光学航天器中继天线微振动测试与分析
2022-03-19丁辉兵
王 辉,丁辉兵,周 勇
(中国空间技术研究院西安分院,西安 710000)
0 引言
光学航天器是一种以光学设备为主要载荷的航天器,为了将光学设备获取的信息传输给其它空间飞行器或地面,光学航天器通常会搭载有可动的通信天线,中继天线(data relay antenna, DRA)是其中一种[1-2]。中继天线工作时,其反射器在两轴驱动组件的驱动下发生转动,由于电机振动、机构间隙、驱动控制的不平滑等原因,中继天线反射器在转动过程中有可能产生轻微的抖动,该抖动为航天器微振动中的一种来源。以光学设备为主要载荷的航天器其本身的指向精度和分辨率等性能指标通常都比较高,对星上的各种微小扰动十分敏感,因此需要考虑该微振动带来的影响[3-7]。
除了可动天线转动带来的扰动外,航天器微振动的其它诱因还包括星上转动部件(如动量轮、控制力矩陀螺)高速转动、航天器变轨调姿期间推力器点火工作、低温制冷器压缩机和百叶窗等热控部件机械运动、大型柔性结构受激振动和进出阴影时冷热交变诱发热变形扰动等。目前国内外对于动量轮、控制力矩陀螺、低温制冷器压缩机等引发的微振动及抑制措施等有大量的相关研究内容[8-13],关于星载可动天线工作时引发的微振动研究则相对较少,仅文献[14]对基于步进电机的双轴驱动天线进行了建模仿真和测试,由于受到条件的限制,该研究未能全面反映天线工作状态中的振动特性。本文从电机、驱动单元、机构三种状态下的振动测试结果对中继天线的微振动传递特性进行分析[15],通过仿真和试验相结合的方式获得天线整体状态下的微振动特性。
1 中继天线微振动测试
1.1 测试对象
中继天线主要由展开臂、双轴驱动机构、反射器组成,如图1所示。其中两轴电机是主要的扰动源,为了分析天线微振动的传递特性,需要从电机、驱动单元、机构层级三方面分别进行测试。微振动测试采用KISTLER9119AA2型六分量测力传感器。
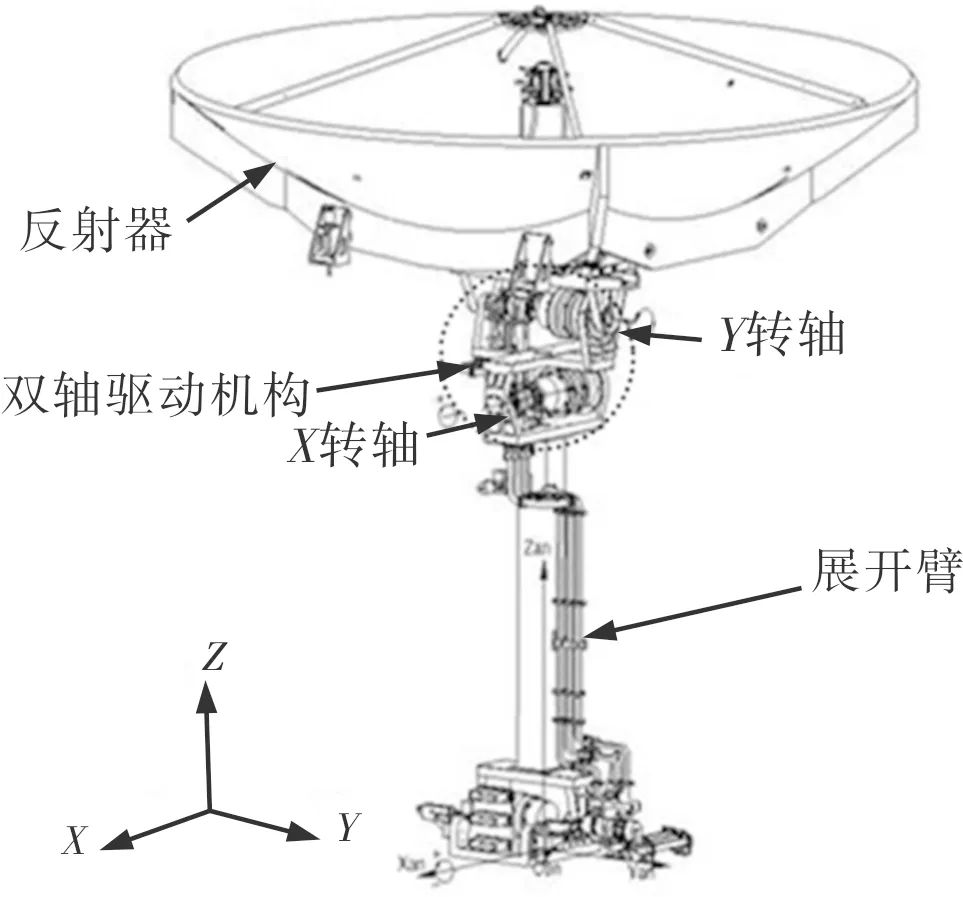
图1 中继天线外形示意图Fig.1 Configuration of the DRA
1.2 电机扰振特性测试
中继天线所使用的驱动电机分为步进电机和直流力矩电机两类,为了进行对比选型,针对两类电机的振动扰动特性分别进行了测试。电机的安装测试状态如图2所示:

