一种基于异源状态的星间链路零值标定方法
2022-03-19尚湘安
萧 鑫,尚湘安,乔 璐,高 杰
(1.中国空间技术研究院西安分院,西安 710000;2.东方红卫星有限公司,北京 100094)
0 引言
星间链路分系统是组网星座卫星中关键分系统之一,一般采用扩频伪码双向单程测量手段,测得星间距离和星间时差,是星座高精度距离测量及时间同步的基础。在算法解算中,系统零值(前向组合零值和反向组合零值)作为直接参数对测量准确度起着决定作用。目前文献[1-3]给出的系统零值标定方法都是基于星座采用地面钟源同源状态,对于在轨应用中实际的异源状态尚无应用经验。基于同源星座零值标定原理[4-6],提出星座异源状态零值标定方案设计,依据理论模型开展了详细的误差分析。经过理论分析及实物系统的测量试验,结果表明异源状态零值标定误差主要取决于星座时钟漂移特性和卫星遥测时效性。同源与异源零值标定状态的选用需要结合星上设备状态、星地地面测试系统精度等因素开展综合评估分析,异源标定能够实现整星标定状态与系统在轨应用的完全一致,减少地面多路高稳铷钟源的成本投入,该种状态的零值标定对工程应用具有一定参考和应用价值。
1 系统零值标定原理
双向单程伪码扩频距离时差测量系统关注的被测主体为1 PPS信号。星座组网的卫星使用高稳铷钟作为频率基准源(10 MHz),经过时间管理单元将频率基准分路产生整星其他分系统工作的频率源,同时过零检测产生1 PPS,作为本星时间系统时间物理基准。图1给出卫星时频基准测量系统及1 PPS生成原理。

图1 卫星时频基准测量系统及1 PPS产生Fig.1 Measurement subsystem of time & frequence reference and generation of 1 PPS
星间链路通过对本地1 PPS测量将带有时标的伪距测量信息星间传输至对方星,前返双向测量数据方程联立,钟差距离联合结算即可求得距离和时差。文献[1]已经给出经典的双向单程测量理论公式,联立方程如下:
TA=ΔtA+tB+τBA+rA
(1)
TB=-ΔtB+tA+τAB+rB
(2)
