新职业视域下重构工业机器人虚拟仿真课程资源探析
2022-03-21刘海燕
刘海燕,苏 宇*,苏 磊
(1.广西科技大学,广西 柳州 545006;2.柳州职业技术学院,广西 柳州 545006)
一、新职业与新职业教育
职业分类是反映经济结构特别是产业结构变化以及人口、就业结构变化的政策手段。[1-2]2019年4月,国家人社部、国家统计局、国家市场监管总局三大部门联合发布了13个新职业信息,其中,工业机器人系统操作员和工业机器人系统运维员作为工业机器人的两个新职业受到越来越多人的关注。新职业的发布,相应地会要求新的职业教育模式,从而加快改革发展,与之相对接。不同于传统教育存在的封闭化、缺乏实践经验以及对于时间严苛要求等问题,新职业教育具有持续化学习,智能化、碎片化、个性化等特点,注重培养能够适应社会需求的职业化人才,真正做到学以致用,用以治学。从工业机器人系统操作员与工业机器人系统运维员新职业定义标准中提炼两种新职业的综合要求(如图1所示),可以看出工业机器人系统操作员强调的是前端的软件应用、操作与编程,而工业机器人系统运维员则强调后端的硬件开发、调试与维护。
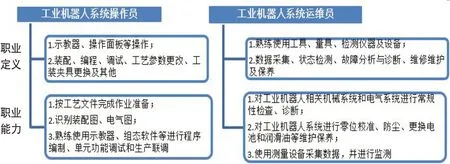
图1两种新职业对比
二、工业机器人各层次人才需求现状
对于开设工业机器人专业的高职以上院校来说,或多或少都存在工业机器人专业人才培养目标不清晰、各层次人才培养培育体系不完善、工业机器人开发与应用企业的职业岗位定位不明确等诸多问题。[3-7]在工业机器人开发与应用产业链上,对工业机器人的人才层次和人才类型等现实问题都缺乏系统的研究。[8-13]目前活跃在工业机器人市场上的技术技能型人才主要来源于以下三种类型:第一种是自动化专业毕业生,可以从事工业机器人开发、伺服驱动技术和电气装配等相关职业;第二种是机电一体化相关专业毕业生,可以从事工业机器人结构、系统集成应用等相关职业;第三种是原有的技术技能型人才,通过再培训适应工业机器人新岗位的职业需求。
在工业机器人专业人才需求上,需求量最大的还是基础操作及维护人员,以及掌握工业机器人应用技术的调试工程师和更高层次的应用工程师。专业型人才的巨大缺口成为阻碍工业机器人产业发展的最主要因素。而那些已经完成自动化生产线升级改造的企业,面临生产线系统的调试维护和工业机器人后期维护的成本等一系列问题。而目前相应的人才储备数量和质量却捉襟见肘。这就要求教育系统要与时俱进,制定切实可行的人才培养方案,建设工业机器人人才培养体系,提高与优化教学实验实训环境的使用水平,培育大批的工业机器人专业技术技能型人才。
三、工业机器人离线编程教学优势
通过ABB开发的RobotStudio离线编程软件,可以创建工业机器人典型行业应用工作站,并利用RobotStudio离线编程中的Smart组件的动画仿真功能,在工业机器人典型行业应用综合案例工作站中实现物料搬运、机床上下料、集成夹具动作、点焊、弧焊、周边设备动作等多种动画效果,使得工业机器人仿真工作站不仅可以与企业实际工作现场、工作任务、工作场景、工作时序等保持一致,还可以在工业机器人教学过程中,使学生能全面掌握典型行业企业应用中的工业机器人安装、布局、配置与程序调试等方法。[14-18]学生在使用ABB离线编程软件RobotStudio的学习过程中,可以按照老师的项目式教学要求,对照行业企业典型应用现场开展项目的实施。首先,一步步完成行业企业典型应用现场的设备调研和布局;其次,在RobotStudio软件中调用各个设备模型完成仿真工作站的创建;再其次,继续在仿真工作站中创建虚拟I/O系统、Smart组件、工作站的逻辑连接、Rapid程序编译、目标点示教;最后,实现仿真工作站的调试运行。通过上述工业机器人仿真工作站的项目实施,学生可以清晰地认识到创建工业机器人仿真工作站的整个流程,以及系统配置、机器人编程等要点,在实施过程中强化对所学知识点的理解运用,并且更具有操作性、便捷性和安全性。同时,在学习过程中学生还可以了解机械装置的运动仿真功能和机器人运动仿真技术,在就业后开展的工业机器人产线布局项目中,利用离线编程技术可大大缩短项目实施周期,提高方案的可靠性和调试工作效率。