图2 电机测试示意图Fig.2 Micro-vibration test of electromotor
在相同转速下对比两类电机的微振动测试结果如图3、图4所示,发现以下现象:
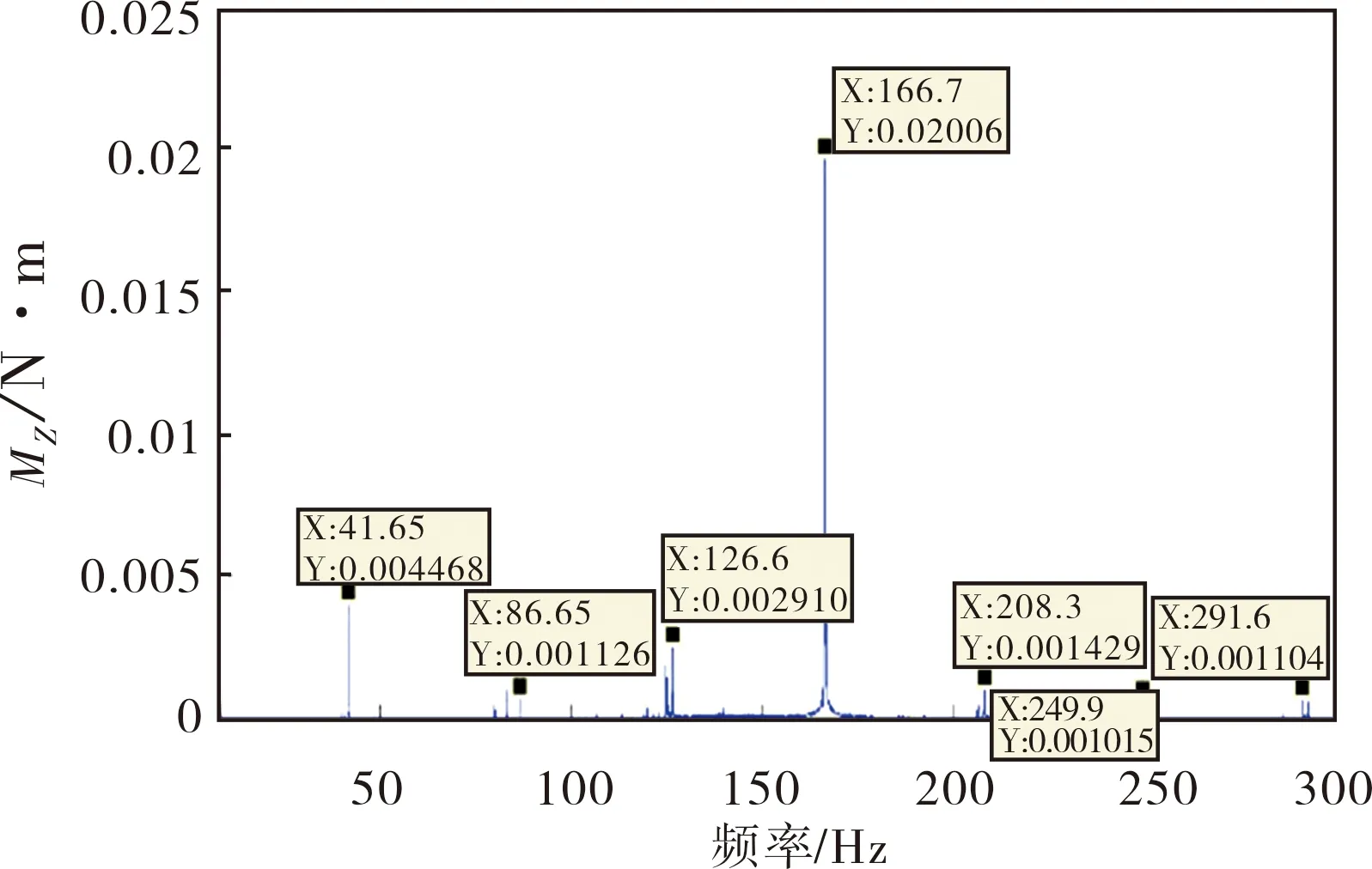
图3 步进电机绕转轴微振动测试曲线Fig.3 Micro-vibration curve of step electromotor rotating around axis