TA,TB分别为A星、B星测量的伪距值;tA,tB分别为A星、B星发射设备的发射时延;rA,rB分别为A星、B星接收设备的接收时延;τBA,τAB分别为B星到A星和A星到B星空间路径传播时延;ΔtA,ΔtB分别为A星、B星当前时刻测量的两星基准时钟的瞬时钟差。
通常A星与B星相对距离和速度均在有限范围内,在一次测量很小的时间间隔内,近似认为星间距离和时差是恒定的,且A、B间空间传播路径相等,即:ΔtA=ΔtB,τAB=τBA,下文用Δt、τ分别代替。
基于式(1)和式(2)的理论公式,通过方程联立可得:
(3)
(4)
Δt即测量时刻的星间时差,τ为A、B星的星间距离的时间表示(ns),星间真实空间距离τ乘以光速c即是。这两个量即系统所要获取的测量目标。在式(3)和式(4)中,都存在公用的因子部分,定义τAB=τA+rB,以前向组合零值表示A星发射时延与B星接收时延和,τBA=τB+rA,以返向组合零值表示B星发射时延与A星接收时延和。通过式(3)和式(4)可以清晰表明,双向单程伪码扩频测量系统中星间距离和时差的测量结果与前返向组合零值是线性相关的,系统零值的准确度直接决定着测量结果的准确度。
为更好地直观表示系统零值与星间测量结果的关系,将式(3)和式(4)中做如下定义:
(5)
(6)
T_cor定义为时差零值,为前向组合零值与返向组合零值之差的一半;D_cor定义为距离零值,为前向组合零值与返向组合零值之和的一半,带入式(3)(4)有:
(7)
(8)
显而易见,时差零值和距离零值是系统零值的最终反映,即表示对伪距测量结果的修正大小,二者和伪距测量直接决定星间测量结果。
上述章节重点论述了星间距离和星间时差的测量理论原理,通过A、B星测量的伪距值,系统前返向零值标定结果,即可联立解算出目标量。而零值标定基于此公式逆向处理,即获取一组系统零值设置为全0状态的测量结果,与此同时通过其他辅助手段获取测量时刻被测量真实物理状态的实际值,即可推算测量系统的零值。其解算原理公式如下:
τAB=TB+Δttest-τreal
(9)
τBA=TA-Δttest-τreal
(10)
Δttest为测量时刻仪器测量时差显示结果,τreal为双星星间信道连接状态的真实值。
2 同源与异源状态系统零值标定对比