在工业机器人离线编程软件RobotStudio中完全可以对标新职业“工业机器人系统操作员”的要求进行构建,如表1所示。其中PLC可编程控制器作为外部控制设备,同样可以在RobotStudio离线编程软件的Smart组件中加以实现;对企业现场的设备进行组态的软件,同样可以RobotStudio离线编程软件中的IO逻辑链接加以实现。如果想实现工业机器人的远程控制,则可以通过在Visual Studio软件中添加ABB机器人动态链接库,使用C#语言编写上位机应用程序实现对RobotStudio离线编程软件中的ABB机器人的远程控制。而对于单元功能调试和生产联调,同样在RobotStudio离线编程软件中通过机器人目标点示教、程序编译、路径规划、更换夹具、Smart组件功能、各工作单元的IO逻辑链接等操作,对建模布局后的工作站实现联调。

表1新职业和RobotStudio离线编程的知识点对比矩阵表
四、新职业下重构工业机器人虚拟仿真教学资源
对标新职业的职业教育模式,深化校企合作,对新职业下的工业机器人专业课程体系进行重构,促进创新型技术技能型人才培养,着力推进工业机器人虚拟仿真课程资源的建设与实践,并将相应成熟的研究成果向区内中高职学校进行推广,成为当务之急。本研究将以操作为主的技能培养模式,转变为以开发重构与典型工业现场一致的虚拟仿真教学环境及教学资源,来促进职业教育“双师型”师资队伍建设的目的。
(一)对标两种新职业,提出新职业教育模式
新职业的兴起,对职业教育提出了新的要求。对于工业机器人系统操作员和工业机器人系统运维员这两种新职业来说,各职业院校在工业机器人等相关专业的设置、课程内容、人才培养等方面,都不同程度地存在与制造业需求和技术发展脱节的现象。随着我国制造业产业不断升级、经济结构不断调整,紧跟行业企业的职业教育必须尽快适应科技发展趋势和市场的需求,对职业教育的现状也将提升到更新、更综合的领域,这对职业教育而言是个巨大的挑战。恩格斯说:“社会一旦有技术上的需要,这种需要就会比十所大学更能把科学推向前进。”①在此形势下,对标工业机器人系统操作员和工业机器人系统运维员这两种新职业,通过互联网平台、行业企业、职业教育等多元主体共同参与的模式,共同构建一个校企深度融合的新职业教育教学环境,已是大势所趋。
(二)分析工业机器人专业的职业性能
进入工业机器人行业,每天要跟工业机器人及外围设备打交道,实用性、操作性极强,如果不会动手操作,那么一切都是纸上谈兵。工业机器人需要掌握以下知识面。
(1)机械类基础技能:要求能看懂机械图纸;会使用二维和三维软件制图,可以完成机械部件的设计工作;完成关键性部件的结构分析工作;具备行业内的专业知识等。
(2)机器人专业理论知识:掌握机器人运动中的数学计算,涉及空间描述、广义坐标、运动学、动力学、轨迹生成、控制学等相应的理论知识。
(3)机器人本体及编程:了解某些特定品牌的机器人本体结构、故障处理、坐标系应用、安全区域设定、运动指令、逻辑控制指令、机器人案例分析(搬运、码垛、上下料、焊接、涂胶等)、IO应用等知识。
(4)PLC电气与编程:工业机器人本体是一个标准设备,需借助周边设备和工业软件的配合使用,按照现场实际灵活运用。一个典型的工业机器人工作站,需要工装夹具、气缸、气阀、传感器、电机、传送带、导轨、变位机、机床CNC等外部设备的配合才能完整运行。外围设备的相互配合,就需要PLC进行控制协调,所以,学会通过工控PLC控制机器人的运行、停止以及程序的选择等项目集成应用,学会变频器、伺服电机、变位机等工业设备的控制编程及应用实践知识等至关重要。
(三)深度融合的校企合作模式,提高协同育人水平
2019年初,国务院印发的《国家职业教育改革实施方案》(国发〔2019〕4号),对进一步强化校企合作,深化产教研融合,拓宽育人渠道,提高人才培养质量和社会服务能力等方面进行了新一轮部署。本研究通过共建课程资源、打造“双师型”队伍,使校企双方充分发挥合作优势及校企双主体育人的作用,引入先进办学理念,通过资源整合,把产业项目转化为教学案例,以具有行业代表性的典型应用为原型,开发虚拟仿真教学环境和教学资源,以提高工业机器人专业人才的培养质量和水平。
