具随速喷药,考虑到在作业过程中主要存在两种作业模式,因此该试验分为定速试验与变速试验。田间性能试验如图8 所示。
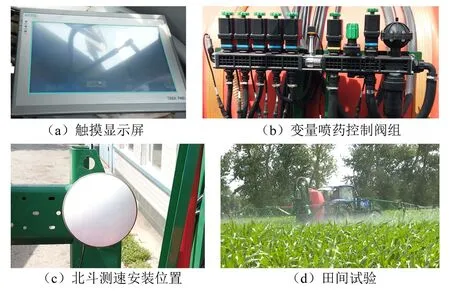
图8 田间性能试验Fig.8 Field performance test
试验前给药箱加水,直到达到额定水位;喷药结束后用上位机读取缓冲区内液位值计算出实际喷药流量;设定溢流阀压力为0.6 MPa,保护管路、开关阀组与喷头。
4.2.1 定速喷药试验
当作业速度过小时,喷药压力过低,施药效果不好,因此试验速度选取为5~9 km/h,分别让喷药机保持在6、7、8、9 km/h 下进行试验。本试验性质是4 因素多种水平,考虑到正交试验成本太高且严重浪费资源,故将行驶速度的4 个水平与理论施药量2 水平逐个匹配完成8 组试验,喷头关闭组数平均分布在8 组试验中,最后以实际流量与相对误差作为试验指标,其试验结果如表4 所示。
4.2.2 变速喷药试验
该状态是指喷药机在实际作业过程中行驶速度存在变化,但在施药系统的作用下实现喷药量实时调整。试验时行驶速度在5~9 km/h 范围内实时调整,其余因素设定等同定速试验,其试验结果如表4 所示。
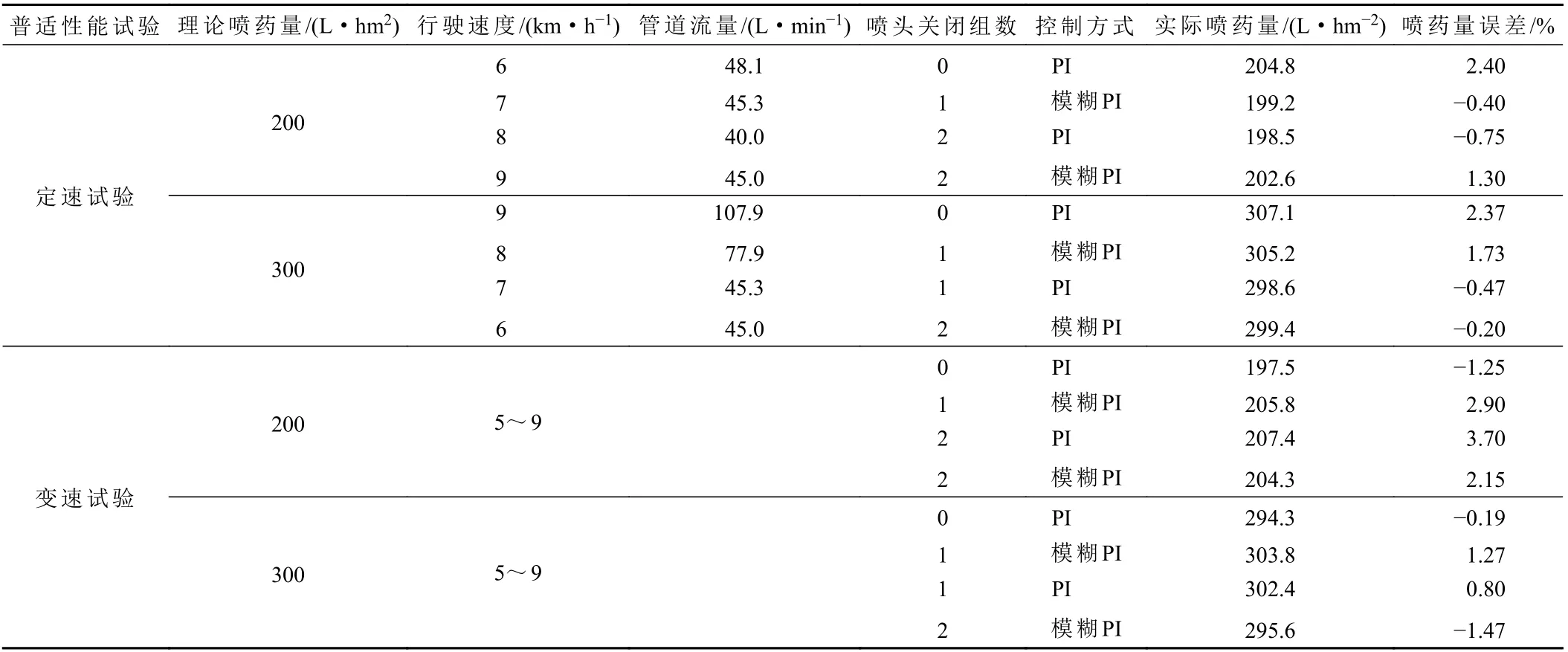
表4 田间综合喷药试验Tab.4 Field comprehensive spraying test
由表4 可知,定速喷药试验中PI 控制算法最大误差为2.4%,而模糊PI 控制算法最大误差为1.73%。在变速试验中,喷药误差明显高于定速试验,并且PI 控制算法误差<3.7%,而模糊PI 控制算法误差<2.15%,因此可认为在本变量喷药系统中,模糊PI 控制算法优于传统PI 控制算法。
5 结论
(1)在24 m 宽幅喷药机上加装了一种基于模糊PID 控制的变量喷药系统。该系统采用5 路开关电磁阀控制多组喷头开闭,结合多传感器实时直接改变主路流量,该系统精度高、稳定性好,具有良好的作业效果。
(2)开展了喷头流量控制与田间喷药性能试验。试验表明,在不同喷头开闭的情况下流量误差为-2.43%~2.24%;田间喷药试验模糊PI 控制优于PI 控制,其定速喷药试验误差<1.73%,变速试验误差<2.15%。