目前,在星间链路系统零值标定领域众多方法中,为获取高准确度的零值标定结果,对标定过程部分扰动误差因素采取一些措施进行等价简化,降低复杂性,最多的手段之一就是A、B星测量系统进行同源共钟,一般用地面铷钟替换星上铷钟,由此带来的好处就是双星系统频率共基准,相参性好,测量数据稳定,特别是时差测量,其测量曲线表现为带有测量误差的定值曲线,可以通过一段时间内数据滤波处理即可简便测得准确精度。而异源状态由于铷钟钟漂的存在,时差测量曲线表现为渐变斜线[7-8],且斜率随钟漂时间特性而变化,这给时差的真值统计引入一定的难度。图2和图3分别给出两种状态时差测量曲线的规律特性。
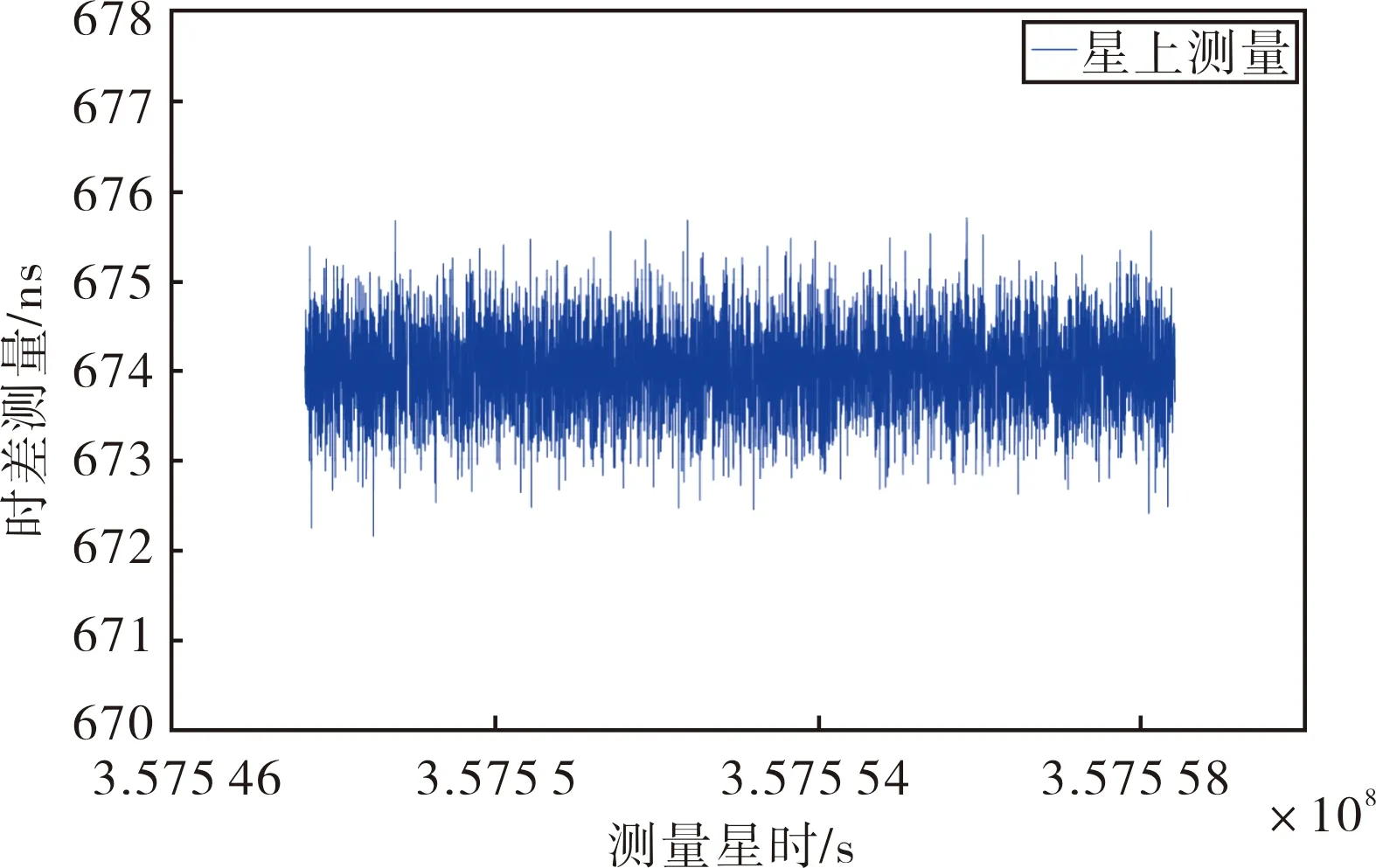
图2 同源状态时差测量曲线(定值线)Fig.2 Measurement graph of TDOA under homology reference
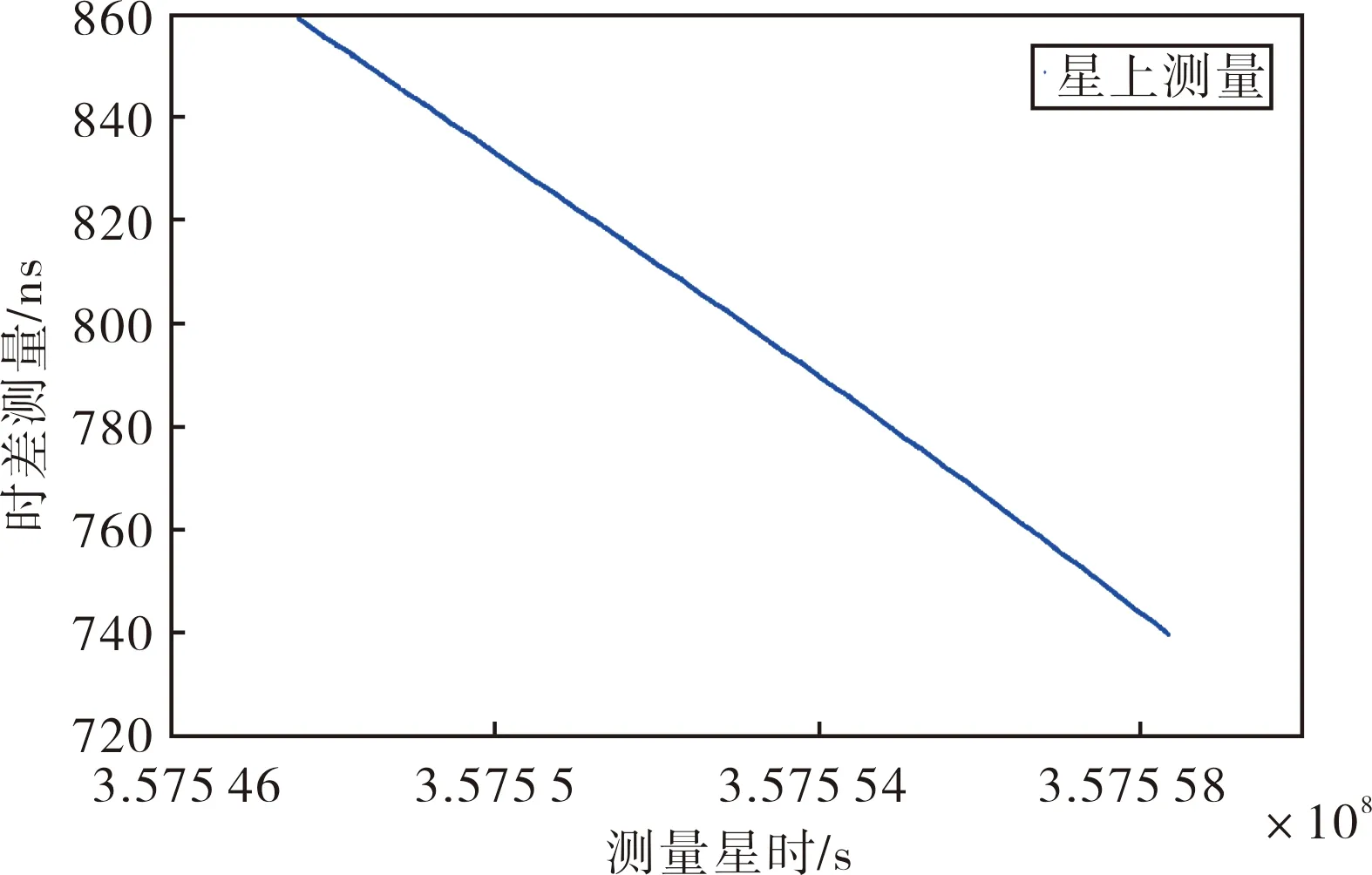
图3 异源状态时差测量曲线(一次斜线)Fig.3 Measurement graph of TDOA under different reference
同源状态在数据处理方面带来的便利性是显而易见的,但相对于异源状态也存在自身的不足,决定了真实使用的异源状态迫切需求。主要涉及以下两个方面:
1)在轨应用状态的一致性:同源状态采用星地铷钟相似性替代原则,而并非卫星在轨使用的真实状态,标定状态不能对系统给出最真实的反映,往往在等价性上考虑不充分,隐藏潜在不合理性的风险;
2)星地铷钟替换的局限性:地面铷钟和星上铷钟在指标上相近,但仍存在一定差距,地面铷钟相对设计简单,控温措施少,易受环境影响,特别是设备指标性能的差异,对于测量系统直接引用为基准频率源,系统环节众多复杂程度高,由此引入的影响在实际工程中往往是很难分析彻底。
3 异源零值标定系统组成及标定流程