解决工业机器人在生产制造业实际应用的诸多问题,对工业机器人在理论和应用上的研究有着非常重要的意义。本研究基于项目式教学的优势,利用现有的ABB多功能、多应用实训系统设备,创建目前工业机器人应用中的三种至六种典型综合案例。在应用工业机器人集成应用方案的前期设计、规划和实施上,技术人员往往借助于工业机器人专业离线仿真软件RobotStudio,对自动化生产线各个设备进行建模、布局及仿真研究。在项目方案实施过程中,通过仿真软件RobotStudio实现对实际生产过程的动态模拟仿真,不断调整从而达到更合理的配置规划目的,同时合理评价自动化生产线的可行性,对降低开发成本、缩短自动化生产线研发周期具有非常重要的作用。
(四)机器人上下料典型案例
当前加工制造行业,常见的是将工业机器人与数控机床CNC组合起来,由工业机器人替换人工后,完成自动化上下料工作,协同作业组成一个小型的柔性智造单元(FMC)。在这样的行业企业典型应用现场,为提高生产节拍,改由一台工业机器人给两台CNC数控机床进行自动化上下料,这就需要在RobotStudio软件中根据实际工业现场搭建自动上下料仿真工作站系统,设计ABB机器人对CNC数控车床进行上下料的协同作业。在此工作站中需要依次完成各个设备虚拟IO信号的配置、工业机器人系统配置、目标点Robtarget示教、各个设备逻辑链接、Rapid程序编写及调试,最终完成双机床自动化上下料的上料-加工-下料-输送全过程。在课程学习中,学生可以调研工业机器人与数控机床的自动化上下料应用情况,再通过在RobotStudio软件中双机床自动上下料虚拟仿真工作站的学习,进一步熟悉工业机器人上下料应用和设备选型布局技巧及上下料程序的编写技巧。
(五)机器人点焊(含变位机)典型案例
随着我国汽车行业的快速发展,国内市场竞争加剧和汽车生产线装备水平的提高,企业对车门点焊的可靠性有了更高的要求。采用工业机器人进行车身点焊,可以大大提高汽车生产线的产能、提高车门强度、降低不良率和人工成本。目前,工业机器人点焊已经成为轿车车门装配的主要连接方法,且点焊质量与焊接效率对轿车的质量与成本有着重要影响。在机器人应用中,变位机可改变加工工件的姿态,从而增大机器人的工作范围,在焊接、切割等领域有着广泛的应用。通过搭建机器人点焊工作站,学生不仅学会创建带变位机的机器人系统,还能学会创建变位机运动轨迹并仿真运行。
在此工作站中,需要依次完成车门点焊工作站布局、点焊I/O配置、点焊系统的配置、点焊常用数据(点焊设备参数、工艺参数、点焊枪压力参数)的设置、点焊常用指令(SpotL/SpotJ、SetForce、Calibrate)的使用、点焊程序的调试方法、点焊目标点的示教等,最终完成整个车门工作站的点焊工作过程。通过点焊工作站的学习,使学生熟悉工业机器人点焊基础知识和应用,学会工业机器人点焊程序的编写技巧。
本研究为机器人专业的学生提供内容丰富的教学资源,同样也适合从事工业机器人应用开发、调试、现场维护的工程技术人员学习和参考,特别是已经掌握了ABB机器人基本操作、需要进一步掌握工业机器人工程应用模拟仿真的人员参考。
五、结语
新技术、新经济、新业态,一定会催生新产业、新岗位,而新的产业和岗位一定需要新的职业教育和对新职教人才提出更高的要求。本文从新职业“工业机器人系统操作员”的职业定义和职业要求出发,提出了在工业机器人离线编程软件RobotStudio中重构典型工业现场(工业机器人上下料和工业机器人点焊)的教学资源思路。研究深度融合校企合作模式,引领开发工业机器人课程体系建设,不仅有助于培养新职业教育视角下技术技能型人才,培养动手实践能力强,适应生产、管理、售后等企业需求的人才;而且能提升学生的综合素质、专业素质,为其从事专业技术工作奠定良好的技能基础和素质基础。
注释:
①在恩格斯著作《致瓦·博尔吉乌斯》中,恩格斯对德国大学生瓦·博尔吉乌斯提出的“技术在很大程度上依赖于科学状况,那么科学却在更大更多的程度上依赖于技术的状况和需要”表示认可,并提出了“社会一旦有技术上的需要,这种需要就会比十所大学更能把科学推向前进”的论断。