图4 直流电机绕转轴微振动测试曲线Fig.4 Micro-vibration curve of torque electromotor rotating around axis
1)直流电机和步进电机都表现出谐振点不随转速变化的特点;
2)直流无刷力矩电机在8~300 Hz范围内的谐波点较步进电机要少很多,尤其是在较高频率段谐波点量级降低明显;
3)直流电机绕自身转动轴(图2中Z轴)的力矩Mz比步进电机Mz小两个数量级,步进电机绕Z轴最大力矩为0.02 N·m,而直流力矩电机绕Z轴最大力矩仅为0.000 1 N·m左右;
1.3 驱动单元扰振特性测试
驱动单元主要由驱动电机、谐波减速器及旋转变压器构成。驱动电机产生转动,经由谐波减速器进行减速,然后输出到天线载荷端,驱动单元微振动试验电机采用直流力矩电机,谐波齿轮传动的传动比i=100。驱动单元的扰振测试安装状态如图5所示:

图5 驱动单元微振动测试状态Fig.5 Micro-vibration test of driving-unit
驱动单元扰振测试结果表明,虽然经过了谐波减速器的传递,驱动单元安装接口处的微振动并未比电机直接产生的振动大多少,即驱动单元对于电机的振动放大并不明显。如图6所示是单元扰动力矩的测试曲线。

图6 驱动单元绕转轴微振动测试曲线Fig.6 Micro-vibration curve of driving-unit rotating around axis
1.4 机构扰振特性测试
由于中继天线反射器在地面环境下产生的重力矩比驱动单元的驱动力矩要大的多,因此测试驱动单元转动对天线安装根部的扰动时,为了降低重力的影响,需要将反射器拆除,中继天线机构扰振状态如图7所示。

图7 中继天线机构微振动测试示意图Fig.7 Micro-vibration test of mechanism
考虑到机构的扰振传递特性与机构的结构频率有着必然的联系,因此首先对机构的模态频率进行了测试,机构X向主要结构频率有:7.6 Hz,40.0 Hz,48.1 Hz,Y向主要频率有:8.8 Hz,24.4 Hz,33.5 Hz。
机构安装根部扰振力在两轴不同转速组合下的测试结果(选取0~300 Hz范围内相对较大值)如表1所列:

表1 机构安装根部微振动测试结果
结合机构结构频率和扰动测试结果可以看出,机构扰振力的大小主要由两个驱动轴中扰振效果最显著的那个驱动单元(即最大扰振源)所产生的扰振力决定,扰振力频点与机构的结构频点是对应的,最大扰振力及力矩一般出现在最大扰振源激励方向的一阶结构频率处。
2 天线扰振特性分析
由于中继天线反射器是二维转动的,目前的技术条件很难对二维转动天线实现完全的重力卸载(所谓完全卸载即卸载后的残余重力对微振动测试不产生影响),因此对于中继天线的整体微振动测试主要是采取仿真分析和试验相结合的方式,其具体步骤如图8所示:根据天线上述5种状态模态有效质量分析结果,反射器绕某一轴偏转90°结果与偏转-90°结果差别非常小,可以看作是一种状态,因此微振动仿真计算及结构阻尼修正时仅考虑其中3种状态,这3种状态分别是X/Y轴都处于0°位置状态、X轴为0°,Y轴为-90°位置状态和X轴为90°,Y轴为0°位置状态。结构阻尼修正的方法是根据天线各状态振型与模态有效质量分布判断,与机构振型相同且有效质量分布相近的选取同一阻尼。天线与机构的对应模态频率如表2所列:

表2 天线与机构的对应模态频率表

图8 中继天线整机微振动测试和仿真分析流程Fig.8 Flow chart about DRA micro-vibration test and simulation
微振动仿真分析时为了覆盖天线在轨各种结构状态,选取了天线在轨5种极端构型状态,如图9所示。

图9 中继天线在轨极端位置状态Fig.9 Five utmost state of DRA on orbit
机构与天线仿真时选取驱动单元的微振动实测值作为激振力输入,具体如图10、图11所示:

图10 中继天线三个方向激振力输入Fig.10 Input of micro-vibration forces for DRA

图11 中继天线三个方向激振力矩输入Fig.11 Input of micro-vibration torques for DRA
激振输入位置为驱动单元在双轴驱动机构的安装处,天线微振动仿真结果如表3所列:

表3 中继天线微振动仿真结果
从分析结果上可以看出天线在0~300 Hz范围内扰振力小于0.06 N、扰振力矩小于0.05 N·m。
3 结论
根据中继天线微振动测试与仿真分析主要得出以下几个结论:
1)对步进电机与直流电机进行综合比较,直流电机的扰振特性比步进电机要好;
2)采用直流力矩电机的驱动单元微振动量级与直流力矩电机相当;
3)从机构的微振动测试结果和天线整体仿真结果来看,微振动的频点与机构以及天线的结构频点相关,且结构高频处的微振动衰减比较明显,因此最大扰振力一般出现在结构最大激励源方向的一阶频率处。