相对于同源系统零值标定,异源状态相对简单很多,标定系统由双星前返信道、时差仪器测量设备、频差仪器测量设备、整星测控系统和零值标定数据处理计算机5个部分组成,标定系统原理如图4所示。前返信道用于模拟星间传输空间,由射频电缆组件和可调衰减器组成,其中可调衰减器用于调整标定信号电平。时差测量选用高精度时间间隔分析仪,实际使用Keysight公司的53230A,直接测得双星时间基准1 PPS的相位关系。频差测量作为辅助监控手段,用于直接测得双星铷钟10 MHz的频率差,以反算评估时差的漂移特性。整星测控系统用于星上测量数据的获取,星间链路实时测量结果通过整星遥测下传地面,作为零值标定的基础数据。零值标定数据处理计算机通过自动采集获取仪器测量值及卫星测量原始数据,联合解算出前返向组合零值,并可实现零值上注自主验证和误差评估。
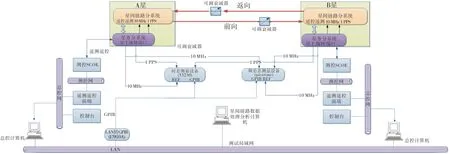
图4 星座异源零值标定系统原理框图Fig.4 Diagram of system delay calibration under different refrence
系统零值标定流程如图5所示,详细过程如下:

图5 异源零值标定流程Fig.5 The process of delay calibration under different refrence
1)信道传输时延标定,使用矢量网络分析仪对前向、返向射频传输信道的时延特性进行标定,取前向链路时延(L1),返向链路时延(L2),则传输信道时延(L)如式(11)所列:
L=0.5×(L1+L2)ns
(11)
2)调整信道衰减器,保证前返向接收到的信号电平为中强电平;
3)待星座打通,星间测量功能正常,稳定工作1 h后,在数据处理计算机中设置星间标定距离L值,获取一段时间内相关数据,解算组合零值;
4)将解算结果上注,观测星间链路测量显示值与实际真值的差距,评估标定零值的准确度,完成零值标定。
4 零值标定误差分析
4.1 时差仪器测量误差分析
在整星标定时,为便于标定测量,一般每颗星输出一路TTL的1 PPS,与其他分系统使用的LVDS的1 PPS相比,二者在相位上是对齐的,标定时A星1路接时间间隔分析仪的A通道,B星1路接分析仪的B通道,需要说明的是连接两路信号的电缆为相同型号规格的等长电缆,以减小不对称引入的影响。分析仪采用53230A,时差信号的仪器测量误差主要包括仪器本身测量误差和连接电缆等长误差,其中仪器本身测量误差包括测量分辨率不确定度、触发不确定度和双通道固定时延不确定度等[9-12],这里直接引用仪器官方指标数据0.100 ns。1 PPS的测试电缆一般都是成对定制,长度在5~10 m,长度误差按1%计,其他介质及接口因素误差忽略,该项误差为0.333 ns。
(12)
εΔt为时差仪器测量总误差,εInstru为仪器本身测量误差,εTTL-Link为1 PPS测试电缆不一致性误差。
4.2 信道时延标定误差分析
双星星间链路通过双向有线信道连接,前返向有线信道标定使用Keysight PNA系列N5244B,测量误差由仪器误差决定,引用仪器不确定度0.1 ns,标定误差有:
(13)
ετ为信道标定时延,εAB为前向标定误差,εBA为返向标定误差。
4.3 星上伪距测量误差分析
星间链路分系统采用伪码测距,其伪距测量的结果与伪码速率、载波环路和码环设计、输入信噪比以及时钟稳定性等众多因素有关,标定时简化因素,高信噪比条件规避噪声误差,将一段时间内测量均值作为理论值,数据的RMS作为测量误差,其误差为高斯分布。经过分系统测量,其伪距测量误差εt=0.3 ns。
4.4 标定时刻时效性误差分析
在实际标定中,自动零值标定系统接收星上下传的遥测,提取星上测量结果,同时使用遥测推动策略,在收到遥测同时,提取时差仪器测量值。其中,星上带有时标信息的测量数据经星务分系统遥测下传,从星间将数据发出到星务的解析、组包、下传,在地面接收解调处理后拿到遥测数据标定时刻与星上测量时刻往往存在一个时延,该时延是在一个范围内的不确定值,星间一旦开机该时延值就确定不变。标定时刻t0与实际测量时刻t1由于上述测量系统时效性带来偏差Δt,同时异源状态下各星铷钟自身频率漂移特性引入时差的时变性,从而引入误差ΔM,反映在标定算法上即为标定时刻与测量时刻不同步在异源状态下的显现。该误差与整星星地测量大系统的时效性和异源时差变化斜率成正比,图6给出时效误差引入的原理。
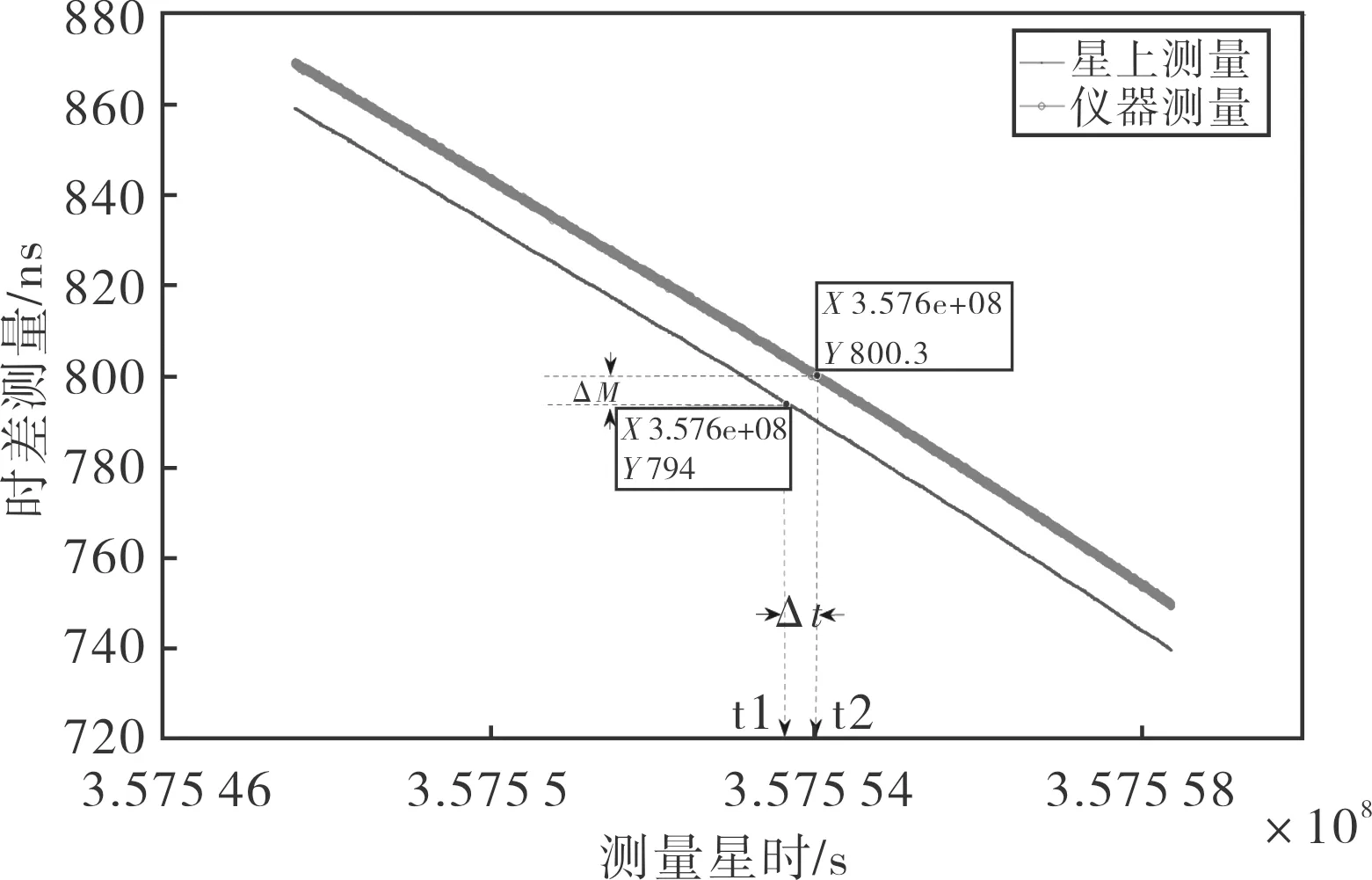
图6 测量时效性误差引入原理分析Fig.6 Error analysis of measurement currency
星地测量大系统的时效性不仅与测量系统处理时间(处理时间很短可以忽略)、星上遥测机制(速变/缓变轮询间隔)相关,而且与星地遥测传输时延有关,在此统筹分析,实际标测系统星务提供时效性时延数据小于2秒。对于钟差的时漂斜率,与被测铷钟自身设备频率特性决定,当两钟频率漂变同向,反映到时差变化率小,反之,时差变化率大。
εTs=Δt×ΔM=2×0.67=1.34
(14)
εTs为时效性误差,Δt为系统标定与测量时刻时延,ΔM为时差仪器测量拟合斜率。
4.5 星上1 PPS状态不一致性误差分析
在时差测量标定的结果上,需要特别注意的一点是被测量时基1 PPS和卫星使用的1 PPS非同一信号,二者与仪器测量1 PPS(TTL信号)是一个源信号分路引出,在秒信号分路与去向不同分系统传输路径的不一致必将引入不一致误差。如果在型号研制中对此处相关项的一致性和稳定性采取严格指标控制,星上状态不一致性误差是可以忽略的。

表1 星上1 PPS状态不一致误差因素分析
4.6 零值标定误差小结
1)异源下零值标定总误差ε,
若考虑星上状态不一致性:
若不考虑星上状态的不一致性:
2)通过误差量值,1 PPS信号的一致性误差对零值标定的总误差影响较大,该项应作为关键参数在系统研制过程进行严格控制与测试考核;
3)根据式(5)、式(6)可以发现,前向组合零值与反向组合零值虽然会受到仪器测量值的时效性影响,其作用是反向的,但距离零值为二者之和,在距离测量上该误差影响被正反抵消,该误差主要影响的是时差测量结果;
4)零值标定误差对距离零值影响较小,主要因为一方面信道距离时延标定误差很小,另一方面原理公式中前返向组合零值求和过程中,将时差项互消,规避了大误差量的时差对其影响;相反可知,对时差零值影响较大。
4.7 工程试验零值标定结果
基于上述测量理论,在某型号研制过程中采用异源零值标定方案在整星阶段进行了实测,被测型号在星上状态一致性方面在研制过程中进行了严格控制,通过对不一致性关键项目指标实测,总误差在0.5 ns以内,鉴于误差很小,标定过程中,将仪器测量秒信号与整星基准秒等价代替,两星的铷钟常温常压下漂变不是很大,时差拟合斜率为0.53。零值标定前后数据及组合零值实测结果如下图7和表2所示:
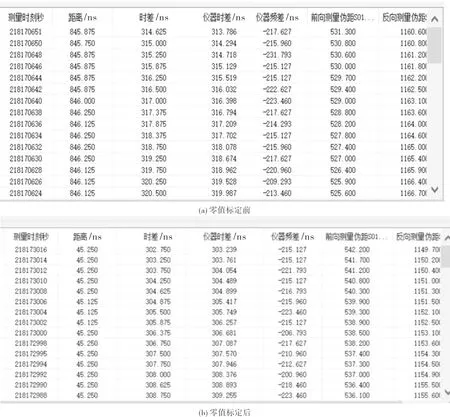
图7 自动零值标定系统实测数据Fig.7 Measured datas of auto delay calibration system

表2 异源状态零值标定结果分析表
4.8 零值标定实测结果总结
1)采用异源状态零值标定的结果,其对应时刻距离测量值与真值相差在0.25 ns以内,时差测量值与仪器测量值相差在0.6 ns以内;
2)在异源状态下,零值标定误差的主要受标定时刻时效性误差决定,其他仪器标定类的误差因子对总误差贡献不大,其中时效性误差与星座时钟频率漂移特性和卫星遥测时效性两个因素相关;
3)星座的频率基准铷钟选择不同,对于时差零值有一定影响,从实测数据看更换铷钟带来的零值数据最大偏差在2.319 ns,由此可以得出,同源标定使用的等价状态替换,是不能真实反映系统的实际状态,有潜在的不确定性;
4)对于系统零值标定,到底如何选择同源和异源两种标定状态,是需要综合考虑星上相关状态,如果星上设备状态一致性控制的很好,钟源的替换对系统状态真实反映带来的影响不大,显然同源标定是简便有效的,反之就要直接对星上异源真实状态标定。然而,受遥测时效性和钟漂的共同作用,导致异源标定也是存在使用条件的,如果钟漂剧烈,时差变化大,同时遥测时效性太低的情况下,显然异源标定的误差将急剧放大,不再适合使用;
5)针对异源标定状态的时效性,可以采取一些辅助手段降低时效性误差,一种是对遥测时效性进行标定或同步,一种是降低两钟的漂变速率,如放入真空环境,由此带来的代价是测试系统的复杂性和成本的增加。
5 结论
本文基于双向单程伪码扩频测距原理,针对影响测量系统结果的系统零值标定展开深入研究,提出异源状态系统零值标定方法,并对其误差因素给出详细分析。通过理论分析表明,异源零值标定误差主要取决于星座时钟漂移特性和卫星遥测时效性,星上状态不一致性的误差在工程实现过程中,通过严格指标控制是可以降低至可接受范围内。实测数据结果表明,在一定的应用条件下,异源状态下的零值标定能够满足整星系统距离和时差测量的指标要求,特别是异源标定状态与系统在轨使用真实状态的高度一致性,在工程实践中具有一定的参考和应用价值。
